 電子發(fā)燒友App
電子發(fā)燒友App


電機(jī)位置傳感器零位偏角(即旋變零位偏角或初始角)對(duì)電機(jī)輸出扭矩的精度至關(guān)重要。于新能源150KW的驅(qū)動(dòng)電機(jī)而言,當(dāng)旋變零位偏角存在+/-2的電角度偏移,則會(huì)導(dǎo)致電機(jī)輸出扭矩在低速無(wú)弱磁區(qū)約+/-3Nm的誤差,且在高速弱磁區(qū)約+/-8Nm的誤差。
下面將從以下幾點(diǎn)介紹:電機(jī)位置傳感器零位偏角及其標(biāo)定,即旋變零位偏角及其標(biāo)定:
- 什么是旋變零位偏角?
- 為什么每臺(tái)電機(jī)都需標(biāo)定旋變零位偏角?
- 如何來(lái)標(biāo)定旋變零位偏角?
1. 旋變傳感器零位偏角
以三相永磁同步電機(jī)為例,根據(jù)電機(jī)矢量控制技術(shù), 可確定各個(gè)坐標(biāo)系。
1). 靜止坐標(biāo)系A(chǔ)BC: 定子繞組三相對(duì)稱,軸線相差120度,以定子UVW三相為參考,確定靜止坐標(biāo)系A(chǔ)BC,如圖1所示。
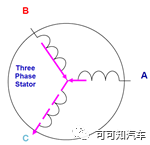
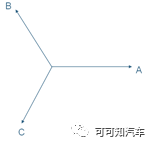
圖1.靜止坐標(biāo)系A(chǔ)BC
2). 靜止坐標(biāo)系αβ: α軸與A軸重合,超前α軸90度為β軸,如圖2所示。
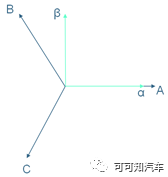
圖2. 靜止坐標(biāo)系αβ
3). 轉(zhuǎn)子同步旋轉(zhuǎn)坐標(biāo)系dq: 電機(jī)轉(zhuǎn)子磁極產(chǎn)生磁場(chǎng)的N極中心軸線作為直軸d軸;而超前直軸90度的位置定義為交軸q軸。dq軸是以轉(zhuǎn)子同步的角速度ω旋轉(zhuǎn),假設(shè)轉(zhuǎn)子逆時(shí)針旋轉(zhuǎn)的方向?yàn)檎鐖D3所示
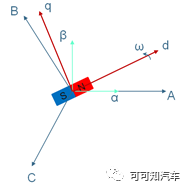
圖3. 轉(zhuǎn)子同步旋轉(zhuǎn)坐標(biāo)系dq
4). 旋變零位: 是指旋變位置傳感器零位,旋轉(zhuǎn)變壓器的正弦輸出繞組中感應(yīng)電壓最小時(shí),轉(zhuǎn)子位置就是電氣零位,輸出電壓就是零位電壓。假設(shè)當(dāng)dq軸坐標(biāo)系旋轉(zhuǎn)至d’,q’位置時(shí),旋變傳感器實(shí)際測(cè)量所輸出的角度為零,則定義d’軸位置為旋變零位,如圖4所示,旋變零位是固定不變的。
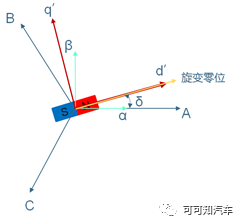
圖4.D軸與旋變零位重合示意圖
5). 旋變傳感器實(shí)際測(cè)量輸出的角度θ: 圖4中d軸與旋變零位重合,當(dāng)轉(zhuǎn)子繼續(xù)逆時(shí)針旋轉(zhuǎn),則旋變零位與d軸會(huì)形成一個(gè)夾角θ,如圖5所示,夾角θ就是旋變傳感器實(shí)際測(cè)量所輸出的角度。當(dāng)轉(zhuǎn)子旋轉(zhuǎn)至d軸與零位重合時(shí),則旋變傳感器實(shí)際測(cè)量所輸出角度θ=0度.如圖4所示。
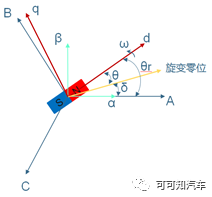
圖5.轉(zhuǎn)子位置角度示意圖
6). 旋變傳感器零位偏角δ: 為旋變零位與A軸的夾角,即是電機(jī)所需標(biāo)定的角度。如圖4所示。
7).電機(jī)轉(zhuǎn)子位置角度 θr **:**為d軸與A軸的夾角,如圖5所示。可知: θr =θ+δ。
針對(duì)目前電驅(qū)動(dòng)用永磁同步電機(jī)大都采用四對(duì)極,故上述提到的角度需轉(zhuǎn)化成對(duì)應(yīng)的電角度。
2. 為什么每臺(tái)電機(jī)都需做旋變零位偏角的標(biāo)定
根據(jù)永磁同步電機(jī)的矢量控制,為了電機(jī)輸出的力矩最大化,定子繞組產(chǎn)生電磁場(chǎng)始終與轉(zhuǎn)子永磁場(chǎng)正交,就需要準(zhǔn)確得到轉(zhuǎn)子位置角度θr,即準(zhǔn)確得到θ和δ。
對(duì)于旋變傳感器實(shí)際測(cè)量角度θ的精度,取決于旋變傳感器的電氣誤差、輸出正交軸誤差、解碼計(jì)算誤差、旋變傳感器本身的制造精度等因數(shù),在此不考慮。
對(duì)于旋變傳感器零位偏角δ的精度,理想狀態(tài)下,電機(jī)的開(kāi)發(fā)設(shè)計(jì)階段是可以確保旋變傳零位與A軸重合,即旋變零位偏角δ=0. 但實(shí)際因電機(jī)生產(chǎn)過(guò)程中,存在加工偏差和安裝偏差,導(dǎo)致旋變傳感器實(shí)際定位不一致,以至于每臺(tái)電機(jī)的旋變傳感器偏角不一致。故下線檢測(cè)時(shí)每臺(tái)電機(jī)都需要做旋變傳感器零位偏角標(biāo)定。
3. 旋變零位偏角的標(biāo)定
**3.1 **標(biāo)定方法一
當(dāng)給定某三相電流,使得UVW三相合成電流is始終指向A軸,即U相,此時(shí)電流is 產(chǎn)生的感應(yīng)磁場(chǎng)和轉(zhuǎn)子永磁體的磁場(chǎng)相互作用,使得d軸(即轉(zhuǎn)子的N極)與A相重合。此時(shí)可讀取旋變傳感器實(shí)際測(cè)量角度為,如圖6所示,則可計(jì)算出旋變傳感器零位偏角:δ=360-θ。
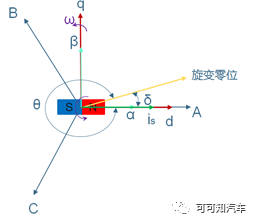
圖6.定子電流is指向A軸示意圖
根據(jù)上述的理論,在工程應(yīng)用中,可實(shí)現(xiàn)手動(dòng)標(biāo)定和自動(dòng)標(biāo)定兩種方法。
手動(dòng)標(biāo)定: 利用一個(gè)低壓直流電源和一個(gè)旋變傳感器解算設(shè)備,將電機(jī)繞組的U相接通正極,V相和W相接負(fù)極,接通電源時(shí),電機(jī)轉(zhuǎn)子旋轉(zhuǎn)到一定的位置,此時(shí),旋變傳感器解算設(shè)備讀到角度。若90 ^0^ <θ<360 ^0^ ,則旋變傳感器零位偏角:δ=360-θ; 若θ<=90 ^0^ ,則旋變傳感器零位偏角:δ=θ。
自動(dòng)標(biāo)定: 將上述提到的手動(dòng)標(biāo)定過(guò)程內(nèi)置到電機(jī)控制器內(nèi)部,電機(jī)空載,給定電機(jī)控制器DC電壓,控制U相電電流為某一值,V相和W相電流為相應(yīng)的負(fù)值,則電機(jī)會(huì)轉(zhuǎn)子至某一固定位置,A軸和d軸重合,旋變讀取的角度即為旋變零位偏角。
由于軸承摩擦力的存在和慣性的作用,上述標(biāo)定過(guò)程,都會(huì)導(dǎo)致旋變零位與A軸重合產(chǎn)生偏差,另外,因機(jī)械公差,對(duì)于一個(gè)機(jī)械旋轉(zhuǎn)的每個(gè)電周期測(cè)得的角度偏移可能會(huì)有所不同。因此,必須考慮通過(guò)為每個(gè)電周期重復(fù)標(biāo)定并計(jì)算平均角度來(lái)確定旋變零位偏角。
同理,還可通過(guò)電機(jī)控制器在電壓環(huán)中直接給β軸電壓矢量,來(lái)標(biāo)定出旋變零位偏角。
此標(biāo)定方法:方法簡(jiǎn)單,易實(shí)現(xiàn)自動(dòng)標(biāo)定。標(biāo)定出來(lái)的旋變零位偏角精度較高。
**3.2 **標(biāo)定方法二
PSM電機(jī)的扭矩方程:

當(dāng)旋變零位偏角正確,且旋變采樣正確時(shí),給定的Id、Iq時(shí),則電機(jī)輸出扭矩為T(mén);給定Id、-Iq時(shí),則電機(jī)輸出的扭矩為-T。在給定的電流下,只有當(dāng)旋變零位偏角正確時(shí),電機(jī)輸出的扭矩T最大。
上述理論,可利用電機(jī)本身的控制器和動(dòng)態(tài)測(cè)試臺(tái)架來(lái)確定旋變零位偏角的標(biāo)定:
Step1: 給電機(jī)控制供DC額定電壓,電機(jī)控制在扭矩模式;同時(shí),待標(biāo)電機(jī)被測(cè)控機(jī)拖動(dòng)到某一定速,例如3000rpm,但不能弱磁轉(zhuǎn)速區(qū),測(cè)控機(jī)記錄電機(jī)輸出扭矩;
Step2: 通過(guò)電機(jī)控制手動(dòng)給定d軸電流Id;
Step3: 標(biāo)定修改旋變零位偏角,記為
Step4: 手動(dòng)給定q軸電流Iq;
Step5: 讀取電機(jī)輸出扭,記為T(mén)+;
Step6: 手動(dòng)給定q軸電流-Iq;
Step7: 再次讀取電機(jī)輸出扭,記為T(mén)-;
Step8: 重復(fù)上述step3至Step7的操作,直到T+與T-正負(fù)對(duì)稱,絕對(duì)值相等時(shí),則旋變零位偏角標(biāo)定成功。
此標(biāo)定方法:基本靠試湊,效率低,不易實(shí)現(xiàn)自動(dòng)標(biāo)定;可用于旋變零位偏角準(zhǔn)確性的驗(yàn)證及優(yōu)化。
**3.3 **標(biāo)定方法三
采用無(wú)位置傳感器策略,計(jì)算出電機(jī)的轉(zhuǎn)子位置角度,再減去旋變實(shí)際測(cè)量的角度,可得旋變零位偏角。無(wú)位置傳感器估算轉(zhuǎn)子位置角度的策略多樣,如圖7所示為其中一種。
此標(biāo)定方法:不需借助于測(cè)控機(jī),旋變零位偏角的精度完全取決于無(wú)位置傳感器估算策略。
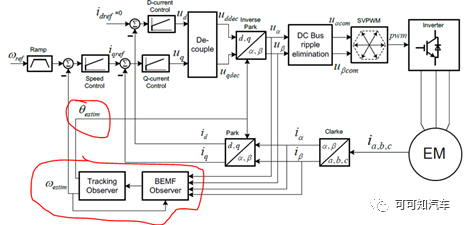
圖7. Sensor-less 的轉(zhuǎn)子位置角度估算原理框圖
**3.4 **標(biāo)定方法四
利用反電動(dòng)勢(shì)波形,來(lái)正確反應(yīng)電機(jī)轉(zhuǎn)子位置角度波形。在標(biāo)定的過(guò)程中,需要用到測(cè)控機(jī)將待標(biāo)電機(jī)拖動(dòng)到一定的轉(zhuǎn)速,這時(shí)電機(jī)會(huì)產(chǎn)生一個(gè)對(duì)應(yīng)的反電動(dòng)勢(shì)。其一,可通過(guò)外部接一個(gè)功率分析儀,來(lái)檢測(cè)反電動(dòng)勢(shì)的波形,從而推出電機(jī)轉(zhuǎn)子位置角度的波形,如圖8所示。其二,可通過(guò)軟件控制算法使得電機(jī)控制器進(jìn)入主動(dòng)短接工作狀態(tài),即三相IGBT進(jìn)入“上半橋全開(kāi)/下半橋全閉合”或“上半橋全閉合/下半橋全開(kāi)”的工作狀態(tài),電機(jī)會(huì)發(fā)熱,此時(shí)產(chǎn)生的三相電流波形,即可解算出轉(zhuǎn)子位置角度和旋變零位偏角。
此標(biāo)定方法:需借助測(cè)控機(jī),可實(shí)現(xiàn)自動(dòng)標(biāo)定。標(biāo)定出來(lái)的旋變零位偏角精度非常高。
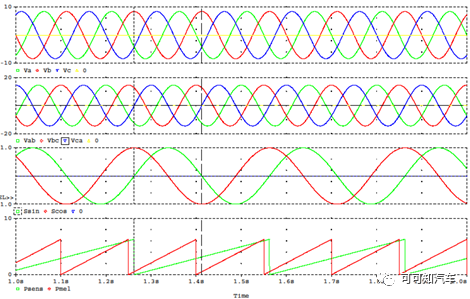
圖8.反電動(dòng)勢(shì)及其位置角度波形示意圖
以上是被常提及的四種旋變零位偏角的標(biāo)定方法,當(dāng)然還有好多其他的方式方法來(lái)標(biāo)定旋變零位偏角,其理論都源之于電機(jī)的控制模型和算法。最后,再允許我多一句廢話:熟悉電機(jī)的控制模型或算法,就更易理解各個(gè)標(biāo)定方法或策略。










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論