 電子發(fā)燒友App
電子發(fā)燒友App


無刷有感電機(jī)測速、速度閉環(huán)控制
0.前言
隨著ROS移動機(jī)器人技術(shù)的發(fā)展,小伙伴們已經(jīng)不在滿足于低功率的差速小車了,希望可以搭建功率更高的ROS移動機(jī)器人平臺。常見的高功率的移動機(jī)器人多是采用無刷輪轂電機(jī),于是就出現(xiàn)了本篇文章,給大家提供一個(gè)輪轂電機(jī)的測速以及控制的思路。
1.直流無刷有感電機(jī)介紹
無刷直流 (Brushless Direct Current, BLDC)電機(jī)是一種正快速普及的電機(jī)類型,在移動機(jī)器人領(lǐng)域也有諸多應(yīng)用,這里我們將對無刷直流電機(jī)的常見問題進(jìn)行描述。
(1)工作原理
首先,我們來看一下無刷電機(jī)的工作原理,下圖為三電極、二磁極、內(nèi)轉(zhuǎn)子無刷電機(jī)演示。

無刷電機(jī)不是傳統(tǒng)的直流電機(jī),模型雖然是直流電池供電,但通過無刷電調(diào)之后就轉(zhuǎn)變?yōu)榱巳嘟蛔?a href="http://www.asorrir.com/tags/電流/" target="_blank">電流傳輸?shù)搅巳齻€(gè)極性上。通過上圖可以看出,無刷電機(jī)是沒有碳刷的,和有刷相反,無刷電機(jī)的磁鐵成了轉(zhuǎn)子。
(2)內(nèi)轉(zhuǎn)子與外轉(zhuǎn)子
上面無刷電機(jī)工作原理圖所示的是內(nèi)轉(zhuǎn)子無刷電機(jī),顧名思義,磁鐵在里邊。而外轉(zhuǎn)子無刷電機(jī)則相反,它的磁鐵“包”在外面。而A、B、C電極在里邊。這樣的設(shè)計(jì)可以讓電機(jī)的扭力更大,但轉(zhuǎn)速卻上不來。因?yàn)檫@個(gè)原因,一般四旋翼無人機(jī)上常見外轉(zhuǎn)子無刷電機(jī)(需要扭矩大),而模型車和模型船一般都使用內(nèi)轉(zhuǎn)子無刷電機(jī)(需要轉(zhuǎn)速高)。
(3)有感無刷和無感無刷
要說明這個(gè)問題首先要弄懂感是啥,有感無刷中的感是指“霍爾傳感器”,那么什么是“霍爾”呢?霍爾是指的霍爾效應(yīng),這一現(xiàn)象是美國物理學(xué)家霍爾于1879年在研究金屬的導(dǎo)電機(jī)構(gòu)時(shí)發(fā)現(xiàn)的。當(dāng)電流垂直于外磁場通過導(dǎo)體時(shí),在導(dǎo)體的垂直于磁場和電流方向的兩個(gè)端面之間會出現(xiàn)電勢差,這一現(xiàn)象便是霍爾效應(yīng)。這個(gè)電勢差也被叫做霍爾電勢差。
那么我們?yōu)槭裁匆袘?yīng)這玩意?要說清這個(gè)問題就必須從無感無刷的一個(gè)缺點(diǎn)說起。無刷電機(jī)的轉(zhuǎn)速是靠交流電頻率決定的,那么電調(diào)要想方設(shè)法弄明白目前電機(jī)的轉(zhuǎn)速以及當(dāng)前電機(jī)的狀態(tài)。其實(shí)這對已經(jīng)正常運(yùn)轉(zhuǎn)的電機(jī)來說很容易,但對于一個(gè)剛剛起步或者運(yùn)行速度很慢的電機(jī)來說就顯得比較麻煩了(很難較準(zhǔn)確的測出電機(jī)轉(zhuǎn)速的狀態(tài)),所以無感無刷電機(jī)會在低速時(shí)線性不好甚至可能會顫抖,而起步的扭力也難以強(qiáng)過同等級有刷電機(jī)。
但是人們發(fā)現(xiàn)無論什么運(yùn)行狀態(tài)的無刷電機(jī),它的霍爾效應(yīng)都是明顯的,所以通過霍爾效應(yīng)電調(diào)可以很容易的知道無論高速還是低速電機(jī)的運(yùn)行狀態(tài),從而解決了無感無刷電機(jī)的毛病!
(4)直流有感無刷電機(jī)驅(qū)動電路
驅(qū)動電路原理
一般有感直流無刷電機(jī)的驅(qū)動電路是由6個(gè)MOS管組成的橋式電路。
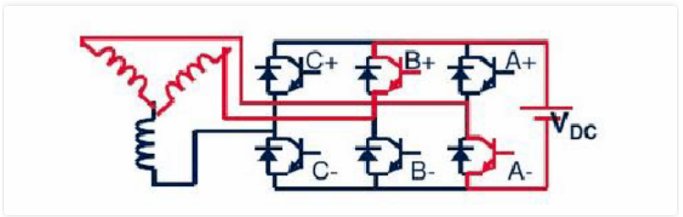
編程控制無刷直流電機(jī)運(yùn)行,其最底層的工作就是控制著6個(gè)MOS管的兩個(gè)狀態(tài):導(dǎo)通和關(guān)斷。
根據(jù)相關(guān)的控制理論,我們可以清晰的得知:
(1)每次只能打開兩個(gè)MOS管。保持任意兩個(gè)電極上有電。
(2)驅(qū)動電路上面一排和下面一排的MOS管不會出現(xiàn)兩個(gè)同時(shí)打開。只打開一行就只送了一個(gè)電極的電。
(3)同一列的MOS管也不會同時(shí)打開,同時(shí)打開會出現(xiàn)電源短路。
所以6個(gè)MOS管的開關(guān)狀態(tài)只有六種,常見的無刷電機(jī)驅(qū)動器的電路原型就是這樣,也就是六步換向法的由來。
無刷電機(jī)調(diào)速原理
如果我們對下面一排MOS管按驅(qū)動原理進(jìn)行一次性的完全打開與關(guān)閉,上面一排MOS管按驅(qū)動原理通過單片機(jī)的PWM進(jìn)行非完全一次性打開與關(guān)斷的,也就是MOS不完全打開,MOS的G極達(dá)不到最大電壓值,這樣我們就實(shí)現(xiàn)調(diào)速了。
表示無刷電機(jī)正反轉(zhuǎn)狀態(tài)
通過三個(gè)霍爾傳感器的六種狀態(tài)表示無刷電機(jī)的正反轉(zhuǎn)過程。一般無刷有感電機(jī)都安裝3個(gè)霍爾傳感器,關(guān)于霍爾傳感器在無刷電機(jī)中有以下特點(diǎn):
(1)霍爾信號不會出現(xiàn)全零(000)和全一(111)兩種狀態(tài)。所以,三個(gè)霍爾僅存6中狀態(tài)。
(2)霍爾的6種狀態(tài)是順序變化的,往復(fù)循環(huán)。通過先后順序即可判斷電機(jī)正反轉(zhuǎn)。
所以我們是不是可以理解為,任意三個(gè)霍爾的組合狀態(tài)之后的狀態(tài)只有兩種,一個(gè)表示正轉(zhuǎn),一個(gè)表示反轉(zhuǎn)。
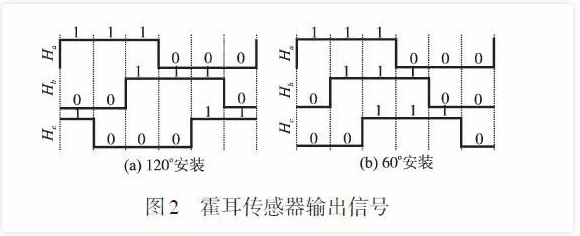
(5)霍爾安裝角度
常用的霍耳傳感器安裝方式有120 ° 安裝和60° 安裝2 種,2 種方法都可以輸出6 個(gè)不同的霍耳信號,分別對應(yīng)6 個(gè)不同的區(qū)域,當(dāng)無刷直流電機(jī)轉(zhuǎn)子轉(zhuǎn)到某一區(qū)域時(shí),對應(yīng)的繞組通電,電機(jī)就可以正常工作,若霍耳信號與繞組關(guān)系錯(cuò)誤,就無法正常工作,甚至?xí)﹄姍C(jī)或功率器件造成損壞。因此,確定霍耳信號與定子繞組關(guān)系對于無刷直流電機(jī)而言非常重要。
霍耳傳感器常用來檢測無刷直流電機(jī)換相點(diǎn)。三相無刷直流電機(jī)需要3 個(gè)霍耳傳感器來檢測6 個(gè)不同的位置,霍耳傳感器的安裝有120° 安裝和60° 安裝2 種方式,120° 安裝指3 個(gè)霍耳傳感器互差120° (電角度),而60°安裝指3 個(gè)霍耳傳感器互差60° (電角度)。2 種安裝方式最大的區(qū)別在于采用60 ° 安裝時(shí)可以輸出“000”和“111”信號,而120° 安裝則不會輸出這2 個(gè)信號,通過這一點(diǎn)可以判斷霍耳傳感器的安裝方式。
霍爾的安裝角度,對驅(qū)動器的選擇有很大的影響,通常賣家都會問無刷電機(jī)的霍爾安裝角度。
2.STM32無刷電機(jī)輪速測量
(1)測速方法:
單片機(jī)轉(zhuǎn)速測量的算法很多,主要有頻率測速法(M法)、周期測速法(T法)等。
M 測速法:通過在相同的時(shí)間T間隔內(nèi)計(jì)算傳感器輸出的脈沖個(gè)數(shù)來算出轉(zhuǎn)速;
設(shè)R為每轉(zhuǎn)的脈沖信號數(shù),T為間隔時(shí)間,M為T時(shí)間內(nèi)測得的脈沖數(shù)。可見這種測速法的分辨率取決于電機(jī)轉(zhuǎn)一周的輸出R和測速周期T,極對數(shù)越多或測量周期越長,則分辨率越小,但一般電機(jī)的R不大,且測量周期不宜過大,因?yàn)闇y量周期過大為影響測速的反應(yīng)速度,降低系統(tǒng)的實(shí)時(shí)性。所以這種方法是不可取的。
T法測速:通過測量傳感器發(fā)出的相鄰兩個(gè)脈沖之間的T來算出轉(zhuǎn)速;因?yàn)橄噜弮蓚€(gè)脈沖對應(yīng)輪子上的物理距離N是確定的。
用一個(gè)計(jì)數(shù)器對三個(gè)霍爾的脈沖信號進(jìn)行采集;從一個(gè)脈沖觸發(fā)開始計(jì)時(shí),到下一個(gè)脈沖觸發(fā)新的計(jì)時(shí),測得每兩個(gè)脈沖間的時(shí)間T;
所以,T法測速的電機(jī)速度speed=N/T;
注意,關(guān)于N的獲得有兩種方法,一、根據(jù)電機(jī)參數(shù)即可獲得,用輪子周長除以輪子轉(zhuǎn)一圈的脈沖數(shù),二、可以測量10圈輪子累積脈沖,求平均值。
(2)測速的技術(shù)要求:
(1)盡量精細(xì)化速度分辨率。所以采用T法測速
(2)計(jì)算出輪子的實(shí)際線速度m/s,而不是電機(jī)的轉(zhuǎn)速。所以要明確兩個(gè)脈沖對應(yīng)輪子轉(zhuǎn)動的物理距離。
(3)用速度的正負(fù)值明確分辨輪子正反轉(zhuǎn)。所以要根據(jù)判斷前后霍爾組合狀態(tài)來判斷電機(jī)所謂的正反。
(3)實(shí)現(xiàn)方式:
首先,通過單片機(jī)的外部觸發(fā)中斷,獲得同一觸發(fā)時(shí)刻的三個(gè)霍爾信號狀態(tài)并通過二進(jìn)制組合成狀態(tài)數(shù)字;根據(jù)下一次的狀態(tài)數(shù)字,進(jìn)行速度正反的區(qū)分。
其次,通過單片機(jī)的定時(shí)計(jì)數(shù)器,測算每兩個(gè)脈沖之間的時(shí)間。即一個(gè)上升沿到一個(gè)下降沿的時(shí)間,或者一個(gè)下降沿到上升沿的時(shí)間,或者一個(gè)下降沿到一個(gè)下降沿的時(shí)間等等。
最后,進(jìn)行速度計(jì)算,符號改變即可。
注意,這里說的每兩個(gè)脈沖不是一個(gè)霍爾的每兩個(gè)脈沖而是三個(gè)霍爾中的每兩個(gè)脈沖,這個(gè)脈沖既包括上升沿又包括下降沿。
(4)使用設(shè)備以及軟件:
STM32F103單片機(jī) + 120度霍爾的無刷有感電機(jī) + keil5。
(5)具體代碼實(shí)現(xiàn):
下面以一個(gè)電機(jī)為例,具體的源碼工程文件。
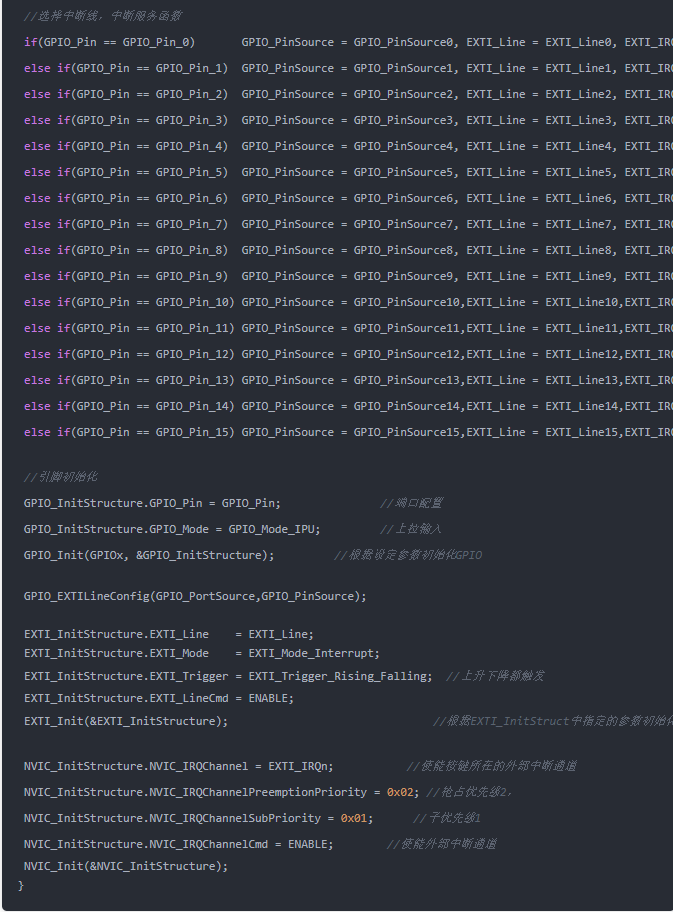
外部中斷配置代碼:
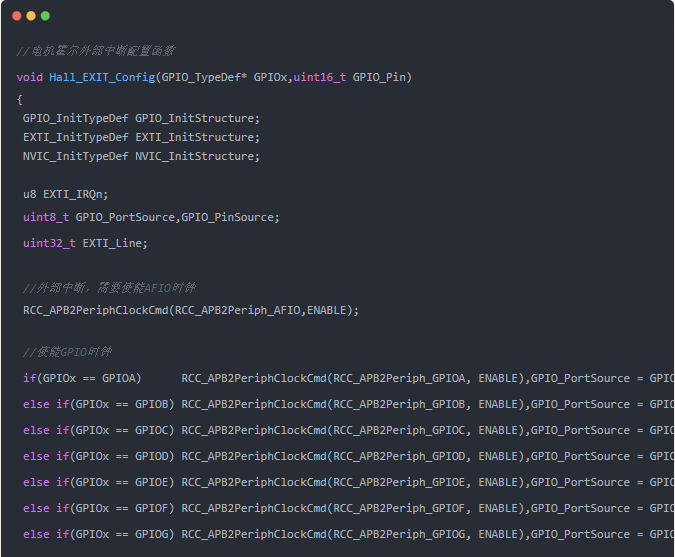
?
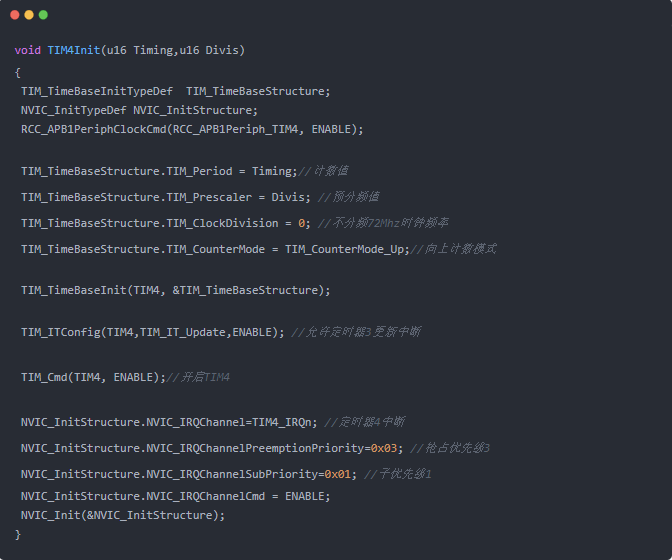
定時(shí)器配置代碼:
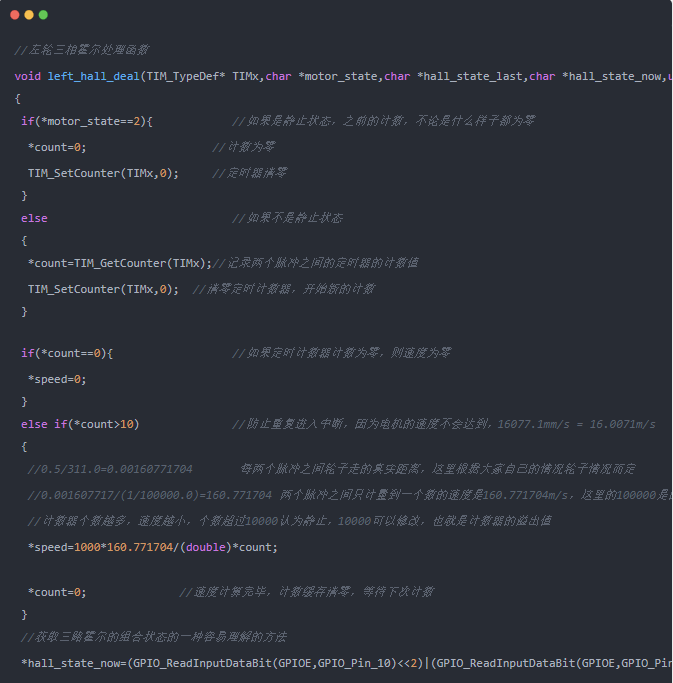
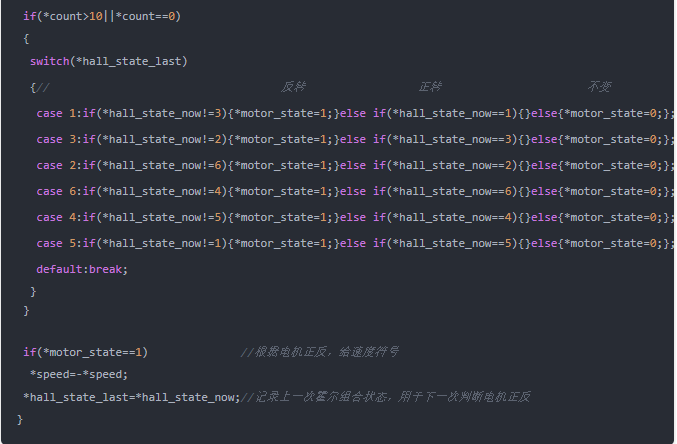
左輪三相霍爾處理函數(shù):
?
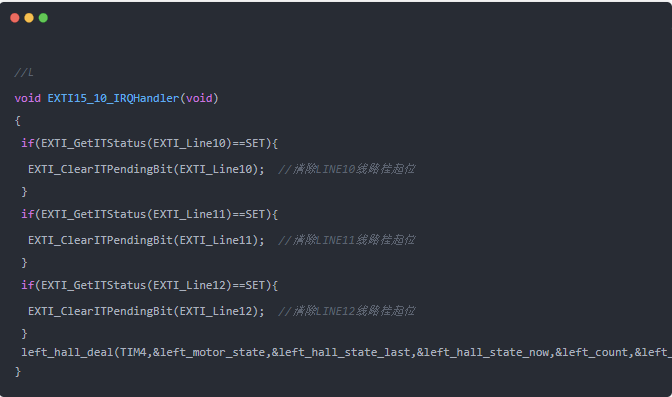
左輪三相霍爾中斷服務(wù)函數(shù):
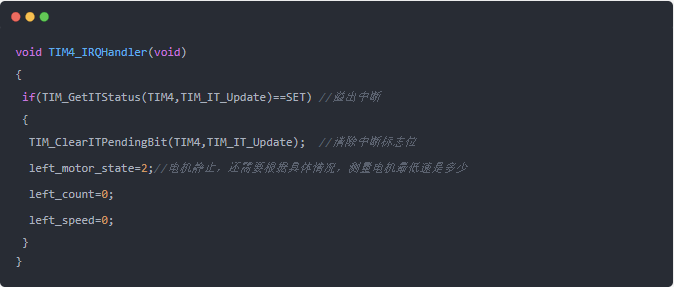
定時(shí)器中斷服務(wù)函數(shù):
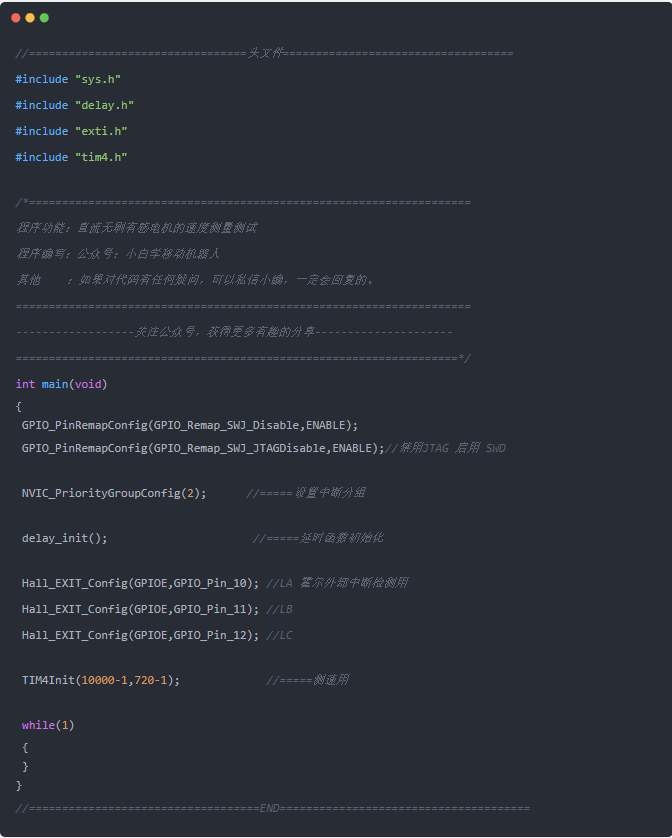
主函數(shù):
3.STM32無刷電機(jī)速度PID閉環(huán)控制
關(guān)于無刷電機(jī)的速度閉環(huán)控制和有刷直流除了速度測量之外沒有區(qū)別。









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論