激光測(cè)距系統(tǒng)的最基本原理就是測(cè)量激光脈沖在空間傳播的時(shí)間間隔,從而獲得被測(cè)量的距離。針對(duì)相位法激光測(cè)距的基本原理與實(shí)現(xiàn)方法進(jìn)行研究,本文結(jié)合了嵌入式、差頻測(cè)相等相關(guān)技術(shù)和實(shí)時(shí)操作系統(tǒng)μC/OS-II 的優(yōu)點(diǎn),硬件結(jié)構(gòu)合理,軟件實(shí)現(xiàn)方法靈活,滿(mǎn)足了網(wǎng)絡(luò)化實(shí)時(shí)高速信息提取和傳輸?shù)囊蟆?#系統(tǒng)軟件設(shè)計(jì)
2014-05-22 10:31:03 1852
1852 實(shí)現(xiàn)汽車(chē)防碰撞,關(guān)鍵還在于測(cè)距防碰撞系統(tǒng)的應(yīng)用。本系統(tǒng)由測(cè)距模塊、控制計(jì)算單元、顯示單元、報(bào)警單元、執(zhí)行單元等組成。其中測(cè)距模塊包括汽車(chē)前進(jìn)時(shí)工作的激光測(cè)距模塊和汽車(chē)倒車(chē)時(shí)工作的超聲波測(cè)距模塊。
2018-10-09 09:28:008227 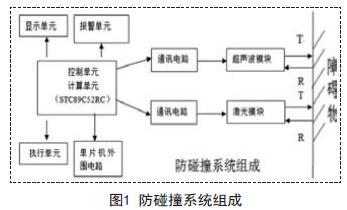
激光雷達(dá)的探測(cè)距離是最關(guān)鍵的性能參數(shù)。激光測(cè)距性能方程是激光測(cè)距系統(tǒng)設(shè)計(jì)的理論基礎(chǔ),用于估算激光測(cè)距系統(tǒng)的最大探測(cè)距離。
2023-09-14 09:16:151638 
駕駛輔助系統(tǒng) (ADAS) 技術(shù)進(jìn)行大幅改進(jìn),并實(shí)現(xiàn)對(duì)所有安全關(guān)鍵型功能的適當(dāng)管理。圖 1:自動(dòng)駕駛等級(jí)自動(dòng)駕駛汽車(chē)使用多項(xiàng)傳感器技術(shù),包括攝像頭、雷達(dá)和激光雷達(dá)。根據(jù)不同的環(huán)境條件和距離,這些傳感器
2022-11-04 07:53:46
最近看到國(guó)外無(wú)人駕駛汽車(chē)用到激光探測(cè) 實(shí)時(shí)顯示三維地圖 頓時(shí)感覺(jué)神馬紅外 超聲波 攝像頭都屌爆了!!
2015-10-29 05:32:50
畢業(yè)設(shè)計(jì)是激光測(cè)距,比較頭疼,求指教。關(guān)于激光測(cè)距的實(shí)現(xiàn)!希望大家給點(diǎn)繃住,謝謝大家
2013-02-02 12:38:48
,適合各種高精度測(cè)量用途。用途激光測(cè)距儀廣泛用于地形測(cè)量,戰(zhàn)場(chǎng)測(cè)量,坦克,飛機(jī),艦艇和火炮對(duì)目標(biāo)的測(cè)距,測(cè)量云層、飛機(jī)、導(dǎo)彈以及人造衛(wèi)星的高度等。它是提高高坦克、飛機(jī)、艦艇和火炮精度的重要技術(shù)裝備。由于
2018-01-31 16:50:50
`汽車(chē)防撞探測(cè)器:一般來(lái)說(shuō),大多數(shù)現(xiàn)有汽車(chē)碰撞預(yù)防系統(tǒng)的激光測(cè)距傳感器使用激光光束以不接觸方式用于識(shí)別汽車(chē)在前或者在后形勢(shì)的目標(biāo)汽車(chē)之間的距離,當(dāng)汽車(chē)間距小于預(yù)定安全距離時(shí),汽車(chē)防碰撞系統(tǒng)對(duì)汽車(chē)進(jìn)行
2018-11-12 11:07:16
激光測(cè)距模塊在自動(dòng)化系統(tǒng)中的作用?
2015-07-23 10:36:58
高價(jià)懸賞 不管你是公司還是個(gè)人,只要你能為我司解決激光測(cè)距的電路問(wèn)題,我司將重金答謝。具體要求如下: 激光測(cè)距儀電路板技術(shù)指標(biāo)一、電路板尺寸要求: 基本大小 66.5mm*80mm*15mm 孔距
2016-03-27 10:24:56
測(cè)距機(jī)上的探測(cè)系統(tǒng)接收。測(cè)出從激光發(fā)射時(shí)刻到反射光被接收時(shí)刻之間的時(shí)間間隔t,根據(jù)已知光速,公式:S=Ct/2(S距離;C激光空氣中速度;t發(fā)射和接收回波的時(shí)間差。激光測(cè)距方案和關(guān)鍵...
2021-09-14 08:24:39
求一激光測(cè)距雷達(dá)模塊最大測(cè)距30~50米即可測(cè)量精度10cm(要求可稍稍降低)價(jià)格在1000元以?xún)?nèi)
2015-07-09 16:01:13
激光測(cè)速測(cè)距儀的測(cè)量原理是什么?
2015-09-03 17:28:22
提出了運(yùn)用“貓眼”效應(yīng)原理對(duì)激光竊聽(tīng)技術(shù)進(jìn)行改進(jìn)的方案,分析了功率對(duì)比度與離焦量的關(guān)系。竊聽(tīng)過(guò)程中,音頻振動(dòng)信號(hào)對(duì)功率對(duì)比度進(jìn)行調(diào)制,探測(cè)功率對(duì)比度并進(jìn)行解調(diào)可實(shí)現(xiàn)激光竊聽(tīng)。經(jīng)驗(yàn)證型實(shí)驗(yàn)分析,該方法
2014-11-05 11:42:15
了概念階段,發(fā)展到了對(duì)各項(xiàng)技術(shù)的積極研究當(dāng)中。而其中的某些技術(shù),已經(jīng)成為科技公司和汽車(chē)企業(yè)都表示“必須拿下”的關(guān)鍵所在,比如激光雷達(dá)。激光雷達(dá)有多重要?顧名思義,激光雷達(dá)就是以發(fā)射激光束探測(cè)目標(biāo)的位置
2017-10-20 15:49:06
的雷達(dá),一般會(huì)采用相干體制。按應(yīng)用分類(lèi),我們可以分得更多,比如:激光測(cè)距儀、激光三維成像雷達(dá)、激光測(cè)速雷達(dá)、激光大氣探測(cè)雷達(dá),等等。按照距離測(cè)量的原理劃分,有兩種方式:1.一種是TOF技術(shù),即Time
2017-09-19 15:51:15
Braking(AEB)AEB 是一種汽車(chē)主動(dòng)安全技術(shù),主要由 3 大模塊構(gòu)成,其中測(cè)距模塊的核心包括微波雷達(dá)、激光雷達(dá)和視頻系統(tǒng)等,它可以提供前方道路安全、準(zhǔn)確、實(shí)時(shí)的圖像和路況信息。AEB 系統(tǒng)采用雷達(dá)
2017-10-18 17:18:24
行業(yè)的興起,激光測(cè)距雷達(dá)已成為機(jī)器人體內(nèi)不可或缺的核心部件,配合SLAM技術(shù)使用,可幫助機(jī)器人進(jìn)行實(shí)時(shí)定位導(dǎo)航,,實(shí)現(xiàn)自主行走。思嵐科技研制的rplidar系列配合slamware模塊使用是目前服務(wù)機(jī)器人
2020-07-14 07:56:45
如題,CW模式主要用于探測(cè)速度,可是我只想探測(cè)距雷達(dá)10m以?xún)?nèi)車(chē)輛的速度,該如何限制雷達(dá)的探測(cè)距離呢?
2016-08-22 09:52:14
Dimetix AG致力于為各種需要多用途測(cè)距傳感器、激光傳感器的行業(yè)提供設(shè)備。基于徠卡測(cè)量系統(tǒng)許可使用的DISTO技術(shù),Dimetix開(kāi)發(fā)的激光測(cè)距設(shè)備特別適用于工業(yè)環(huán)境。近日,Dimetix
2018-10-24 14:09:11
的電子電路必須能分辨出以下極短的時(shí)間:0.001m(3X10^8m/s)=3ps要分辨出3ps的時(shí)間,這是對(duì)電子技術(shù)提出的過(guò)高要求,實(shí)現(xiàn)起來(lái)造價(jià)太高。但是如今的激光傳感器巧妙地避開(kāi)了這一障礙,利用一種
2018-04-27 12:32:51
proteus中可以用什么組合來(lái)實(shí)現(xiàn)具有激光測(cè)距傳感器的功能
2015-05-20 14:58:45
,甚至前車(chē)的下方空間進(jìn)行探測(cè),為視覺(jué)系統(tǒng)提供更豐富的數(shù)據(jù)。
激光雷達(dá)被認(rèn)為是 L3 級(jí)及以上自動(dòng)駕駛必備傳感器。激光雷達(dá)兼具測(cè)距遠(yuǎn)、角度分辨率優(yōu)、受環(huán)境光照影響小的特點(diǎn),且無(wú)需深度學(xué)習(xí)算法,可直接
2023-09-19 13:35:01
激光雷達(dá)和與之競(jìng)爭(zhēng)的傳感器技術(shù)(相機(jī)、雷達(dá)和超聲波)加強(qiáng)了對(duì)傳感器融合的需要,也對(duì)認(rèn)真謹(jǐn)慎地選擇光電探測(cè)器、光源和MEMS振鏡提出了更高的要求。 傳感器技術(shù)、成像、雷達(dá)、光探測(cè)技術(shù)及測(cè)距技術(shù)
2018-09-10 14:10:45
本文由回映電子整理分享,歡迎工程老獅們參與學(xué)習(xí)與評(píng)論 毫米波主被動(dòng)復(fù)合探測(cè)系統(tǒng)將毫米波雷達(dá)和輻射計(jì)相結(jié)合,充分利用系統(tǒng)主動(dòng)測(cè)距和目標(biāo)被動(dòng)輻射特性來(lái)完成目標(biāo)識(shí)別及定位,大大改善了毫米波探測(cè)器的性能
2021-12-30 10:36:54
為了提高系統(tǒng)的集成度,同時(shí)兼顧精度,介紹用FPGA延遲線(xiàn)插入法來(lái)實(shí)現(xiàn)較高精度的脈沖激光測(cè)時(shí)、測(cè)距的原理和技術(shù)途徑。FPGA延遲線(xiàn)插入法是在直接計(jì)數(shù)法的基礎(chǔ)上,采用FPGA內(nèi)部延時(shí)單元將時(shí)間間隔轉(zhuǎn)化
2010-05-13 09:04:22
本文由回映電子整理分享,歡迎工程老獅們參與學(xué)習(xí)與評(píng)論; 隨著科技的發(fā)展,實(shí)時(shí)測(cè)距在工業(yè)中發(fā)揮著越來(lái)越大的作用。目前測(cè)距系統(tǒng)主要技術(shù)有激光測(cè)距、超聲波測(cè)距、雷達(dá)測(cè)距等。而其中雷達(dá)測(cè)距由于其獨(dú)有的特點(diǎn)
2021-12-27 17:08:50
文章對(duì)目前汽車(chē)夜間行駛所需的安全系統(tǒng)進(jìn)行設(shè)計(jì)和描述,主要針對(duì)避障和燈光安全問(wèn)題采取措施。主控芯片采用STM32F103,利用微波進(jìn)行測(cè)距,實(shí)現(xiàn)前行障礙物的探測(cè)和警示,用硅光電池實(shí)現(xiàn)夜間遠(yuǎn)近光燈的檢測(cè)與交替,從而提高夜間行車(chē)的安全系數(shù)。
2021-01-05 14:50:11
以 ARM9 處理器為控制核心,采用相位法激光測(cè)距技術(shù),首先用正弦信號(hào)調(diào)制半導(dǎo)體激光器的發(fā)射激光,然后將被測(cè)物反射的激光用光電探測(cè)器轉(zhuǎn)換為電信號(hào),采用相位測(cè)量技術(shù)測(cè)量出發(fā)射信號(hào)與接收信號(hào)的相位差,從而計(jì)算出與被測(cè)物的距離。最后使用實(shí)時(shí)操作系統(tǒng)μC/OS-II 作為系統(tǒng)控制核心,以確保測(cè)量精度。
2019-08-27 08:17:39
跪求基于載波激光雷達(dá)的水下目標(biāo)探測(cè)技術(shù)的資料,要搞畢業(yè)論文。
2011-02-24 21:27:42
生物戰(zhàn)劑爆炸物檢測(cè)方面的研究最新進(jìn)展,并設(shè)計(jì)了一種激光雷達(dá)光譜探測(cè)與實(shí)時(shí)測(cè)量裝置,以傅里葉光學(xué)與光信號(hào)處理為基礎(chǔ),使用楔形標(biāo)準(zhǔn)具作為分光鏡,實(shí)現(xiàn)背景噪聲去除、激光探測(cè)和光譜測(cè)量。測(cè)試結(jié)果表明,可探測(cè)激光
2010-04-23 11:32:54
激光測(cè)距原理是什么?如何實(shí)現(xiàn)激光脈沖測(cè)距雷達(dá)系統(tǒng)?
2021-04-29 06:14:35
如何實(shí)現(xiàn)VL53L0X+stm32激光測(cè)距?
2021-11-26 07:35:12
測(cè)量距離的方法有很多種,短距離的可以用米尺,遠(yuǎn)距離的有激光測(cè)距等,超聲波測(cè)距適用于高精度的中長(zhǎng)距離測(cè)量。因?yàn)槌暡ㄔ跇?biāo)準(zhǔn)空氣中的傳播速度為331.45米/秒,由單片機(jī)負(fù)責(zé)計(jì)時(shí),系統(tǒng)的測(cè)量精度理論上
2022-01-10 08:28:59
哪位大神知道如何用stm32f103開(kāi)發(fā)板+激光測(cè)距模塊tof10120實(shí)現(xiàn)激光測(cè)距?
2021-03-10 07:07:22
據(jù)報(bào)道,激光雷達(dá)(LiDAR)與其它傳感器技術(shù)(攝像頭、雷達(dá)和超聲波)的相互競(jìng)爭(zhēng)增加了對(duì)傳感器融合的需求,同時(shí)也要求對(duì)光電探測(cè)器、光源和MEMS微鏡的仔細(xì)甄選。 隨著傳感器技術(shù)、成像技術(shù)、雷達(dá)
2018-11-08 10:42:36
開(kāi)發(fā)的全自動(dòng)駕駛交通工具都依賴(lài)激光探測(cè)和測(cè)距技術(shù)(激光雷達(dá))來(lái)感知世界并繪制地圖。這些地圖為無(wú)人駕駛汽車(chē)提供重要信息,利用其傳感系統(tǒng)和計(jì)算系統(tǒng)重點(diǎn)關(guān)注汽車(chē)、行人和自行車(chē)等障礙物的信息。然而,激光
2017-10-23 17:51:41
我用的脈沖激光測(cè)距,峰值功率可以達(dá)到70w,脈寬大概100ns左右,測(cè)距范圍100m以?xún)?nèi),請(qǐng)問(wèn)可以用PIN作為光電探測(cè)器接收嗎?后面的TIA放大大約10K-20K倍,另外,這個(gè)是不是對(duì)光學(xué)準(zhǔn)直和接收系統(tǒng)要求很高,方便起見(jiàn),單透鏡可以準(zhǔn)直嗎?
2018-11-19 10:37:22
雷達(dá)測(cè)距防撞控制系統(tǒng)(Distronic,簡(jiǎn)稱(chēng)DTR)屬于汽車(chē)主動(dòng)安全裝置,是當(dāng)前國(guó)際汽車(chē)安全領(lǐng)域研究的熱點(diǎn)之一。主要實(shí)現(xiàn)3個(gè)功能防撞預(yù)警,輔助停車(chē),盲點(diǎn)探測(cè)等。汽車(chē)防碰撞技術(shù)首先需要解決的問(wèn)題是
2017-02-27 19:33:02
0 引言 為提高汽車(chē)的舒適性和安全性,現(xiàn)代汽車(chē)廠家應(yīng)用先進(jìn)的測(cè)距技術(shù),給汽車(chē)安裝了各類(lèi)的雷達(dá)系統(tǒng),使汽車(chē)安全性大大提高,減少事故的發(fā)生,確保行車(chē)安全。 1 超聲波距離測(cè)距 它利用超聲探測(cè)
2012-10-21 11:13:31
自動(dòng)駕駛技術(shù)雖然能讓我們開(kāi)車(chē)更安全更方便,但是目前除了技術(shù)瓶頸之外,成本也是限制這項(xiàng)技術(shù)普及的重要原因之一。不過(guò)現(xiàn)在來(lái)自于Velodyne LIDAR激光雷達(dá)傳感器就能很好的解決成本問(wèn)題,它的造價(jià)只有目前主流激光測(cè)距儀的一小部分,但是卻更容易的能夠與汽車(chē)其它組件進(jìn)行融合。
2020-05-15 06:39:08
最遠(yuǎn)的激光測(cè)距,能夠測(cè)量多遠(yuǎn)的距離?
2015-12-16 07:53:30
激光測(cè)距系統(tǒng),有償求!有償求!有償求!
2017-03-13 09:37:09
互聯(lián)網(wǎng)時(shí)代,傳統(tǒng)汽車(chē)行業(yè)也在不斷突破,求新求變。眼下的汽車(chē)新技術(shù)已經(jīng)不僅僅局限于動(dòng)力系統(tǒng)、車(chē)身地盤(pán)等傳統(tǒng)汽車(chē)工程了,而更加靠接電子技術(shù)和移動(dòng)互聯(lián)網(wǎng),未來(lái)最受矚目的十大汽車(chē)新技術(shù)是什么呢?本文為讀者
2015-10-29 16:21:35
較高,因此非常適合用于泊車(chē)。 激光雷達(dá)激光雷達(dá)是軍轉(zhuǎn)民的高精度雷達(dá)技術(shù)。在汽車(chē)領(lǐng)域的應(yīng)用,主要是用于無(wú)人駕駛系統(tǒng),通常將激光雷達(dá)放置于車(chē)頂或車(chē)身的前后左右,但目前多處于試驗(yàn)階段。激光雷達(dá)是以激光為工作
2019-09-19 09:05:02
求應(yīng)用于汽車(chē)前大燈照明,led或激光技術(shù)
2016-07-28 10:08:04
研究的紅外測(cè)距系統(tǒng)成本較低,機(jī)體尺寸小,而且利用一種新的測(cè)距原理結(jié)合單片機(jī)技術(shù)的處理,使測(cè)量精度有了較大提高;同時(shí)把這種測(cè)距系統(tǒng)應(yīng)用于汽車(chē)防撞系統(tǒng)中,并進(jìn)行了裝車(chē)防撞試驗(yàn)。試驗(yàn)結(jié)果表面,這種系統(tǒng)能探測(cè)
2018-11-05 15:23:36
不好意思,菜雞又來(lái)提問(wèn)了,我想設(shè)計(jì)的系統(tǒng)是激光測(cè)距(飛行時(shí)間測(cè)量),然后用FPGA根據(jù)激光測(cè)距的起始信號(hào)再延時(shí)(測(cè)得的時(shí)間)后輸出一個(gè)脈沖信號(hào)。看重FPGA并行處理特點(diǎn),測(cè)距使用時(shí)差測(cè)量芯片
2017-05-04 15:33:06
通過(guò)對(duì)頻域干涉原理的深入研究,本文提出了一種超快時(shí)間分辨力的脈沖激光頻域干涉技術(shù)。采用該技術(shù)方法可精確同步泵浦-探測(cè)實(shí)驗(yàn)中泵浦脈沖和探測(cè)脈沖的傳輸時(shí)間,其同步精度與脈沖激光器脈寬相當(dāng)。本文詳細(xì)論述了
2010-05-13 09:03:21
是LIDAR,即 Light Detection and Ranging。不過(guò),更準(zhǔn)確的應(yīng)該是"LADAR"這種叫法,即Laser Detection and Ranging,激光探測(cè)和測(cè)距
2018-09-10 14:21:58
激光對(duì)射入侵探測(cè)器技術(shù)優(yōu)勢(shì)都有哪些?
2019-01-28 15:45:22
本帖最后由 gk320830 于 2015-3-5 13:47 編輯
畢設(shè)題目就是DSP激光測(cè)距不過(guò) 單片機(jī)激光測(cè)距也可以的哪位大神可以給予幫助啊 ?怒謝了急求
2014-05-10 16:06:21
的環(huán)境感知系統(tǒng)一般由多個(gè)傳感器組成,包括激光雷達(dá)、毫米波雷達(dá)、攝像頭、GPS 等。其中,攝像頭、毫米波雷達(dá)、激光雷達(dá)是無(wú)人駕駛汽車(chē)中最常用的三種環(huán)境感知解決方案。 攝像頭的優(yōu)點(diǎn)是成本低廉,圖像算法
2017-08-21 14:54:32
本帖最后由 gk320830 于 2015-3-8 23:17 編輯
近年來(lái),國(guó)內(nèi)外酒后駕駛引發(fā)的重大傷亡事故呈愈演愈烈之勢(shì)。除了嚴(yán)格執(zhí)法外,推行汽車(chē)電子預(yù)防酒駕的新技術(shù),也是減少和杜絕酒駕
2012-11-15 16:10:52
本文基于光機(jī)電一體化汽車(chē)自動(dòng)測(cè)距預(yù)警及險(xiǎn)警系統(tǒng)的系統(tǒng)結(jié)構(gòu)和工作原理,探討和研究了基于MPC5200 的激光雷達(dá)汽車(chē)自動(dòng)測(cè)距預(yù)警及險(xiǎn)警系統(tǒng)的結(jié)構(gòu)和設(shè)計(jì),包括硬件結(jié)構(gòu)、
2009-08-28 11:00:27 28
28 激光測(cè)距儀的原理和應(yīng)用
1、激光測(cè)距儀的工作原理是怎樣的? 激光測(cè)距儀一般采用兩種方式來(lái)測(cè)量距離:脈沖法和相位法。
2010-03-02 14:45:559572 激光三角法測(cè)距傳器的
2011-01-07 17:24:1497 在眾多的測(cè)距方法中,激光測(cè)距因其良好的精確度特性而廣泛應(yīng)用在軍事和民用領(lǐng)域。實(shí)現(xiàn)了一種針對(duì)合作目標(biāo)的正弦調(diào)幅激光相位測(cè)距方法,使用CPLD和單片機(jī),利用脈沖填充法提高了測(cè)距精度。此方法設(shè)計(jì)的測(cè)距儀具有系統(tǒng)簡(jiǎn)單、響應(yīng)速度快和精度高等特點(diǎn)。
2016-05-05 11:37:3940 用于智能汽車(chē)的小型LD激光測(cè)距儀涉及到脈沖測(cè)距的實(shí)物測(cè)試。
2016-05-06 15:06:098 一種基于DDS技術(shù)的新型激光測(cè)距系統(tǒng)的設(shè)計(jì)
2017-01-02 19:33:2822 相位法激光測(cè)距的實(shí)現(xiàn),有需要的額可以下來(lái)看看
2017-01-02 19:33:2867 人衛(wèi)激光測(cè)距望遠(yuǎn)鏡系統(tǒng)的指向修正,下來(lái)看看
2017-01-02 19:33:285 用于相位法激光測(cè)距的電路系統(tǒng)設(shè)計(jì)
2017-06-14 15:19:38146 基于單片機(jī)的激光測(cè)距系統(tǒng)設(shè)計(jì)
2017-06-14 14:19:40238 基于TDC-GP2的激光測(cè)距系統(tǒng)設(shè)計(jì)-李玉株
2017-06-14 14:10:22139 摘要: 為實(shí)現(xiàn)高速公路車(chē)輛超寬超高治理工作的自動(dòng)化、智能化,設(shè)計(jì)了一種基于激光脈沖測(cè)距技術(shù)的智能車(chē)輛寬高檢測(cè)系統(tǒng)。系統(tǒng)采用LMS二維激光測(cè)距傳感器,在新型高性能微處理器的控制下,對(duì)車(chē)輛輪廓進(jìn)行高速
2018-01-19 01:52:01444 本論文圍繞高精度激光測(cè)距儀開(kāi)發(fā),夢(mèng)照課題技術(shù)指標(biāo)的基礎(chǔ)上,旨在嘗試解決激光測(cè)距儀精度較低的問(wèn)題,對(duì)相位式激光測(cè)距儀的硬件電路設(shè)計(jì)進(jìn)行了深入地研究和探討。
2018-11-15 15:35:3296 905nm激光光源,配合獨(dú)特的光學(xué)、電學(xué)設(shè)計(jì),實(shí)現(xiàn)穩(wěn)定、精準(zhǔn)、高靈敏和高速的距離測(cè)量的功能。最遠(yuǎn)探測(cè)距離可達(dá)1000米。有著先進(jìn)的技術(shù)優(yōu)勢(shì):????高度集成、外觀精巧??? 獨(dú)特的光學(xué)、結(jié)構(gòu)和電子設(shè)計(jì),外觀
2019-03-24 21:22:26953 激光對(duì)射探測(cè)器的智能光束身份識(shí)別技術(shù)是指----兩個(gè)光束以上的激光對(duì)射探測(cè)器,通過(guò)技術(shù)手段使同一對(duì)激光對(duì)射探測(cè)器的不同光束以不同的編/解碼方式進(jìn)行工作,同一對(duì)激光對(duì)射探測(cè)器在任何探測(cè)距離都不會(huì)形成
2020-07-10 11:10:16374 激光測(cè)距傳感器技術(shù)按照測(cè)程分為絕對(duì)距離測(cè)量法和微位移測(cè)量法。按照測(cè)距方法細(xì)分,絕對(duì)距離測(cè)距法主要脈沖式激光測(cè)距和相位式激光測(cè)距,微位移測(cè)量法主要有三角法激光測(cè)距和干涉法激光測(cè)距。
2019-09-26 09:02:122445 激光對(duì)射探測(cè)器由于激光穿透性強(qiáng),探測(cè)距離遠(yuǎn),誤報(bào)率極低等優(yōu)勢(shì),從面世以來(lái)就一直是重點(diǎn)安全管控場(chǎng)所周界防入侵及特殊檢測(cè)系統(tǒng)的優(yōu)選探測(cè)器;隨著人們對(duì)激光入侵探測(cè)器技術(shù)性能的了解,激光入侵探測(cè)
2020-04-24 15:07:54353 激光測(cè)距傳感器(圖1 DIMETIX激光測(cè)距傳感器)的基本原理是通過(guò)相位測(cè)距技術(shù)來(lái)確定目標(biāo)距離。相位測(cè)距技術(shù)的測(cè)距精度高,但作用距離有限,主要用于高精度大地測(cè)量。
2020-03-14 16:45:007061 激光對(duì)射探測(cè)器由于激光穿透性強(qiáng),探測(cè)距離遠(yuǎn),誤報(bào)率極低等優(yōu)勢(shì),從面世以來(lái)就一直是重點(diǎn)安全管控場(chǎng)所周界防入侵及特殊檢測(cè)系統(tǒng)的優(yōu)選探測(cè)器;隨著人們對(duì)激光入侵探測(cè)器技術(shù)性能的了解,激光入侵探測(cè)
2020-04-24 09:45:42695 維安達(dá)斯智慧型激光入侵探測(cè)器是指----兩個(gè)光束以上的激光對(duì)射探測(cè)器,通過(guò)技術(shù)手段使同一對(duì)激光對(duì)射探測(cè)器的不同光束以不同的編/解碼方式進(jìn)行工作,同一對(duì)激光對(duì)射探測(cè)器在任何探測(cè)距離都不會(huì)形成光束相互
2020-10-09 15:00:48709 
激光測(cè)距是以激光器作為光源進(jìn)行測(cè)距的。根據(jù)激光工作的方式,可以分為連續(xù)激光器和脈沖激光器。氦氖、氬離子、氪鎘等氣體激光器工作于連續(xù)輸出狀態(tài),用于相位式激光測(cè)距;雙異質(zhì)砷化鎵半導(dǎo)體激光器,可用于紅外測(cè)距;紅寶石、釹玻璃等固體激光器,則可用于脈沖式激光測(cè)距。
2021-02-15 09:13:001920 激光測(cè)距儀(Laser rangefinder),是利用調(diào)制激光的某個(gè)參數(shù)實(shí)現(xiàn)對(duì)目標(biāo)的距離測(cè)量的儀器。激光測(cè)距儀測(cè)量范圍為3.5~5000米。
2021-03-08 17:14:4519945 來(lái)源 | 光電資訊 激光雷達(dá)是一種通過(guò)發(fā)射激光束來(lái)檢測(cè)目標(biāo)位置,在進(jìn)行各種處理后獲得目標(biāo)信息的雷達(dá)裝置。激光雷達(dá)系統(tǒng)所采用的技術(shù)手段是光電探測(cè)技術(shù),它是一種主動(dòng)探測(cè)技術(shù),能夠準(zhǔn)確、快速地獲取目標(biāo)
2021-10-08 09:44:395904 
探測(cè)器。 激光作為一種能量高度集中的光源,早期應(yīng)用于航空航天及軍工設(shè)施中;維安達(dá)斯系列激光入侵探測(cè)器采用軍工級(jí)的激光發(fā)射和接收器件作為探測(cè)器的主要部件,使產(chǎn)品在探測(cè)距離,抗干擾,穩(wěn)定性各方面都優(yōu)于傳統(tǒng)的主動(dòng)
2021-11-02 17:44:161339 激光對(duì)射探測(cè)器由于激光穿透性強(qiáng),探測(cè)距離遠(yuǎn),誤報(bào)率極低等優(yōu)勢(shì),從面世以來(lái)就一直是重點(diǎn)安全管控場(chǎng)所周界防入侵及特殊檢測(cè)系統(tǒng)的優(yōu)選探測(cè)器;隨著人們對(duì)激光入侵探測(cè)器技術(shù)性能的了解,激光入侵探測(cè)
2022-03-31 21:22:24463 而對(duì)于自動(dòng)駕駛激光雷達(dá)而言,測(cè)距距離足夠遠(yuǎn)、測(cè)距精度足夠高,是保證自動(dòng)駕駛系統(tǒng)及時(shí)作出判斷的前置條件。前面也提到測(cè)距距離取決于激光器的功率,而測(cè)距精度,則取決于ADC的采樣頻率。
2022-09-06 09:07:562680 激光雷達(dá)的本質(zhì)是一種以激光為輻射源的主動(dòng)探測(cè)器,通過(guò)測(cè)距和測(cè)角來(lái)實(shí)現(xiàn)探測(cè)目的。激光雷達(dá)LiDAR(Light Detection and Ranging)是激光探測(cè)及測(cè)距系統(tǒng)的簡(jiǎn)稱(chēng),另外也稱(chēng) LADAR(Laser Detection and Ranging)。
2022-10-27 11:53:208337 激光測(cè)距技術(shù)在民用、軍事等方面均有廣泛應(yīng)用,遠(yuǎn)距離測(cè)距的需求也日益增加。下圖中給出了超導(dǎo)納米線(xiàn)單光子探測(cè)器應(yīng)用于激光測(cè)距的基本原理圖。
2022-12-05 09:37:422686 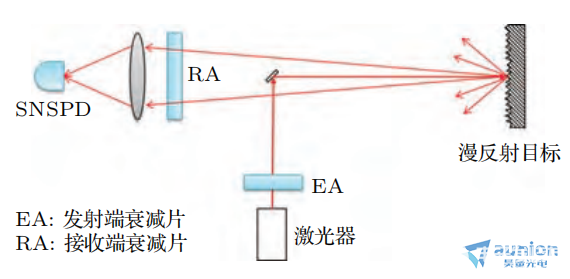
激光測(cè)距是以激光器作為光源進(jìn)行測(cè)距的。根據(jù)激光工作的方式,可以分為連續(xù)激光器和脈沖激光器。氦氖、氬離子、氪鎘等氣體激光器工作于連續(xù)輸出狀態(tài),用于相位式激光測(cè)距;雙異質(zhì)砷化鎵半導(dǎo)體激光器,可用于紅外測(cè)距;紅寶石、釹玻璃等固體激光器,則可用于脈沖式激光測(cè)距。
2023-03-17 10:55:521898 這種方法產(chǎn)生了一種具有低頻噪聲的激光(衡量激光頻率穩(wěn)定程度的標(biāo)準(zhǔn)),同時(shí)能夠實(shí)現(xiàn)快速波長(zhǎng)調(diào)諧——這兩個(gè)方面都是用于光探測(cè)和測(cè)距(激光雷達(dá))應(yīng)用的激光的關(guān)鍵特性。然后,開(kāi)發(fā)人員進(jìn)行了光學(xué)測(cè)距實(shí)驗(yàn),他們使用激光高精度地測(cè)量了距離。
2023-03-24 10:12:11684 LiDAR(激光探測(cè)與測(cè)距) LiDAR是Light Detection And Ranging(激光探測(cè)與測(cè)距)的縮寫(xiě),是使用近紅外光、可見(jiàn)光或紫外光照射對(duì)象物,并通過(guò)光學(xué)傳感器捕獲其反射光來(lái)測(cè)量
2023-04-30 14:41:002327 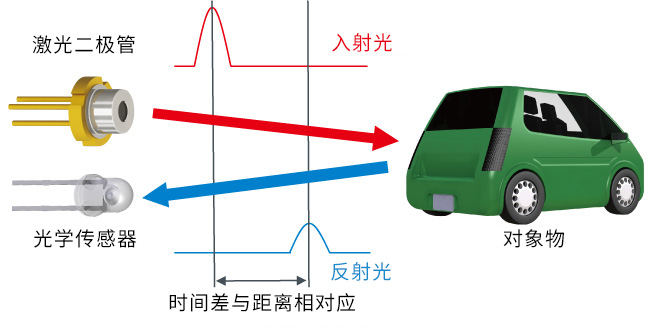
01引言50多年前激光技術(shù)的發(fā)展催生了光探測(cè)和測(cè)距(LIDAR)系統(tǒng),該系統(tǒng)在距離計(jì)算方式上取得了突破。LIDAR的原理與雷達(dá)使用的原理非常相似。主要區(qū)別在于雷達(dá)系統(tǒng)檢測(cè)物體反射的無(wú)線(xiàn)電波
2023-04-13 11:12:28310 
車(chē)載激光探測(cè)與測(cè)距是通過(guò)雷達(dá)用于大范圍定位和測(cè)距,這種系統(tǒng)能在要求的范圍內(nèi),發(fā)射脈沖或連續(xù)激光的激光器和用于反射信號(hào)分析的高速、低噪聲接收器組成。發(fā)射的激光作用在目標(biāo)物體上,并被目標(biāo)物體所改變。根據(jù)
2023-06-29 09:30:10381 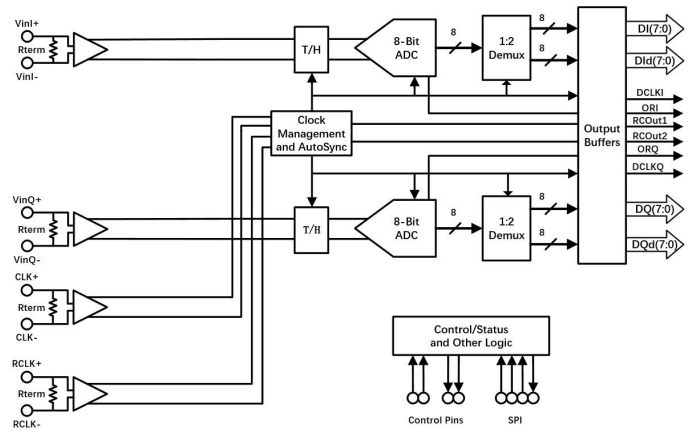
SiLC Eyeonic視覺(jué)傳感器點(diǎn)云圖,展示了超過(guò)2公里的探測(cè)范圍。SiLC基于調(diào)頻連續(xù)波(FMCW)激光雷達(dá)(LiDAR)系統(tǒng)的探測(cè)距離和精度性能,非常適合需要先進(jìn)預(yù)警和詳細(xì)環(huán)境感知的應(yīng)用,例如周界安全和無(wú)人機(jī)探測(cè)等。
2023-12-13 14:35:11198 
激光測(cè)距模塊的工作原理 激光測(cè)距模塊怎么用 激光測(cè)距方法有哪幾種? 激光測(cè)距模塊,也稱(chēng)為激光測(cè)距儀或激光測(cè)距裝置,是一種利用激光技術(shù)測(cè)量目標(biāo)距離的設(shè)備。它通常由激光發(fā)射器、接收器、時(shí)鐘和微處理器
2024-01-03 15:59:13409 激光測(cè)距儀工作原理 晶振在激光測(cè)距儀的作用? 激光測(cè)距儀是一種利用激光技術(shù)測(cè)量物體距離的儀器。它通過(guò)測(cè)量激光脈沖在空氣中傳播的時(shí)間來(lái)計(jì)算出物體到測(cè)距儀的距離。下面將詳細(xì)介紹激光測(cè)距儀的工作原理以及
2024-01-25 16:04:56373 車(chē)載激光探測(cè)與測(cè)距是通過(guò)雷達(dá)用于大范圍定位和測(cè)距,這種系統(tǒng)能在要求的范圍內(nèi),發(fā)射脈沖或連續(xù)激光的激光器和用于反射信號(hào)分析的高速、低噪聲接收器組成。發(fā)射的激光作用在目標(biāo)物體上,并被目標(biāo)物體所改變。根據(jù)
2023-06-21 14:14:02
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論