 電子發(fā)燒友App
電子發(fā)燒友App


來源:?袁秋華-寧波吉利羅佑發(fā)動機(jī)零部件有限公司
混合動力總成的運(yùn)行工況要遠(yuǎn)比傳統(tǒng)動力復(fù)雜,其工作模式包括純電動驅(qū)動模式、發(fā)動機(jī)驅(qū)動模式、行車充電模式、混合驅(qū)動模式、再生制動機(jī)制等工況[5],這些工況都使得發(fā)動機(jī)不斷地起停,不可避免地影響到整車各個方面的性能,比如舒適性、平順性和耐久性。近年來有不少主機(jī)廠通過采用不同的數(shù)學(xué)算法與控制策略來分析混連式動力總成系統(tǒng)發(fā)動機(jī)起停方式對整車舒適性和平順性的影響[6-11]。另有部分主機(jī)廠研究了不同曲軸和活塞停機(jī)位置對于發(fā)動機(jī)起動速度的影響[12-16],而不同起停控制策略對于混動變速器耐久性的影響很少見到報道。
本文以某混合動力變速器電機(jī)輸入軸斷裂問題為研究對象,分析了電機(jī)輸入軸的斷口形貌和金相組織,排除材料本身結(jié)構(gòu)缺陷的因素;開發(fā)了一個能夠識別混動試驗過程中異常工況的工具軟件,發(fā)現(xiàn)P1 電機(jī)的短時連續(xù)起動策略會導(dǎo)致雙質(zhì)量飛輪共振并圈;在此基礎(chǔ)上,建立了傳動系統(tǒng)一維動力學(xué)CAE 計算模型,分析了不同起動參數(shù)對雙質(zhì)量飛輪共振并圈和起動NVH 的影響。最后提出了一種優(yōu)化的混合動力起動控制策略,解決了雙質(zhì)量飛輪的共振并圈現(xiàn)象,進(jìn)而解決了電機(jī)輸入軸的斷裂問題。本文的研究方法和結(jié)論對混合動力系統(tǒng)開發(fā)過程中出現(xiàn)的類似問題有重要的指導(dǎo)意義和工程價值。
1 問題描述
1.1 系統(tǒng)構(gòu)型
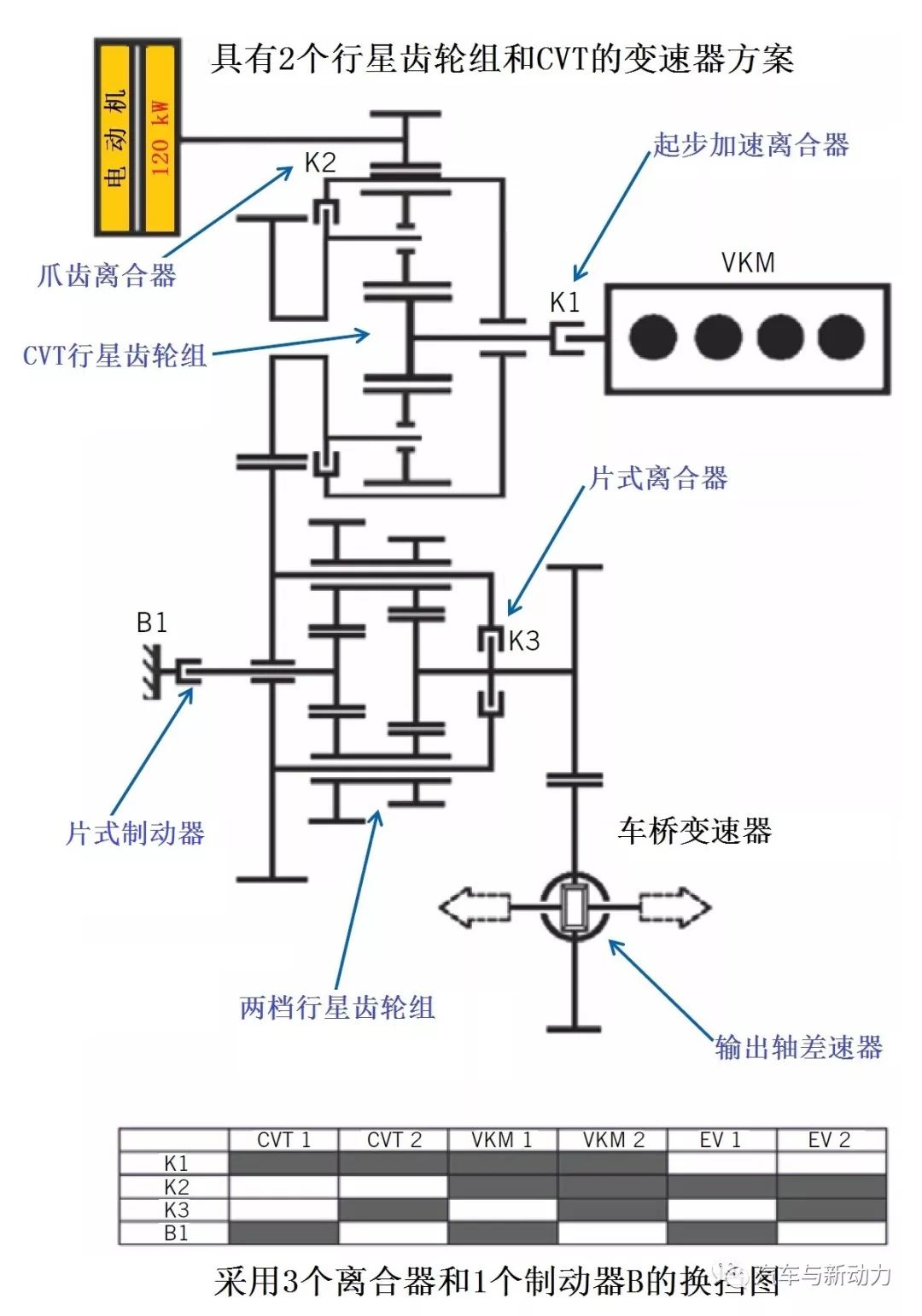
本文研究的混動變速器是一款擁有雙電機(jī)的3擋DHT 變速器,P1 發(fā)電機(jī)輔助發(fā)動機(jī)起停與充電,P2驅(qū)動電機(jī)提供強(qiáng)勁動力。該3擋變速器構(gòu)型如圖1 所示,通過雙排行星齒輪、雙制動器、雙離合器來實現(xiàn)擋位切換與串并聯(lián)模式切換。
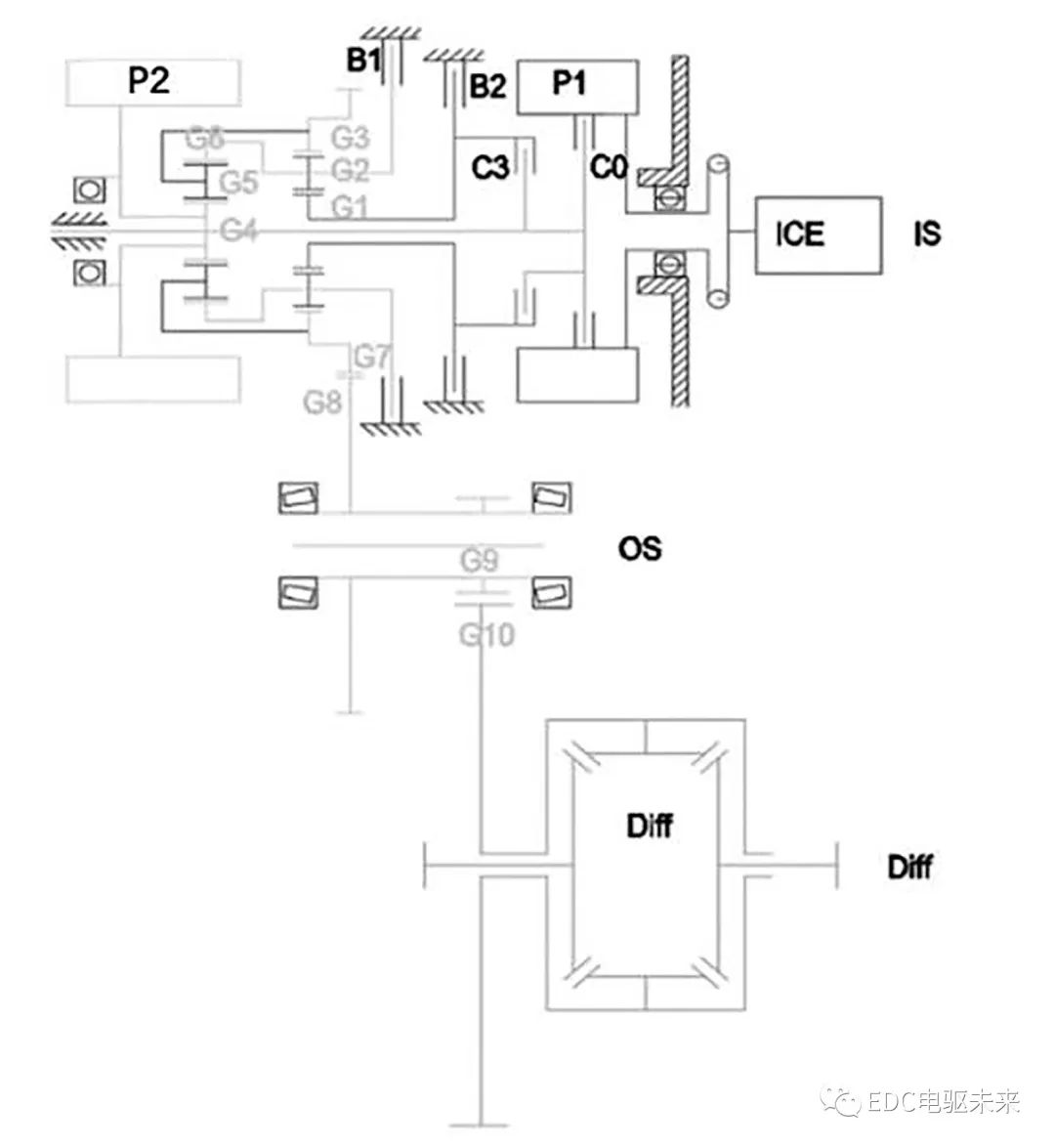
圖1 變速器構(gòu)型圖(ICE-發(fā)動機(jī);DMF-雙質(zhì)量飛輪;C0&C3-離合器;B1&B2-制動器;P1-發(fā)電機(jī);P2-電動機(jī);OS-輸出軸;Diff-差速器)
發(fā)動機(jī)輸出動力經(jīng)過雙質(zhì)量飛輪減振后,經(jīng)由P1 發(fā)電機(jī)、后排行星齒輪系的太陽輪輸入,前排行星齒輪系齒圈輸出。在起動工況中,P1 電機(jī)發(fā)出一定轉(zhuǎn)矩通過雙質(zhì)量飛輪拖動發(fā)動機(jī)起動;1/2/3 擋時,B1 制動器/B2 制動器/C3 離合器分別工作,實現(xiàn)不同速比的輸出。
1.2 問題描述
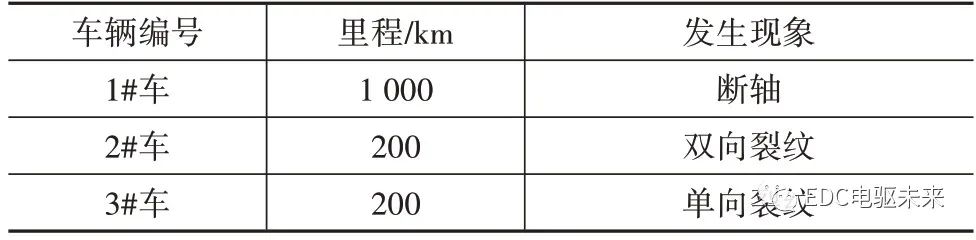
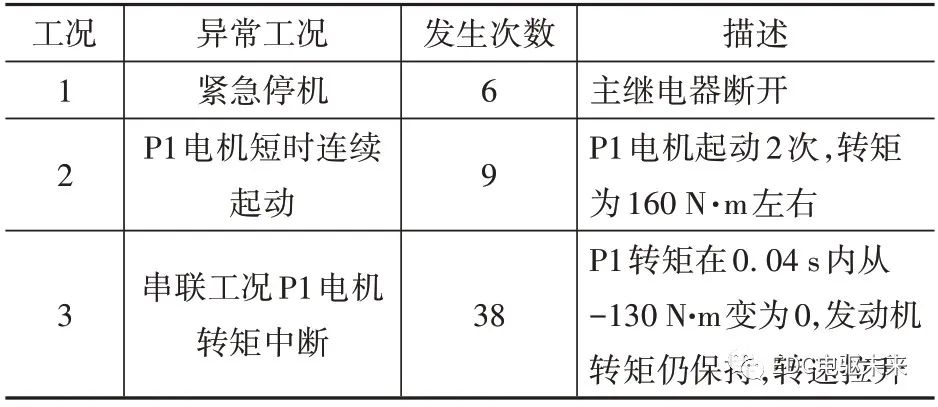
上述混合動力總成搭載整車進(jìn)行耐久試驗時,存在電機(jī)輸入軸斷裂失效現(xiàn)象,發(fā)生失效的車輛信息統(tǒng)計見表1,軸斷裂如圖2 所示,斷裂位置主要位于輸入軸頸部及花鍵齒根根部。
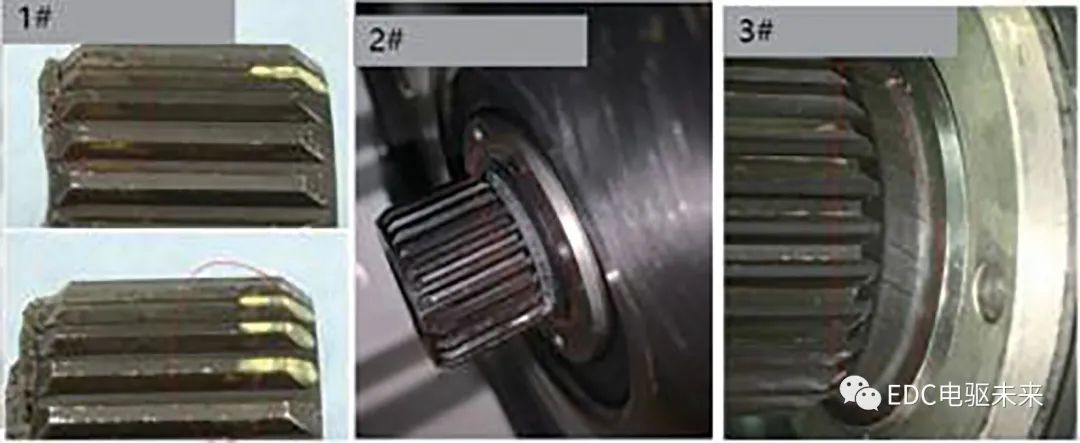
圖2 整車失效軸圖片
表1 整車失效信息統(tǒng)計
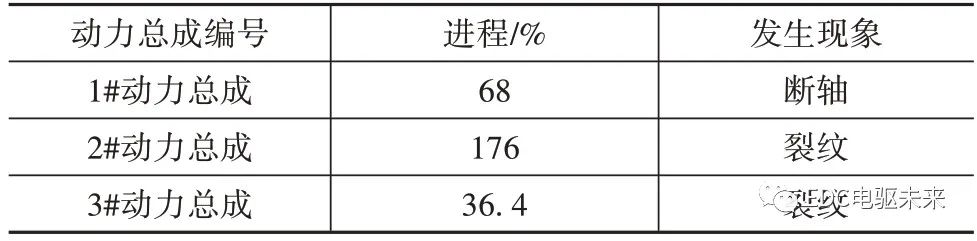
該混合動力總成在循環(huán)耐久臺架試驗中也多次出現(xiàn)電機(jī)輸入軸裂紋,失效現(xiàn)象與整車上相同,臺架失效信息統(tǒng)計見表2。
表2 臺架失效信息統(tǒng)計
2 原因分析
電機(jī)輸入軸的斷裂主要有如下幾種原因:(1)材料內(nèi)部金相組織不合格,有雜質(zhì)或者微裂紋導(dǎo)致材料機(jī)械強(qiáng)度不達(dá)標(biāo);(2)輸入軸運(yùn)轉(zhuǎn)時受到很大的沖擊載荷;(3)設(shè)計強(qiáng)度不夠。因此,本文中電機(jī)輸入軸斷裂的原因分析主要包括如下幾個方面:斷口形貌分析,確定斷裂形式;分析材料金相組織是否滿足要求;檢測材料斷裂強(qiáng)度是否滿足要求;最后對試驗工況進(jìn)行分析,確認(rèn)工況中是否存在明顯的沖擊載荷。
2.1 斷口分析
金屬斷口多出現(xiàn)在金屬組織最薄弱的部位,是金屬斷裂后形成的一堆相互匹配的斷裂表面及其外觀形貌[17]。斷裂分為韌性斷裂、脆性斷裂、疲勞斷裂、應(yīng)力腐蝕斷裂、蠕變斷裂、液態(tài)金屬脆化、氫脆等類型[18]。圖3 展示的是臺架試驗出現(xiàn)裂紋的斷口圖,可以發(fā)現(xiàn)裂紋呈現(xiàn)扭轉(zhuǎn)形式分布在整個圓周上,與旋轉(zhuǎn)軸在一個方向上呈現(xiàn)45°夾角。裂紋同時來自軸頸根部及花鍵根部,兩個位置裂紋無明顯關(guān)聯(lián),獨(dú)立產(chǎn)生。

圖3 裂紋實圖
電機(jī)輸入軸材料為某型號合金鋼,其力學(xué)參數(shù)如表3 所示。按照GB/T 1814—1979 鋼材斷口檢測法對斷口進(jìn)行檢測,發(fā)現(xiàn)輸入軸斷口部位形貌為解理斷裂,如圖4 所示,在軸芯部觀察到酒窩狀特征,結(jié)合其斷口裂紋實圖及短時失效特點(diǎn),認(rèn)為該電機(jī)輸入軸斷裂現(xiàn)象屬于瞬時沖擊脆性斷裂,非變速器中常見的疲勞斷裂。
表3 電機(jī)輸入軸力學(xué)參數(shù)
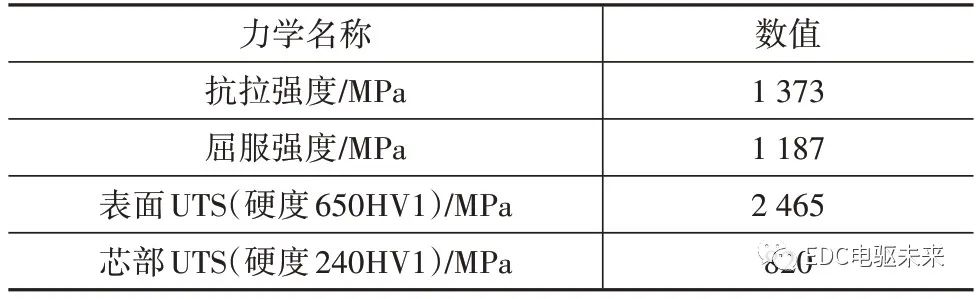
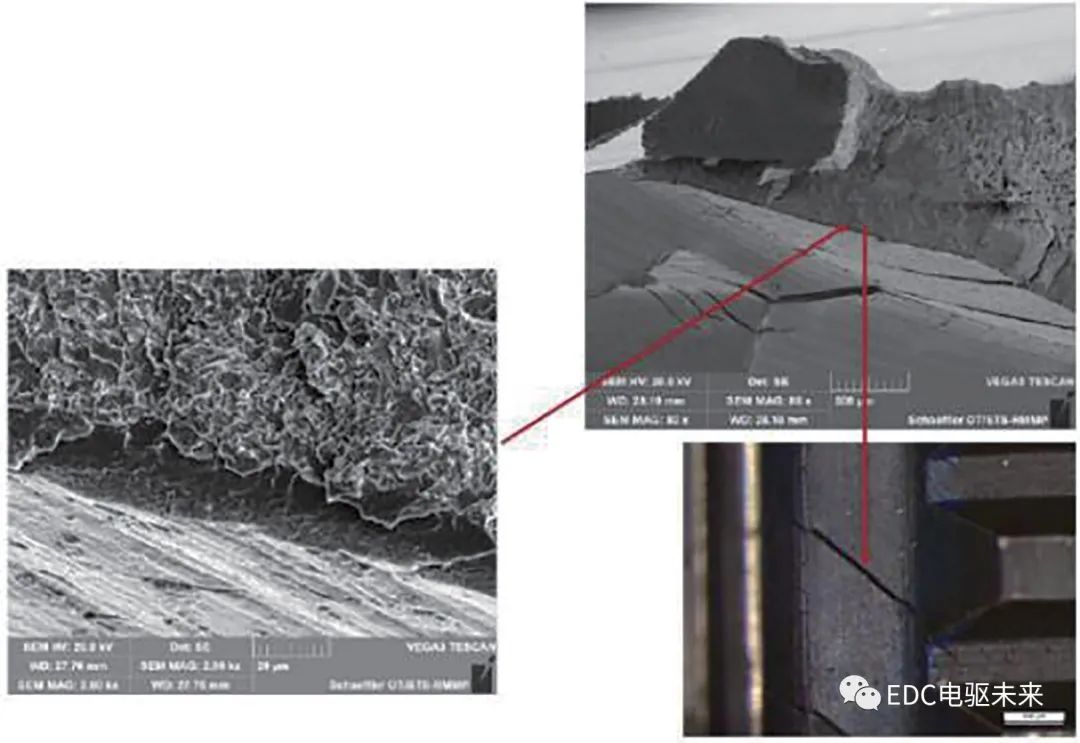
圖4 斷口檢測結(jié)果
2.2 金相組織分析
截取電機(jī)輸入軸斷裂位置附近材料,在光學(xué)顯微鏡下觀察其材料組織形態(tài),并進(jìn)行維氏硬度及氮化層深度NHD 無損測量,測量的組織形態(tài)如圖5 所示,軸表面組織為珠光體和鐵素體,白色層厚度為17.2-22.6 μm。軸芯部組織為貝氏體、鐵素體和珠光體。對氮化層深度NHD 檢測結(jié)果進(jìn)行分析,未發(fā)現(xiàn)明顯異常,如表4所示。由此進(jìn)一步驗證了2.1節(jié)斷口分析得出脆性斷裂的結(jié)論。
表4 維氏硬度和NHD測量結(jié)果
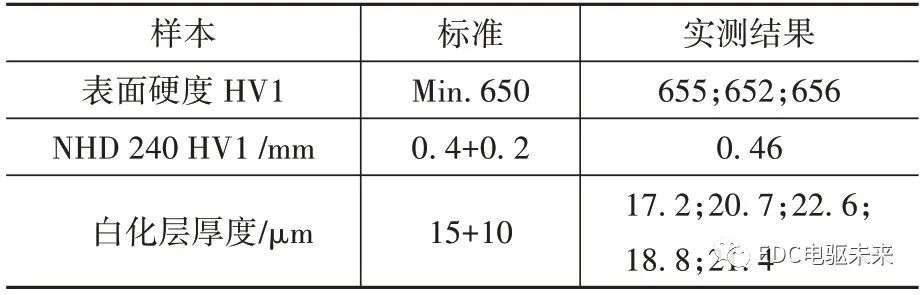
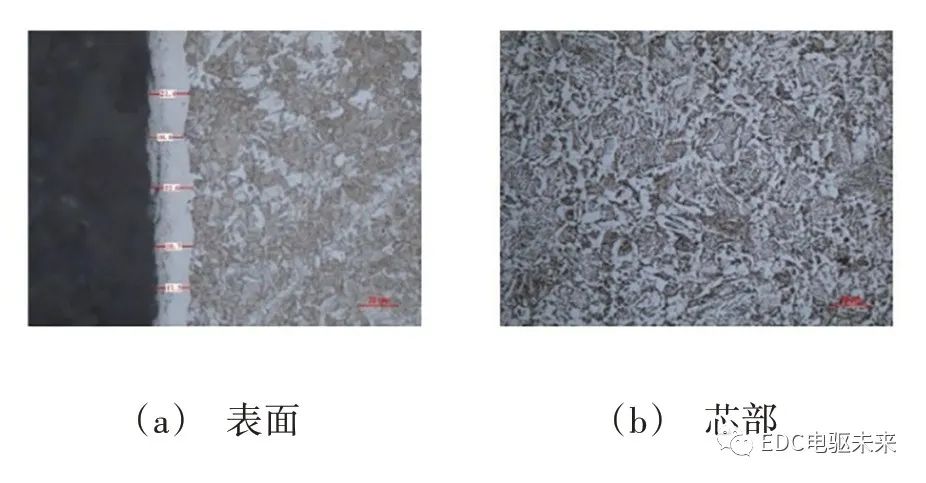
圖5 金相組織檢測圖
2.3 機(jī)械性能分析 
為了驗證輸入軸強(qiáng)度是否合格,進(jìn)行了軸的極限轉(zhuǎn)矩試驗。固定P1 電機(jī)轉(zhuǎn)子內(nèi)部的離合器片,從雙質(zhì)量飛輪連接花鍵處施加轉(zhuǎn)矩,直至破壞,結(jié)果如圖6 所示。由圖可見,屈服點(diǎn)約為2 049 N·m,斷裂強(qiáng)度約為3 000 N·m,滿足設(shè)計要求。
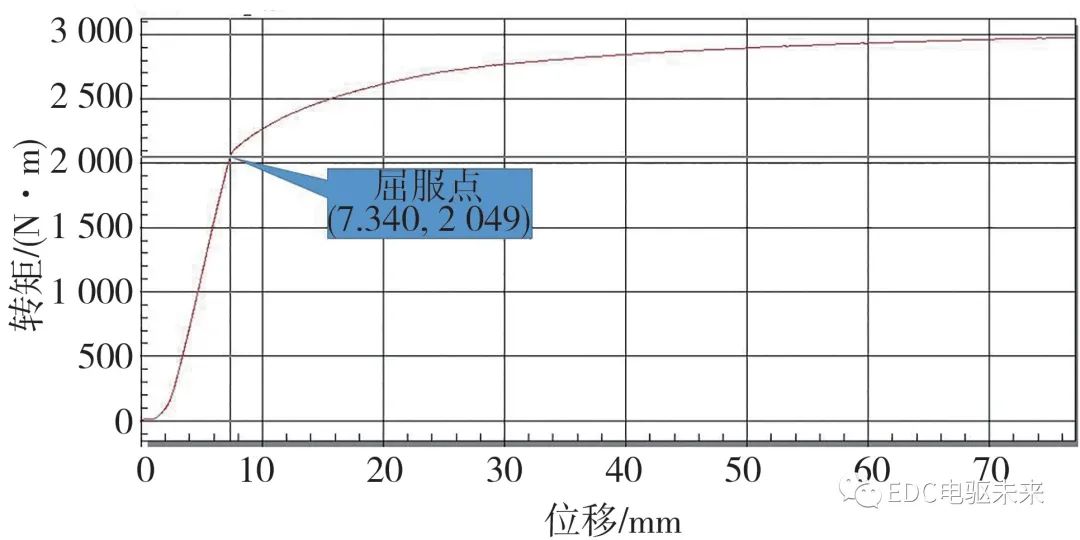
圖6 屈服試驗結(jié)果
對輸入軸進(jìn)行極限轉(zhuǎn)矩脈動試驗,負(fù)載在發(fā)動機(jī)輸出力矩放大1.5 倍的安全系數(shù)范圍之間變化,循環(huán)周期為3×106次,顯微鏡觀察,未發(fā)現(xiàn)裂紋,如圖7 所示。由此可以推斷出,輸入軸斷裂失效的發(fā)生,并非產(chǎn)品內(nèi)部存在材料缺陷、產(chǎn)品表面存在初始裂紋或者強(qiáng)度不合格,有可能是瞬態(tài)大負(fù)荷轉(zhuǎn)矩沖擊造成的瞬時脆性斷裂,因此,需要分析試驗過程中是否存在沖擊負(fù)荷。
2.4 試驗工況分析 ?
圖8 為搭載該變速器的動力總成試驗臺架照片。對動力總成臺架24 天的實測數(shù)據(jù)進(jìn)行處理分析,以識別是否存在緊急起停、電機(jī)轉(zhuǎn)矩突變等異常情況。但動總試驗臺架數(shù)據(jù)達(dá)到數(shù)10 GB,用人工處理的方式顯然不可行。因此,開發(fā)了一個處理混合動力試驗數(shù)據(jù)的軟件工具,該工具能夠自動讀取臺架記錄的數(shù)據(jù)文件,對發(fā)動機(jī)、P1 電機(jī)和P2 電機(jī)的轉(zhuǎn)速和轉(zhuǎn)矩進(jìn)行處理分析,識別出驅(qū)動系統(tǒng)轉(zhuǎn)矩或轉(zhuǎn)速的突變點(diǎn),并按照大小進(jìn)行排序;采用這個工具,共發(fā)現(xiàn)3 種最有可能對電機(jī)輸入軸產(chǎn)生大轉(zhuǎn)矩沖擊的工況,如表5 所示,分別是緊急停機(jī)工況、P1電機(jī)短時連續(xù)起動工況、串聯(lián)工況P1 電機(jī)轉(zhuǎn)矩突然中斷工況,后續(xù)將對這些工況參數(shù)進(jìn)行詳細(xì)分析。
表5 臺架異常工況
2.4.1 雙質(zhì)量飛輪相對擺角測試
雙質(zhì)量飛輪(DMF)是汽車傳動系統(tǒng)中最重要的緩沖減振零部件,其在傳統(tǒng)動力中的特性已經(jīng)被廣泛而充分地研究[19-24]。雙質(zhì)量飛輪一端連接發(fā)動機(jī),另一端連接變速器,中間用弧形彈簧及阻尼元件緩沖,如圖9 所示。本文中的雙質(zhì)量飛輪主級與發(fā)動機(jī)通過螺栓剛性連接,次級與P1 電機(jī)通過花鍵連接。當(dāng)通過P1 電機(jī)起動發(fā)動機(jī)時,從P1 電機(jī)發(fā)出一定力矩驅(qū)動飛輪次級慣量,通過彈簧緩沖后驅(qū)動飛輪主級慣量旋轉(zhuǎn),發(fā)動機(jī)在一定轉(zhuǎn)速下噴油點(diǎn)火,從而起動發(fā)動機(jī);當(dāng)P1 電機(jī)發(fā)電時,發(fā)動機(jī)驅(qū)動飛輪主級慣量旋轉(zhuǎn),經(jīng)過彈簧緩沖后驅(qū)動飛輪次級,進(jìn)而拖動P1 電機(jī)發(fā)電。顯然,一旦雙質(zhì)量飛輪失去緩沖作用,即彈簧被壓縮到并圈,則系統(tǒng)中必然會形成強(qiáng)烈的瞬態(tài)沖擊。本文在分析上述3 個異常工況的同時,在臺架復(fù)現(xiàn)了這些工況,并用高精度霍爾轉(zhuǎn)速傳感器,測試了主次級飛輪的角位移及相對擺角,以分析這些工況下雙質(zhì)量飛輪是否并圈,測試原理如圖10 所示。本文所用雙質(zhì)量飛輪參數(shù)如表6 所示,該雙質(zhì)量飛輪彈簧單邊最大壓縮行程為64°,最小自由行程約為3.75°,因此設(shè)定該雙質(zhì)量飛輪單邊行程達(dá)到(64+4)×90%=61.2°,飛輪就有并圈的風(fēng)險。
表6 飛輪參數(shù)
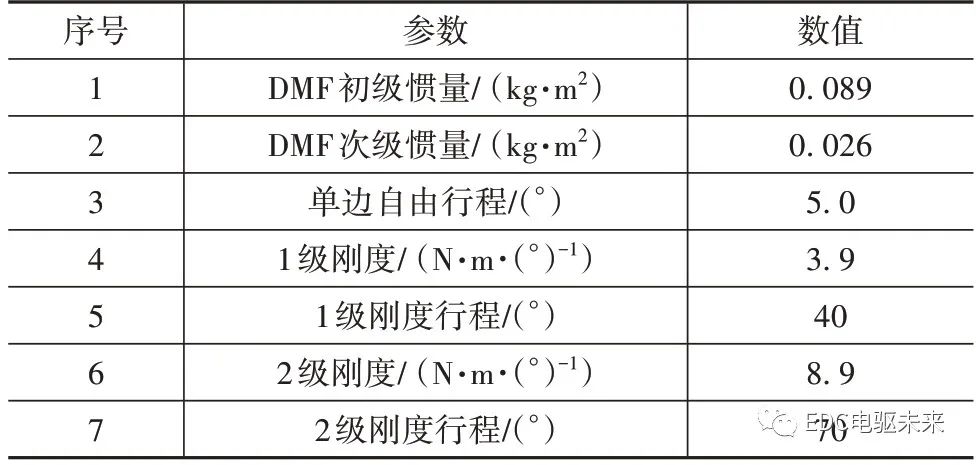
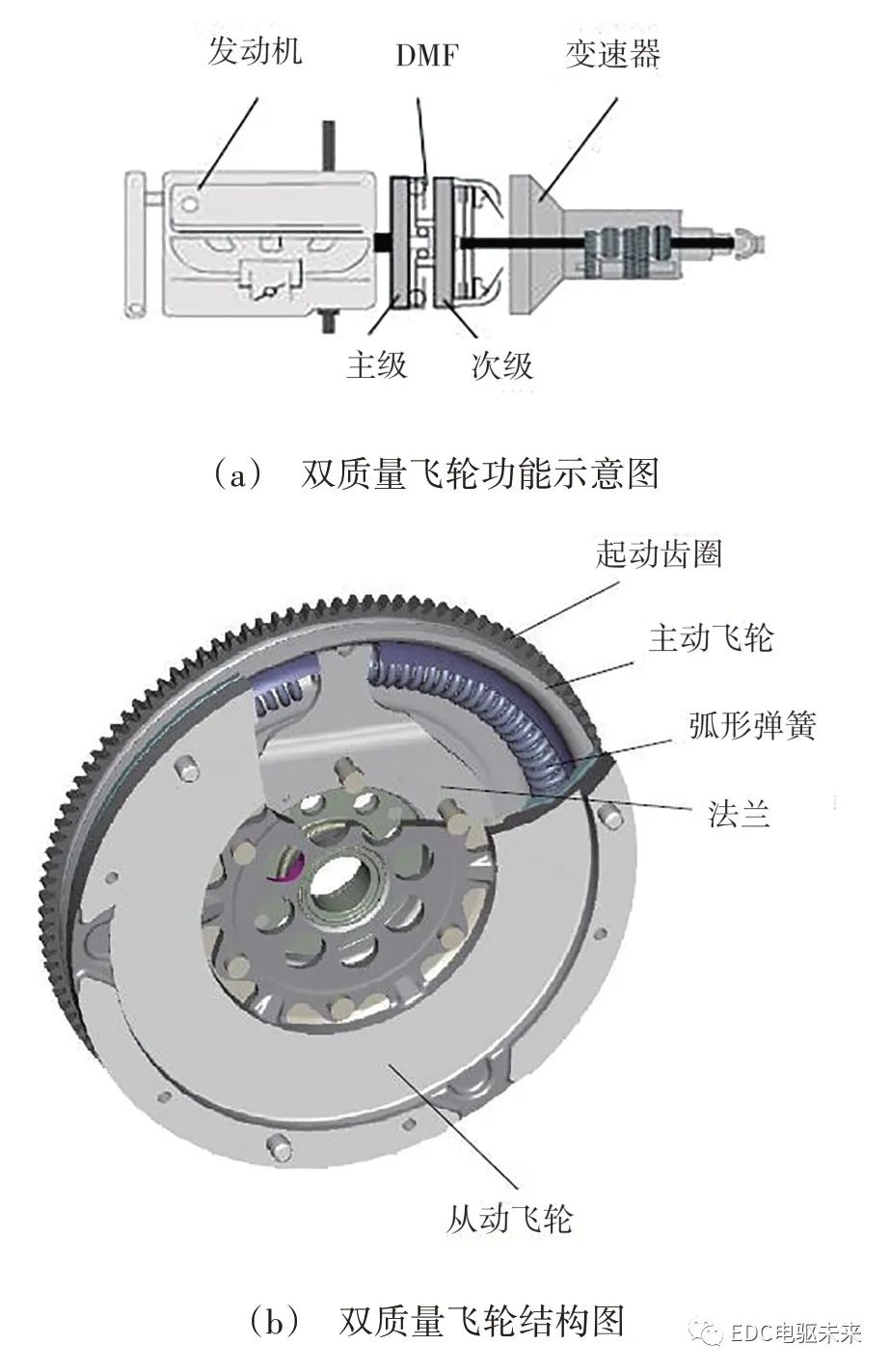
圖9 雙質(zhì)量飛輪結(jié)構(gòu)及功能
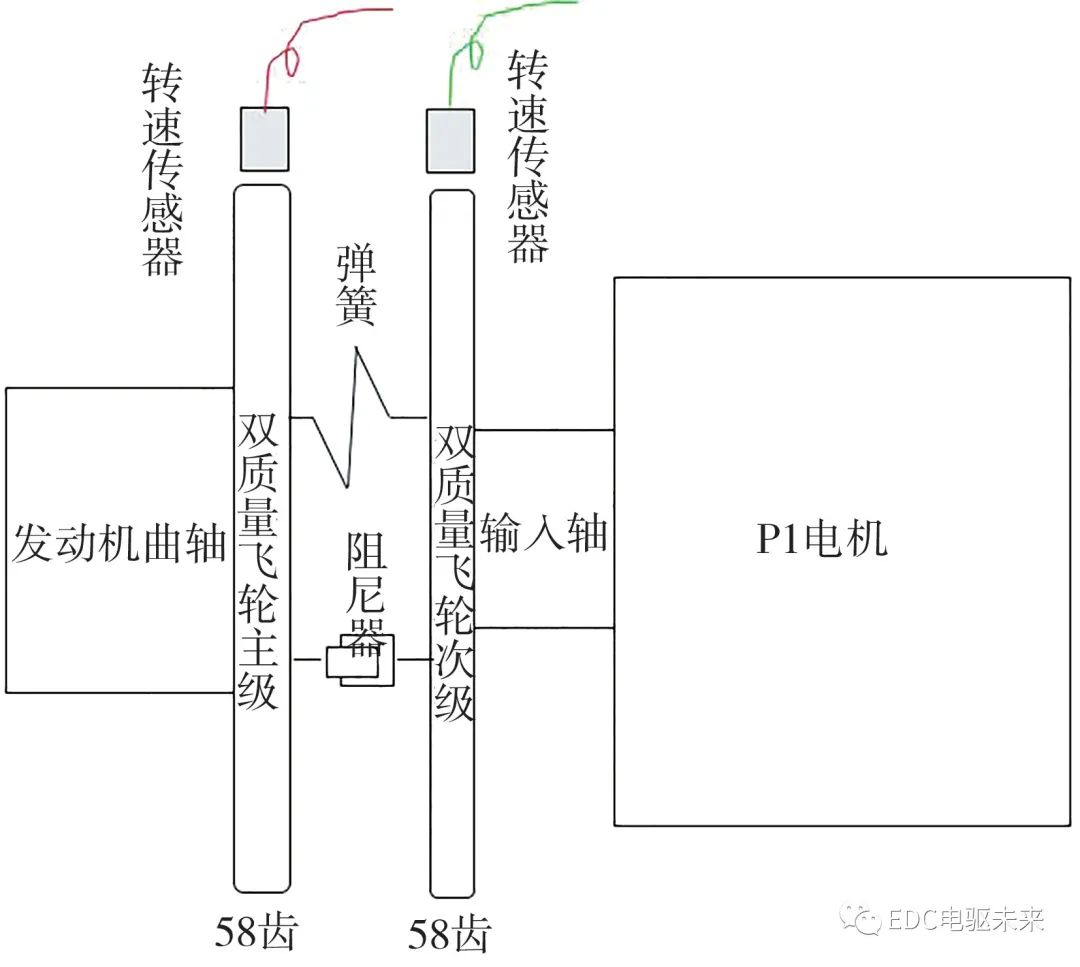
圖10 雙質(zhì)量飛輪主次級轉(zhuǎn)速測試示意圖
2.4.2 緊急停機(jī)工況分析
圖11 所示為表5 描述的緊急停機(jī)工況,發(fā)動機(jī)轉(zhuǎn)速、P1 和P2 電機(jī)轉(zhuǎn)速從1 532 s 左右開始下降,在1 536 s 左右都變?yōu)?,由此判斷動總在該處異常停機(jī)。測試此過程中雙質(zhì)量飛輪的轉(zhuǎn)速波動如圖12所示,可以看出雙質(zhì)量飛輪的單邊最大擺角為56.3°,小于61°,因此,雙質(zhì)量飛輪并圈風(fēng)險較小。
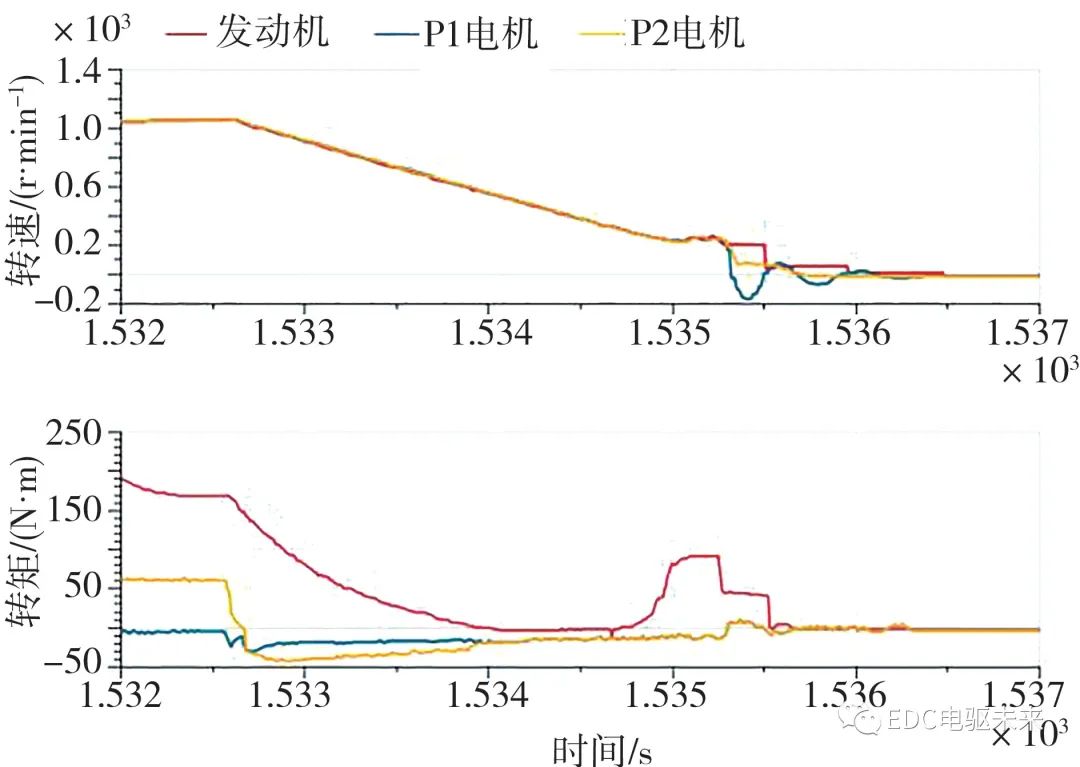
圖11 緊急停機(jī)工況標(biāo)定數(shù)據(jù)
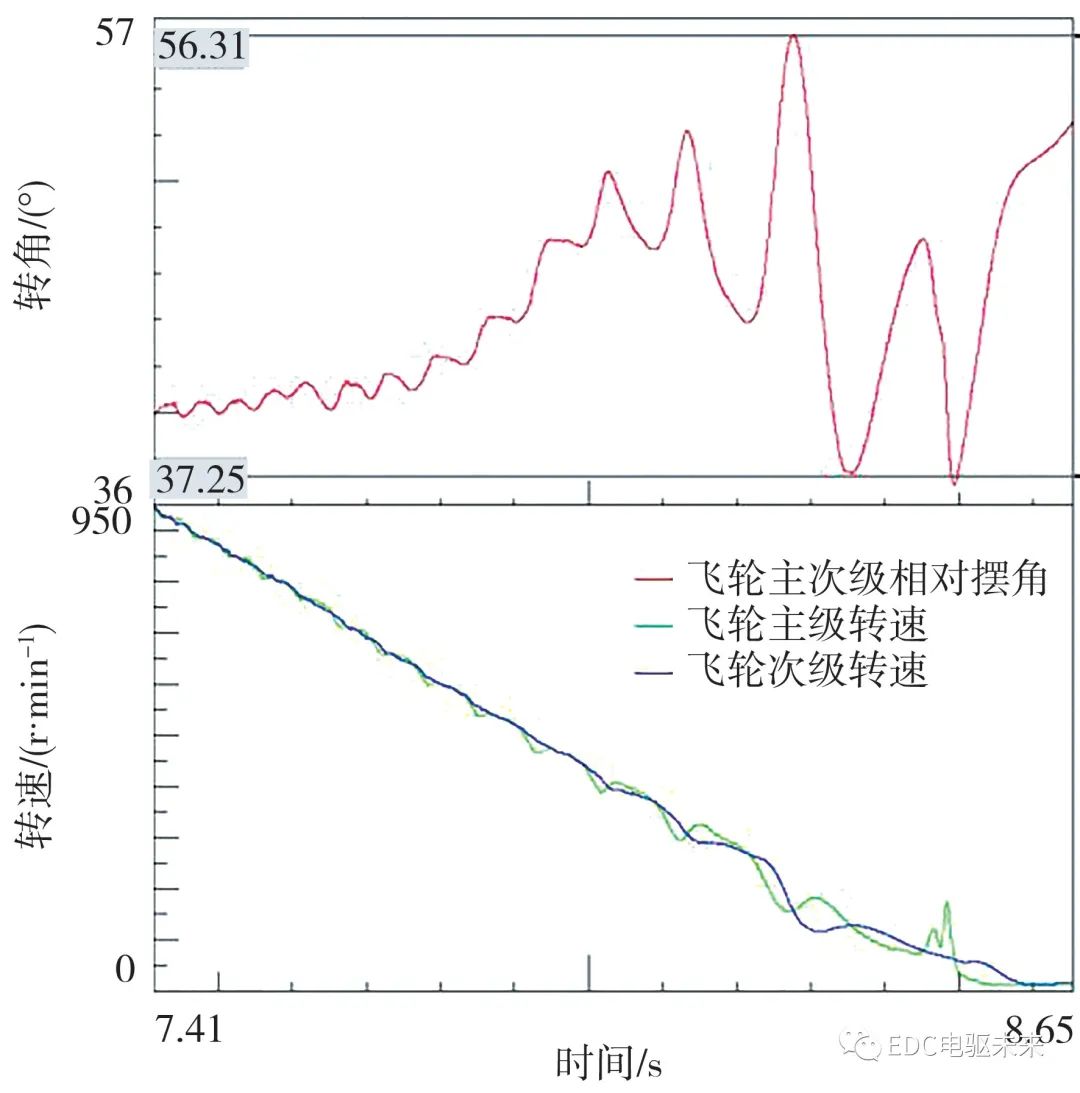
圖12 緊急停機(jī)工況轉(zhuǎn)速實測數(shù)據(jù)
2.4.3 P1電機(jī)短時連續(xù)起動工況分析
圖13為P1電機(jī)短時連續(xù)起動工況數(shù)據(jù),可以看到在此工況下P1 電機(jī)發(fā)出160 N·m 左右的轉(zhuǎn)矩,經(jīng)過DMF 彈簧緩沖后拖動發(fā)動機(jī)起動,0.2 s 后P1 電機(jī)轉(zhuǎn)矩異常中斷,第1次起動失敗,1 s后進(jìn)行第2次起動。此時可以觀察到發(fā)動機(jī)轉(zhuǎn)速在100-500 r/min反復(fù)波動,隨后被快速拖動到2 000 r/min 以上,發(fā)動機(jī)起動成功。經(jīng)過計算,該雙質(zhì)量飛輪的1 階頻率為11.6 Hz,其共振轉(zhuǎn)速約為60×11.6/1.5=460 r/min,因此曲軸在100-500 r/min 之間反復(fù)波動導(dǎo)致雙質(zhì)量飛輪系統(tǒng)的共振,進(jìn)而導(dǎo)致雙質(zhì)量飛輪彈簧并圈,從而使其失去減振效果而產(chǎn)生沖擊。圖14 為臺架復(fù)現(xiàn)P1 電機(jī)短時連續(xù)起動現(xiàn)象測得的雙質(zhì)量飛輪相對擺角,可以發(fā)現(xiàn)其單邊壓縮已經(jīng)達(dá)到68°,此時彈簧已經(jīng)并圈。
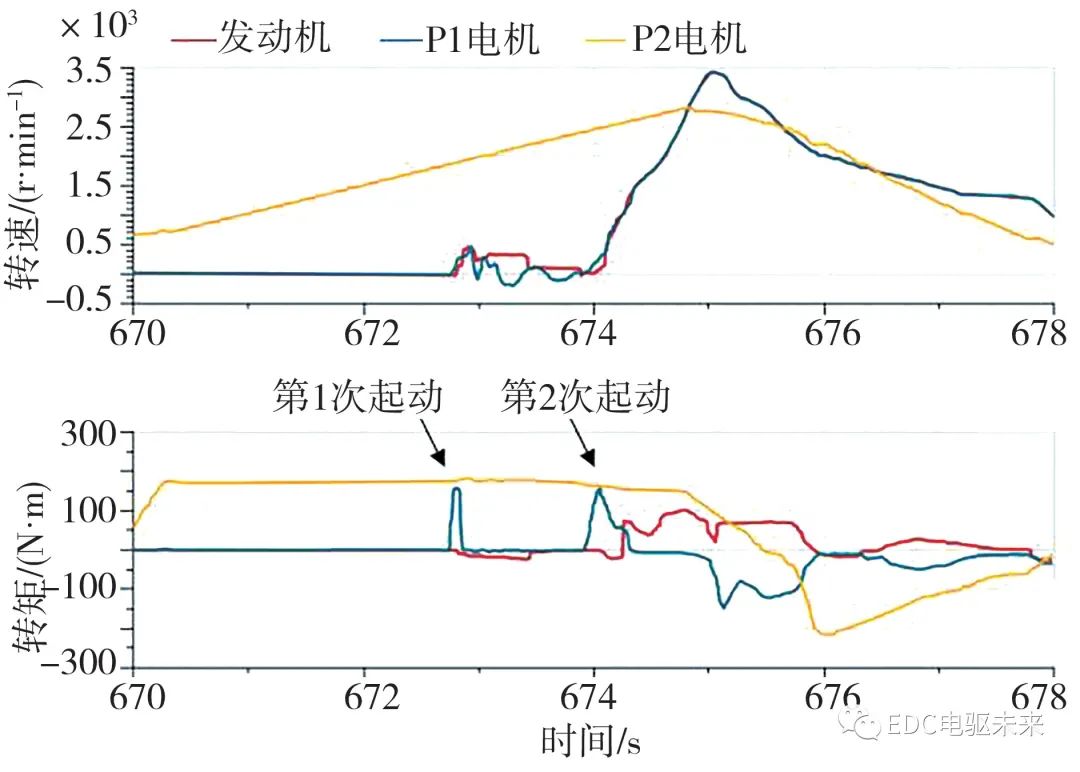
圖13 短時連續(xù)起動工況標(biāo)定數(shù)據(jù)
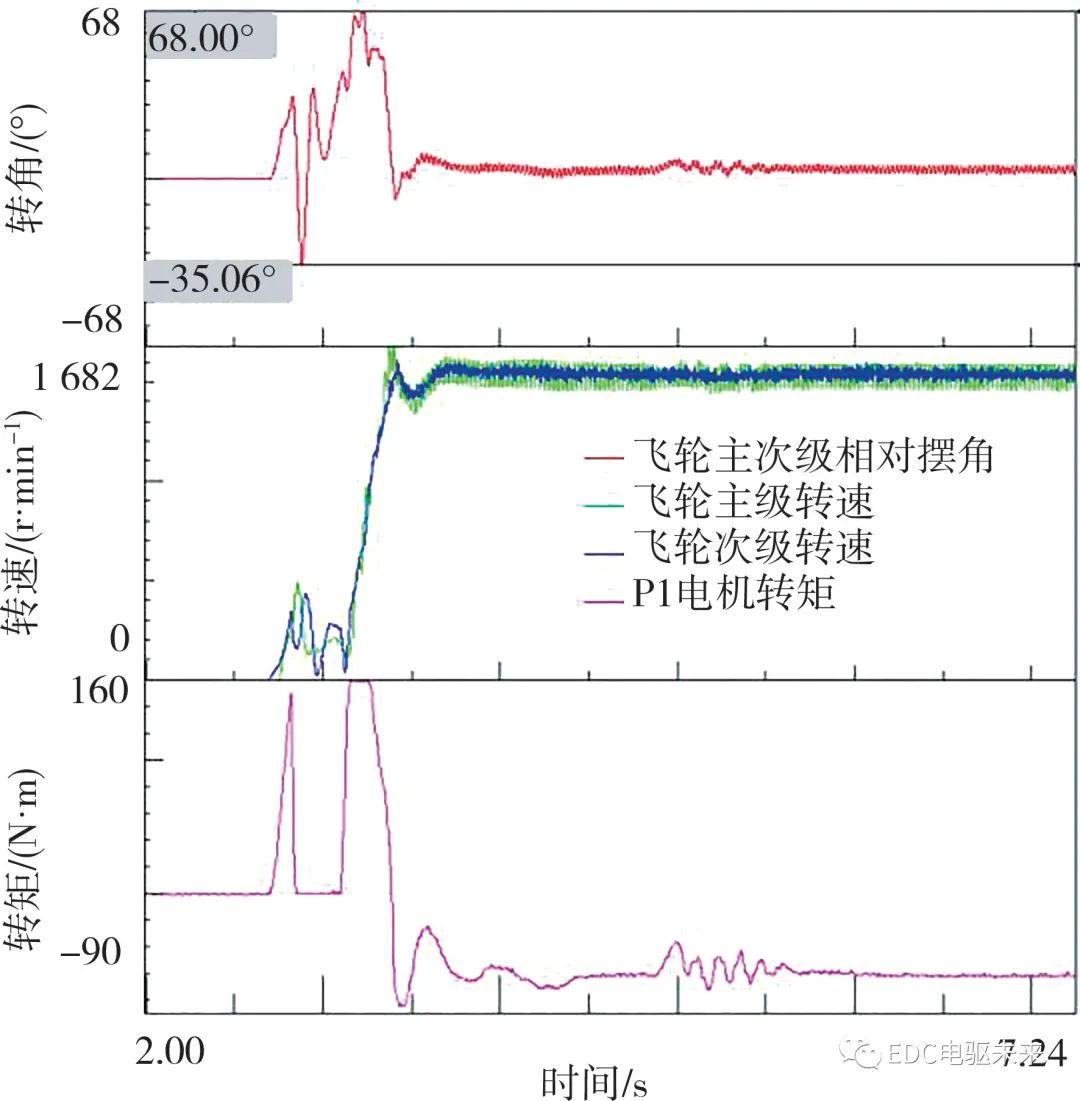
圖14 短時連續(xù)起動工況轉(zhuǎn)速實測數(shù)據(jù)
在混合動力整車的行駛過程中,發(fā)動機(jī)總是頻繁地起停助力或充電,顯然發(fā)動機(jī)存在起動失火的可能,尤其是冷機(jī)起動時,燃油霧化較差,容易導(dǎo)致發(fā)動機(jī)起動點(diǎn)火失敗。基于此,進(jìn)一步在臺架上模擬斷缸起動發(fā)動機(jī)(模擬高寒環(huán)境起動過程),測得的雙質(zhì)量飛輪相對擺角如圖15 所示。從圖可以看出,當(dāng)某一缸失火時持續(xù)起動會導(dǎo)致發(fā)動機(jī)轉(zhuǎn)速在100-1 100 r/min 轉(zhuǎn)速區(qū)間來回波動,波動幅度最大為1 000 r/min,波動持續(xù)0.6 s。此時雙質(zhì)量飛輪主次級單邊相對擺角達(dá)到76°,顯然,雙質(zhì)量飛輪彈簧已經(jīng)并圈。
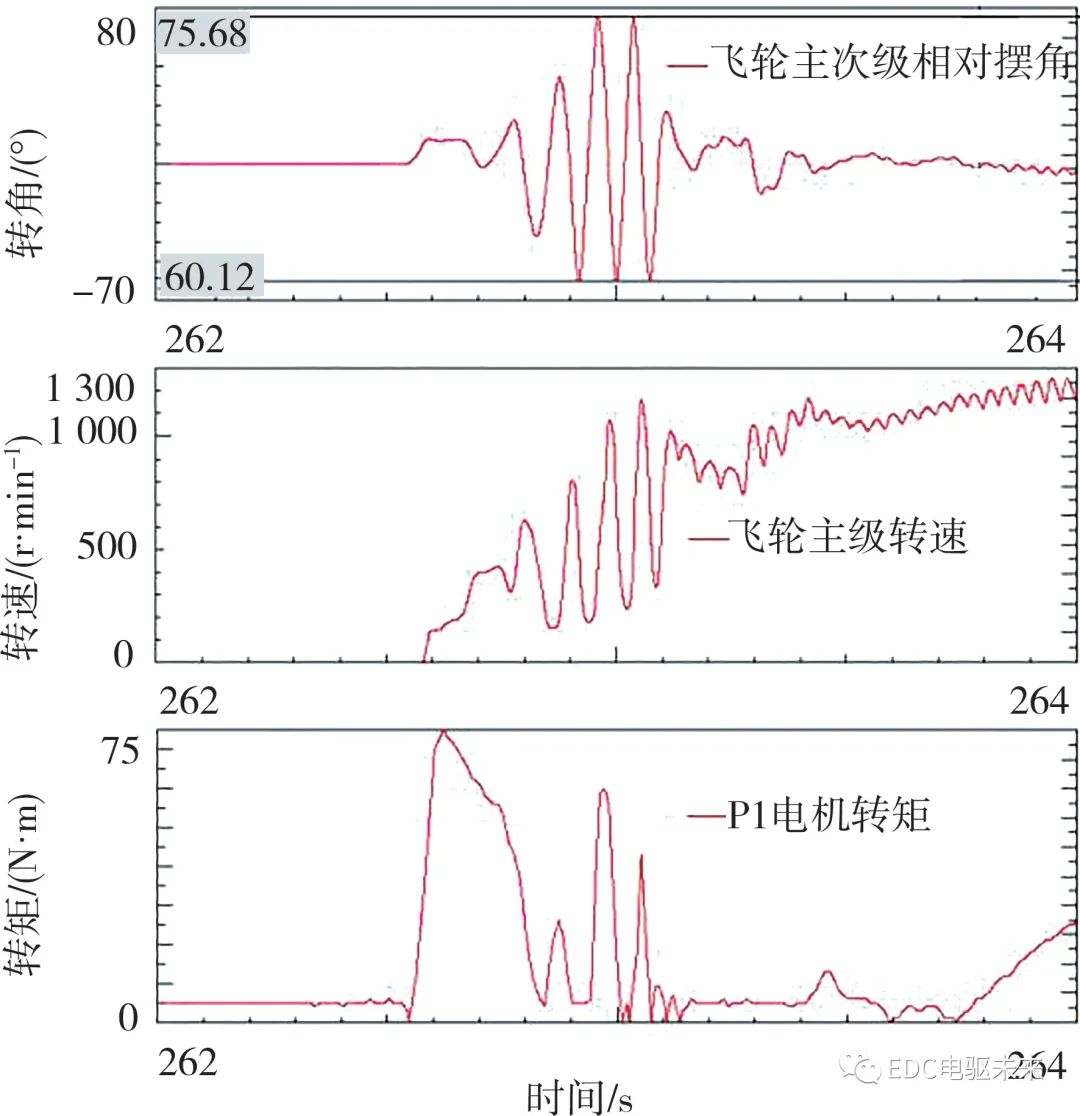
圖15 起動失火工況轉(zhuǎn)速實測數(shù)據(jù)
2.4.4 P1電機(jī)轉(zhuǎn)矩中斷工況分析
如圖16所示,P1電機(jī)轉(zhuǎn)矩在7 573 s左右快速從-120 N·m 降為接近0,發(fā)動機(jī)轉(zhuǎn)矩仍保持,并且發(fā)動機(jī)轉(zhuǎn)速持續(xù)拉升。針對該工況測試雙質(zhì)量飛輪主次級慣量的相對擺角,如圖17 所示,可以看出主次級單邊轉(zhuǎn)動角度在45°左右,雙質(zhì)量飛輪不會并圈。
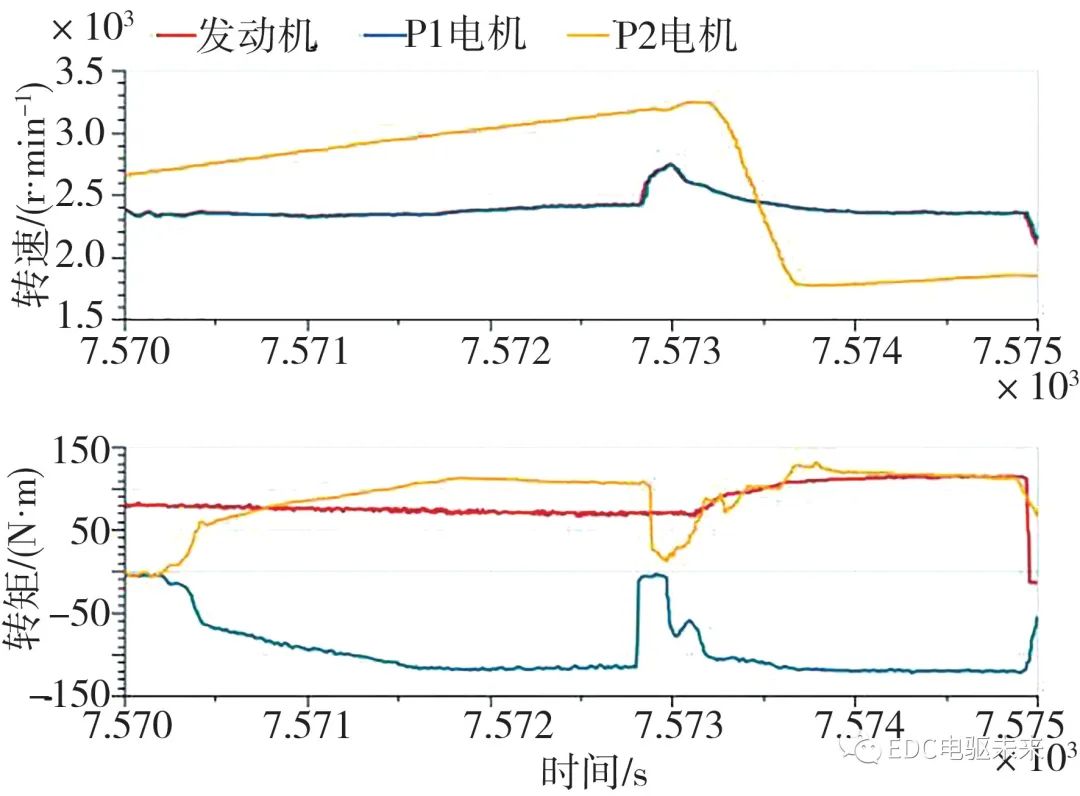
圖16 P1電機(jī)轉(zhuǎn)矩中斷工況標(biāo)定數(shù)據(jù)
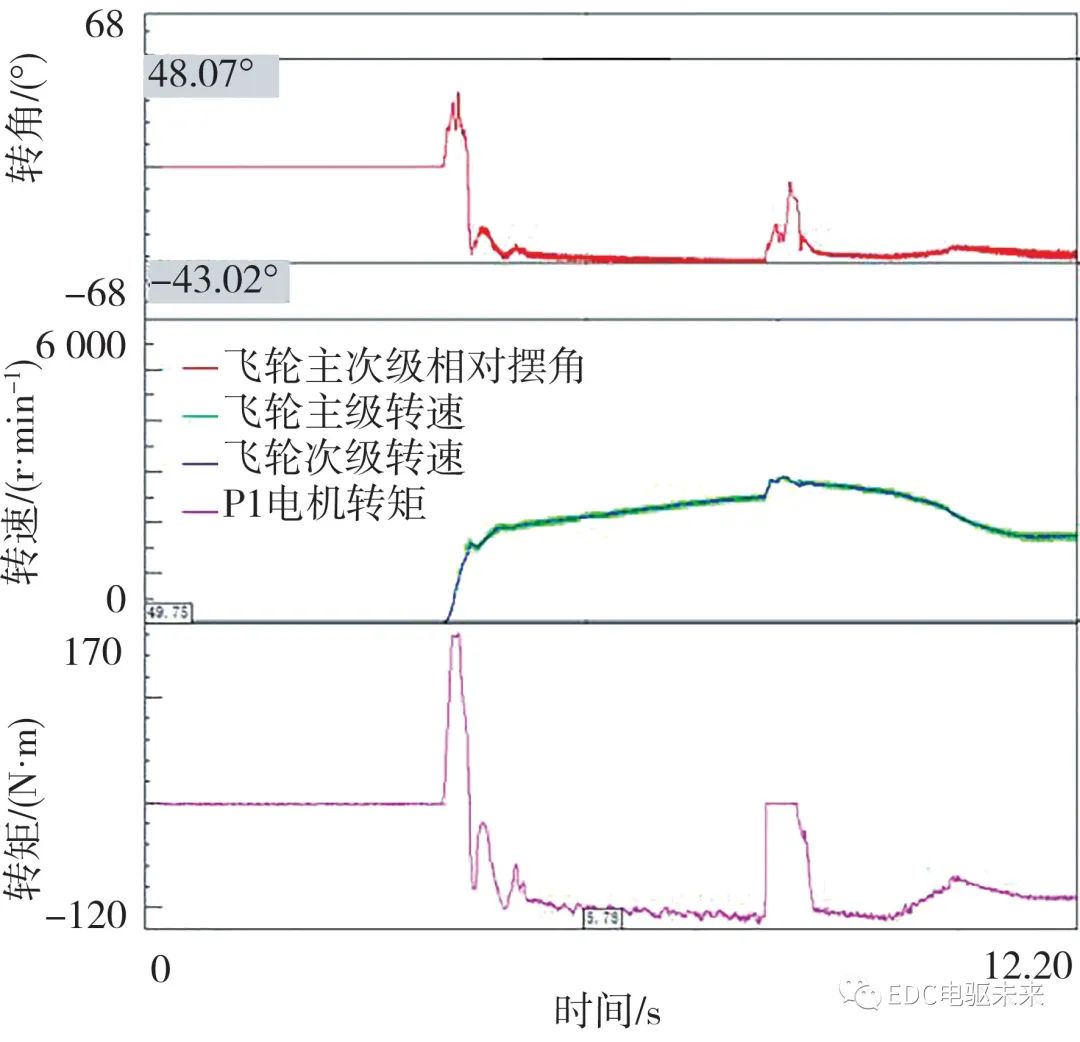
圖17 P1電機(jī)轉(zhuǎn)矩中斷工況轉(zhuǎn)速實測數(shù)據(jù)
2.4.5 小結(jié)
從上面的分析可以看出,表5中的工況1和工況3不會導(dǎo)致雙質(zhì)量飛輪并圈,而工況2會導(dǎo)致雙質(zhì)量飛輪并圈。一旦彈簧并圈,雙質(zhì)量飛輪將失去減振作用,發(fā)動機(jī)端的沖擊載荷將直接作用到后端傳動軸上,從而引起雙質(zhì)量飛輪彈簧的斷裂或傳動系上零部件的斷裂。圖18 為P1 電機(jī)連續(xù)短時起動試驗后雙質(zhì)量飛輪彈簧端部的撞擊痕跡。
由圖18 可以看到彈簧已經(jīng)將合金鋼制主級支撐位置沖擊出很嚴(yán)重的凹坑,同時在這種極限工況的驗證中,也復(fù)現(xiàn)了電機(jī)軸的斷裂現(xiàn)象。因此,避免雙質(zhì)量飛輪彈簧共振并圈是混合動力總成開發(fā)的關(guān)鍵課題。
3 CAE瞬態(tài)仿真驗證 ? 3.1 起動工況仿真分析 ?
為了進(jìn)一步分析P1 電機(jī)連續(xù)起動過程中雙質(zhì)量飛輪并圈產(chǎn)生的沖擊負(fù)荷大小及其對電機(jī)軸強(qiáng)度產(chǎn)生的影響,本文中搭建了混合動力總成起停工況一維動力學(xué)仿真模型,以發(fā)動機(jī)實測起動缸壓和電機(jī)轉(zhuǎn)矩加載策略作為輸入,考慮了系統(tǒng)的摩擦力矩,對雙質(zhì)量飛輪和離合器采用等效質(zhì)量、剛度和阻尼的簡化模型,如圖19 所示。對仿真模型進(jìn)行標(biāo)定后,仿真與實測的轉(zhuǎn)速曲線對比如圖20 所示,轉(zhuǎn)速趨勢基本一致,峰值處的幅值誤差約為0.5%。
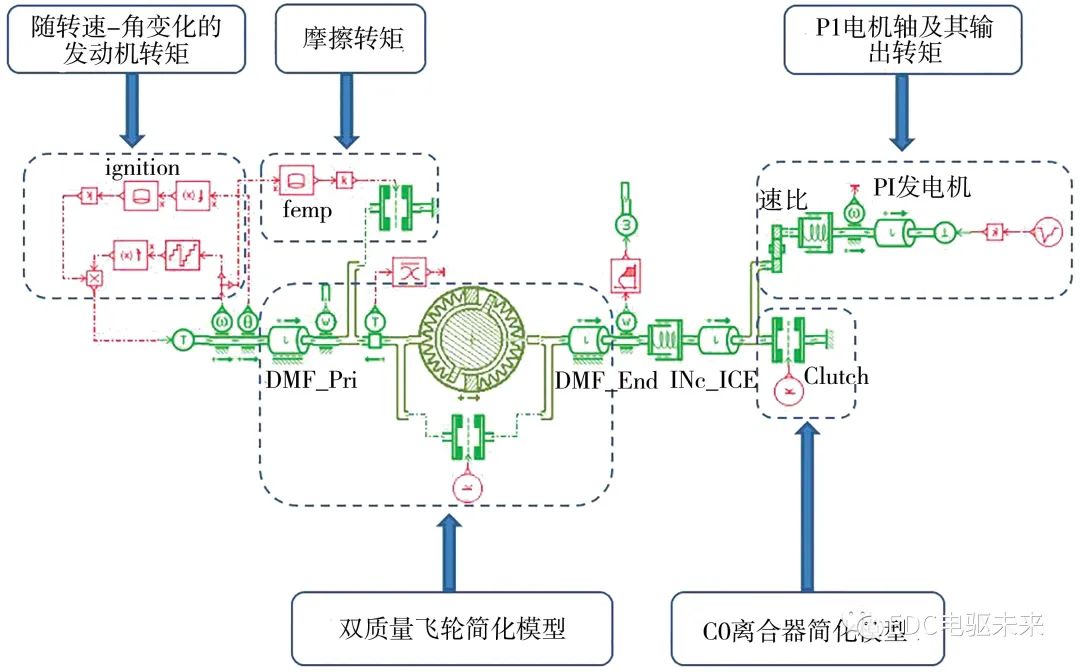
圖19 起動工況CAE模型示意
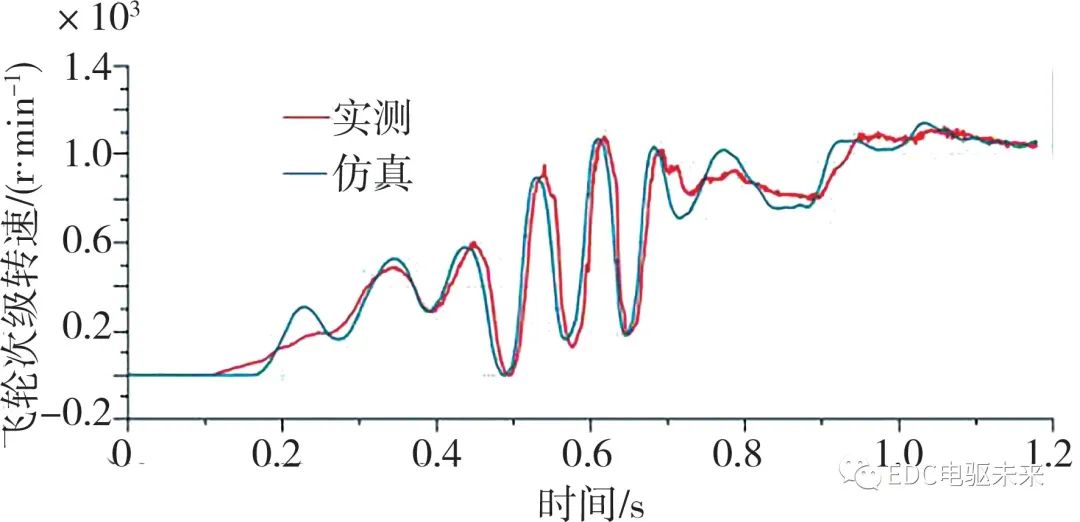
圖20 CAE模型仿真與實測對比
從臺架數(shù)據(jù)中截取8 次起動過程數(shù)據(jù),導(dǎo)入起停工況仿真模型中計算,分析結(jié)果統(tǒng)計在表7 中。結(jié)果顯示,起動工況發(fā)生失火現(xiàn)象或二次起動,并且起動時間足夠短,將非常容易導(dǎo)致飛輪發(fā)生并圈,同時電機(jī)輸入軸處產(chǎn)生轉(zhuǎn)矩突變。這和2.4 節(jié)中的試驗現(xiàn)象完全一致。
表7 起動數(shù)據(jù)分析結(jié)果統(tǒng)計
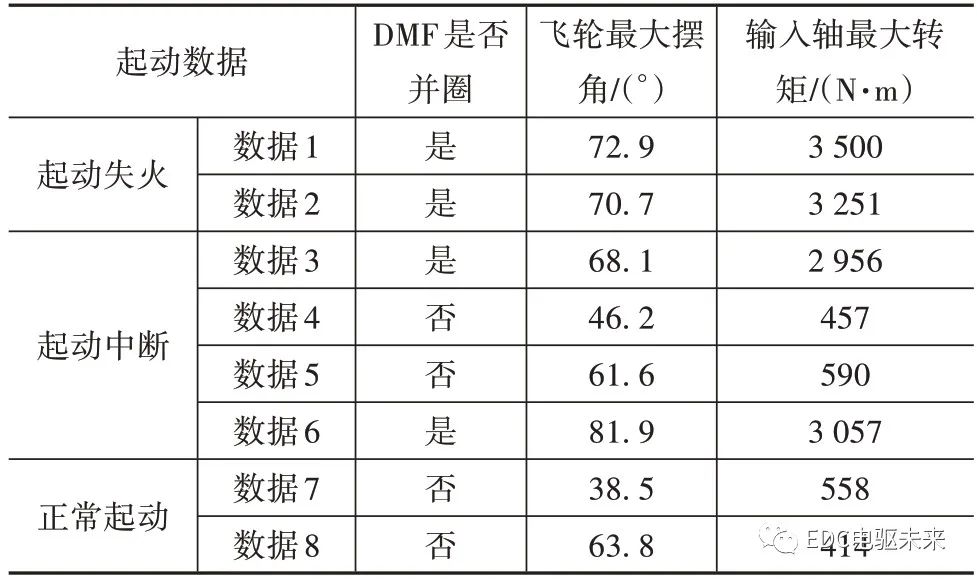
圖21 是其中一組起動失火仿真結(jié)果。從圖可以看出,發(fā)動機(jī)失火并連續(xù)起動導(dǎo)致發(fā)動機(jī)轉(zhuǎn)速在雙質(zhì)量飛輪共振轉(zhuǎn)速區(qū)停留,雙質(zhì)量飛輪弧形彈簧來回擺動至彈簧極限行程,此時飛輪相當(dāng)于剛性體,無減振作用,瞬時大轉(zhuǎn)矩直接作用到電機(jī)輸入軸,最大值達(dá)到3 500 N·m,超過了實測的輸入軸屈服極限轉(zhuǎn)矩2 049 和3 000 N·m 的斷裂轉(zhuǎn)矩。而正常的起動過程轉(zhuǎn)矩約為560 N·m,是雙質(zhì)量飛輪彈簧并圈工況的1/5-1/6。
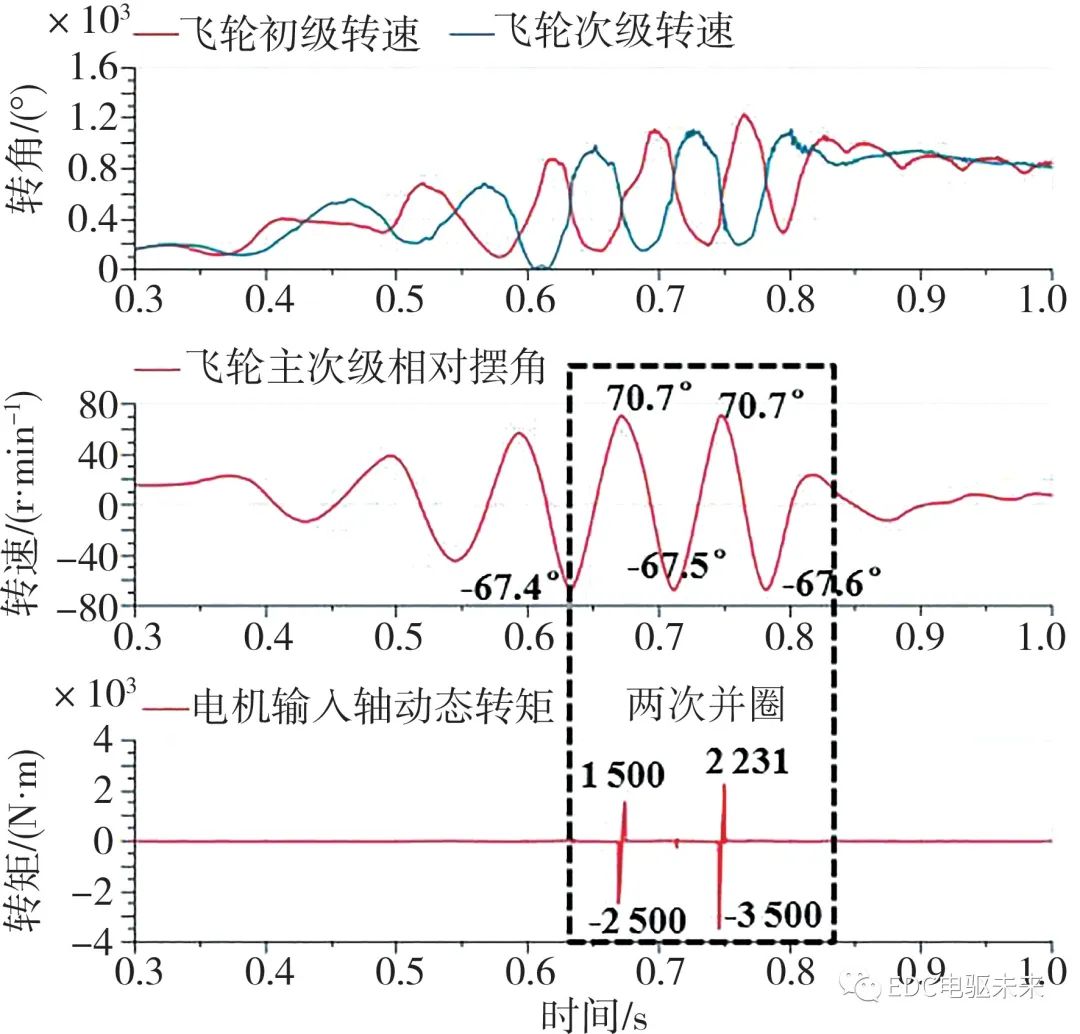
圖21 起動失火過程仿真結(jié)果
在此基礎(chǔ)上進(jìn)一步分析了P1 電機(jī)起動參數(shù)對于雙質(zhì)量飛輪主次級相對角位移的影響,其中P1 電機(jī)加載轉(zhuǎn)矩幅值設(shè)置區(qū)間為電機(jī)能力的40%-100%,電機(jī)轉(zhuǎn)矩從0加載到幅值的時間設(shè)置區(qū)間為0.02到0.2 s,如圖22 所示。從圖可以看出,當(dāng)加載時間不變,隨著P1 電機(jī)加載轉(zhuǎn)矩幅值的增加,雙質(zhì)量飛輪相對擺角明顯變大;當(dāng)P1 電機(jī)轉(zhuǎn)矩幅值不變,相對擺角隨轉(zhuǎn)矩加載時間增大而減小,加載的P1 電機(jī)轉(zhuǎn)矩幅值越大,這種趨勢越明顯;因此,P1 電機(jī)加載轉(zhuǎn)矩幅值和加載時間對雙質(zhì)量飛輪的相對擺角都有影響,尤其是轉(zhuǎn)矩幅值影響更大。
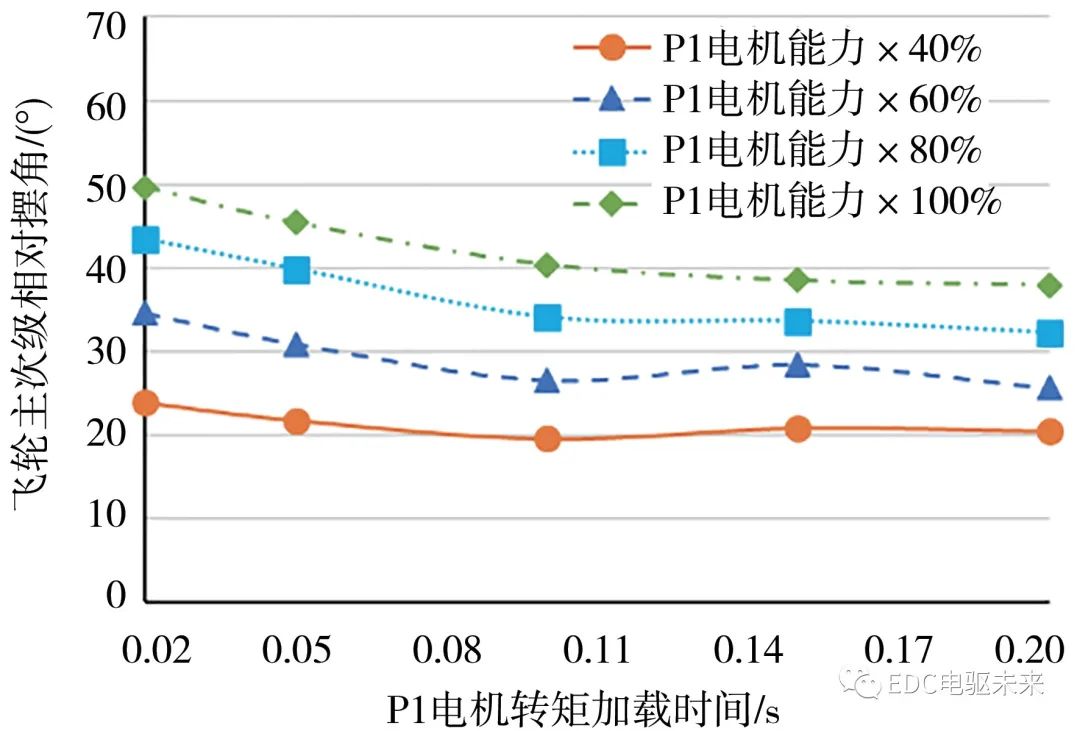
圖22 起動過程飛輪擺角隨電機(jī)加載方式的影響
定義發(fā)動機(jī)轉(zhuǎn)速從0 達(dá)到穩(wěn)定怠速轉(zhuǎn)速的時間為起動時間,考察P1 電機(jī)轉(zhuǎn)矩幅值及加載時間對于起動時間的影響,如圖23 所示。從圖可以看出:P1電機(jī)轉(zhuǎn)矩幅值越大,發(fā)動機(jī)起動時間越短,起動越快;P1 電機(jī)轉(zhuǎn)矩加載時間越長,發(fā)動機(jī)起動時間越長。
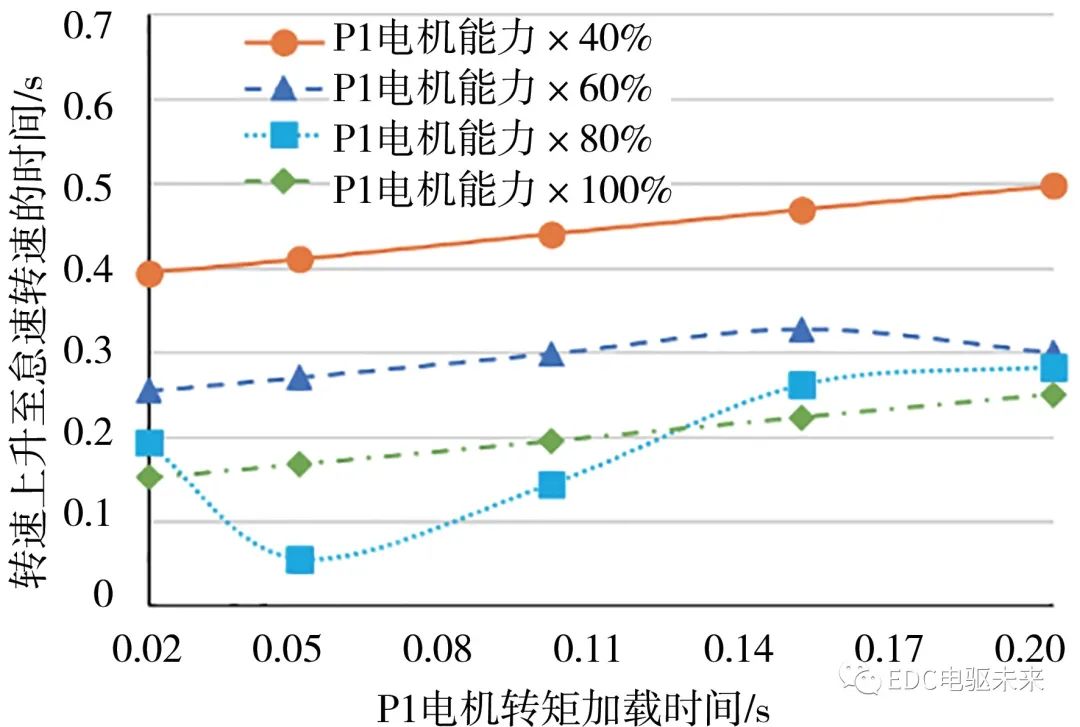
圖23 起動過程起動時間隨電機(jī)加載方式的影響
從上述分析得出:起動時P1 電機(jī)轉(zhuǎn)矩幅值越大,起動越迅速,有利于降低起動沖擊和抖動,而雙質(zhì)量飛輪并圈風(fēng)險越大;P1 電機(jī)轉(zhuǎn)矩加載時間越長,雙質(zhì)量飛輪并圈的風(fēng)險越小,但起動時間越長,不利于降低NVH。因此,在實際產(chǎn)品開發(fā)過程中,需要對起動標(biāo)定策略電機(jī)轉(zhuǎn)矩幅值、加載時間進(jìn)行DOE分析,得出最優(yōu)的起動標(biāo)定策略參數(shù),同時兼顧產(chǎn)品的可靠性和NVH性能。
3.2 花鍵軸強(qiáng)度CAE分析 ?
為了分析電機(jī)輸入軸在承受大沖擊轉(zhuǎn)矩時的應(yīng)力分布狀態(tài),對電機(jī)輸入軸強(qiáng)度進(jìn)行了有限元仿真。采用2 階4 面體單元,網(wǎng)格平均尺寸為0.2 mm,倒角位置劃分4-5 層,共計143 萬網(wǎng)格;電機(jī)蓋板、球軸承、電機(jī)輸入軸等分為一個整體網(wǎng)格,雙質(zhì)量飛輪次級慣量和電機(jī)輸入軸之間采用接觸模型;約束雙質(zhì)量飛輪次級慣量彈簧支撐處,并將3.1 節(jié)中仿真得到的輸入軸最大轉(zhuǎn)矩3 500 N·m 作為激勵施加在P1電機(jī)蓋板外圈,模擬P1 電機(jī)起動發(fā)動機(jī)過程,有限元仿真模型如圖24所示。
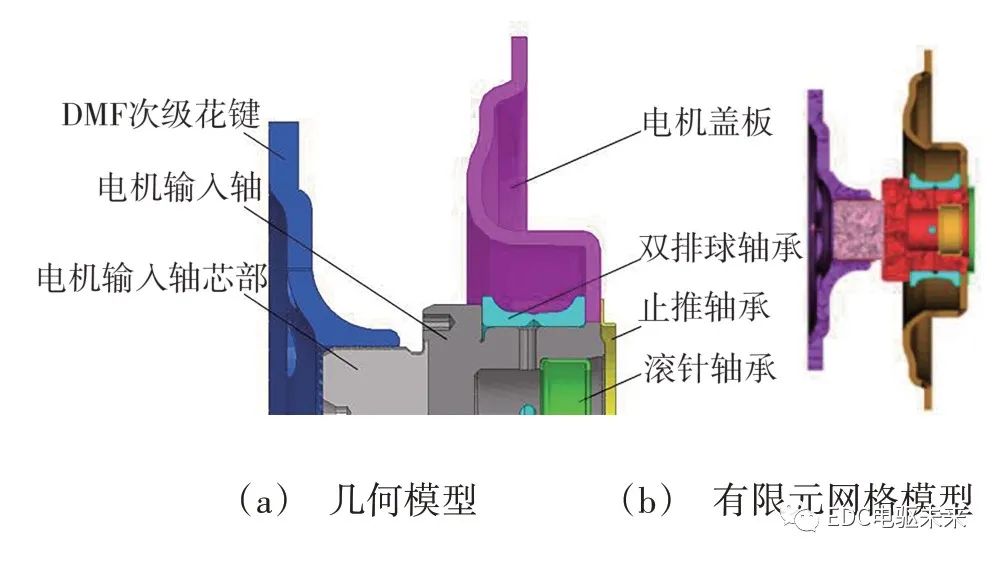
圖24 模型示意圖
分析結(jié)果如圖25 所示,電機(jī)輸入軸表面A區(qū)最大Mises 應(yīng)力2 774 MPa,B 區(qū)最大Mises 應(yīng)力2 418 MPa,C區(qū)最大Mises應(yīng)力2435MPa,芯部A區(qū)最大Mises應(yīng)力1506MPa,B區(qū)1605MPa,C區(qū)1685MPa。有限元仿真分析得出的輸入軸表面與芯部最大應(yīng)力均超過表3 中材料的抗拉強(qiáng)度,應(yīng)力集中位置也和實際的斷裂位置一致。
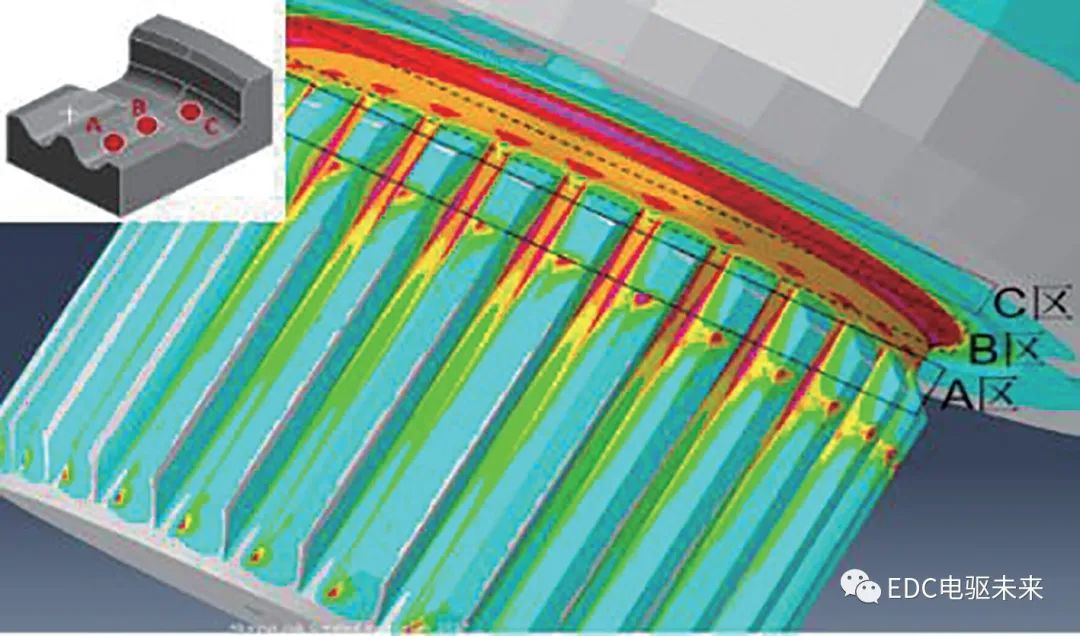
圖25 電機(jī)輸入軸表面應(yīng)力云圖
4 優(yōu)化方案與效果 ?
從上述分析也能看出,P1 電機(jī)短時連續(xù)起動發(fā)動機(jī)將導(dǎo)致雙質(zhì)量飛輪的弧形彈簧在低速共振區(qū)持續(xù)振蕩至并圈,導(dǎo)致電機(jī)輸入軸處動態(tài)轉(zhuǎn)矩超過其斷裂強(qiáng)度。因此必須要優(yōu)化起動控制策略,防止雙質(zhì)量飛輪共振。本文對控制策略進(jìn)行如下優(yōu)化:當(dāng)ECU 探測到發(fā)動機(jī)第一次起動失敗,需等發(fā)動機(jī)轉(zhuǎn)速降至0 后,再間隔一定時間才允許再次執(zhí)行P1 助力起動,目的是增加兩次起機(jī)時間間隔,防止發(fā)動機(jī)轉(zhuǎn)速在飛輪的共振區(qū)間波動,同時采用3.1 節(jié)對起動標(biāo)定策略進(jìn)行DOE 分析的方法得出的最佳P1 電機(jī)拖動轉(zhuǎn)矩和轉(zhuǎn)矩加載時間。
采用優(yōu)化后的標(biāo)定控制策略起動發(fā)動機(jī),實測結(jié)果如圖26 所示。可以看出,雙質(zhì)量飛輪主次級相對擺角約為50°,小于并圈角度61°,有效地規(guī)避了雙質(zhì)量飛輪的并圈。該策略實施后,電機(jī)輸入軸未再發(fā)生斷裂故障,并且發(fā)動機(jī)起動過程中的抖動問題也同步改善,說明優(yōu)化策略有效,本文的分析是合理的。
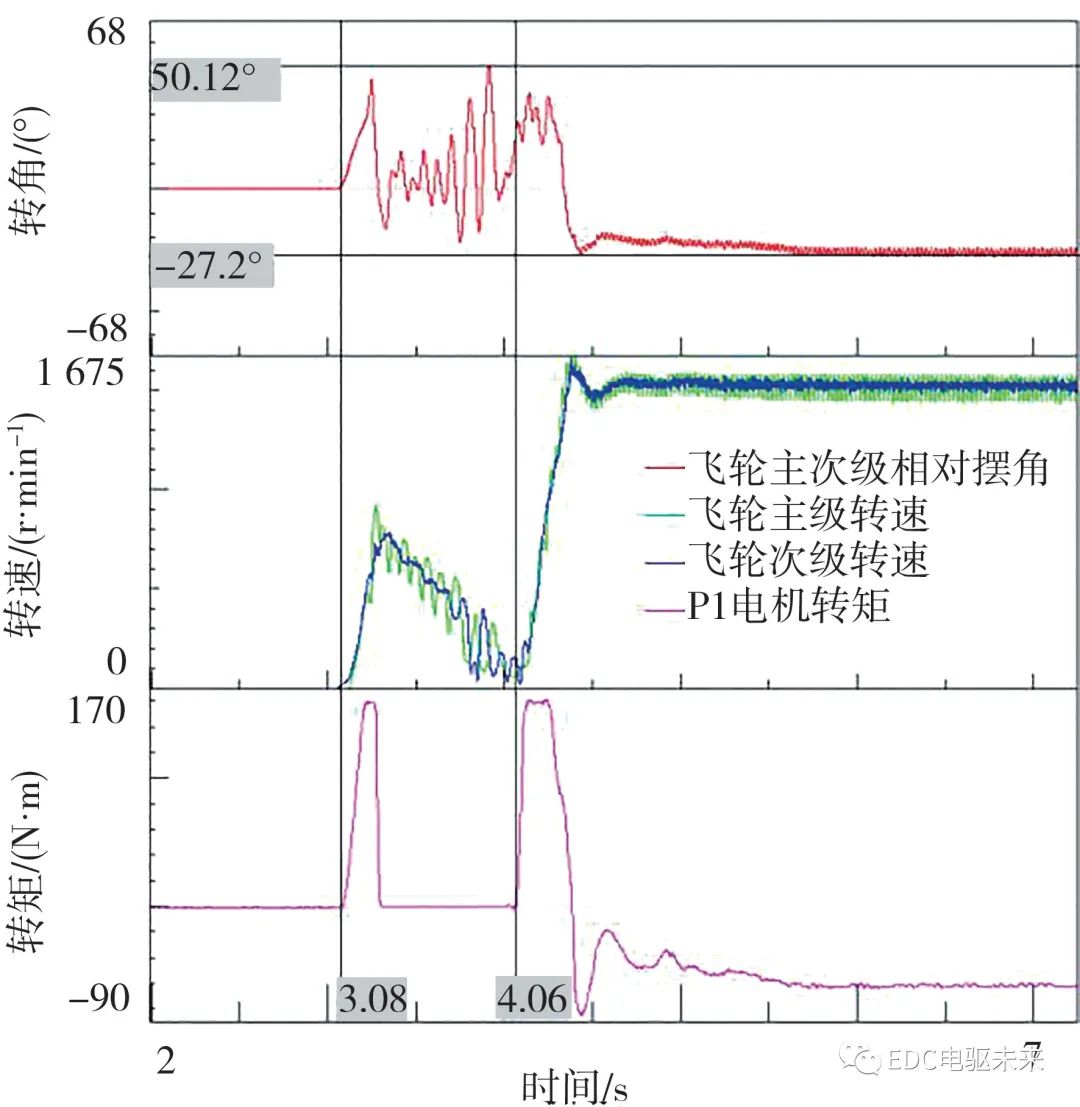
圖26 標(biāo)定優(yōu)化方案效果實測數(shù)據(jù)
5 結(jié)論 ?
(1)本文研究的混動變速器P1電機(jī)輸入軸斷裂問題為瞬態(tài)脆性斷裂,是P1 電機(jī)短時連續(xù)起動發(fā)動機(jī)引起雙質(zhì)量飛輪共振并圈、軸系負(fù)荷急劇增大導(dǎo)致。發(fā)動機(jī)起動過程中失火或標(biāo)定策略不當(dāng)都有可能導(dǎo)致這種共振現(xiàn)象發(fā)生。
(2)當(dāng)雙質(zhì)量飛輪并圈后,P1 電機(jī)輸入軸瞬時轉(zhuǎn)矩可達(dá)到3 500 N·m,超過其斷裂強(qiáng)度,從而導(dǎo)致電機(jī)輸入軸產(chǎn)生脆性斷裂。如何防止飛輪并圈現(xiàn)象的發(fā)生,是混合動力產(chǎn)品開發(fā)過程中需要重點(diǎn)研究的課題。
(3)在混合動力起停過程中,P1 電機(jī)助力轉(zhuǎn)矩幅值越大,起動時間越短,雙質(zhì)量飛輪并圈風(fēng)險越大;P1 電機(jī)轉(zhuǎn)矩加載時間越長,雙質(zhì)量飛輪并圈風(fēng)險越小,而起動時間加長將惡化NVH。
(4)針對P1 電機(jī)短時連續(xù)起動發(fā)動機(jī)工況,采用合理的起動標(biāo)定策略,包括控制兩次起機(jī)的時間間隔、合理的電機(jī)轉(zhuǎn)矩幅值及加載時間可以有效降低飛輪并圈風(fēng)險,進(jìn)而規(guī)避傳動系統(tǒng)可靠性風(fēng)險,同時獲得優(yōu)異的NVH性能。
編輯:黃飛
?













 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論