聚豐項目 > 基于無線充電的四軸無人機
本項目是基于IDT無線充電15W模塊充電模塊與四周F450無人機設計的。通過在無人機機架上搭載無線充電模塊接受端,當檢測到電壓較低時觸發充電請求,控制無人機到達充電發射端附近時,由超聲波模塊進行檢測并降落完成充電。
h1654155747.6186
h1654155747.6186
團隊成員
黃洪加 開發
硬件設計上包括主控模塊,電調,無線遙控接收器,超聲波模塊和無線接收轉換器等。硬件框圖如下圖1所示

圖1
主控模塊可由APM2.8模塊或自助研發的STM32飛控,本項目主要使用自研STM32飛控,主控芯片為STM32F207,主要對無人機進行數據分析及控制,同時對機體電池電量進行采集及判斷。原理圖如下圖2所示。

圖2
超聲波模塊是采用外購的KS103模塊,如圖3所示,測距最大距離8米,盲區為最小1cm之內。測量精度平均3mm,最高達1mm.而且相當靈敏。具有目前其他同類超聲波模塊產品所無法達到的性能優勢和質量保障。測量距離,溫度,光強,三合一功能。適用于機器人準確測距避障,撲火機器人,趨光機器人,四軸飛控定高,工業測距,身高體重儀測量身高,以及安防等領域。本作品是利用模塊定高功能的同時也給無線充電作為引導充電指示,對于飛控上的接口如圖4所示。

圖3

圖4
供電系統分為12V轉5V,12V轉3.3V,皆采用開關電源進行穩壓給各項子功能電路使用,如圖5所示

圖5
在機體上,需要對無線充電電池電壓進行檢測并判斷,所以板子上了一個檢測和判斷電路,如圖6所示

圖6
軟件使用了MDK4.74平臺對STM32F207進行開發和代碼編譯下載,手機使用自開發APP與藍牙模塊進行通信,相關文檔資料和程序代碼會以附錄的形式上傳。
在實際調試過程中我們發現不同的姿態解算,數據融合方法對飛行器的穩定性的影響很大,我們使用了Mahony四元數解算。四軸姿態的表示可以用歐拉角,也可以用四元數。姿態檢測算法作用就是將加速度計、陀螺儀,磁力計的測量值解算成姿態,進而作為系統的反饋量。在獲取傳感器值之前需要對數據進行濾波,濾波算法主要是將獲取到的陀螺儀和加速度計的數據進行去噪聲及融合,得出正確的角度數據(歐拉角或四元數),主要采用互補濾波或者卡爾曼濾波。
無線充電是通過主控判斷電池電量低于設定值之后提醒飛控手后飛到地面充電發射端附近,通過檢測地面超聲波發射器的位置進行左右對準后下降充電。

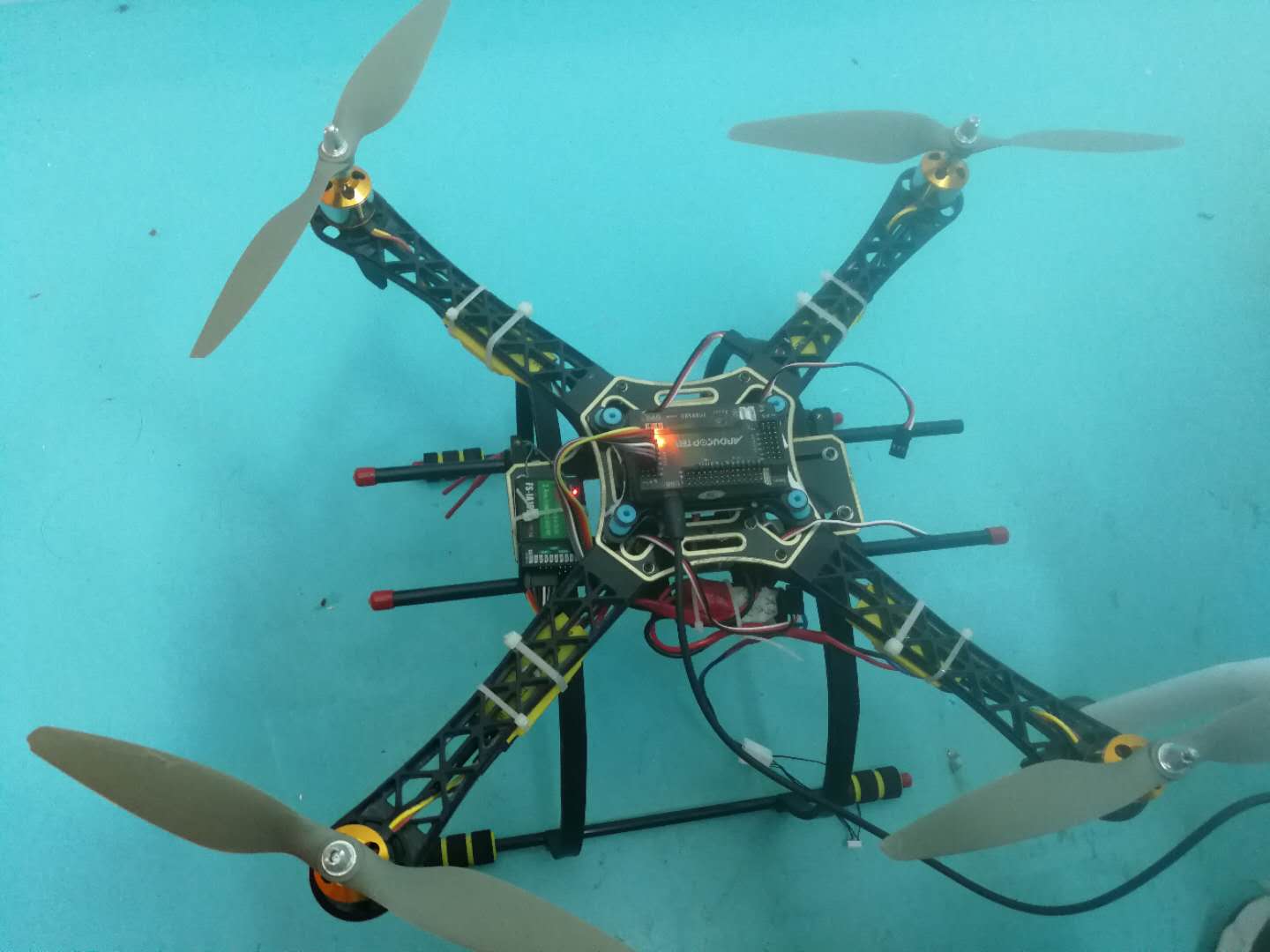
無人機整體實物圖

無人機運行工作圖

無線充電模塊安裝圖
(6.76 MB)下載
 工商網監
工商網監