 電子發(fā)燒友App
電子發(fā)燒友App


FPGA 非常適合精密電機(jī)控制,在這個(gè)項(xiàng)目中,我們將創(chuàng)建一個(gè)簡(jiǎn)單的電機(jī)控制程序,在此基礎(chǔ)上可以構(gòu)建更復(fù)雜的應(yīng)用。
介紹
我們可以用一個(gè)簡(jiǎn)單的 8 位微控制器來(lái)控制電機(jī),輸出一個(gè)簡(jiǎn)單的脈寬調(diào)制波形。然而,當(dāng)想要進(jìn)行精密或高級(jí)電機(jī)控制時(shí),沒(méi)有什么比 FPGA 的確定性和實(shí)時(shí)響應(yīng)更好的了。接口的靈活性還使得可以通過(guò)單個(gè)設(shè)備控制多個(gè)電機(jī),從而提供更加集成的解決方案。
首先,我們將學(xué)習(xí)一些有關(guān)電機(jī)控制理論的知識(shí),并創(chuàng)建一個(gè)簡(jiǎn)單的示例。我們都知道,我們可以通過(guò)PWM信號(hào)來(lái)驅(qū)動(dòng)直流電機(jī)并控制其速度。然而,高效、精確地驅(qū)動(dòng)它需要對(duì)電機(jī)控制理論有更多的了解。
電機(jī)
不管你信不信,我在大學(xué)最喜歡的課程之一是控制理論。在該模塊中,我們研究了交流電機(jī)和直流電機(jī),了解理論和實(shí)際用例。有多種類型的交流電機(jī)由交流電源供電,可分為同步電機(jī)和感應(yīng)電機(jī)。例如,交流電機(jī)通常用于泵和壓縮機(jī)。
直流電機(jī)分為有刷電機(jī)和無(wú)刷電機(jī)兩種。在兩種類型中,有刷是最容易驅(qū)動(dòng)的,因?yàn)樗鼈冎恍枰粋€(gè)電源。在有刷直流電機(jī)中,電刷向連接有轉(zhuǎn)子和線圈的換向器提供電流。電流在線圈中感應(yīng)出電場(chǎng),該電場(chǎng)被外部磁體(定子)排斥。為了確保旋轉(zhuǎn),換向器的設(shè)計(jì)使得電流反向流動(dòng)以確保連續(xù)旋轉(zhuǎn)。
第二種類型的直流電機(jī)是無(wú)刷電機(jī),它們的驅(qū)動(dòng)稍微復(fù)雜一些,因?yàn)樗鼈儧](méi)有換向器。相反,磁體安裝在轉(zhuǎn)子上,線圈纏繞在定子周圍,這樣線圈的電流就可以從外部控制和排序。
兩者中最容易控制的是有刷直流電機(jī),所以我們就以這類電機(jī)為例。
脈寬調(diào)制驅(qū)動(dòng)
使用 PWM 驅(qū)動(dòng)電機(jī)的理論是,可以控制電機(jī)得到的平均電壓,從而控制其速度。在 PWM 信號(hào)占空比為 100% 時(shí),電機(jī)處于滿電壓并全速運(yùn)行。如果提供 10% 的占空比,電機(jī)就會(huì)以其全速的 10% 運(yùn)行。
然而,為了有效地運(yùn)行電機(jī),我們需要正確確定 PWM 周期。直流電機(jī)具有串聯(lián)電感和串聯(lián)電阻,這意味著電機(jī)將充當(dāng)?shù)屯?a href="http://www.asorrir.com/tags/濾波器/" target="_blank">濾波器。頻率削減為
其中時(shí)間常數(shù)由 L/R 給出 - 我們可以從電機(jī)數(shù)據(jù)表中獲得這些值。
因此,為了確保穩(wěn)定的速度,我們需要選擇高于電機(jī)頻率截止的 PWM 頻率,以確保觀察到直流分量。
因此,我們要選擇一個(gè)至少是截止頻率 5 倍的頻率。
FPGA
為了開(kāi)始這個(gè)項(xiàng)目,我們首先要?jiǎng)?chuàng)建一個(gè)針對(duì) FPGA 板的硬件設(shè)計(jì)。
開(kāi)始創(chuàng)建一個(gè)新項(xiàng)目
為項(xiàng)目命名
選擇 RTL 項(xiàng)目但不指定來(lái)源
創(chuàng)建項(xiàng)目后,創(chuàng)建一個(gè)新的框圖
從“板”選項(xiàng)卡將系統(tǒng)時(shí)鐘拉到框圖上
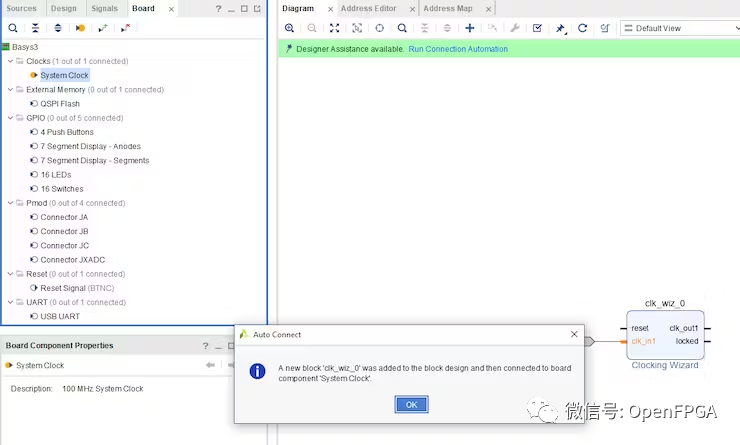
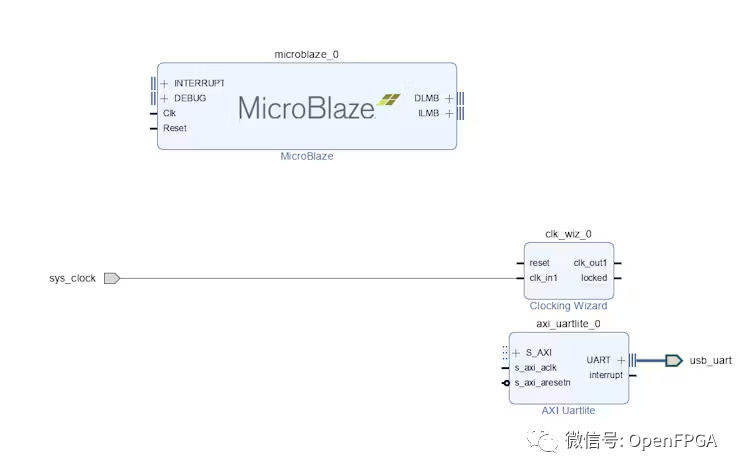
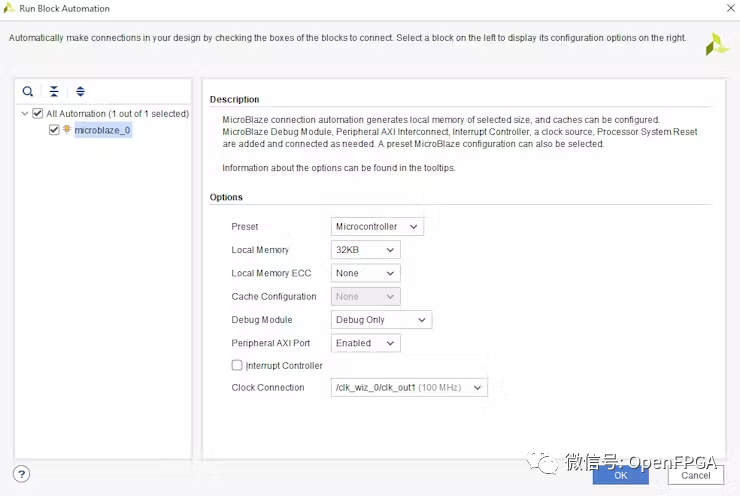
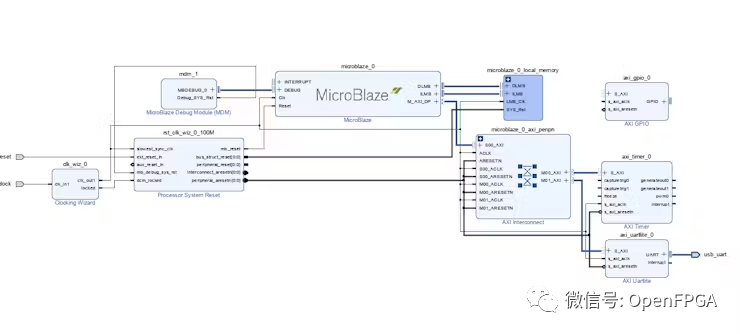
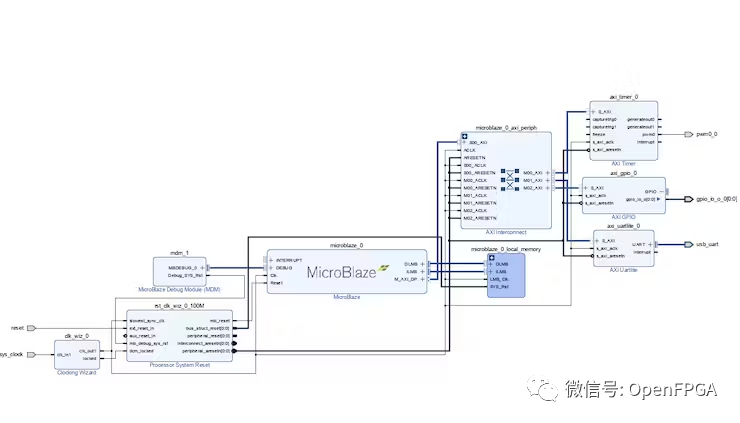
從 IP 庫(kù)添加 MicroBlaze 處理器
運(yùn)行塊自動(dòng)化連接,選擇本地內(nèi)存大小為32KB并取消選中中斷控制器
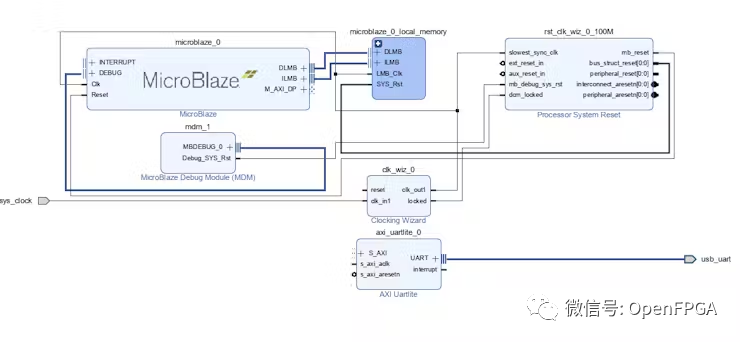
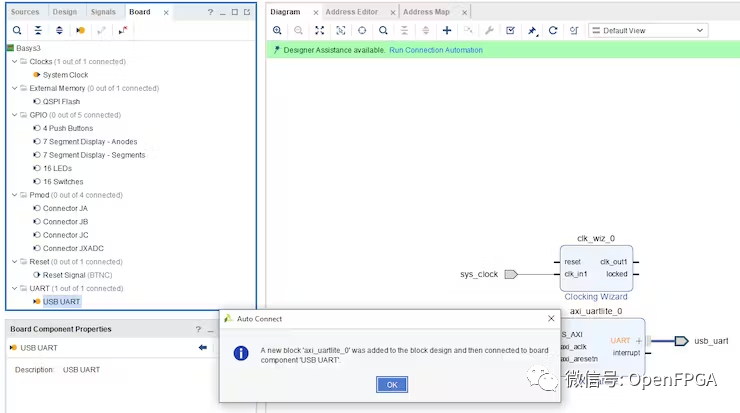
添加 AXI 定時(shí)器
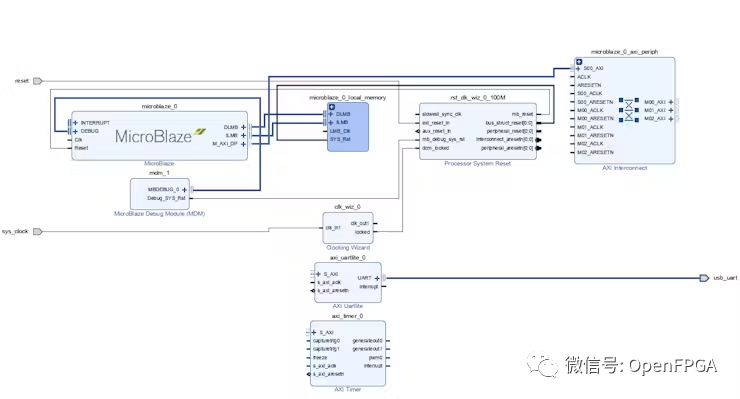
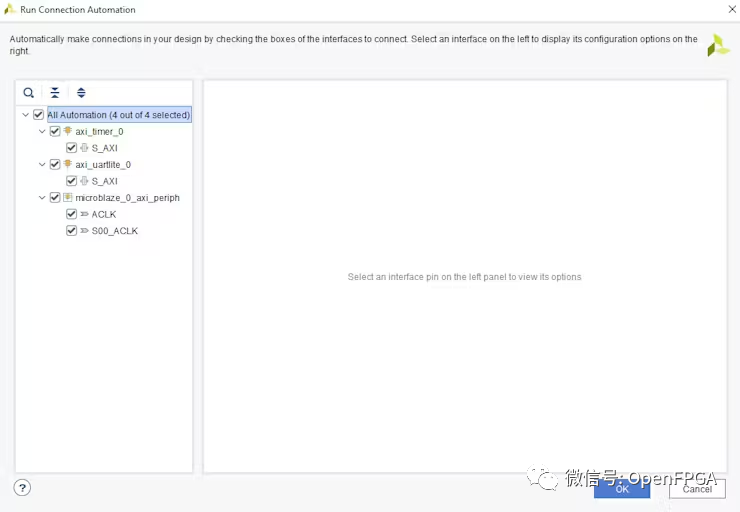
運(yùn)行連接自動(dòng)化
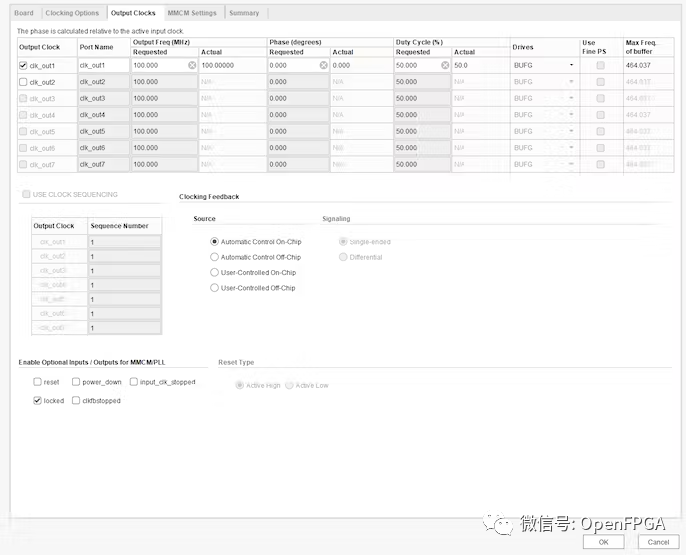
打開(kāi)時(shí)鐘向?qū)Р⑷∠x擇復(fù)位輸入
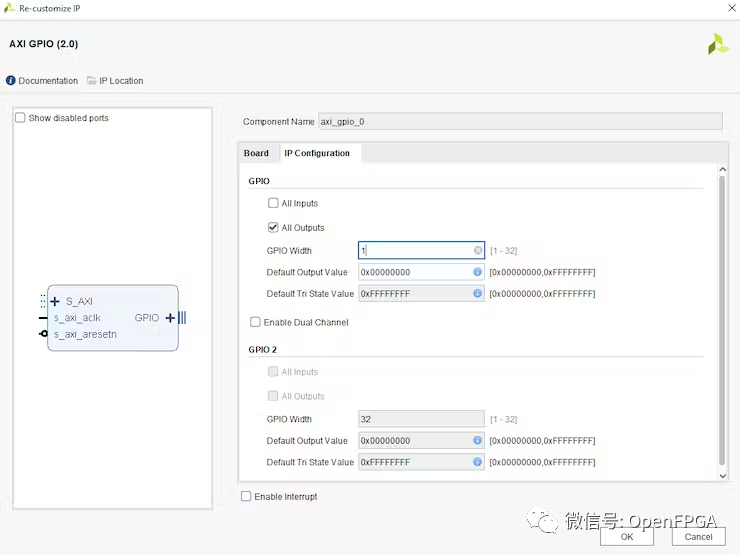
添加 GPIO
重新定制GPIO為1位寬,僅輸出
選擇 GPIO 輸出和 AXI 定時(shí)器 PWM 并將其設(shè)引出
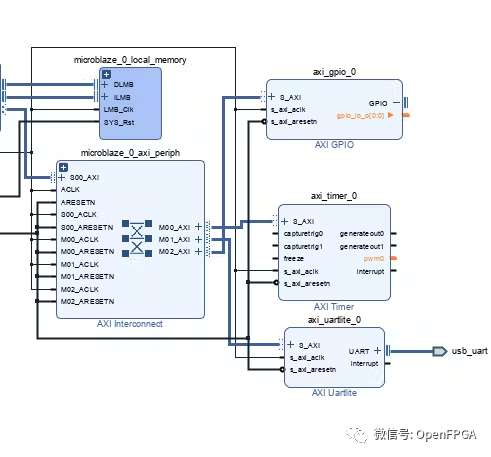
完成后應(yīng)如下所示。
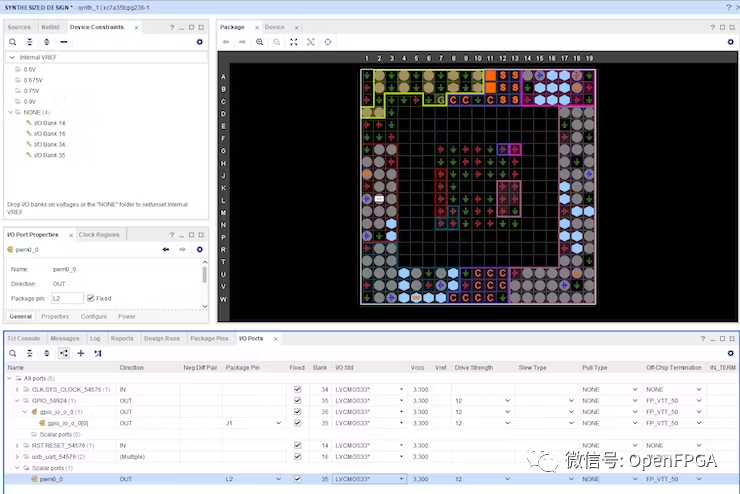
綜合完成后,我們可以打開(kāi)綜合視圖并將 IO 分配給 GPIO 和定時(shí)器輸出 - 對(duì)于 GPIO,引腳是 J1,對(duì)于 PWM,引腳是 L2
構(gòu)建比特流并導(dǎo)出平臺(tái)
vitis設(shè)計(jì)
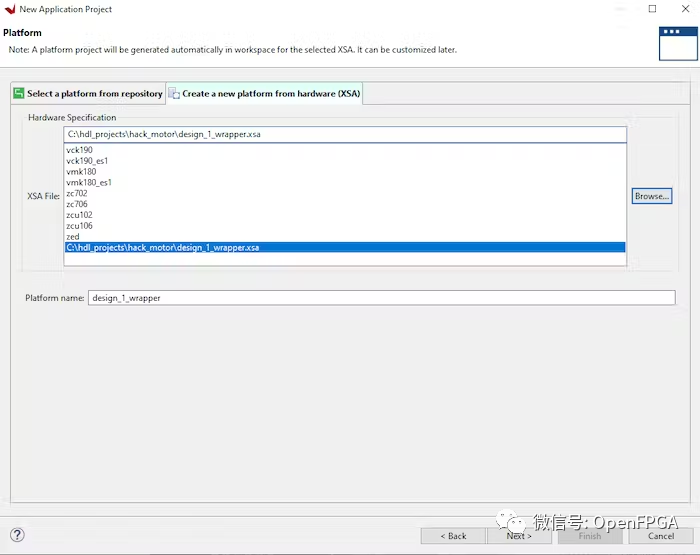
打開(kāi)Vitis創(chuàng)建一個(gè)新的應(yīng)用程序項(xiàng)目并選擇剛剛導(dǎo)出的XSA。
輸入項(xiàng)目名稱
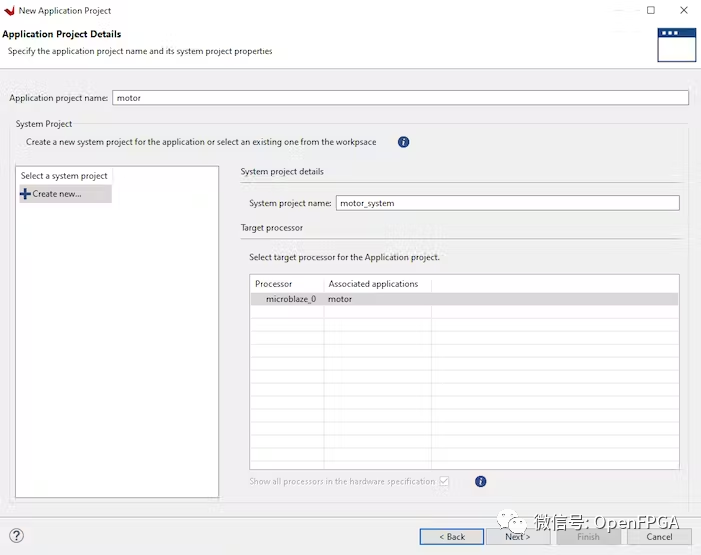
選擇獨(dú)立
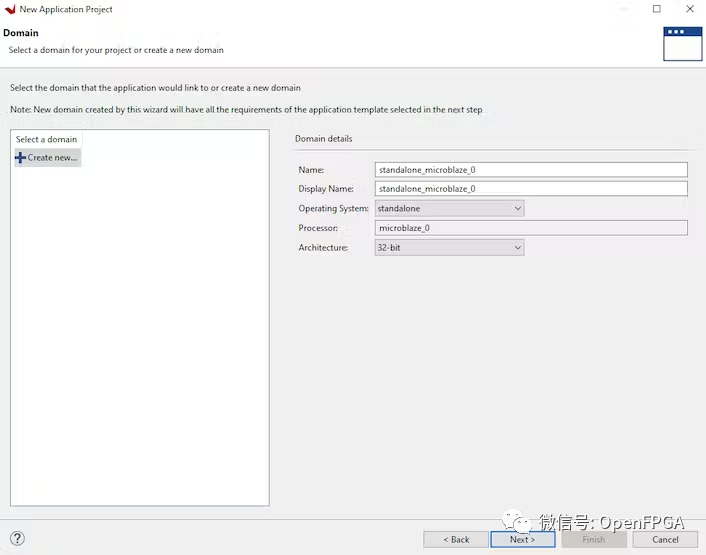
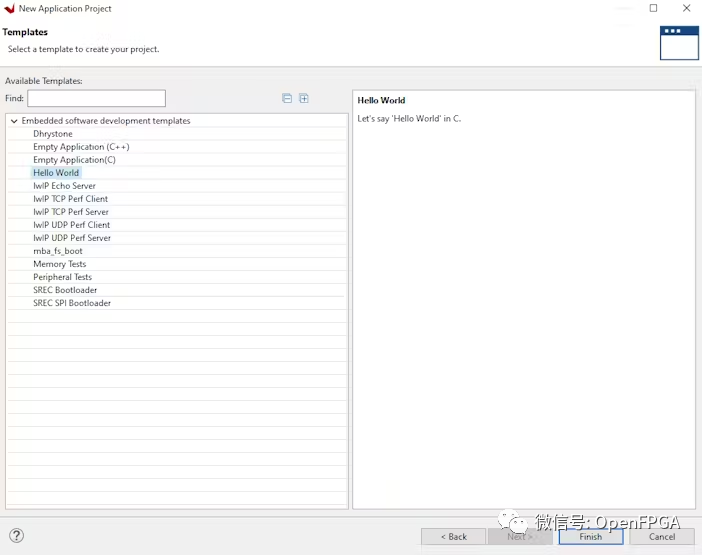
創(chuàng)建一個(gè)新的 hello world 應(yīng)用程序
應(yīng)用軟件非常簡(jiǎn)單,我們將根據(jù)所需的 PWM 周期以及所需的占空比配置 AXI 定時(shí)器。
?
#include?#include?"platform.h" #include?"xil_printf.h" #include?"xtmrctr.h" #define?TMRCTR_DEVICE_ID????????XPAR_TMRCTR_0_DEVICE_ID #define?PWM_PERIOD??????????????1000000????/*?PWM?period?in?(500?ms)?*/ #define?TMRCTR_0????????????????0????????????/*?Timer?0?ID?*/ #define?TMRCTR_1????????????????1????????????/*?Timer?1?ID?*/ #define?CYCLE_PER_DUTYCYCLE?????10???????????/*?Clock?cycles?per?duty?cycle?*/ #define?MAX_DUTYCYCLE???????????100??????????/*?Max?duty?cycle?*/ #define?DUTYCYCLE_DIVISOR???????2????????????/*?Duty?cycle?Divisor?*/ XTmrCtr?TimerCounterInst; void?display_menu() { //Clear?the?screen xil_printf("?33[2J"); //Display?the?main?menu xil_printf("******************************************* "); xil_printf("****??????www.adiuvoengineering.com????**** "); xil_printf("****??????Motor?Control?Example????????**** "); xil_printf("******************************************* "); xil_printf(" "); xil_printf("???MM10?Motor?Control??? "); xil_printf("------------------------------------------ "); xil_printf(" "); xil_printf("Select?a?Speed: "); xil_printf("??(1)???-?Stop "); xil_printf("??(2)???-?25?%? "); xil_printf("??(3)???-?33?%? "); xil_printf("??(4)???-?50?%? "); xil_printf("??(5)???-?66?%? "); xil_printf("??(6)???-?75?%? "); xil_printf("??(7)???-?100?%? "); xil_printf(" "); } void?set_pwm(u32?cycle) { ?u32?HighTime; ?XTmrCtr_PwmDisable(&TimerCounterInst); ?HighTime?=?PWM_PERIOD?*?((?float)?cycle?/?100.0?); ?XTmrCtr_PwmConfigure(&TimerCounterInst,?PWM_PERIOD,?HighTime); ?XTmrCtr_PwmEnable(&TimerCounterInst); } int?main() { ?u8??Div; ?u32?Period; ?u32?HighTime; ?char?key_input; ?u8?DutyCycle; ????init_platform(); ????print("Hello?World "); ????print("Successfully?ran?Hello?World?application"); ????XTmrCtr_Initialize(&TimerCounterInst,?TMRCTR_DEVICE_ID); ????Div?=?DUTYCYCLE_DIVISOR; ????XTmrCtr_PwmDisable(&TimerCounterInst); ?Period?=?PWM_PERIOD; ?HighTime?=?PWM_PERIOD?/?Div--; ?XTmrCtr_PwmConfigure(&TimerCounterInst,?Period,?HighTime); ?XTmrCtr_PwmEnable(&TimerCounterInst); ?while(1){ ??display_menu(); ??read(1,?(char*)&key_input,?1); ??xil_printf("Echo?%c ",key_input); ??switch?(key_input)?{ ??case?'1':?//stop ??XTmrCtr_PwmDisable(&TimerCounterInst); ??break; ??case?'2':?//25% ???xil_printf("25% "); ??DutyCycle?=?25; ??set_pwm(DutyCycle); ??break; ??case?'3':?//33% ??DutyCycle?=?33; ??set_pwm(DutyCycle); ??break; ??case?'4':?//50% ??DutyCycle?=?50; ??set_pwm(DutyCycle); ??break; ??case?'5':?//66% ??DutyCycle?=?66; ??set_pwm(DutyCycle); ??break; ??case?'6':?//75% ??DutyCycle?=?75; ??set_pwm(DutyCycle); ??break; ??case?'7':?//100% ??DutyCycle?=?100; ??set_pwm(DutyCycle); ??break; ??} ?} ????cleanup_platform(); ????return?0; }
?
當(dāng)然,我選擇的電機(jī)包含兩個(gè)霍爾效應(yīng)傳感器.旋轉(zhuǎn)方向可以通過(guò)一個(gè)霍爾效應(yīng)傳感器位于另一個(gè)霍爾效應(yīng)傳感器前面的輸出來(lái)確定。
順時(shí)針旋轉(zhuǎn)
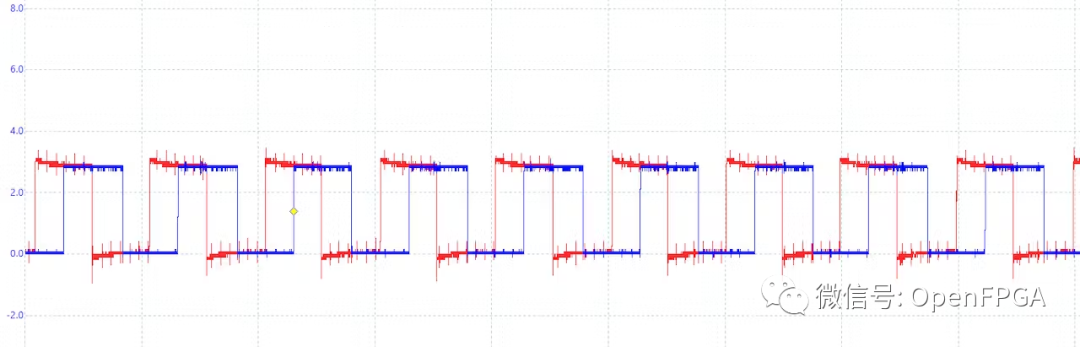
逆時(shí)針旋轉(zhuǎn)
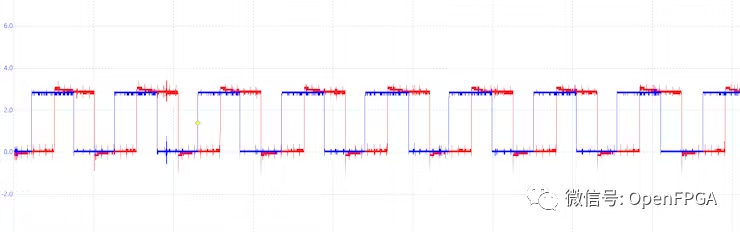
我們可以使用脈沖頻率來(lái)確定電機(jī)的速度,我們將在后面項(xiàng)目中更詳細(xì)地研究這一點(diǎn)。
審核編輯:劉清










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論