 電子發燒友App
電子發燒友App


lwIP是瑞士計算機科學院(Swedish Institute of Computer Science)的Adam Dunkels等開發的一套用于嵌入式系統的開放源代碼TCP/IP協議棧。Lwip既可以移植到操作系統上,又可以在無操作系統的情況下獨立運行。
1、LwIP的特性
(2) 支持ICMP協議
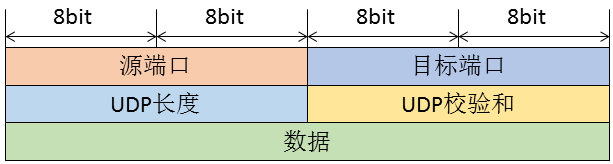
(3) 包括實驗性擴展的的UDP(用戶數據報協議)
(4) 包括阻塞控制,RTT估算和快速恢復和快速轉發的TCP(傳輸控制協議)
(5) 提供專門的內部回調接口(Raw API)用于提高應用程序性能
(6) 可選擇的Berkeley接口API(多線程情況下)
(7) 在最新的版本中支持ppp
(8) 新版本中增加了的IP fragment的支持。
(9) 支持DHCP協議,動態分配ip地址。
2 Lwip在ucos上的移植。
2.1 系統初始化
sys_int必須在tcpip協議棧任務tcpip_thread創建前被調用。
#define MAX_QUEUES 20
#define MAX_QUEUE_ENTRIES 20
typedef struct {
OS_EVENT* pQ;//ucos中指向事件控制塊的指針
void* pvQEntries[MAX_QUEUE_ENTRIES];//消息隊列
//MAX_QUEUE_ENTRIES消息隊列中最多消息數
} TQ_DESCR, *PQ_DESCR;
typedef PQ_DESCR sys_mbox_t;//可見lwip中的mbox其實是ucos的消息隊列
static char pcQueueMemoryPool[MAX_QUEUES * sizeof(TQ_DESCR) ];
void sys_init(void)
{
u8_t i;
s8_t ucErr;
pQueueMem = OSMemCreate( (void*)pcQueueMemoryPool, MAX_QUEUES, sizeof(TQ_DESCR), &ucErr );//為消息隊列創建內存分區
//init lwip task prio offset
curr_prio_offset = 0;
//init lwip_timeouts for every lwip task
//初始化lwip定時事件表,具體實現參考下面章節
for(i=0;i《LWIP_TASK_MAX;i++){
lwip_timeouts[i].next = NULL;
}
}
2.2 創建一個和tcp/ip相關新進程
lwip中的進程就是ucos中的任務,創建一個新進程的代碼如下:
#define LWIP_STK_SIZE 10*1024//和tcp/ip相關任務的堆棧大小。可以根據情況自
//一點也沒有關系:)
//max number of lwip tasks
#define LWIP_TASK_MAX 5 //和tcp/ip相關的任務最多數目
//first prio of lwip tasks
#define LWIP_START_PRIO 5 //和tcp/ip相關任務的起始優先級,在本例中優先級可
//以從(5-9)。注意tcpip_thread在所有tcp/ip相關進程中//應該是優先級最高的。在本例中就是優先級5
//如果用戶需要創建和tcp/ip無關任務,如uart任務等,
//不要使用5-9的優先級
OS_STK LWIP_TASK_STK[LWIP_TASK_MAX][LWIP_STK_SIZE];//和tcp/ip相關進程
//的堆棧區
u8_t curr_prio_offset ;
sys_thread_t sys_thread_new(void (* function)(void *arg), void *arg,int prio)
{
if(curr_prio_offset 《 LWIP_TASK_MAX){
OSTaskCreate(function,(void*)0x1111, &LWIP_TASK_STK[curr_prio_offset][LWIP_STK_SIZE-1],
LWIP_START_PRIO+curr_prio_offset );
curr_prio_offset++;
return 1;
} else {
// PRINT(“ lwip task prio out of range ! error! ”);
}
}
從代碼中可以看出tcpip_thread應該是最先創建的。
2.3 Lwip中的定時事件
在tcp/ip協議中很多時候都要用到定時,定時的實現也是tcp/ip協議棧中一個重要的部分.lwip中定時事件的數據結構如下。
struct sys_timeout {
struct sys_timeout *next;//指向下一個定時結構
u32_t time;//定時時間
sys_timeout_handler h;//定時時間到后執行的函數
void *arg;//定時時間到后執行函數的參數。
};
struct sys_timeouts {
struct sys_timeout *next;
};
struct sys_timeouts lwip_timeouts[LWIP_TASK_MAX];
Lwip中的定時事件表的結構如下圖,每個和tcp/ip相關的任務的一系列定時事件組成一個單向鏈表。每個鏈表的起始指針存在lwip_timeouts的對應表項中。
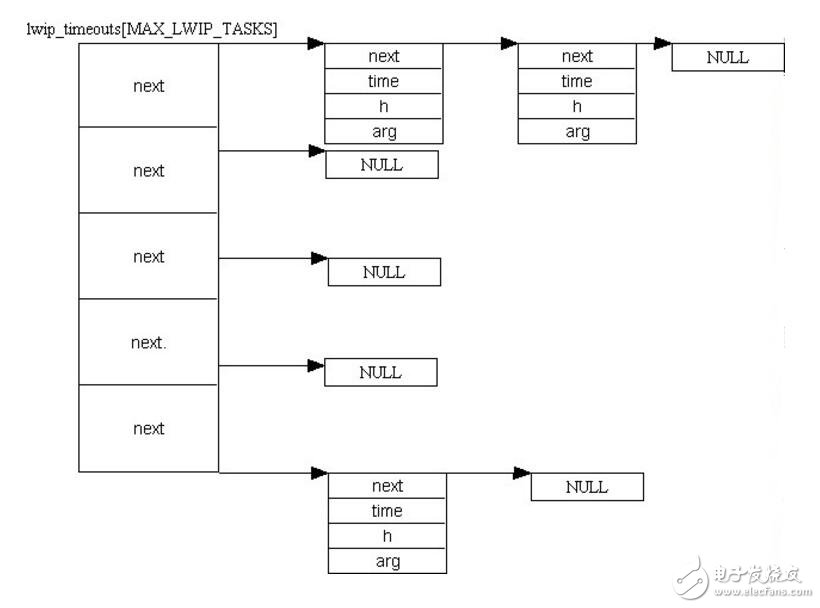
函數sys_arch_timeouts返回對應于當前任務的指向定時事件鏈表的起始指針。該指針存在lwip_timeouts[MAX_LWIP_TASKS]中。
struct sys_timeouts null_timeouts;
struct sys_timeouts * sys_arch_timeouts(void)
{
u8_t curr_prio;
s16_t err,offset;
OS_TCB curr_task_pcb;
null_timeouts.next = NULL;
//獲取當前任務的優先級
err = OSTaskQuery(OS_PRIO_SELF,&curr_task_pcb);
curr_prio = curr_task_pcb.OSTCBPrio;
offset = curr_prio - LWIP_START_PRIO;
//判斷當前任務優先級是不是tcp/ip相關任務,優先級5-9
if(offset 《 0 || offset 》= LWIP_TASK_MAX)
{
return &null_timeouts;
}
return &lwip_timeouts[offset];
}
注意:楊曄大俠移植的代碼在本函數有一個bug.楊曄大俠的移植把上面函數中的OS_TCB curr_task_tcb定義成了全局變量,使本函數成為了一個不可重入函數。我也是在進行如下測試時發現了這個bug.我的開發板上設置的ip地址是192.168.1.95.我在windows的dos窗口內運行
ping 192.168.1.95 –l 2000 –t,不間斷用長度為2000的數據報進行ping測試,同時使用tftp客戶端軟件給192.168.1.95下載一個十幾兆程序,同時再使用telnet連接192.168.1.95端口7(echo端口),往該端口寫數測試echo功能。
在運行一段時間以后,開發板進入不再響應。我當時也是經過長時間的分析才發現是因為在低優先級任務運行ys_arch_timeouts()時被高優先級任務打斷改寫了curr_task_tcb的值,從而使sys_arch_timeouts返回的指針錯誤,進而導致系統死鎖。函數sys_timeout給當前任務增加一個定時事件:
void sys_timeout(u32_t msecs, sys_timeout_handler h, void *arg)
{
struct sys_timeouts *timeouts;
struct sys_timeout *timeout, *t;
timeout = memp_malloc(MEMP_SYS_TIMEOUT);//為定時事件分配內存
if (timeout == NULL) {
return;
}
timeout-》next = NULL;
timeout-》h = h;
timeout-》arg = arg;
timeout-》time = msecs;
timeouts = sys_arch_timeouts();//返回當前任務定時事件鏈表起始指針
if (timeouts-》next == NULL) {//如果鏈表為空直接增加該定時事件
timeouts-》next = timeout;
return;
}
//如果鏈表不為空,對定時事件進行排序。注意定時事件中的time存儲的是本事件
//時間相對于前一事件的時間的差值
if (timeouts-》next-》time 》 msecs) {
timeouts-》next-》time -= msecs;
timeout-》next = timeouts-》next;
timeouts-》next = timeout;
} else {
for(t = timeouts-》next; t != NULL; t = t-》next) {
timeout-》time -= t-》time;
if (t-》next == NULL ||
t-》next-》time 》 timeout-》time) {
if (t-》next != NULL) {
t-》next-》time -= timeout-》time;
}
timeout-》next = t-》next;
t-》next = timeout;
break;
}
}
}
}
函數sys_untimeout從當前任務定時事件鏈表中刪除一個定時事件
void sys_untimeout(sys_timeout_handler h, void *arg)
{
struct sys_timeouts *timeouts;
struct sys_timeout *prev_t, *t;
timeouts = sys_arch_timeouts();//返回當前任務定時事件鏈表起始指針
if (timeouts-》next == NULL)//如果鏈表為空直接返回
{
return;
}
//查找對應定時事件并從鏈表中刪除。
for (t = timeouts-》next, prev_t = NULL; t != NULL; prev_t = t, t = t-》next)
{
if ((t-》h == h) && (t-》arg == arg))
{
/* We have a match */
/* Unlink from previous in list */
if (prev_t == NULL)
timeouts-》next = t-》next;
else
prev_t-》next = t-》next;
/* If not the last one, add time of this one back to next */
if (t-》next != NULL)
t-》next-》time += t-》time;
memp_free(MEMP_SYS_TIMEOUT, t);
return;
}
}
return;
}
2.2.3 “mbox”的實現:
(1)mbox的創建
sys_mbox_t sys_mbox_new(void)
{
u8_t ucErr;
PQ_DESCR pQDesc;
//從消息隊列內存分區中得到一個內存塊
pQDesc = OSMemGet( pQueueMem, &ucErr );
if( ucErr == OS_NO_ERR ) {
//創建一個消息隊列
pQDesc-》pQ=OSQCreate(&(pQDesc-》pvQEntries[0]), MAX_QUEUE_ENTRIES );
if( pQDesc-》pQ != NULL ) {
return pQDesc;
}
}
return SYS_MBOX_NULL;
}
(2)發一條消息給”mbox”
const void * const pvNullPointer = 0xffffffff;
void sys_mbox_post(sys_mbox_t mbox, void *data)
{
INT8U err;
if( !data )
data = (void*)&pvNullPointer;
err= OSQPost( mbox-》pQ, data);
}
在ucos中,如果OSQPost (OS_EVENT *pevent, void *msg)中的msg==NULL 會返回一條OS_ERR_POST_NULL_PTR錯誤。而在lwip中會調用sys_mbox_post(mbox,NULL)發送一條空消息,我們在本函數中把NULL變成一個常量指針0xffffffff.
(3)從”mbox”中讀取一條消息
#define SYS_ARCH_TIMEOUT 0xffffffff
void sys_mbox_fetch(sys_mbox_t mbox, void **msg)
{
u32_t time;
struct sys_timeouts *timeouts;
struct sys_timeout *tmptimeout;
sys_timeout_handler h;
void *arg;
again:
timeouts = sys_arch_timeouts();////返回當前任務定時事件鏈表起始指針
if (!timeouts || !timeouts-》next) {//如果定時事件鏈表為空
sys_arch_mbox_fetch(mbox, msg, 0);//無超時等待消息
} else {
if (timeouts-》next-》time 》 0) {
//如果超時事件鏈表不為空,而且第一個超時事件的time !=0
//帶超時等待消息隊列,超時時間等于超時事件鏈表中第一個超時事件的time,
time = sys_arch_mbox_fetch(mbox, msg, timeouts-》next-》time);
//在后面分析中可以看到sys_arch_mbox_fetch調用了ucos中的OSQPend系統調
//用從消息隊列中讀取消息。
//如果”mbox”消息隊列不為空,任務立刻返回,否則任務進入阻塞態。
//需要重點說明的是sys_arch_mbox_fetch的返回值time:如果sys_arch_mbox_fetch
//因為超時返回,time=SYS_ARCH_TIMEOUT,
//如果sys_arch_mbox_fetch因為收到消息而返回,
//time = 收到消息時刻的時間-執行sys_arch_mbox_fetch時刻的時間,單位是毫秒
//由于在ucos中任務調用OSQPend系統調用進入阻塞態,到收到消息重新開始執行
//這段時間沒有記錄下來,所以我們要簡單修改ucos的源代碼。(后面我們會看到)。
} else {
//如果定時事件鏈表不為空,而且第一個定時事件的time ==0,表示該事件的定時
//時間到
time = SYS_ARCH_TIMEOUT;
}
if (time == SYS_ARCH_TIMEOUT) {
//一個定時事件的定時時間到
tmptimeout = timeouts-》next;
timeouts-》next = tmptimeout-》next;
h = tmptimeout-》h;
arg = tmptimeout-》arg;
memp_free(MEMP_SYS_TIMEOUT, tmptimeout);
//從內存中釋放該定時事件,并執行該定時事件中的函數
if (h != NULL) {
h(arg);
}
//因為定時事件中的定時時間到或者是因為sys_arch_mbo_fetch超時到而執行到
//這里,返回本函數開頭重新等待mbox的消息
goto again;
} else {
//如果sys_arch_mbox_fetch無超時收到消息返回
//則刷新定時事件鏈表中定時事件的time值。
if (time 《= timeouts-》next-》time) {
timeouts-》next-》time -= time;
} else {
timeouts-》next-》time = 0;
}
}
}
}
u32_t sys_arch_mbox_fetch(sys_mbox_t mbox, void **data, u32_t timeout)
{
u32_t ucErr;
u16_t ucos_timeout;
//在 lwip中 ,timeout的單位是ms
// 在ucosII ,timeout 的單位是timer tick
ucos_timeout = 0;
if(timeout != 0){
ucos_timeout = (timeout )*( OS_TICKS_PER_SEC/1000);
if(ucos_timeout 《 1)
ucos_timeout = 1;
else if(ucos_timeout 》 65535)
ucos_timeout = 65535;
}
//如果data!=NULL就返回消息指針,
if(data != NULL){
*data = OSQPend( mbox-》pQ, (u16_t)ucos_timeout, &ucErr );
}else{
OSQPend(mbox-》pQ,(u16_t)ucos_timeout,&ucErr);
}
//這里修改了ucos中的OSQPend系統調用,
//原來的void *OSQPend (OS_EVENT *pevent, INT16U timeout, INT8U *err)
// err的返回值只有兩種:收到消息就返回OS_NO_ERR,超時則返回OS_TIMEOUT
//這里先將err從8位數據改變成了16位數據 OSQPend(*pevent,timeout, INT16U *err)
//重新定義了OS_TIMEOUT
//在ucos中原有#define OS_TIMEOUT 20
//改為 #define OS_TIMEOUT -1
//err返回值的意義也改變了,如果超時返回OS_TIMEOUT
// 如果收到消息,則返回OSTCBCur-》OSTCBDly修改部分代碼如下
//if (msg != (void *)0) { /* Did we get a message? */
// OSTCBCur-》OSTCBMsg = (void *)0;
// OSTCBCur-》OSTCBStat = OS_STAT_RDY;
// OSTCBCur-》OSTCBEventPtr = (OS_EVENT *)0;
// *err = OSTCBCur-》OSTCBDly;// zhangzs @2003.12.12
// OS_EXIT_CRITICAL();
// return (msg); /* Return message received */
// }
//關于ucos的OSTBCur-》OSTCBDly的含義請查閱ucos的書籍
if( ucErr == OS_TIMEOUT ) {
timeout = SYS_ARCH_TIMEOUT;
} else {
if(*data == (void*)&pvNullPointer )
*data = NULL;
//單位轉換,從ucos tick-》ms
timeout = (ucos_timeout -ucErr)*(1000/ OS_TICKS_PER_SEC);
}
return timeout;
}
semaphone的實現和mbox類似,這里就不再重復了.
3、LwIP移植心得
平臺是LPC2136+ENC28J60,32K的RAM,軟件是uCOS-II 2.51+LwIP 1.1.1。
感覺主要解決兩個問題:
操作系統仿真層的移植。這個基于uCOS-II的代碼太多了。COPY下就行!
1)設備驅動的移植
驅動的移植主要就是完成ethernetif.c的工作。作者已經給好了驅動的接口。
struct netif {
struct netif *next;
struct ip_addr ip_addr;
struct ip_addr netmask;
struct ip_addr gw;
err_t (* input)(struct pbuf *p, struct netif *inp);
err_t (* output)(struct netif *netif, struct pbuf *p,
struct ip_addr *ipaddr);
err_t (* linkoutput)(struct netif *netif, struct pbuf *p);
void *state;
#if LWIP_DHCP
struct dhcp *dhcp;
#endif
unsigned char hwaddr_len;
unsigned char hwaddr[NETIF_MAX_HWADDR_LEN];
u16_t mtu;
char name[2];
u8_t num;
u8_t flags;
};
主要就是:
err_t (* input)(struct pbuf *p, struct netif *inp);
這個是被驅動調用的,傳遞一個數據包給TCP/IP棧。
err_t (* output)(struct netif *netif, struct pbuf *p,struct ip_addr *ipaddr);
這個是被IP模塊調用的,向以太網上發送一個數據包,函數要先通過IP地址獲得解決硬件地址,然后發包。
err_t (* linkoutput)(struct netif *netif, struct pbuf *p);
這個是直接發送數據包的接口。
相應的作者在ethernetif.c里面給了幾個函數框架,這個文件相當于一個硬件抽象層。
static void low_level_init(struct netif *netif)
網卡初始化函數
static err_t low_level_output(struct netif *netif, struct pbuf *p)
鏈路層發送函數,實現err_t (* linkoutput)接口。
static struct pbuf *low_level_input(struct netif *netif)
得到一整幀數據
static err_t ethernetif_output(struct netif *netif, struct pbuf *p,struct ip_addr *ipaddr)
實現發送線程,實現err_t (* output)接口。
static void ethernetif_input(struct netif *netif)
實現接收線程,識別數據包是ARP包還是IP包
err_t ethernetif_init(struct netif *netif)
初始化底層接口,給作者給好了驅動的接口賦值啊啥的。
其實,寫驅動的時候只要自己再建個ethernet.c,實際的網絡硬件控制的文件
然后提供幾個函數
比如:
void EMACInit( void )
硬件的初始化
void EMACPacketSend ( u8_t *buffer, u16_t length )
用來將buffer里面的包復制到網絡設備的發送緩沖里面,發送。
u16_t EMACPacketReceive ( u8_t *buffer, u16_t max_length )
用來將網絡設備的接收緩沖里面的包數據復制到buffer里面。
u16_t EMACPacketLength ( u16_t max_length )
獲得包長度
還有其他控制類函數。
最后,用ethernet.c里的函數完成ethernetif.c里的框架。這樣脈絡可能會清楚一點。
2)應用層的那邊問題
(1).lwip提供三種API:1)RAW API 2)lwip API 3)BSD API。
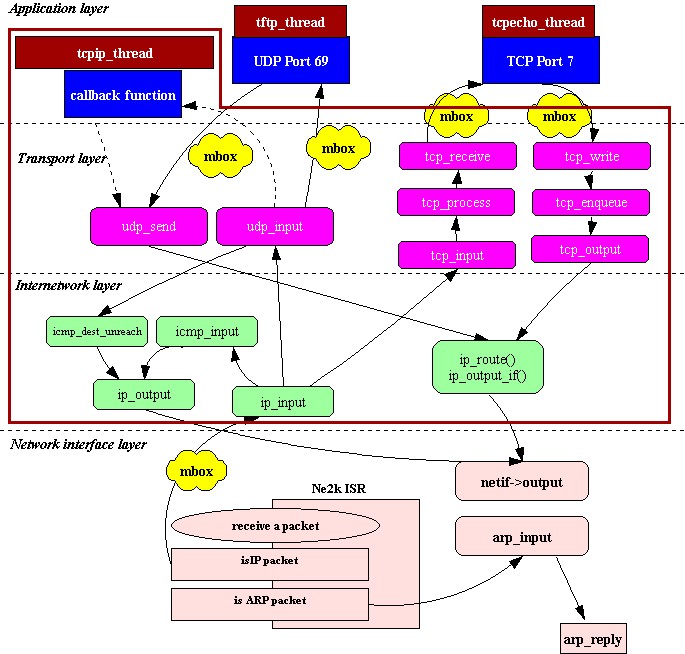
對于多任務系統而言,因為lwip采用的是將TCP/IP協議放在一個單獨的線程里面,所以那個線程是tcpip_thread。采用RAW API回調技術,就得把應用層程序寫在tcpip_thread這個線程里面,作為同一個任務運行。
而采用lwip API,就可以將TCP/IP協議和應用層程序放在不同的任務里面,通過調api_lib.c提供的函數,編寫相應的應用層代碼。好象一般都會采用這種方式。
BSD API就是那sockets.c里面的,沒用過。
(2)任務間是如何調度的
從底層到應用層,一般將底層數據接收做為一個線程,可以建個任務也可以直接在中斷里解決。
然后tcpip_thread是一個線程,最后是應用層一個線程。
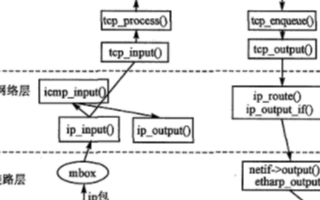
底層的郵箱投遞活動是通過調用tcpip.c里的tcpip_input。這個函數向tcpip_thread投遞消息。高層的投遞應該是通過tcpip_apimsg。
遇到的問題:
一開始移植的時候,驅動寫好的,能PING通,但TCP的任務沒反應,這個我那問題是lwip協議棧的問題,換個版本的協議棧就搞定了,網上吧,下的協議棧,有的是有問題的。












 工商網監
工商網監
評論