 電子發燒友App
電子發燒友App


關于步進電機你需要知道的一切
高可靠性步進電機的強大能力
步進電機常被誤認為是伺服電機中的次要電機,但事實上,它們與伺服電機一樣具有很高的可靠性。電機通過與控制器向驅動器輸出的脈沖信號精確同步而運轉,實現高精度的定位和速度控制。步進電機在低速時具有高扭矩和低振動的特點,非常適合需要短距離快速定位的應用。
關于步進電機你需要知道的一切
“步進電機?伺服電機性能肯定更好。” 當被問及步進電機時,這是一個典型的回答。顯然,對步進電機存在重大誤解。事實上,步進電機已用于各種類型的應用,例如高級設備和可訪問的自動化儀器。本文解釋了連續選擇步進電機的原因。有的讀者可能會說,他們從來沒有見過步進電機。步進電機已在許多應用和行業中用作需要高精度控制的驅動系統的電機解決方案,例如工廠自動化 (FA)、半導體制造設備、FPD 和太陽能電池板、醫療設備、分析儀器、精密平臺、金融系統,食品包裝機,
為什么要使用步進電機?
易于使用:34%
便宜:17%
操作簡單:16%
無需調校:12%
其他:21%
*受訪人數:258(可多選)/東方電機研究
重點:易用性、操作簡單、成本低
根據對步進電機用戶的調查,很多人青睞步進電機的“使用方便”、“操作簡單”、從結構和系統配置上衍生出來的“成本低”。由于簡單的結構和系統配置,許多用戶在步進電機中發現這些積極的方面是有道理的。然而,一些讀者可能會懷疑電機在精度和扭矩方面的實際性能。除非有與伺服電機等其他控制電機的比較示例,否則很難完全掌握整個想法。通過了解特性并根據所需操作采取不同的方法,步進電機當然可以降低設備成本。步進電機的特性和技術資料說明如下:
令人印象深刻的“停止精度”。在“低/中速范圍”快速移動
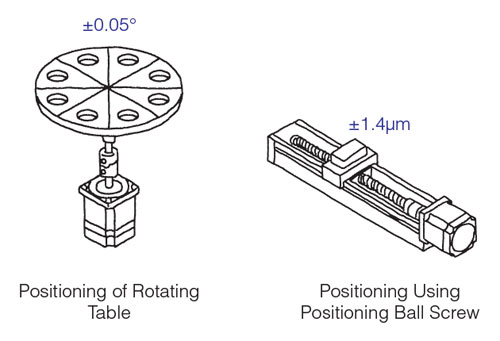
步進電機具有出色的停止精度,可以進行開環精確控制。例如,當使用RK II 系列定位旋轉工作臺時,其停止精度在±0.05°以內(無負載)。由于停止位置誤差不會在步驟之間累積,因此可以進行高精度定位。無需編碼器的步進電機結構允許簡單的驅動系統和低成本。
第 1 點
驚人的停止準確性
例如,將步進電機的停止精度±0.05°轉換為滾珠絲杠機構時:
工作條件:
? 電機:RK II 系列
? 滾珠絲桿導程:10mm
停止精度:±1.4μ m
通常,研磨滾珠絲杠類型的精度為 ±10μ m。當使用滾珠絲杠類型時,其精度下降到 ±20μ m,這表明步進電機的停止精度遠高于滾珠絲杠類型。
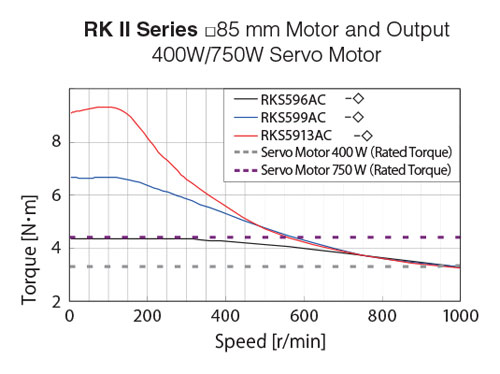
低/中速范圍內的高扭矩是步進電機的另一大特點。伺服電機的主要特點之一是在中高速范圍內產生平坦的扭矩。伺服電機適用于長行程操作(多轉)。另一方面,步進電機的扭矩特性并不平坦。低/中速范圍內的扭矩曲線趨于變得非常高,而在高速范圍內變得非常低。除了伺服電機難以在低速范圍內穩定旋轉外,步進電機還可以在短行程操作(較少旋轉)所需的速度范圍內提供高扭矩,因此它們適用于選擇所需的步距角進行多次旋轉表和點動應用程序。這是由于短行程操作的定位時間短,因此電機在達到最大速度之前減速并停止。換句話說,通常不需要高速特性。
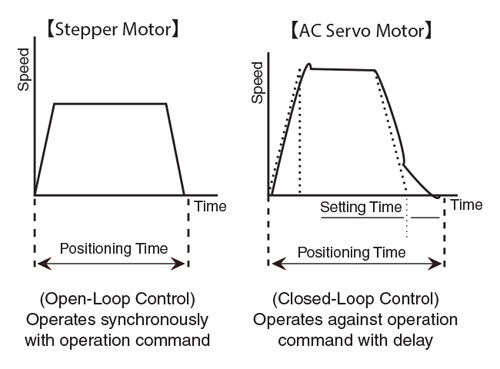
高響應性和出色的同步性
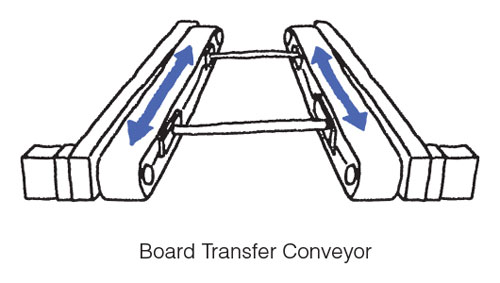
步進電機的第三個顯著特點是反應靈敏。向電機發送單向命令的開環控制具有對命令的高度跟隨機制。等待編碼器反饋的伺服電機往往會“延遲”命令,而步進電機則與脈沖同步運行。因此,“延遲”很少,從而產生出色的響應。因此,步進電機適用于需要多臺電機同步運行的應用。一個例子是電路板傳送應用,它需要兩個傳送帶,分別安裝一個電機,以在兩個傳送帶之間傳送電路板。
要點 2
出色的低速/中速范圍!
例:機座號85mm的電機在1000r/min時的扭矩相當于400W伺服電機的額定扭矩。
在更低的速度范圍內,扭矩最高可達 5 倍。對于短距離定位,在低速/中速范圍內具有高扭矩是必不可少的。
要點 3
高響應性!
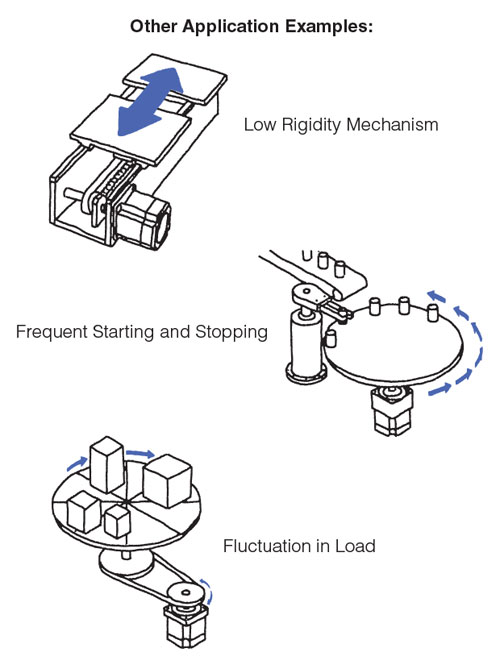
合適的應用
除了頻繁啟動和停止的微動應用之外,步進電機還適用于不喜歡振動的圖像檢查處理器的定位、伺服電機難以調整的凸輪驅動以及皮帶驅動等低剛性機構。此外,通過將滾珠絲杠驅動更換為皮帶驅動,成本顯著降低。
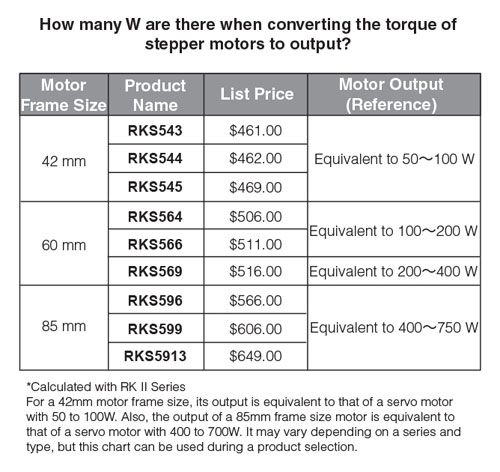
強大功能的優勢
除了降低成本,步進電機在性能方面還有很多優勢。下表顯示了 RKII 系列示例的轉換扭矩到典型伺服功率范圍的扭矩。再往下,介紹步進電機的基本結構、系統、應用實例等詳細信息,了解更多步進電機信息。
步進電機基礎知識
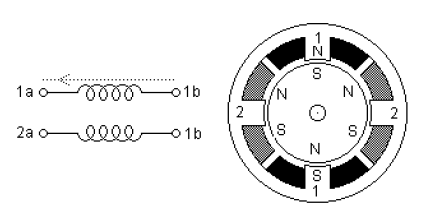
運作與架構
步進電機以固定的步距角旋轉,就像時鐘的秒針一樣。得益于電機內部的機械結構,可以通過開環控制進行高精度定位。
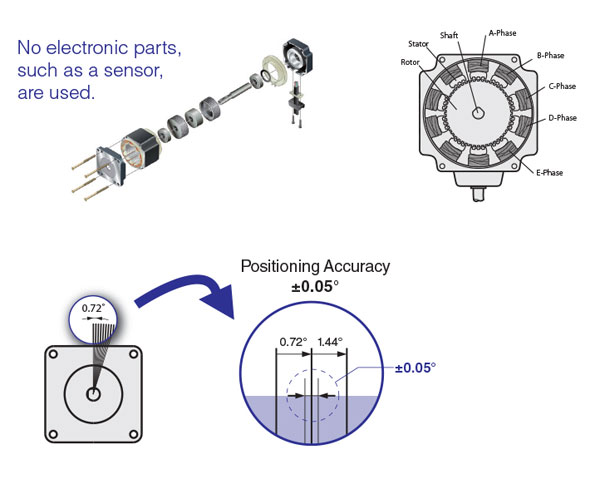
準確定位(步數)
在完全控制旋轉和速度的同時,無需使用電機內的編碼器等電氣元件即可實現步進電機的簡單結構。因此,步進電機非常堅固,可靠性高,故障率極低。至于停止精度,±0.05°(沒有累積螺距誤差)是非常準確的。由于步進電機的定位采用開環控制,由磁化定子和小齒磁轉子運行,因此步進電機對指令的跟隨機制比伺服電機高。此外,停止步進電機時不會發生振蕩。它們在剛性低的皮帶傳動中也很出色。
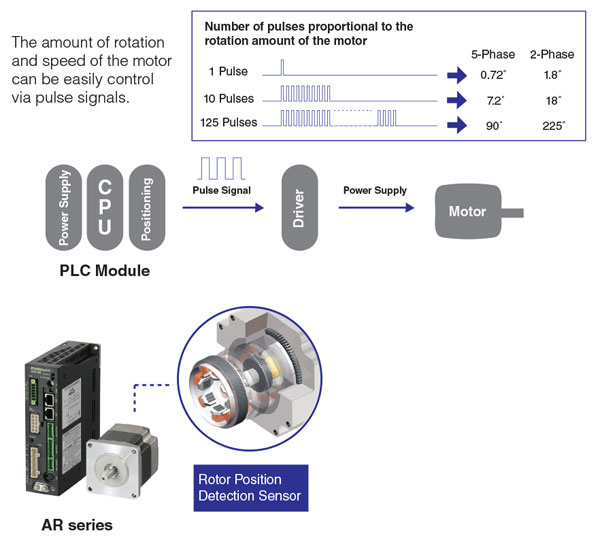
用于速度控制和位置控制
當脈沖通過脈沖發生器輸入到驅動器時,步進電機根據輸入脈沖的數量進行定位。5相步進電機的基本步距角為0.72°,2相步進電機為1.8°。步進電機的轉速由提供給驅動器的脈沖頻率(Hz)的快慢決定,只需改變驅動器的輸入脈沖數或頻率,即可自由改變電機轉速。步進電機不僅可以作為位置控制電機,還可以作為高同步的速度控制電機。
步進電機用途:
? 固定步距角的高頻重復定位
? 寬度調整等需要較長停止時間的定位
? 波動負載和剛性變化
? 分割1周期的定位
? 需要同步運行的電機軸
無需傳感器或反饋的簡單控制
由于可以在與指令脈沖數和速度同步的同時進行精確定位和位置控制,因此不需要傳感器等用于定位的設備。因此,整個系統構建簡單。如果不需要插值運算等高級控制,建議使用內置控制器功能型驅動程序。通過消除控制器(例如脈沖發生器和 PLC 定位模塊)來降低成本。
內置傳感器閉環型
雖然開環控制可以實現高精度定位,但如果出現問題怎么辦?為了避免此類缺陷,可以使用編碼器型或內置傳感器閉環控制型電機(AR 系列)。
能否進一步降低成本?
設計工程師的共同問題是降低成本。真的沒有辦法進一步降低成本嗎?以滾珠絲杠機構為基礎,進行了提高規格并降低成本的試驗。下面解釋測試的細節:
使命
直線運動機構
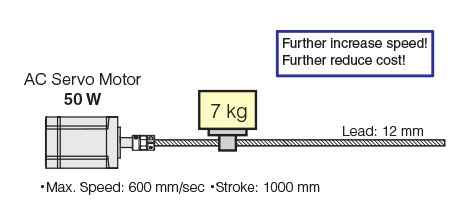
1. 進一步提高速度
2. 進一步降低成本
【原計劃設備的條件】 機構:滾珠絲杠+伺服電機 右圖的負載、速度和導程等條件是根據安裝的伺服電機確定的用滾珠絲杠和鋼板。
計劃
將機構更改為皮帶輪
? 如果試圖提高速度,滾珠絲杠 => 皮帶機構可能更合適 => 皮帶機構可以達到 1000 毫米/秒至 1500 毫米/秒。如果定位精度沒有問題,請更換皮帶。? 如果可以更換皮帶,可顯著降低成本 => 皮帶價格便宜,但其低剛性可能會影響伺服電機運行的穩定性,即使使用自動調整也是如此。
問題
1. 螺桿和皮帶的停止精度差異...需要多大的停止精度?
2. 低剛度的影響... 對穩定時間的影響,避免調整問題
? 更好的螺桿停止精度。換腰帶沒問題?=> 應用要求的止動精度為±0.05 ~ 0.1mm,不如絲桿止動精度。所以用皮帶代替應該沒問題。
? 如果更換為皮帶,機構的剛性會降低,因此伺服電機的運動會變得不穩定。=> 在定位電機中,步進電機沒有內置編碼器。因此,它們不需要調整并且對低剛性有很強的抵抗力。無論負載波動如何,它們的運動都是穩定的。如果輸出相同,請考慮步進電機。
估計
機構:皮帶輪+電機:嘗試使用步進電機
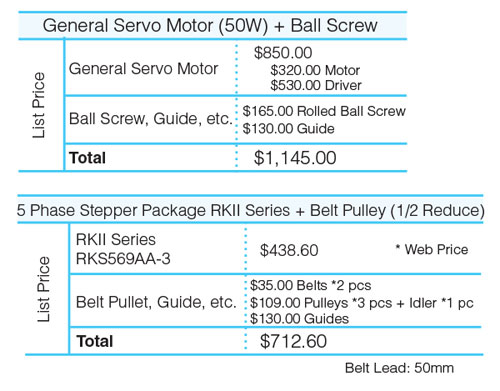
? 可運輸質量-> 最大。最大允許負載 7kg ? 行駛速度 -> 提高到 800 mm/sec 電機 => 從步進電機改為伺服電機,成本降低了 50%!機構 => 從滾珠絲杠改為皮帶機構,成本降低 7%!
結果
成本降低空間大!
通過對機構進行零基礎的審查以及基于特性的電機選擇,我們成功地增加了規格并降低了成本,即使電機尺寸稍大一些。過去,電機的選擇是根據其易用性或熟悉程度來完成的。經過這次練習,伺服電機和步進電機之間的操作差異變得清晰起來。令人驚訝的是,步進電機比預期的更實惠。使用這種方法的其他設備必須有降低成本的空間。此練習再次確認,在電機規格和成本之間實現良好平衡的選擇,同時最大限度地提高電機特性是關鍵。
步進電機和伺服電機哪個停止精度更高?
客戶咨詢: 尋找停止精度好的電機。步進電機和伺服電機有多大區別?
假設: NX系列交流伺服電機配備20位編碼器,分辨率高,停止精度好。
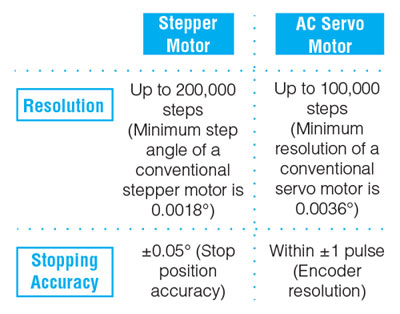
首先要明確分辨率和停止精度的區別:分辨率就是每轉的步數,步進電機也叫步距角。在考慮所需定位的精確度時需要它。停止精度是實際停止位置與理論停止位置之差。
這是否意味著配備高精度編碼器的交流伺服電機比步進電機具有更好的停止精度?
不完全的。過去“伺服電機的停止精度等于編碼器分辨率在±1脈沖以內”的概念沒有問題。然而,最近的伺服電機配備了具有非常精細分辨率的 20 位編碼器(1,048,576 步)。因此,編碼器安裝精度引起的誤差對停止精度有很大影響。因此,停止精度的概念開始略有變化。
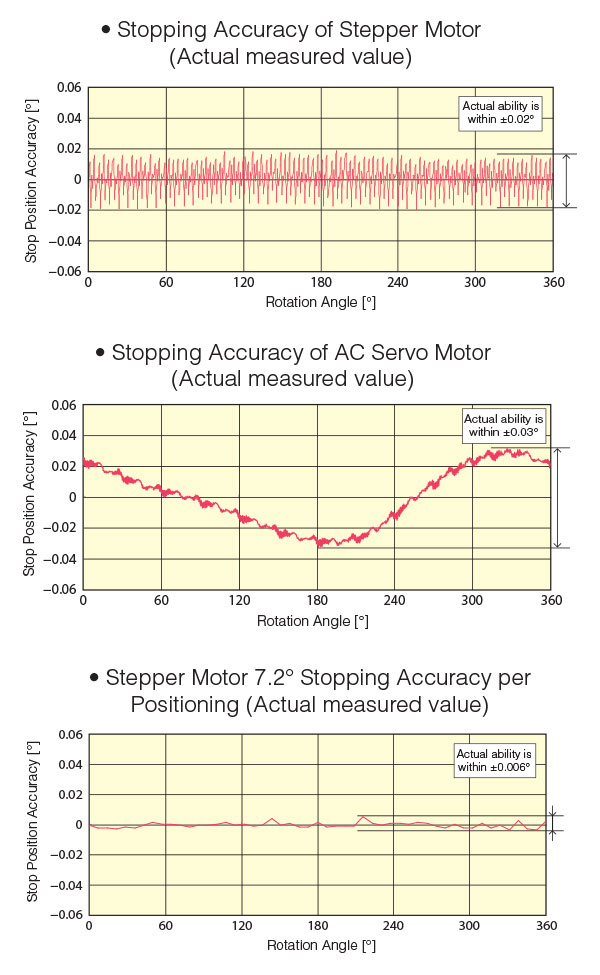
根據對比圖,步進電機和交流伺服電機的停止精度幾乎相同(±0.02o ~ 0.03o)。精度取決于步進電機電機的機械精度,因此如果停止位置可以每 7.2o 完成,則根據電機結構,始終由轉子上相同的小齒進行定位。這使得可以進一步提高停止精度。
但是,步進電機可能會根據負載扭矩值產生位移角。此外,根據機構條件,AC 伺服電機可能具有較寬的波動寬度作為對增益調整的響應。由于這些原因,需要謹慎一些。
步進電機與交流伺服電機停止精度比較
審核編輯:湯梓紅
















 工商網監
工商網監
評論