 電子發(fā)燒友App
電子發(fā)燒友App


S7-200 SMART作為S7-200的升級款,在很多方面都進行了優(yōu)化,使用更加的方便。其中運動控制的優(yōu)化最為突出,S7-200運動控制頻率低,編程比較麻煩,優(yōu)化后提供了很完善的向?qū)ЫM態(tài),只需要按照步驟將向?qū)ЫM態(tài)好,系統(tǒng)會自動生成各個功能的子程序,然后根據(jù)工藝要求調(diào)用相應的子程序編程,使程序的編寫大為的簡化,本文就詳細的介紹運動向?qū)У慕M態(tài)。
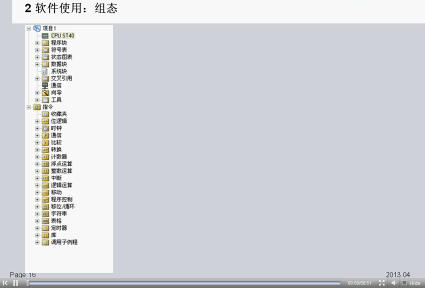
在項目樹中找到向?qū)?運動,向?qū)ЫM態(tài)步驟如下圖所示:


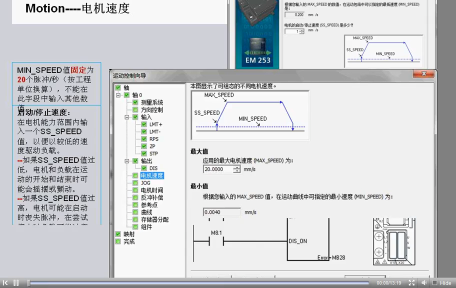
選擇工程單位則需要設置正確的運動參數(shù),系統(tǒng)會根據(jù)設定的參數(shù)自動將距離和速度換算成脈沖數(shù)和脈沖頻率,所以設定的距離和速度都是浮點數(shù)。這種模式編程簡單,但是余數(shù)處理不夠靈活。
選擇相對脈沖則系統(tǒng)只能按照設定的脈沖數(shù)和脈沖頻率進行發(fā)脈沖,設定值為雙整數(shù)。需要自己編寫程序?qū)⒃O定距離和速度換算成脈沖和脈沖頻率,編程較為麻煩,但余數(shù)處理比較靈活。本文以相對脈沖模式為例。

?















至此向?qū)ЫM態(tài)完成,點擊生成即可自動生成所需的運動子程序,后續(xù)只要調(diào)用相應的子程序編程即可。
注:上圖中未說明的步驟為使用較少的功能,可直接跳過。
?
生成后打開項目樹>指令>調(diào)用子程序,如下圖:

AXIS0_CTRL:運動軸初始化。
AXIS0_MAN:手動子例程。
AXIS0_GOTO:單段定量子例程。(可設置為相對或絕對)
AXIS0_RUN:多段定量曲線子例程。調(diào)用向?qū)е薪M態(tài)的曲線運動。
AXIS0_RSEEK:搜尋參考點子例程。按照向?qū)е薪M態(tài)的搜尋速度和搜尋模式搜尋RPS建立參考點。
AXIS0_LDPOS:修改當前位置子例程,可以為運動建立一個虛擬的參考點。
AXIS0_SRATE:修改加減速及急停時間子例程。
AXIS0_CFG:重新加載組態(tài)子例程。修改向?qū)?shù)據(jù)塊中數(shù)值后都要用CFG進行刷新才生效。
其它子例程應用較少,此處就不作介紹。
此文章為工控幫原創(chuàng),轉(zhuǎn)載需注明



























 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論