當(dāng)VI中含有 NI SoftMotion中的運(yùn)動(dòng)函數(shù)模塊如Straight Line Move函數(shù)時(shí),生成應(yīng)用程序時(shí)總出錯(cuò),這是怎么回事
2014-09-02 21:04:23
關(guān)于運(yùn)動(dòng)控制,可以選用NI的硬件和硬件驅(qū)動(dòng),開發(fā)時(shí)間比較短,但是成本較高。另外運(yùn)動(dòng)控制還可以使用PLC和運(yùn)動(dòng)控制卡,我現(xiàn)在使用的是PCI的運(yùn)動(dòng)控制卡,市場(chǎng)上很多,大多數(shù)會(huì)提供驅(qū)動(dòng),支持VC、VB等等
2015-02-10 11:30:19
LabVIEW開發(fā)六軸工業(yè)機(jī)器人運(yùn)動(dòng)控制系統(tǒng)
本項(xiàng)目開發(fā)了一個(gè)高效的工業(yè)機(jī)器人控制系統(tǒng),重點(diǎn)關(guān)注于運(yùn)動(dòng)學(xué)算法和軌跡規(guī)劃算法的實(shí)現(xiàn)和測(cè)試。LabVIEW作為一個(gè)關(guān)鍵技術(shù),在項(xiàng)目中扮演了核心角色
2023-12-21 20:03:18
運(yùn)用NI LabVIEW Softmotion實(shí)現(xiàn)對(duì)SolidWorks中的模型進(jìn)行運(yùn)動(dòng)控制時(shí),總是報(bào)錯(cuò),運(yùn)用把NI自帶的例程進(jìn)行運(yùn)動(dòng)仿真時(shí)同樣報(bào)錯(cuò),圖片如下。求高人指點(diǎn)……
2015-04-01 21:02:55
通過使用NI的Softmotion模塊來仿真具有實(shí)際運(yùn)動(dòng)意義的運(yùn)動(dòng)系統(tǒng),在構(gòu)建實(shí)際物理模型和連接至實(shí)際的控制算法之前,可以進(jìn)行機(jī)械動(dòng)力學(xué)的仿真,包括質(zhì)量和摩擦的影響,循環(huán)時(shí)間,以及組成系統(tǒng)的單個(gè)
2016-09-14 18:42:18
how to programmatically reinitialize the NI SoftMotion Module.求大佬指點(diǎn)!
2020-08-22 10:54:04
機(jī)器人和視覺方面的:NI SoftMotion:完全可重配置運(yùn)動(dòng)控制系統(tǒng)的優(yōu)勢(shì)3D視覺:第三維度的重要性NI LabVIEW中實(shí)現(xiàn)3D視覺的工具和技術(shù)機(jī)器監(jiān)測(cè):通過性能測(cè)量,最大限度提高生產(chǎn)質(zhì)量通過
2013-12-04 23:05:21
Labview softmotion 控制solidworks聯(lián)合仿真試驗(yàn),用的自帶例子(Basic Straight-Line Move),可以正常部署;但是運(yùn)行自帶的VI卻不能使電機(jī)旋轉(zhuǎn)。Labview 2011 32位Solidworks 2013 64位
2015-07-09 16:09:15
各位大俠,求助呀~運(yùn)動(dòng)控制卡采用的是ni公司PCI-7350,用labview編寫運(yùn)動(dòng)控制系統(tǒng)。以前沒有編寫過大型的系統(tǒng),沒什么經(jīng)驗(yàn),大俠們有沒有相關(guān)的資料,特別是編寫的相關(guān)的例子。單軸,雙軸,三軸的就行了~~~求救呀~~~{:4:}
2013-03-12 16:07:11
運(yùn)動(dòng)控制系統(tǒng)
2013-08-15 09:37:04
運(yùn)動(dòng)控制系統(tǒng)由什么組成?
2021-11-01 06:33:31
目錄前言運(yùn)動(dòng)控制系統(tǒng)的基本方程前言本篇文章主要參考資料為:電力拖動(dòng)自動(dòng)控制系統(tǒng)——運(yùn)動(dòng)控制系統(tǒng)(第五版) 阮毅 楊影 陳伯時(shí)工業(yè)運(yùn)動(dòng)控制——電機(jī)選擇,驅(qū)動(dòng)器和控制器應(yīng)用 Hakan Gurocak
2021-09-15 07:57:19
1.運(yùn)動(dòng)控制系統(tǒng)組成1)人機(jī)接口2)運(yùn)動(dòng)控制器3)驅(qū)動(dòng)器4)執(zhí)行器5)傳動(dòng)機(jī)構(gòu)6)反饋2.運(yùn)動(dòng)曲線1)梯形速度曲線梯形曲線比較簡(jiǎn)單,但是梯形尖角會(huì)導(dǎo)致加速度不連續(xù),對(duì)系統(tǒng)產(chǎn)生極大的沖擊。2)S型速度
2021-09-01 07:52:50
運(yùn)動(dòng)控制系統(tǒng)(陳伯時(shí))
2020-04-02 11:05:13
LED點(diǎn)陣顯示控制系統(tǒng)結(jié)構(gòu)及工作原理是什么基于CPLD的LED點(diǎn)陣顯示控制器介紹
2021-04-30 07:17:35
基于labview的運(yùn)動(dòng)控制系統(tǒng)
2013-04-05 20:18:35
作者:MiTu_-_課程:運(yùn)動(dòng)控制系統(tǒng)參考書目:《自動(dòng)控制系統(tǒng)》第二版 北京郵電大學(xué)任彥碩 趙一丁運(yùn)動(dòng)控制系統(tǒng)一、課后習(xí)題二、直流調(diào)速三、變流調(diào)速四、簡(jiǎn)答一、課后習(xí)題U1 緒論自動(dòng)控制系統(tǒng)結(jié)構(gòu)七個(gè)
2021-06-30 06:56:58
0. 介紹下圖展示了一個(gè)基于Platinum Maestro的運(yùn)動(dòng)控制系統(tǒng)的軟件結(jié)構(gòu)。Note:另外兩個(gè)軟件模塊,不包括在上面的圖表中,與白金大師一起使用。這些是KPA Studio和用于TCP
2021-09-14 09:04:01
文章目錄第1章 緒論第2章 運(yùn)動(dòng)曲線2.0 引言2.1 運(yùn)動(dòng)學(xué)的基本概念2.2 常見運(yùn)動(dòng)曲線2.2.1 梯形速度曲線2.2.2 S 形速度曲線第3章 傳動(dòng)鏈設(shè)計(jì)第1章 緒論什么是運(yùn)動(dòng)控制系統(tǒng)?運(yùn)動(dòng)
2021-09-01 07:06:21
什么是運(yùn)動(dòng)控制系統(tǒng)?運(yùn)動(dòng)控制系統(tǒng)的任務(wù)是什么?
2021-10-29 07:40:48
什么是機(jī)器人控制系統(tǒng)?機(jī)器人的運(yùn)動(dòng)控制系統(tǒng)包含哪些方面?機(jī)器人控制系統(tǒng)的基本功能有哪些?
2021-10-11 09:38:12
基礎(chǔ)設(shè)施和資產(chǎn)的消耗,特別是有多個(gè)設(shè)施分布分步在不同地理位置的情況下。 解決方案: 創(chuàng)建堅(jiān)固靈活的嵌入式功率電源監(jiān)視與控制系統(tǒng),用于基于NI單板RIO和NI LabVIEW的設(shè)施管理,減少大型設(shè)施
2019-05-16 09:40:02
使用labview2012的ni softmotion 模塊與SolidWorks聯(lián)合仿真部署時(shí)總是出現(xiàn)問題 沖突 拒絕訪問 。網(wǎng)上一些人說是缺少插件或者驅(qū)動(dòng) 是缺少softmotion
2017-05-26 11:14:49
嵌入式技術(shù)在工業(yè)控制領(lǐng)域的應(yīng)用還不太成熟,近年來,工業(yè)控制對(duì)運(yùn)動(dòng)控制系統(tǒng)的要求越來越高,為了滿足新一代運(yùn)動(dòng)控制系統(tǒng)的各項(xiàng)性能要求,嵌入式運(yùn)動(dòng)控制器應(yīng)運(yùn)而生。而基于ARM運(yùn)動(dòng)控制芯片的新一代運(yùn)動(dòng)
2019-10-11 06:30:55
需要做一個(gè)基于labview 加運(yùn)動(dòng)控制卡的伺服電機(jī)運(yùn)動(dòng)控制系統(tǒng),請(qǐng)問PCI-7831R 這塊板是運(yùn)動(dòng)控制卡嗎,可不可以用來做,百度了是什么多功能RIO,新手,不太懂求指教
2015-12-09 18:15:35
的LabVIEW開發(fā)的液位控制系統(tǒng)已經(jīng)在實(shí)驗(yàn)室條件下對(duì)單容液位對(duì)象實(shí)施了自動(dòng)控制,取得了較好的調(diào)節(jié)效果。2 系統(tǒng)結(jié)構(gòu)2.1 控制對(duì)象 該系統(tǒng)為FESTO緊湊型過程控制實(shí)驗(yàn)裝置,如圖1所示。水箱B102
2019-04-17 09:40:01
SoftMotion模塊設(shè)計(jì)VI可以運(yùn)行裝配文件并在CAD模型中進(jìn)行仿真,在SolidWorks創(chuàng)建三維模型構(gòu)建六自由度(DOF)系統(tǒng)的虛擬物理表現(xiàn),然后使用NI cRIO-9024嵌入式實(shí)時(shí)控制器和六個(gè)
2015-02-12 15:56:16
實(shí)行位置伺服和編碼器反饋,對(duì)直流電機(jī)利用線性電位器反饋電壓的方式實(shí)現(xiàn)了角度的反饋控制。借助LabVIEW8.2 的強(qiáng)大功能,我們得以在短時(shí)間內(nèi)完成了控制系統(tǒng)的開發(fā),同時(shí)保證了機(jī)械臂的運(yùn)動(dòng)精度與負(fù)載能力
2015-02-12 16:10:04
,不過具體原理還是遵循于傳統(tǒng)。使用NI DAQ設(shè)備和LabVIEW構(gòu)造PID控制系統(tǒng)美國國家儀器公司(簡(jiǎn)稱NI)提供了在LabVIEW中使用的PID控制工具包,可幫助工程師結(jié)合NI數(shù)據(jù)采集設(shè)備快速
2019-05-14 09:40:11
1、基于RT-Thread+RA6M4的麥輪結(jié)構(gòu)的底盤運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì)本項(xiàng)目設(shè)計(jì)了一個(gè)麥輪結(jié)構(gòu)的小車底盤運(yùn)動(dòng)系統(tǒng),經(jīng)過對(duì)底盤的運(yùn)動(dòng)學(xué)分析,解算出每個(gè)麥輪的運(yùn)動(dòng)信息。然后經(jīng)過8路PWM控制四路橋式電路
2022-08-17 14:50:12
在多軸伺服控制系統(tǒng)中實(shí)現(xiàn)同步精密運(yùn)動(dòng)
2021-01-27 07:45:40
如何實(shí)現(xiàn)基于STM32F103懸掛運(yùn)動(dòng)控制系統(tǒng)的設(shè)計(jì)?
2021-12-23 06:47:52
運(yùn)動(dòng)控制系統(tǒng)被廣泛地運(yùn)用于各個(gè)領(lǐng)域。傳統(tǒng)的運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì)有基于PC的中央控制方式和基于微控制器的嵌入式控制方式等。
2019-08-28 07:00:52
控制系統(tǒng)的精確控制是非常困難的。靠改變懸掛被控對(duì)象的繩索長(zhǎng)短來控制被控對(duì)象運(yùn)動(dòng)軌跡的懸掛運(yùn)動(dòng)控制系統(tǒng),在生產(chǎn)控制等領(lǐng)域有很廣的應(yīng)用范圍,但受技術(shù)上的制約,使用也有一定限制。
2019-08-12 08:21:38
通常用什么辦法來評(píng)估一個(gè)運(yùn)動(dòng)控制系統(tǒng)的動(dòng)態(tài)響應(yīng)速度
2023-10-13 07:12:55
本文采用Verilog FPGA設(shè)計(jì)懸掛運(yùn)動(dòng)控制系統(tǒng)的控制器,通過輸入模塊傳送控制參數(shù),采用HDL語言編程實(shí)現(xiàn)的控制算法,驅(qū)動(dòng)步進(jìn)電機(jī),對(duì)懸掛運(yùn)動(dòng)物體進(jìn)行精確的控制。
2021-05-06 07:11:03
怎樣去搭建一個(gè)基于TwinCAT的運(yùn)動(dòng)控制系統(tǒng)?基于TwinCAT的運(yùn)動(dòng)控制系統(tǒng)應(yīng)具備哪些功能?
2021-08-24 06:27:47
模型電動(dòng)汽車系統(tǒng)是怎樣構(gòu)成的?怎樣去設(shè)計(jì)一種雙后輪驅(qū)動(dòng)電動(dòng)汽車運(yùn)動(dòng)控制系統(tǒng)?
2021-05-13 06:19:27
我已經(jīng)安裝了labview2015。安裝softmotion模塊之后,為什么labview中并沒有顯示softmotion函數(shù)?
2018-09-20 11:12:48
工業(yè)運(yùn)動(dòng)控制系統(tǒng)方案XM5728-IDK-V3 機(jī)器視覺&運(yùn)動(dòng)控制主板■產(chǎn)品采用核心板+底板結(jié)構(gòu),配置應(yīng)需而變■ARM核負(fù)責(zé)HMI界面+DSP核處理復(fù)雜數(shù)據(jù)計(jì)算+FPGA 高速運(yùn)動(dòng)控制■支持
2021-09-07 07:26:54
什么是激光SLAM?激光SLAM技術(shù)在機(jī)器人運(yùn)動(dòng)控制系統(tǒng)中的應(yīng)用是什么?
2021-07-30 06:37:25
最近正在研究一個(gè)六軸的機(jī)械手,目前的想法是,用LABVIEW配合動(dòng)控制卡,來做運(yùn)動(dòng)控制系統(tǒng),這一周都在自學(xué)labview,可以說有點(diǎn)入門了,但是現(xiàn)在有個(gè)疑問,要是想實(shí)現(xiàn)運(yùn)動(dòng)控制,應(yīng)該用labview
2013-08-03 14:42:02
請(qǐng)問基于labview的X/Y工作臺(tái)運(yùn)動(dòng)控制系統(tǒng)該怎么辦寫?有這方面的資料嗎,求分享。
2014-12-03 10:10:31
LabVIEW8.2的強(qiáng)大功能,我們得以在短時(shí)間內(nèi)完成了控制系統(tǒng)的開發(fā),同時(shí)保證了機(jī)械臂的運(yùn)動(dòng)精度與負(fù)載能力。四自由度機(jī)械臂機(jī)械系統(tǒng) 本文討論的四自由度機(jī)械臂面向中小型物流系統(tǒng)應(yīng)用。其基本的設(shè)計(jì)要求為:實(shí)用、有
2019-05-06 09:26:38
CRT工業(yè)運(yùn)動(dòng)控制系統(tǒng),其硬件結(jié)構(gòu)基于高性能 DSP 為控制核心、FPGA 協(xié)處理,插補(bǔ)算法、脈沖信號(hào)產(chǎn)生及直線曲線加減速控制、I/O 信號(hào)的檢測(cè)處理。DMC600M系列3~6軸運(yùn)動(dòng)控制系統(tǒng)
2022-02-26 16:26:24
運(yùn)動(dòng)控制系統(tǒng)的核心控制對(duì)象是軸。采用面向?qū)ο蠓椒ǎ⑤S對(duì)象的類結(jié)構(gòu)、狀態(tài)轉(zhuǎn)移圖和數(shù)據(jù)流圖,在該模型的基礎(chǔ)上,可以進(jìn)行軸控制參數(shù)的設(shè)置,運(yùn)動(dòng)控制庫函數(shù)的規(guī)劃和
2009-06-09 11:44:22 10
10 試驗(yàn)車運(yùn)動(dòng)控制系統(tǒng)包含S7200 PLC程控器和兩套伺服控制系統(tǒng)(一套控制車體、一套控制電纜盤)。車體控制系統(tǒng)為速度控制模式,電纜盤控制系統(tǒng)為轉(zhuǎn)矩控制模式。S7200 PLC和兩套伺
2009-06-16 10:53:1917 對(duì)LabVIEW 與Matlab 在仿真中的應(yīng)用進(jìn)行了比較分析,介紹了LabVIEW 圖形化軟件的G 語言控制與仿真功能,在此基礎(chǔ)上,在LabVIEW 環(huán)境下進(jìn)行了線性控制系統(tǒng)時(shí)域仿真的研究與分析。
2009-09-12 16:14:1735 本文介紹了虛擬儀器軟件LabVIEW的NI LabVIEW仿真模塊,并且利用LabVIEW的可視化技術(shù),直觀、生動(dòng)地模擬了PWM控制系統(tǒng)的運(yùn)行狀況,使仿真具有良好的效果。通過對(duì)PWM控制系統(tǒng)的仿真研
2009-12-14 16:28:0243 本文介紹了一個(gè)基于多軸運(yùn)動(dòng)控制卡的運(yùn)動(dòng)控制系統(tǒng)。該系統(tǒng)以工控計(jì)算機(jī)、通用操作系統(tǒng)、PCI-8134多軸運(yùn)動(dòng)控制卡及其功能庫函數(shù)為平臺(tái),采用VC++開發(fā)的人機(jī)界面,實(shí)現(xiàn)了三軸(X,Y,Z軸
2010-02-11 14:20:3855 玩轉(zhuǎn)魔方- NI PAC實(shí)現(xiàn)工業(yè)高速運(yùn)動(dòng)控制與視覺應(yīng)用-labview視頻教程
2010-03-26 16:37:0862 NI集成視覺與運(yùn)動(dòng)的告訴工業(yè)自動(dòng)化應(yīng)用--labview視頻教程
2010-03-26 16:48:45155 如何設(shè)計(jì)運(yùn)動(dòng)控制系統(tǒng)
本內(nèi)容主要包括直流調(diào)速、交流調(diào)速和隨動(dòng)系統(tǒng)三部分。直流調(diào)速部分主要介紹單閉環(huán)、雙閉環(huán)直流調(diào)速系統(tǒng)和以全控型功率器件為主的
2010-03-31 15:30:389 本文介紹了虛擬儀器軟件LabVIEW的NI LabVIEW仿真模塊,并且利用LabVIEW的可視化技術(shù),直觀、生動(dòng)地模擬了PWM控制系統(tǒng)的運(yùn)行狀況,使仿真具有良好的效果。通過對(duì)PWM控制系統(tǒng)的仿真研究,在
2010-07-13 16:13:04118 提出了一種基于多軸運(yùn)動(dòng)控制器的轉(zhuǎn)臺(tái)控制系統(tǒng)的組成方案.給出了轉(zhuǎn)臺(tái)的基本組成, 介紹了多軸運(yùn)動(dòng)控制卡功能及其硬軟件的開放性。分析了控制系統(tǒng)的組成原理,詳細(xì)介紹了控制
2010-09-23 11:58:3125 NI推出用于機(jī)器人控制系統(tǒng)的LabVIEW Robotics 2009
美國國家儀器有限公司(National Instruments,簡(jiǎn)稱NI)近日宣布推出LabVIEW Robotics 2009。作為圖形化系統(tǒng)設(shè)計(jì)(GSD)軟件的新成員,
2010-02-02 17:39:43 1087
1087 摘要: 暖通空調(diào)(HVAC)系統(tǒng)中建立一套對(duì)各種水閥、風(fēng)閥、變風(fēng)量箱、電加熱器、加濕器以及其他
控制元件進(jìn)行準(zhǔn)確測(cè)量及時(shí)控制的數(shù)據(jù)采集控制系統(tǒng)。使用NI公司的LabVIEW
2010-05-29 11:42:001679 
使用LabVIEW NI SoftMotion模塊設(shè)計(jì)VI可以運(yùn)行裝配文件并在CAD模型中進(jìn)行仿真,在SolidWorks創(chuàng)建三維模型構(gòu)建六自由度(DOF)系統(tǒng)的虛擬物理表現(xiàn),然后使用NI cRIO-9024嵌入式實(shí)時(shí)控制器
2010-12-23 11:43:411218 本文介紹一種基于LabVIEW的汽車雨刮器綜合控制系統(tǒng)的設(shè)計(jì),描述了軟件界面設(shè)計(jì)、參數(shù)測(cè)量及數(shù)據(jù)處理的實(shí)現(xiàn)方法。使用產(chǎn)品:Labview8.6軟件開發(fā)平臺(tái);NI PCI-7831R數(shù)據(jù)采集卡。
2012-11-30 17:21:381713 《NI運(yùn)動(dòng)控制》是在測(cè)量、控制與測(cè)試應(yīng)用中將運(yùn)動(dòng)與機(jī)器視覺和傳感器I/O緊密集成的理想解決方案,工程師將NI運(yùn)動(dòng)控制作為完整的機(jī)器設(shè)計(jì)平臺(tái)的一部分,可以更快的速度和更低的成
2013-05-02 17:20:53292 提出一種基于ARM Cortex-M3為核心的運(yùn)動(dòng)控制器的新運(yùn)動(dòng)控制方案,并給出關(guān)鍵算法。控制系統(tǒng)采用ARM運(yùn)動(dòng)控制器+PC機(jī)的結(jié)構(gòu)。PC機(jī)實(shí)現(xiàn)界面功能以及部分預(yù)處理功能,運(yùn)動(dòng)控制器則完成關(guān)
2013-09-25 14:39:0496 簡(jiǎn)介:智能機(jī)器基礎(chǔ)網(wǎng)絡(luò)教程系列視頻。此網(wǎng)絡(luò)教程概述了如何使用NI SoftMotion實(shí)現(xiàn)專業(yè)、高性能的系統(tǒng),比起傳統(tǒng)方法更加有效。更多智能機(jī)器信息見 ni.com/white-paper/13360/zhs/?metc=mtqvhz
2013-11-18 11:22:515919 電路拖動(dòng)自動(dòng)控制系統(tǒng)運(yùn)動(dòng)控制系統(tǒng)電路拖動(dòng)自動(dòng)控制系統(tǒng)運(yùn)動(dòng)控制系統(tǒng)
2015-11-10 11:01:444 電力拖動(dòng)自動(dòng)控制系統(tǒng)--運(yùn)動(dòng)控制系統(tǒng)第4版_思考題答案
2015-12-03 15:42:520 打造完全可重配置運(yùn)動(dòng)控制系統(tǒng) ,NI LabVIEW。
2016-03-21 16:19:310 運(yùn)動(dòng)控制系統(tǒng)課件,對(duì)于運(yùn)動(dòng)控制系統(tǒng)這門課程,里面的課件進(jìn)行一一解剖分析,只為讓你們更好地掌握這門課程
2016-06-15 15:53:570 運(yùn)動(dòng)控制系統(tǒng),教材,有點(diǎn)老舊,大部分都是同異步電機(jī),PDF版。
2016-11-10 11:41:200 基于LabVIEW的氫氧復(fù)合控制系統(tǒng)設(shè)計(jì)_李樂斌
2017-01-13 21:40:360 基于LabVIEW的儀器控制系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)_胡鐵喬
2017-01-13 21:40:368 風(fēng)力擺運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì)_張國軍
2017-03-19 19:04:2312 DSP的運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì)
2017-10-19 14:58:4212 運(yùn)動(dòng)控制系統(tǒng)的定義 運(yùn)動(dòng)控制系統(tǒng)(Motion Control System)也可稱作電力拖動(dòng)控制系統(tǒng)(Control Systems of Electric Drive) 運(yùn)動(dòng)控制系統(tǒng)--通過
2017-11-09 11:35:2414 精密機(jī)械運(yùn)動(dòng)控制系統(tǒng) 針對(duì)機(jī)械類專業(yè)學(xué)生、滿足其對(duì)精密運(yùn)動(dòng)控制新理論和新技術(shù)的需求;從實(shí)踐中來,本書內(nèi)容體系從機(jī)器人與數(shù)控機(jī)床控制系統(tǒng)中提煉;涵蓋運(yùn)動(dòng)控制系統(tǒng)的機(jī)械結(jié)構(gòu)設(shè)計(jì)和傳感測(cè)量等內(nèi)容;介紹
2017-11-24 15:22:1756 本文主要介紹了基于LabVIEW的交通燈控制系統(tǒng)設(shè)計(jì)與仿真。傳統(tǒng)的十字路口交通控制系統(tǒng)中,一般只采用紅綠黃燈分方向輪流控制形式,沒有考慮到實(shí)時(shí)的各方向路面車流輛情況,緊急突發(fā)事件的應(yīng)急處理等,這樣
2018-01-09 11:39:0639901 
本文首先介紹了伺服運(yùn)動(dòng)控制系統(tǒng)主要特點(diǎn),其次介紹了伺服運(yùn)動(dòng)控制系統(tǒng)工作原理,最后從機(jī)器人移動(dòng)方式的選擇與結(jié)構(gòu)設(shè)計(jì)、移動(dòng)機(jī)器人運(yùn)動(dòng)控制系統(tǒng)及機(jī)器人的控制系統(tǒng)設(shè)計(jì)三個(gè)方面來詳細(xì)介紹機(jī)器人伺服運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì),具體的跟隨小編一起來了解一下。
2018-06-01 14:19:3614965 采樣、處理設(shè)備; 特種數(shù)控機(jī)床; 機(jī)器視覺及自動(dòng)檢測(cè)設(shè)備; 工業(yè)機(jī)器人; 其它控制步進(jìn)電機(jī)、伺服電機(jī)的自動(dòng)化設(shè)備。 產(chǎn)品簡(jiǎn)介 DMC650M運(yùn)動(dòng)控制系統(tǒng),可支持多個(gè)(最多 254 個(gè))控制器和PC/觸摸屏組成控制網(wǎng)絡(luò),也可應(yīng)用于需要獨(dú)立運(yùn)行的場(chǎng)合。其硬件結(jié)構(gòu)基于
2020-04-09 16:45:534833 本文檔的主要內(nèi)容詳細(xì)介紹的是電力拖動(dòng)自動(dòng)控制系統(tǒng)之運(yùn)動(dòng)控制系統(tǒng)的資料簡(jiǎn)介包括了:運(yùn)動(dòng)控制系統(tǒng)及其組成,運(yùn)動(dòng)控制系統(tǒng)的歷史與發(fā)展,運(yùn)動(dòng)控制系統(tǒng)轉(zhuǎn)矩控制規(guī)律,生產(chǎn)機(jī)械的負(fù)載轉(zhuǎn)矩特性。
2020-06-11 08:00:004 有了來自Nation Instruments的LabVIEW NI SoftMotion模塊,您可以使用LabVIEW項(xiàng)目對(duì)您的運(yùn)動(dòng)軸設(shè)置進(jìn)行配置和測(cè)試,調(diào)節(jié)您的伺服電機(jī)。它提供
2020-08-17 13:40:141685 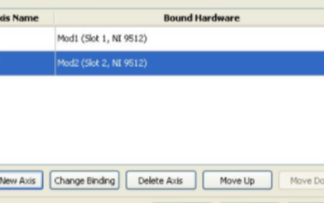
電力拖動(dòng)自動(dòng)控制系統(tǒng)之運(yùn)動(dòng)控制系統(tǒng)電子版
2021-07-16 10:46:180 的控制系統(tǒng)。系統(tǒng)由CIF50一DNM PCI和工控機(jī)以及帶Devicenet總線接口的逆變焊接電源組成,通過調(diào)用動(dòng)態(tài)鏈接庫(CLN)節(jié)點(diǎn)的方式,解決了LabVIEW 環(huán)境中不能直接驅(qū)動(dòng)非NI公司的總線板卡的問題。實(shí)驗(yàn)結(jié)果表明,系統(tǒng)工作穩(wěn)定,能實(shí)現(xiàn)對(duì)焊接電流的實(shí)時(shí)控制.滿足了對(duì)焊接質(zhì)量控制的要求。
2021-09-18 13:48:371 電力拖動(dòng)自動(dòng)控制系統(tǒng)-運(yùn)動(dòng)控制系統(tǒng)-陳伯時(shí)-PDF第5版教材免費(fèi)下載。
2022-04-11 15:21:370 控制系統(tǒng)的結(jié)構(gòu)從最初的CCS(計(jì)算機(jī)集中控制系統(tǒng)),到第二代的DCS(分散控制系統(tǒng)),發(fā)展到現(xiàn)在流行的FCS(現(xiàn)場(chǎng)總線控制系統(tǒng))。
2022-07-14 14:06:493749 運(yùn)動(dòng)控制系統(tǒng) 其實(shí)運(yùn)動(dòng)控制系統(tǒng)是一個(gè)比較大的系統(tǒng),就像前面的通信系統(tǒng)一樣,通常會(huì)由眾多的組成部分構(gòu)成。運(yùn)動(dòng)控制系統(tǒng)會(huì)綜合信號(hào)分析與處理、自動(dòng)控制、通信等的內(nèi)容。 運(yùn)動(dòng)的要素 抽象來講,運(yùn)動(dòng)的要素
2023-04-21 18:02:141214 運(yùn)動(dòng)控制系統(tǒng)開發(fā)與應(yīng)用 運(yùn)動(dòng) 是以 為控制對(duì)象,以控制器為核心,以電力電子、功率變換裝置為執(zhí)行機(jī)構(gòu),在控制理論指導(dǎo)下組成的電氣傳動(dòng)控制系統(tǒng)。運(yùn)動(dòng)控制系統(tǒng)多種多樣,但從基本結(jié)構(gòu)上看,一個(gè)典型的現(xiàn)代運(yùn)動(dòng)
2023-04-21 18:04:19693 運(yùn)動(dòng)控制系統(tǒng)其實(shí)運(yùn)動(dòng)控制系統(tǒng)是一個(gè)比較大的系統(tǒng),就像前面的通信系統(tǒng)一樣,通常會(huì)由眾多的組成部分構(gòu)成。運(yùn)動(dòng)控制系統(tǒng)會(huì)綜合信號(hào)分析與處理、自動(dòng)控制、通信等的內(nèi)容。運(yùn)動(dòng)的要素抽象來講,運(yùn)動(dòng)的要素可概況
2023-10-25 08:07:52819 
器及相應(yīng)的傳感器構(gòu)成,其框圖及涉及學(xué)科領(lǐng)域如下圖: 對(duì)照運(yùn)動(dòng)控制系統(tǒng)的結(jié)構(gòu)框圖,可以推斷出智能車中的運(yùn)動(dòng)控制系統(tǒng)如下: 被控對(duì)象 電機(jī)是門深?yuàn)W的學(xué)問號(hào)稱自動(dòng)化專業(yè)的天書之最(筆者當(dāng)初被電機(jī)學(xué)折磨的有陰影,故有關(guān)電
2023-11-14 15:54:20517 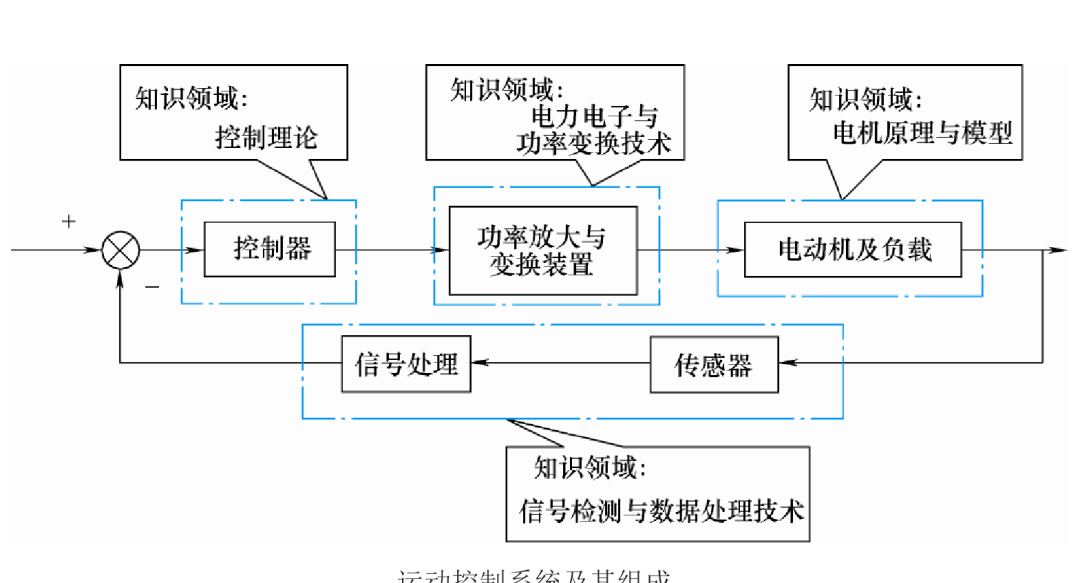
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論