聚豐項目 > 智能紅外跟隨小車
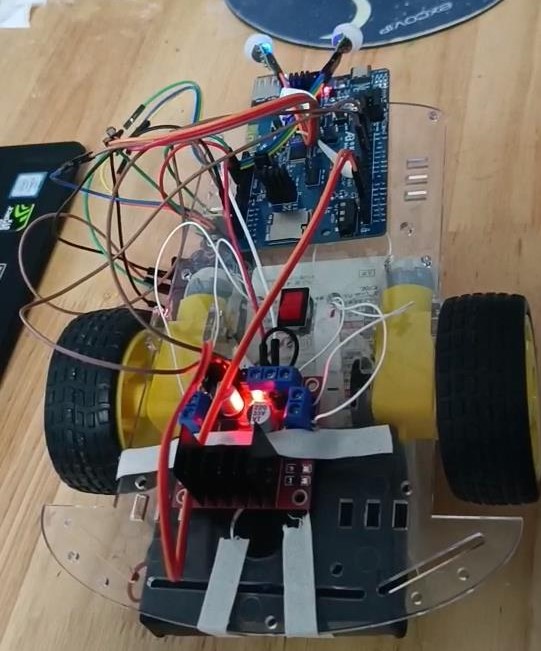
本項目基于AB32VG1開發板,開發能夠自動跟隨人運動的智能紅外跟隨小車。 主要功能如下:1、基于紅外傳感器探測前方人前進、左右移動趨勢;2、基于 紅外探測結果,控制小車自動前進、左右移動。
![]() 圣騎士aabb
圣騎士aabb
![]() 圣騎士aabb
圣騎士aabb
團隊成員
圣騎士aabb 工程師
本項目基于AB32VG1開發板,使用HC-SR505迷你人體感應模塊、L298N小車驅動 模塊實現對人體移動趨勢探測和控制小車移動功能。
1、人體感應探測:PE.6和PE.7實現接收人體感應模塊的探測結果。
2、小車運動控制:PA.1、PA.2、PA.5、PF.1實現控制小車前進、左右移動。
3、紅外接收命令控制:使用AB32VG1自帶的紅外配置,在RT-Thread Settings下使能硬件下的Enable IRRX即可。

本項目軟件基于RT-Thread Studio軟件實現,項目中主要由兩個任務:人體感應探 測任務和小車運動控制任務構成。

1、人體感應探測任務:獲得兩個紅外探測傳感器輸入值。
rt_thread_create("detect", DetectThreeDirection, RT_NULL, 1024, 15, 20);
2、小車運動控制任務:根據紅外輸入和距離輸入,確定是向前方移動或左右移動。
rt_thread_create("car", ControlCarMove, RT_NULL, 1024, 15, 20);
3、距離探測任務:獲得距離傳感器輸入值。
rt_thread_create("distance", DistanceTest, RT_NULL, 1024, 15, 20);
該項目演示效果如下,當紅外探測到正前方時前進。當左右探測時,則隨之左右移動。
(11.06 MB)下載
 工商網監
工商網監