您好,我用F28035做步進(jìn)電機(jī)的位置控制,傳感器使用增量式5線(xiàn)編碼器,有以下幾個(gè)問(wèn)題:1. 傳感器5V供電,方波信號(hào)的高電平在4.2V以上,編碼器和28035芯片之間需要調(diào)理電路么?直接連到芯片
2020-05-20 15:02:44
、過(guò)壓、欠壓以及斷電。提供可在發(fā)生故障時(shí)關(guān)閉編碼器電源或在未連接編碼器時(shí)節(jié)省電能的選項(xiàng)。3.3V 接口具有同樣支持 2.5V 或 1.8V I/O 接口的電平位移器,通過(guò)這些接口可連接到用以運(yùn)行 BiSS(或 SSI)主器件的處理器`
2015-04-29 11:27:30
你好 ,我們知道三星的處理器供貨周期比較短,敢問(wèn)Sitara 系列arm處理器的供貨周期一般多少年啊?
2018-06-21 16:49:27
){;}6、最后一個(gè)問(wèn)題那么如果當(dāng)前并沒(méi)有到一個(gè)中斷怎么辦?難道這個(gè)時(shí)候就不能得到編碼器的精確位置了嗎?其實(shí)只是個(gè)非常簡(jiǎn)單的算法:u32 EncodeGetMileage(u8 none1,u8
2021-04-14 09:19:31
){;}6、最后一個(gè)問(wèn)題那么如果當(dāng)前并沒(méi)有到一個(gè)中斷怎么辦?難道這個(gè)時(shí)候就不能得到編碼器的精確位置了嗎?其實(shí)只是個(gè)非常簡(jiǎn)單的算法:u32 EncodeGetMileage(u8 none1,u8
2021-05-17 06:00:00
系統(tǒng)起動(dòng)位置環(huán),通過(guò)不斷測(cè)量光電編碼器每秒鐘輸出的脈沖個(gè)數(shù),并與標(biāo)準(zhǔn)值PD(理想值)進(jìn)行比較,計(jì)算出增量△P并將之轉(zhuǎn)換成對(duì)應(yīng)的D/A輸出數(shù)字量,通過(guò)控制器減少輸個(gè)電機(jī)的脈沖個(gè)數(shù),在原來(lái)輸出電壓的基礎(chǔ)上
2012-02-24 22:03:25
我想做一個(gè)裝置,配置是這樣:編碼器安裝在滾輪的一端,一個(gè)傳感器,當(dāng)傳感器觸發(fā)on時(shí),對(duì)編碼器反饋的脈沖進(jìn)行采集,傳感器off時(shí)停止采集,然后把得到的脈沖數(shù)傳給計(jì)算機(jī),請(qǐng)問(wèn)資深專(zhuān)業(yè)人士,有什么方法去實(shí)現(xiàn)這樣的功能,或者有什么樣的電路板可以實(shí)現(xiàn)這樣的功能,謝謝。
2014-01-17 23:55:37
編碼器的每一個(gè)位置對(duì)應(yīng)一個(gè)確定的數(shù)字碼,因此它的示值只與測(cè)量的起始和終止位置有關(guān),而與測(cè)量的中間過(guò)程無(wú)關(guān)。根據(jù)檢測(cè)原理,編碼器可分為光學(xué)式、磁式、感應(yīng)式和電容式。根據(jù)其刻度方法及信號(hào)輸出形式,可分為增量式
2019-10-13 08:00:00
編碼器的原理是什么?編碼器可分為哪幾類(lèi)?編碼器是如何進(jìn)行接線(xiàn)的?編碼器軟件四倍頻技術(shù)是什么?
2021-08-04 06:08:39
編碼器是什么?編碼器工作原理是什么?
2021-10-19 09:59:08
編碼器是什么?編碼器主要分為哪幾種?編碼器測(cè)速的大致原理是什么?
2021-06-30 07:48:39
長(zhǎng)距離傳輸。其缺點(diǎn)是無(wú)法輸出軸轉(zhuǎn)動(dòng)的絕對(duì)位置信息。2、絕對(duì)式編碼器 絕對(duì)式編碼器是直接輸出數(shù)字的傳感器,在它
2022-01-20 06:47:46
確定的數(shù)字碼,因此它的示值只與測(cè)量的起始和終止位置有關(guān),而與測(cè)量的中間過(guò)程無(wú)關(guān)。一、編碼器的分類(lèi) 根據(jù)檢測(cè)原理,編碼器可分為光學(xué)式、磁式、感應(yīng)式和電容式,根據(jù)其刻度方法及信號(hào)輸出形式,可分為增量式
2017-11-24 19:00:47
小弟想用STM32接編碼器,編碼器一直正轉(zhuǎn)使計(jì)數(shù)器到達(dá)自動(dòng)載入值后溢出產(chǎn)生的中斷事件和一直反轉(zhuǎn)使計(jì)數(shù)器到零后又自動(dòng)裝入初始值產(chǎn)生的中斷事件,這兩個(gè)中斷能從標(biāo)志位上判斷出來(lái)嗎?我就是想找個(gè)方法來(lái)區(qū)分出計(jì)數(shù)器是上溢還是下溢。
2020-07-14 08:00:11
請(qǐng)問(wèn)一下哪位有編碼器轉(zhuǎn)換為數(shù)字信號(hào)的資料?本人最近做測(cè)量深度,需要用旋轉(zhuǎn)編碼器來(lái)實(shí)現(xiàn),各位大神給點(diǎn)這方面的資料吧!旋轉(zhuǎn)編碼器過(guò)來(lái)的是脈沖信號(hào)。
2015-09-28 15:11:18
為什么在使用同步機(jī)做自整定的時(shí)候,整定的角度有時(shí)候偏差會(huì)比較大,會(huì)出現(xiàn)飛車(chē)現(xiàn)象。而更改編碼器后可以正常整定。請(qǐng)問(wèn)編碼器什么情況下會(huì)導(dǎo)致這樣的問(wèn)題。另外,斷電測(cè)試時(shí)候,編碼器會(huì)損壞的原因有哪些?(電源穩(wěn)定)
2018-09-07 14:40:40
出支持多種協(xié)議的產(chǎn)品。主要特性與優(yōu)勢(shì)主要特性客戶(hù)優(yōu)勢(shì)支持集成型 PROFIBUS 通信功能的 ARM9 微處理器(AM1810 Sitara ARM MPU)-可為應(yīng)用處理器中的 PROFIBUS
2011-01-24 10:41:47
AM335x Sitara 處理器
2015-07-07 08:07:39
AM387x Sitara?處理器
2015-07-07 08:09:39
AM389x Sitara?處理器
2015-07-07 15:41:17
的應(yīng)用挑選恰當(dāng)?shù)?b class="flag-6" style="color: red">Sitara AM57x處理器。 有了集成式視頻和圖形加速器的選項(xiàng),工程師就能輕而易舉地把1080p視頻和2D或3D圖形界面整合到任何嵌入式應(yīng)用。 AM57x處理器正在改變嵌入式處理領(lǐng)域
2018-09-04 09:54:55
描述C2000? 位置管理器技術(shù)可提供集成式解決方案來(lái)連接數(shù)字絕對(duì)編碼器以及旋轉(zhuǎn)變壓器和 SINCOS 傳感器,從而無(wú)需使用工業(yè)逆變器和伺服驅(qū)動(dòng)器中常用的附加電路。TIDA-1008 所示的位置
2018-10-23 11:53:04
編碼器時(shí)節(jié)省電能的選項(xiàng)。電平位移器支持 3.3V、2.5V 或 1.8V I/O 接口,通過(guò)這些接口可連接到用于 EnDat 2.2 主器件的 Sitara AM4x 等處理器。`
2015-04-29 11:55:26
符合 HIPERFACE DSL 規(guī)范的通過(guò) RS485 的線(xiàn)路端接和耦合功能。此設(shè)計(jì)已針對(duì)線(xiàn)纜長(zhǎng)度高達(dá) 100m 的集成電纜進(jìn)行測(cè)試,其中編碼器的兩線(xiàn)雙絞線(xiàn)已集成到同一電機(jī)電纜。編碼器連接器輸出受到
2022-09-26 06:16:08
來(lái)源 靈動(dòng)MM32一、編碼器功能簡(jiǎn)介在馬達(dá)類(lèi)控制應(yīng)用中,正交編碼器可以反饋馬達(dá)的轉(zhuǎn)子位置及轉(zhuǎn)速信號(hào)。MM32系列MCU集成了正交編碼器接口,便于客戶(hù)使用。先簡(jiǎn)單回顧下編碼器原理:如果兩個(gè)信號(hào)相位差為
2018-02-08 16:40:53
我想問(wèn)一下,TI的PMSM的例程庫(kù)里,增量編碼器永磁同步電機(jī),初始位置是通過(guò)什么方式實(shí)現(xiàn)的。在例程的那個(gè)位置,謝謝
2018-10-30 15:58:42
1、PMSM的TI庫(kù)中,對(duì)于增量編碼器模式,如何確定初始位置2、有沒(méi)有其他方法電機(jī)初始位置
2018-10-30 16:27:52
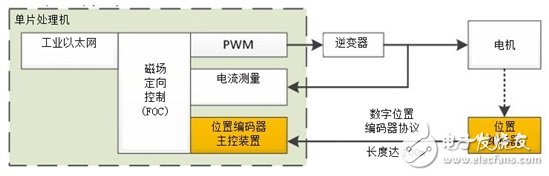
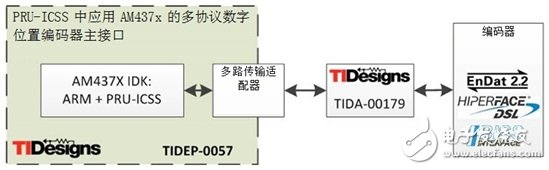
的另一個(gè)應(yīng)用,即幫助把您選擇的數(shù)字位置編碼器主接口集成入Sitara處理器內(nèi)。首先,讓我們來(lái)看下包含位置編碼器的系統(tǒng)層面方塊圖——見(jiàn)圖1。諸如伺服驅(qū)動(dòng)器等應(yīng)用通常都配有集成了數(shù)字位置反饋編碼器的電機(jī)。位置
2019-08-05 04:45:13
旋轉(zhuǎn)編碼器的原理是什么?如何去編寫(xiě)STM32配置Arduino的程序?STM32 Arduino是如何讀取編碼器和旋轉(zhuǎn)位置方向的?
2021-11-15 08:01:24
正在做一項(xiàng)目,要用到編碼器,編碼器就是普通的1000線(xiàn)增量式編碼器,用于步進(jìn)電機(jī)的定位反饋,這兩天實(shí)際測(cè)試,發(fā)現(xiàn)在高速情況(大于900rpm)下用STM32讀到的編碼器位置會(huì)超前理想位置(單片機(jī)實(shí)際
2019-03-18 08:15:28
為什么要用編碼器?STM32編碼器的原理是什么?
2021-11-24 07:32:10
STM32 Cubemax(五) —— STM32利用定時(shí)器編碼器模式處理帶編碼器直流電機(jī)文章目錄系列文章目錄前言一、pandas是什么?二、使用步驟1.引入庫(kù) 2.讀入數(shù)據(jù) 總結(jié)前言電賽延期了,趁
2021-09-03 07:38:51
STM8如何實(shí)現(xiàn)編碼器的脈沖處理呢
2023-10-23 07:42:14
描述TIDA-00178 參考設(shè)計(jì)是針對(duì)正弦/余弦位置編碼器且符合 EMC 標(biāo)準(zhǔn)的工業(yè)接口。其應(yīng)用包括需精確速度和位置控制的工業(yè)驅(qū)動(dòng)。該設(shè)計(jì)采用 16 位雙路取樣 ADC 且可使用插入式兼容 14
2018-12-19 14:12:35
labview現(xiàn)在可以采集編碼器的位置信息,但是由于是增量的編碼器,每次程序暫停后再運(yùn)行,編碼器的位置信息會(huì)自動(dòng)清零,而不是在上一次數(shù)據(jù)的基礎(chǔ)上增大或者減小請(qǐng)教該如何解決。
2019-10-23 09:54:56
講解人:趙云老師(張飛電子學(xué)院高級(jí)工程師)01.編碼器介紹編碼器是一種傳感器,主要是用來(lái)檢測(cè)機(jī)械運(yùn)動(dòng)的速度、位置、角度、距離或計(jì)數(shù),它是一種集光、機(jī)、電為一體的數(shù)字化檢測(cè)裝置,它具有分辨率高、精度高
2021-05-17 13:20:52
的。4。STM32f1系列定時(shí)器16位的問(wèn)題我用STM32的定時(shí)器3工作于編碼器方式,可以正常得到編碼器位置,但由于現(xiàn)在只有16位計(jì)數(shù),位數(shù)不夠,我想擴(kuò)展到32位,可以先用定時(shí)器內(nèi)部連接,將定時(shí)器3
2019-07-20 04:00:00
標(biāo)準(zhǔn)協(xié)議的3.3V數(shù)字接口。這個(gè)運(yùn)行相應(yīng)編碼器主控協(xié)議的主機(jī)處理器不屬于這個(gè)設(shè)計(jì)。圖2顯示的是一個(gè)通用數(shù)字接口模塊的經(jīng)簡(jiǎn)化系統(tǒng)方框圖。作為一個(gè)工業(yè)驅(qū)動(dòng)的子系統(tǒng),此模塊與絕對(duì)位置編碼器相連,淺綠色方框
2018-09-04 14:48:19
為什么要用電機(jī)驅(qū)動(dòng)?TB6612電機(jī)驅(qū)動(dòng)怎么實(shí)現(xiàn)?為什么要用電機(jī)編碼器?電機(jī)編碼器怎么使用?
2021-10-20 07:36:53
兩類(lèi)。增量式編碼器是將位移轉(zhuǎn)換成周期性的電信號(hào),再把這個(gè)電信號(hào)轉(zhuǎn)變成計(jì)數(shù)脈沖,用脈沖的個(gè)數(shù)表示位移的大小。絕對(duì)式編碼器的每一個(gè)位置對(duì)應(yīng)一個(gè)確定的數(shù)字碼,因此它的示值只與測(cè)量的起始和終止位置有關(guān),而與
2021-03-29 06:12:47
還是不要自己改,重新定制或買(mǎi)一根更長(zhǎng)的伺服編碼器線(xiàn)比較好。伺服編碼器接線(xiàn)方法伺服編碼器是伺服電機(jī)使用的編碼器,伺服電機(jī)編碼器接線(xiàn)主要有兩種方法︰1、方法一設(shè)置好伺服電機(jī)相應(yīng)的位置,連接時(shí)伺服電機(jī)編碼器
2023-03-09 18:22:01
(在此默認(rèn)Z信號(hào)的常態(tài)為低電平),鎖定編碼器與電機(jī)的相對(duì)位置關(guān)系。4、來(lái)回扭轉(zhuǎn)電機(jī)軸,撒手后,若電機(jī)軸每次自由回復(fù)到平衡位置時(shí),Z信號(hào)都能穩(wěn)定在高電平上,則完成調(diào)零操作。5、撤掉直流電源后,驗(yàn)證如下
2023-03-09 18:19:55
編碼器可以分為哪幾類(lèi)?怎樣去讀取編碼器的位置值?伺服電機(jī)與編碼器是怎樣工作的?
2021-09-26 08:43:27
什么是脈沖當(dāng)量?伺服電機(jī)和編碼器有什么關(guān)系?伺服電機(jī)自帶編碼器為什么還要外加編碼器?
2021-11-01 06:20:22
編碼器的原理是什么?電機(jī)編碼器是如何進(jìn)行接線(xiàn)的?編碼器接口的配置方式有哪些?使用編碼器時(shí)有哪些注意事項(xiàng)?
2021-08-02 10:21:23
任務(wù):使用定時(shí)器的編碼器功能,采集旋轉(zhuǎn)編碼器的信號(hào)并處理,使用LL庫(kù)網(wǎng)上似乎沒(méi)查到關(guān)于LL庫(kù)配置定時(shí)器編碼器模式,這篇博客用于分享我解決問(wèn)題的過(guò)程,以及提出一種實(shí)現(xiàn)方案。作者只是大四學(xué)生一枚,水平
2022-01-12 07:05:24
增量式編碼器工作原理是什么?增量式編碼器的結(jié)構(gòu)是由哪些部分組成的?光電旋轉(zhuǎn)編碼器使用方法是什么?單片機(jī)讀取光柵編碼器角度的方法是什么?
2021-06-30 07:29:18
可以直接通過(guò)編碼器讀取原點(diǎn)的位置嗎
2023-10-13 06:33:06
的電磁兼容(EMC)。電源。位置解碼和/或數(shù)字協(xié)議主站的信號(hào)處理。 圖2:工業(yè)驅(qū)動(dòng)器/變頻器上位置反饋接口模塊的簡(jiǎn)化方框圖具有RS-485或RS-422接口的增量型數(shù)字HTL/TTL編碼器和絕對(duì)型
2018-09-05 16:07:42
描述TI 提供用于在 Sitara 處理器上進(jìn)行集成式多協(xié)議工業(yè)以太網(wǎng)通信的系統(tǒng)解決方案。各種工業(yè)以太網(wǎng)標(biāo)準(zhǔn)都定義了設(shè)備通電后的快速啟動(dòng)。該 TI 設(shè)計(jì)描述了系統(tǒng)級(jí)的方法來(lái)支持使用 TI
2018-08-28 10:34:18
描述此參考設(shè)計(jì)基于 HEIDENHAIN EnDat 2.2 標(biāo)準(zhǔn)針對(duì)位置或旋轉(zhuǎn)編碼器實(shí)現(xiàn)了 EnDat 2.2 主協(xié)議棧和硬件接口。此設(shè)計(jì)由 EnDat 2.2 主協(xié)議棧、使用 RS-485
2022-09-23 06:53:43
編碼器實(shí)現(xiàn)指標(biāo)分析LDPC碼編碼器實(shí)現(xiàn)編碼器方案驗(yàn)證與優(yōu)缺點(diǎn)分析
2021-04-30 06:08:10
編碼器的工作原理及作用它是一種將旋轉(zhuǎn)位移轉(zhuǎn)換成一串數(shù)字脈沖信號(hào)的旋轉(zhuǎn)式傳感器,這些脈沖能用來(lái)控制角位移,如果編碼器與齒輪條或螺旋絲杠結(jié)合在一起,也可用于測(cè)量直線(xiàn)位移。 編碼器產(chǎn)生電信號(hào)后由數(shù)控制置
2021-10-21 15:02:23
編碼器是將位移轉(zhuǎn)換成周期性的電信號(hào),再把這個(gè)電信號(hào)轉(zhuǎn)變成計(jì)數(shù)脈沖,用脈沖的個(gè)數(shù)表示位移的大小。式編碼器的每一個(gè)位置對(duì)應(yīng)一個(gè)確定的數(shù)字碼,因此它的示值只與測(cè)量的起始和終止位置有關(guān),而與測(cè)量的中間過(guò)程無(wú)關(guān)
2021-10-20 15:02:02
編碼器的工作原理及作用它是一種將旋轉(zhuǎn)位移轉(zhuǎn)換成一串數(shù)字脈沖信號(hào)的旋轉(zhuǎn)式傳感器,這些脈沖能用來(lái)控制角位移,如果編碼器與齒輪條或螺旋絲杠結(jié)合在一起,也可用于測(cè)量直線(xiàn)位移。 編碼器產(chǎn)生電信號(hào)后由數(shù)控制置
2021-10-25 15:18:02
單位)的距離。在該等系統(tǒng)中,位置編碼器負(fù)責(zé)讀取電機(jī)軸的角度,并通過(guò)數(shù)字位置編碼器協(xié)議將信息提供給位置編碼器主控裝置。應(yīng)用處理器的磁場(chǎng)定向控制(FOC)算法負(fù)責(zé)對(duì)角度進(jìn)行進(jìn)一步處理,包括電機(jī)相電流測(cè)量,以計(jì)算脈沖寬度調(diào)制(PWM)外設(shè)的新值。…
2022-11-15 07:45:38
Sitara處理器系列的PRU-ICSS性能還可以被開(kāi)發(fā)成適用于多種協(xié)議的工業(yè)交換機(jī)。工業(yè)需求變得日趨復(fù)雜,對(duì)于性能的要求也越來(lái)越高,TI已經(jīng)找到了通過(guò)單個(gè)處理器解決方案來(lái)滿(mǎn)足行業(yè)需求的方法。相較于只支持ARM
2018-09-04 10:07:50
最近使用的有臺(tái)帶編碼器的伺服電機(jī)(配著相應(yīng)的伺服驅(qū)動(dòng)器)漏油,想拆開(kāi)更換油封,但是聽(tīng)說(shuō)伺服電機(jī)拆開(kāi)自己不能安裝。因?yàn)樯婕?b class="flag-6" style="color: red">到編碼器的位置。我想問(wèn)一下:
1.帶編碼器的電機(jī)能拆開(kāi)嗎?
2.電機(jī)拆開(kāi)的話(huà)
2023-12-15 06:57:52
;); #endifwhile(1){;}6、最后一個(gè)問(wèn)題那么如果當(dāng)前并沒(méi)有到一個(gè)中斷怎么辦?難道這個(gè)時(shí)候就不能得到編碼器的精確位置了嗎?其實(shí)只是個(gè)非常簡(jiǎn)單的算法:u32 EncodeGetMileage(u8 none1
2018-07-04 09:37:31
拉線(xiàn)位移編碼器_傳感器選型技巧拉線(xiàn)位移編碼器是測(cè)量?jī)x器,在測(cè)量物體的位移變化或者角度變化等方面起著很重要的作用,可以測(cè)量電子萬(wàn)能試驗(yàn)機(jī)的拉力壓力等,可以對(duì)起重機(jī)進(jìn)行位置定位,可以使用在建筑機(jī)械,工業(yè)
2020-08-11 10:08:49
我現(xiàn)在想買(mǎi)一個(gè)旋轉(zhuǎn)編碼器,用來(lái)反饋電機(jī)的位置(只是反饋電機(jī)的位置信號(hào),并不是驅(qū)動(dòng)電機(jī),因?yàn)槲矣行D(zhuǎn)變壓器跟驅(qū)動(dòng)器來(lái)驅(qū)動(dòng)電機(jī),只是想用電機(jī)的位置信號(hào)),但是旋轉(zhuǎn)編碼器的輸出信號(hào)是方波信號(hào),我應(yīng)該怎么處理成正弦波信號(hào)呢?比如說(shuō)轉(zhuǎn)一轉(zhuǎn)輸出一個(gè)正弦波,先謝謝大家了。
2017-07-13 10:17:04
一、介紹?? 旋轉(zhuǎn)編碼器是一種機(jī)電裝置,可將軸或軸的角位置或運(yùn)動(dòng),轉(zhuǎn)換為模擬或數(shù)字代碼。旋轉(zhuǎn)編碼器通常放置在垂直于軸的一側(cè)。旋轉(zhuǎn)編碼器用作檢測(cè)自動(dòng)化領(lǐng)域中的角度,速度,長(zhǎng)度,位置和加速度的傳感器。二
2021-06-30 07:37:51
旋轉(zhuǎn)編碼器是一種經(jīng)過(guò)驗(yàn)證的流行解決方案,用于測(cè)量旋轉(zhuǎn)軸的速度,運(yùn)動(dòng)方向或位置。有幾種不同的類(lèi)型,主要的兩種是絕對(duì)編碼器和增量編碼器。是如何工作的?有什么不同?如何為應(yīng)用選擇合適的類(lèi)型?
2021-01-01 07:46:31
在數(shù)字時(shí)代,需要快速高效地測(cè)量電機(jī)或旋轉(zhuǎn)儀器旋鈕上的機(jī)械軸的旋轉(zhuǎn)。諸如電位計(jì)和旋轉(zhuǎn)開(kāi)關(guān)之類(lèi)的模擬方法正在被可將旋轉(zhuǎn)運(yùn)動(dòng)直接數(shù)字化的旋轉(zhuǎn)編碼器所取代,但設(shè)計(jì)人員需要能夠理解各種編碼器類(lèi)型之間的差異,并
2021-02-22 06:09:31
旋轉(zhuǎn)位移編碼器檢測(cè)直線(xiàn)位移的方法有哪些?
2021-10-29 06:46:58
帶編碼器的步進(jìn)電機(jī),電機(jī)在工作的情況下有時(shí)會(huì)出現(xiàn)電機(jī)自身的步數(shù)和編碼器測(cè)得的步數(shù)不一致的情況!以編碼器測(cè)得的步數(shù)和電機(jī)自身的步數(shù)對(duì)比,調(diào)整電機(jī)步數(shù),有時(shí)會(huì)出現(xiàn)調(diào)整后的電機(jī)位置與預(yù)設(shè)位置不符現(xiàn)象,(步進(jìn)電機(jī)步數(shù)準(zhǔn)確,編碼器不準(zhǔn)確?)問(wèn)下有什么辦法解決沒(méi)?
2018-05-09 22:37:31
,用脈沖的個(gè)數(shù)表示位移的大小。絕對(duì)式編碼器的每一個(gè)位置對(duì)應(yīng)一個(gè)確定的數(shù)字碼,因此它的示值只與測(cè)量的起始和終止位置有關(guān),而與測(cè)量的中間過(guò)程無(wú)關(guān)。 1、增量式 增量式編碼器通常有3個(gè)輸出口,分別為A相、B相
2016-06-27 16:43:31
眾所周知,電機(jī)的自動(dòng)控制對(duì)象要主要三個(gè)是扭矩,速度,位置。扭矩涉及的是驅(qū)動(dòng)電流控制,本文僅談速度與位置自動(dòng)控制離不開(kāi)的旋轉(zhuǎn)編碼器。旋轉(zhuǎn)編碼器的主要作用是通過(guò)光電磁作用,將轉(zhuǎn)軸的角度轉(zhuǎn)化數(shù)字或模擬信號(hào)
2019-11-08 16:57:59
均可有不同的設(shè)置 —— 這取決于傳感器應(yīng)用。為連接到用戶(hù)/從站,“BiSS主站”協(xié)議應(yīng)是預(yù)先確定的,它可發(fā)送數(shù)據(jù)到位置編碼器,也能從位置編碼器接收數(shù)據(jù)。BiSS主站是軟件,并在Sitara?處理器或
2018-09-05 16:07:37
描述TIDA-00179 參考設(shè)計(jì)是一種符合 EMC 標(biāo)準(zhǔn)的通用數(shù)字接口,用于連接到絕對(duì)位置編碼器,例如 EnDat 2.2、BiSS?、SSI 或 HIPERFACE DSL?。該設(shè)計(jì)支持
2018-11-09 14:37:40
造成危險(xiǎn)。此外,由于絕對(duì)編碼器能實(shí)時(shí)提供真實(shí)的位置,因此數(shù)字系統(tǒng)可通過(guò)中央通信總線(xiàn)輪詢(xún)編碼器,以最小的延遲捕捉位置。使用增量編碼器來(lái)持續(xù)跟蹤位置難度更大,因?yàn)樗ǔP枰獠侩娐罚褂谜唤獯a跟蹤所有
2018-12-20 16:31:09
,在編碼器的每一個(gè)位置,通過(guò)讀取每道刻線(xiàn)的通、暗,獲得一組從2的零次方到2的n-1次方的唯一的2進(jìn)制編碼(格雷碼),這就稱(chēng)為n位絕對(duì)編碼器,這樣的編碼器是由光電碼盤(pán)進(jìn)行記憶的。絕對(duì)編碼器在一個(gè)特定的旋轉(zhuǎn)
2023-04-20 16:19:54
這個(gè)編碼器的輸出是相對(duì)位置還是絕對(duì)位置呢
2023-10-15 11:36:36
實(shí)現(xiàn)而且先進(jìn)的設(shè)計(jì)方法使設(shè)計(jì)周期越來(lái)越短第三是視頻壓縮標(biāo)準(zhǔn)的制定提供了統(tǒng)一的通信平臺(tái)導(dǎo)致了大量的應(yīng)用和市場(chǎng)的出現(xiàn).視頻編碼器的實(shí)現(xiàn)方案一個(gè)完整的視頻編碼器由視頻信號(hào)處理器(/01)、視頻控制器、視頻
2008-06-25 11:16:38
請(qǐng)問(wèn)一下運(yùn)動(dòng)控制卡中伺服電機(jī)的規(guī)劃位置與編碼器位置的區(qū)別是什么?
2021-10-12 11:24:30
如何實(shí)現(xiàn)軸角編碼器在伺服系統(tǒng)中的應(yīng)用?ZSZ數(shù)字化軸角編碼器模擬速度反饋信號(hào)的處理方法是什么?怎么進(jìn)行ZSZ軸角編碼器數(shù)字位置信號(hào)的采集和遠(yuǎn)距離傳輸?
2021-04-20 06:49:44
HIPERFACE DSL 規(guī)范的通過(guò) RS485 的線(xiàn)路端接和耦合功能。此設(shè)計(jì)已針對(duì)線(xiàn)纜長(zhǎng)度高達(dá) 100m 的集成電纜進(jìn)行測(cè)試,其中編碼器的兩線(xiàn)雙絞線(xiàn)已集成到同一電機(jī)電纜。編碼器連接器輸出受到過(guò)壓
2018-12-19 14:22:05
光電編碼器的A、B信號(hào)送至微處理器,進(jìn)行純軟件的倍頻和鑒相的判別。(3)通過(guò)硬件電路和軟件結(jié)合的方法進(jìn)行光電編碼器脈沖的處理,一般是指上述兩種方法的結(jié)合。對(duì)以上3種計(jì)數(shù)方法進(jìn)行分析可知,用純軟件計(jì)數(shù)
2019-06-10 05:00:08
TIDA-00179 是符合 EMC 標(biāo)準(zhǔn)的通用數(shù)字接口,可連接 EnDat 2.2、BiSS®、SSI 或 HIPERFACE DSL® 等絕對(duì)位置編碼器。此參考設(shè)計(jì)支持 15V
2009-08-15 11:17:51 0
0 編碼器工作原理和選型方法
絕對(duì)脈沖編碼器:APC
增量脈沖編碼器:SPC
兩者一般都應(yīng)用于速度控制或位置控制系統(tǒng)的檢測(cè)元件.
旋轉(zhuǎn)編碼器是用
2010-04-21 17:42:44 1446
1446 EnDat 2.2-位置編碼器雙向數(shù)字接口。
2016-03-14 15:50:0019 泰德- 00179參考設(shè)計(jì)是一種符合EMC標(biāo)準(zhǔn)的通用數(shù)字接口,用于連接到絕對(duì)位置編碼器,例如EnDat 2.2,bis,SSI或HIPERFACE DSL。該設(shè)計(jì)支持15-60V(標(biāo)稱(chēng)24
2017-05-04 16:35:2914 簡(jiǎn)述了復(fù)合式光電編碼器的工作原理,針對(duì)現(xiàn)有永磁同步電機(jī)轉(zhuǎn)子位置檢測(cè)方法的不足,提出了使用復(fù)合式光電編碼器對(duì)永磁同步電機(jī)轉(zhuǎn)子初始位置檢測(cè)及電機(jī)啟動(dòng)的方法,并通過(guò)以數(shù)字信號(hào)處理器(DSP)為核心的實(shí)驗(yàn)平臺(tái)進(jìn)行實(shí)驗(yàn),實(shí)驗(yàn)結(jié)果表明,該方法可以滿(mǎn)足實(shí)際使用的要求,實(shí)現(xiàn)了電機(jī)可靠啟動(dòng)、運(yùn)行。
2021-03-12 15:47:0020 的另一個(gè)應(yīng)用,即幫助把您選擇的數(shù)字位置編碼器主接口集成入Sitara處理器內(nèi)。
? 首先,讓我們來(lái)看下包含位置編碼器的系統(tǒng)層面方塊圖——見(jiàn)圖1。諸如伺服驅(qū)動(dòng)器等應(yīng)用通常都配有集成了數(shù)字位置反饋編碼器的電機(jī)
2021-11-10 09:38:57494 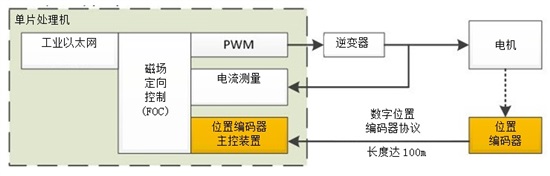
電子發(fā)燒友網(wǎng)站提供《Sin/Cos編碼器與Sitara AM437x的連接參考設(shè)計(jì).zip》資料免費(fèi)下載
2022-09-06 11:31:471 如何將位置編碼器主協(xié)議集成入Sitara?處理器應(yīng)用
2022-11-02 08:16:190 首先,讓我們來(lái)看下包含位置編碼器的系統(tǒng)層面方塊圖——見(jiàn)圖1。諸如伺服驅(qū)動(dòng)器等應(yīng)用通常都配有集成了數(shù)字位置反饋編碼器的電機(jī)。位置編碼作為傳感器,能夠精準(zhǔn)測(cè)量電機(jī)軸的角度(以度為單位)或線(xiàn)性軸(以微米為單位)的距離。
2023-04-12 09:14:16999 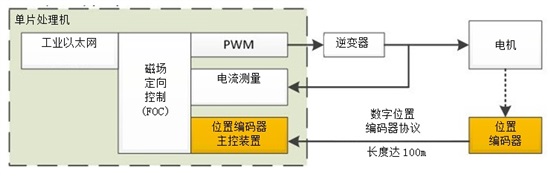
編碼器是什么?編碼器有哪些分類(lèi)及應(yīng)用;編碼器是什么?在數(shù)字信號(hào)處理和通信系統(tǒng)中,編碼器是一種重要的設(shè)備,用于將原始數(shù)據(jù)轉(zhuǎn)換為字符序列或二進(jìn)制碼序列。編碼器是一種可以同時(shí)測(cè)量物體位置和方向的蒿精度
2023-05-18 11:08:473142 
增量型編碼器和絕對(duì)值編碼器是兩種常見(jiàn)的位置控制裝置,它們?cè)诳刂?b class="flag-6" style="color: red">位置方面有著不同的工作原理和特點(diǎn)。雖然它們都可以用于位置控制,但是在某些方面存在差異。首先,增量型編碼器是通過(guò)檢測(cè)位置變化的增量來(lái)確定
2023-08-18 14:43:50477 
編碼器分為旋轉(zhuǎn)編碼器和線(xiàn)性編碼器兩種。旋轉(zhuǎn)編碼器用于檢測(cè)旋轉(zhuǎn)位置和速度,而線(xiàn)性編碼器用于檢測(cè)直線(xiàn)位置和速度。
2023-12-22 09:20:04381 
編碼器零點(diǎn)位置怎么看 要確定編碼器的零點(diǎn)位置,可以通過(guò)以下幾種方式進(jìn)行觀(guān)察: 1. 物理標(biāo)記點(diǎn):一些編碼器在其旋轉(zhuǎn)軸上具有專(zhuān)門(mén)的物理標(biāo)記點(diǎn),例如凹槽或凸起。通過(guò)觀(guān)察軸上的標(biāo)記點(diǎn),可以確定零點(diǎn)位置
2024-02-18 18:28:19737 
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論