 電子發(fā)燒友App
電子發(fā)燒友App


內(nèi)燃機在傳統(tǒng)汽車中出現(xiàn),因為主要牽引元件消失了,取而代之的是新的解決方案,電動機和電池處于場景的中心。這要歸功于電池技術(shù)的發(fā)展,該技術(shù)允許創(chuàng)建能夠以較低成本為合理自主提供能量的系統(tǒng)。此外,內(nèi)燃機無疑是產(chǎn)生CO2的原因之一。
電動機:它是什么以及它是如何工作的
與電池一起,電動機是將電能轉(zhuǎn)換為機械能以進行運動的系統(tǒng)的一部分。我們當然可以說它代表了汽車或電動汽車的心臟。然而,有不同類型的電動機用于此目的。那么發(fā)動機應(yīng)該是怎樣的呢?哪些功能使其更好或更適合電動汽車應(yīng)用?
電動機必須:
- 能夠從零速開始產(chǎn)生顯著的扭矩;
- 確保顯著的峰值功率具有與傳統(tǒng)汽車相媲美的性能;
- 具有盡可能簡單的先導系統(tǒng)和電動機控制;
- 輕巧緊湊;
- 成本有限;
- 具有高效率水平;
- 在使車輛減速的同時充當發(fā)電機。
綜上所述,理想的牽引應(yīng)用發(fā)動機必須具備高啟動扭矩、高功率密度、高能效等優(yōu)良特性。基于特定技術(shù),不同類型的引擎提供不同程度的功能。
發(fā)動機和動力總成:含義
但是讓我們簡要地澄清一下。什么是發(fā)動機,什么是動力總成?動力總成是什么意思?在汽車和運輸應(yīng)用中(圖 1),發(fā)動機需要一系列組件來產(chǎn)生動力并將動力傳遞給車輛的移動方式(例如道路,但也包括空氣或水)。因此,我們所說的動力總成是指發(fā)動機、其部件(電源、冷卻系統(tǒng)、點火裝置、電池等)和變速器。
我們隨后將只關(guān)注發(fā)動機,如前所述,它代表了電動汽車的跳動心臟。
 圖1:典型電動汽車的結(jié)構(gòu)
圖1:典型電動汽車的結(jié)構(gòu)不同類型的電動機
在我們可以找到的電動機類型中:
電機分類
直流電機
直流電機(見圖 2)應(yīng)按順序提及,因為它們是上個世紀上半葉廣泛用于牽引應(yīng)用的第一批電機。它們具有積極的方面:啟動時的高扭矩、支持負載突然增加的能力、簡單的速度控制、簡單的結(jié)構(gòu)和低成本。但是有一個很大的缺點:需要在旋轉(zhuǎn)部件上安裝電觸點,即電刷,以允許切換轉(zhuǎn)子繞組上的極性。
由于這些原因,它們被稱為有刷電機,因此,由于碳刷的消耗,它們需要經(jīng)常維護。這實際上使它們退出了這些類型的應(yīng)用程序的市場。
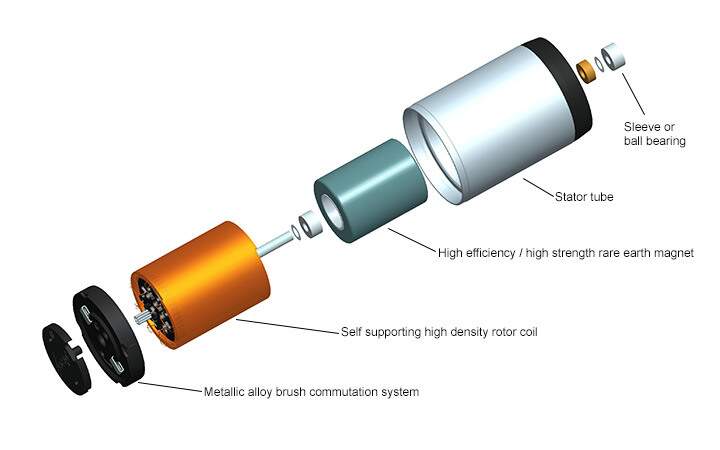 圖 2:有刷直流電機的結(jié)構(gòu)
圖 2:有刷直流電機的結(jié)構(gòu)?
無刷直流電機
無刷電機不需要有刷電機所需的維護。它們的特點與直流電相似:出色的啟動扭矩、高能效、高達 95/98% 的功率密度(kW / dm3),允許在相同的功率發(fā)展下具有特別緊湊的尺寸。
對于這些特性,它們是應(yīng)用中的首選電機類型,電動自行車和中功率兩輪,其中緊湊性因素是基礎(chǔ)。
在有刷電機中,后者通過換向器將電流傳送到位于轉(zhuǎn)子上的繞組,該換向器執(zhí)行適當?shù)囊龑Чδ堋?/font>在 BLDC 電機中,繞組不在轉(zhuǎn)子上,而是在定子上,即固定部分,而包含永磁體的是轉(zhuǎn)子。
由于繞組是靜態(tài)的,因此不需要電刷和旋轉(zhuǎn)開關(guān)的組合。
在有刷電機中,通過控制構(gòu)成轉(zhuǎn)子的繞組產(chǎn)生的磁場來實現(xiàn)旋轉(zhuǎn),而構(gòu)成定子的產(chǎn)生的磁體是固定的。
要改變轉(zhuǎn)速,您需要改變繞組中的電壓或電流,從而改變轉(zhuǎn)子中產(chǎn)生的磁場強度。
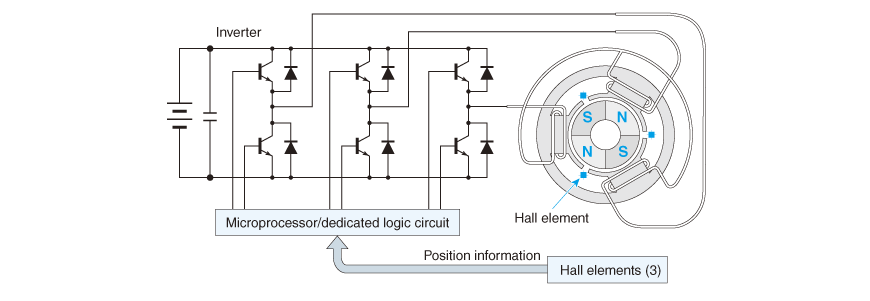 圖 3:無刷直流電機的結(jié)構(gòu)和典型的先導電路
圖 3:無刷直流電機的結(jié)構(gòu)和典型的先導電路在 BLDC 電機中,永磁體移動,并且通過移動由固定定子繞組產(chǎn)生的磁場來獲得旋轉(zhuǎn)。
圖 3 顯示了 BLDC 電機的典型結(jié)構(gòu):定子上的三個繞組,通常有一個通過端子的點。同一圖顯示了典型的驅(qū)動電路,其中突出顯示了組件,在這種情況下,我們可以看到充當開關(guān)的晶體管。
一方面,它們將 BLDC 端子連接到直流電壓的正極,而另一方面,它們?nèi)匀贿B接到電源的負極。在所示的序列中,磁場通過拖動轉(zhuǎn)子的永磁結(jié)構(gòu)來追逐它,從而完成一個完整的旋轉(zhuǎn)。所示的每個階段都必須出現(xiàn)在轉(zhuǎn)子的精確位置,以獲得最大扭矩。為此,一個信號顯示了先導電路和轉(zhuǎn)子的位置,以激活正確的相位。圖 3 中的圖表指示霍爾傳感器作為負責此功能的單元,但其他解決方案也是可能的,例如光學編碼器或稱為旋轉(zhuǎn)變壓器的單元。
BLDC 電機,尤其是在牽引領(lǐng)域,有兩種形式:內(nèi)轉(zhuǎn)子(內(nèi)轉(zhuǎn)子)或外轉(zhuǎn)子(外轉(zhuǎn)子)。在第一種情況下,該實施例類似于圖 3 中概述的形狀,它需要一個外部傳動系統(tǒng)來將動力傳遞到車輪,因此會占用更多的車內(nèi)空間。
這些仍然與外部轉(zhuǎn)子版本(外轉(zhuǎn)子)形成對比,轉(zhuǎn)子和定子交換位置。帶有勵磁繞組的定子在內(nèi)部,但是帶有永磁體的轉(zhuǎn)子在外部旋轉(zhuǎn),從而使輪子可以直接安裝在外部轉(zhuǎn)子上,從而節(jié)省了傳遞運動所需的機械零件.
步進電機
步進電機是直流無刷電機系列的一部分,在需要運動精度和可重復性的中小功率領(lǐng)域占據(jù)主導地位。它們也易于使用并且在制造商中廣泛使用。
步進電機是無刷直流電機系列的一部分。它們沒有執(zhí)行改變轉(zhuǎn)子繞組中電流方向的功能的電刷。另一方面,在這些電機中,所有繞組都是定子的一部分,而轉(zhuǎn)子是通過適當組裝永磁體制成的。
只有在不廣泛使用的可變磁阻電機的情況下,轉(zhuǎn)子才代替了導磁材料。作為無刷電機,所有的開關(guān)操作都必須通過合適的外部控制電路進行。
它們的角分辨率范圍很廣:從每一步旋轉(zhuǎn) 90° 的粗略,到通常能夠 1.8° 相位或每轉(zhuǎn) 200 步的分辨率的永磁電機的堅固性,甚至 0.72°(500 步分辨率)。
圖 4 表示具有 4 線雙極連接的兩相步進電機的簡化結(jié)構(gòu)。定子有四個磁極,繞組立在其上。當電流通過時,它會產(chǎn)生一個磁場,使轉(zhuǎn)子的永磁體與其對齊
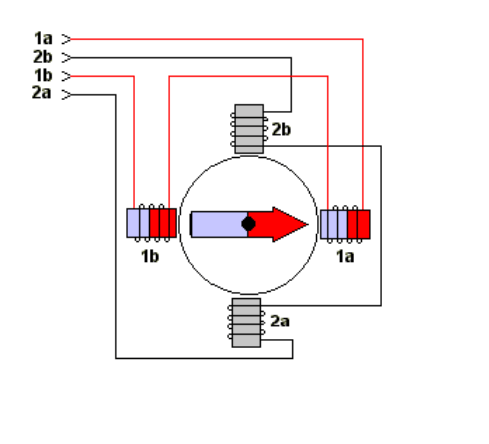 圖 4:步進器的簡化結(jié)構(gòu)
圖 4:步進器的簡化結(jié)構(gòu)通過依次移動不同繞組的通電,旋轉(zhuǎn)磁場共存以拖動轉(zhuǎn)子。步進電機符號源自這種結(jié)構(gòu):一個圓圈代表轉(zhuǎn)子,兩個相互垂直的電感代表繞組,在圖 4 的理想化中,它們實際上是相互正交的。
圖 5 顯示了將各種繞組連接到外部的最常用方法。“4線”被定義為雙極,因為需要通過反轉(zhuǎn)施加的極性來驅(qū)動繞組以改變磁場的方向。
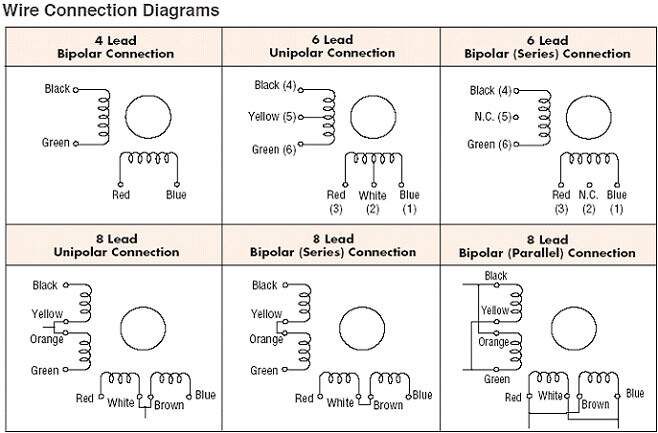 圖 5:最常見的步進電機繞組連接方案
圖 5:最常見的步進電機繞組連接方案“6 線”配置是最常見的,即位于一對相對磁極上的兩半繞組之間的連接。在這種情況下,通過將繞組的一端交替接地來實現(xiàn)磁場的反轉(zhuǎn)。
“8 線”版本具有最大的靈活性:可以獲得兩個半繞組串聯(lián)或并聯(lián)的雙極配置,以及單極解決方案。
駕駛技術(shù)
驅(qū)動電機繞組有四種不同的可能方式:
- 1 相開(或波驅(qū)動),
- 2 相開啟(或全步),
- 半步(或階段 1 和 2 ON),
- 微步。
1 階段(或波驅(qū)動)
在下圖中(見圖 6),使用了兩相步進電機的簡化結(jié)構(gòu),使工作原理更易于理解。轉(zhuǎn)子(綠色箭頭表示北極)是一個兩極磁鐵。在定子中,四 (4) 個磁極交替顯示為綠色,以指示相關(guān)繞組產(chǎn)生磁化,將磁南側(cè)轉(zhuǎn)向轉(zhuǎn)子(以拉動轉(zhuǎn)子的磁北)。
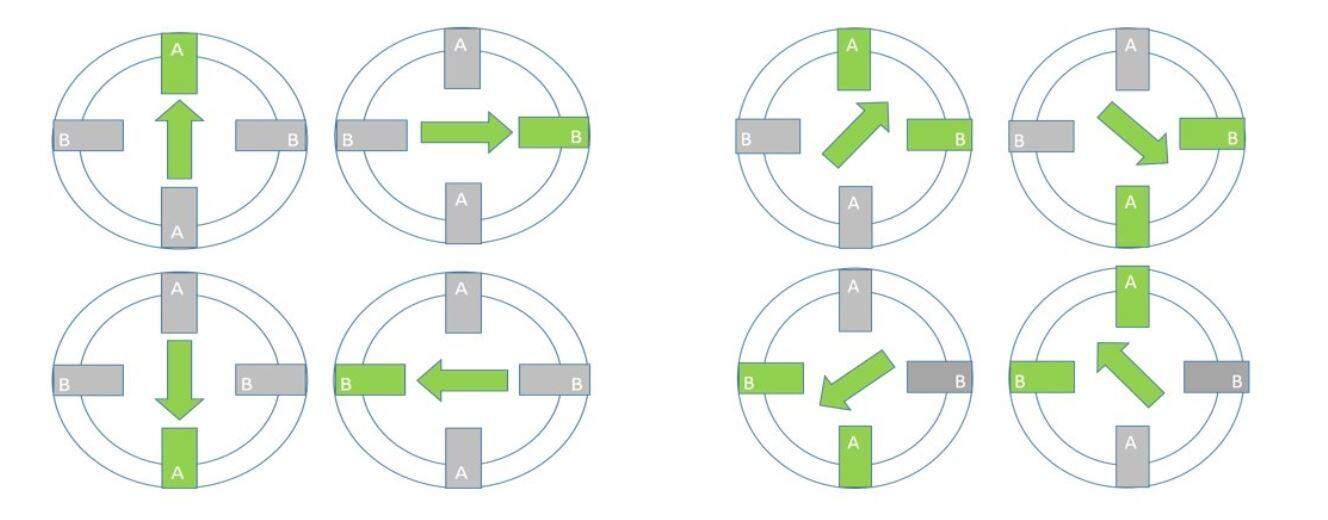 圖 6:全步(來源:RS)
圖 6:全步(來源:RS)在這種類型的引導中,一次僅在一個序列中存在一個階段。當 A 相升壓時,轉(zhuǎn)子保持與其對齊。當 A 相關(guān)閉時,B 相被激活,轉(zhuǎn)子旋轉(zhuǎn) 90°,如圖 5 中的步驟 2 所示。因此,需要四 (4) 個步驟才能完成一圈。對于分辨率為 200 步/轉(zhuǎn) (1.8 = (360° / 50) / 4) 的步進電機,這相當于旋轉(zhuǎn) 1.8°。
2 相開啟(或全步)
總是有兩個(相鄰)階段活動檢查圖 6(右)。在存在兩相同時活躍的情況下,轉(zhuǎn)子受到兩個吸引力。在圖 5 的情況下,功率是在中午,而具有相同強度的第二個是在與第一個正交的方向上。這兩個矢量的和產(chǎn)生一個 45° 的結(jié)果,其值為單相產(chǎn)生的磁場的 1.41 倍。此外,步距角為 90°,與“1 相開啟”的情況一樣,但扭矩提高了 41%。然而,這也涉及雙耗散功率,因為??兩個繞組同時被激活。如果管理不當,可能會導致發(fā)動機過熱。
半步(或階段 1 和 2 ON)
在這種情況下,將前兩種方法結(jié)合起來,首先單獨激活一個階段,然后同時觸發(fā)這兩個階段。在這種情況下,每一步對應(yīng)一個 45° 的旋轉(zhuǎn),是前兩種情況的一半(因此得名“半步”)。因此需要八個階段來完成一個旋轉(zhuǎn)。
微步
從半步驅(qū)動開始,您可以進行角度分辨率甚至變化的驅(qū)動,即具有更包含值的步。如果我們考慮控制兩個有源繞組中的電流,從而控制磁場強度,我們可以確保兩個磁場的合成矢量位于特定角度。
一旦 A 相處于最大功率且 B 相處于零電平,轉(zhuǎn)子與 A 相對齊。隨著 A 相電流減小并同時 B 相電流增加,轉(zhuǎn)子將向 B 相移動其定位。A 和 B達到最大電流時對齊,而 A 相已達到零。
一些集成電路制造商提供的組件能夠使用微步進技術(shù)驅(qū)動步進電機,因此能夠提供電流。μsteps / step 的數(shù)量通常可編程為 1(全步)、2(半步)、4、8(但也高達 256)。
微步進的另一個缺點仍然是獲得高轉(zhuǎn)速所需的工作頻率的倍增。例如,在分辨率為 200 步的電機中使用 128 μsteps/整步,總共需要 200 x 128 = 25600 μsteps 才能完成旋轉(zhuǎn)。如果首選 6000 rpm (100 rpm) 的轉(zhuǎn)速,則掃描 μsteps 的順序應(yīng)為 2.56 Mhz (25.600 x 100 = 2.560.000 Hz)。
步進電機的類型、結(jié)構(gòu)、操作和特性
步進電機按結(jié)構(gòu)分為三種:
- 永磁步進電機;
- 可變磁阻步進電機;
- 混合式步進電機。
永磁步進電機
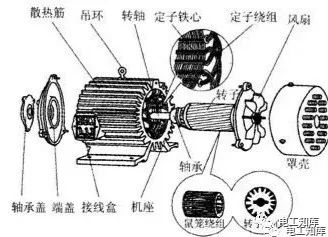
它們由轉(zhuǎn)子組成,轉(zhuǎn)子的外圓周由極性相反的永磁體并排排列,磁通量的徑向平行于轉(zhuǎn)子的軸線。定子帶有繞組,繞組依次被驅(qū)動以拖動轉(zhuǎn)子。
最常用于此類電機的機械結(jié)構(gòu)稱為“可堆疊”,其定子形狀如圖 7 所示。
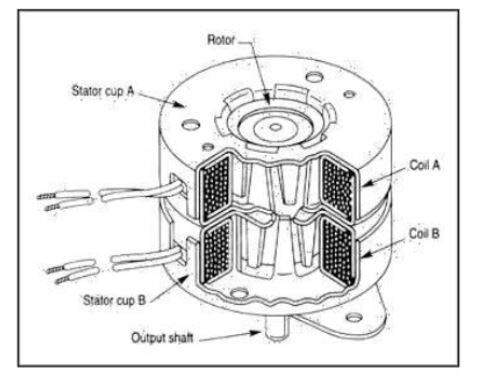 圖 7:永磁步進電機
圖 7:永磁步進電機電機只有兩個繞組,兩相各有 20 個極。每 360° / 20 = 18° 一個極點,代表步距角。繞組的每一相都與一個環(huán)形低碳鋼鎧裝共存——在內(nèi)環(huán)上,有 20 個與電機軸方向相同的定子磁極。這些定子磁極呈爪形(因此也稱為“爪形步進電機”),并且由于它們的錐形形狀,它們傾向于將磁通量集中在爪形最窄的部分。每個爪或齒,當它是活動相的一部分時,顯示出一個磁極,與相鄰的相反極交替。這種南北齒交替吸引永轉(zhuǎn)子磁鐵。第二個定子具有相同的結(jié)構(gòu),但與第一個定子相比,相位相差半個俯仰角或九度。
可變磁阻步進電機
這些類型的特點是它們在轉(zhuǎn)子或定子中沒有永磁體,并且它們的結(jié)構(gòu)是有史以來最簡單的。您可以在圖 8 中看到這一點,它代表了一個三相 RV 步進器,
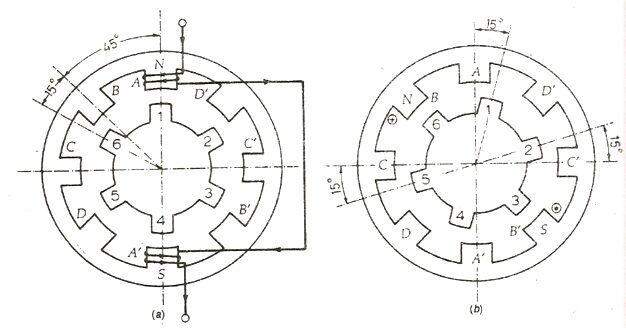 圖 8:可變磁阻步進電機
圖 8:可變磁阻步進電機定子由模制硅鋼片制成,定子極數(shù)為偶數(shù)或奇數(shù)(通常為偶數(shù))。每個定子極帶有一個勵磁繞組。如果磁極均勻記錄,則相反磁極的曲折串聯(lián)起來,使磁場加強,兩者結(jié)合為電動機的一相。
轉(zhuǎn)子由壓制的硅鋼板組成,這些鋼板向齒或磁極的外側(cè)突出,不帶繞組。這些極數(shù)必須與定子極數(shù)不同,才能啟動電機并觸發(fā)雙向旋轉(zhuǎn)。
有多個堆疊電機,它們被視為具有相同軸的不同 RV 電機,以增加角分辨率。最常見的配置有三個單元,數(shù)量也可以達到七個。假設(shè) m 是單元數(shù),則每個定子與相鄰定子的相位相差 360°/m。但是,如果我們逐步淘汰相等值的轉(zhuǎn)子磁極并保持定子磁極對齊,則情況相同
RV 步進器提供的一個優(yōu)勢是成本相對較低,這通常會受到低水平扭矩的影響。
雜交種
混合動力馬達
混合電機結(jié)合了永磁步進電機的優(yōu)點和可變磁阻的優(yōu)點。混合版本的結(jié)構(gòu)比前兩種類型復雜得多。
首先值得注意的是,轉(zhuǎn)子在其軸上具有永磁體,其磁取向與轉(zhuǎn)子軸本身的取向相同。在永磁體的每個磁極上,都有一個齒形結(jié)構(gòu)——前齒杯和后齒杯——彼此分開,并有半個齒距的角度偏移。
齒數(shù)決定步進電機的步數(shù)。在一個完整的旋轉(zhuǎn)中,所有的轉(zhuǎn)子齒將匹配相同的定子極。因此,每轉(zhuǎn)的步數(shù)是兩個轉(zhuǎn)子杯中的齒的典型值,這是一個四相電機導致一些步數(shù)。
對于高分辨率,即小步距角,但相位數(shù)量有限,不是制造許多小定子磁極,而是制造更大的定子磁極并將其分成更多具有齒距的“齒”。在規(guī)則節(jié)距的情況下,連續(xù)相的磁極必須具有每個定子磁極可以包含的最大齒數(shù)。
工作原理
15齒轉(zhuǎn)子有一段在永磁體的南極(圖中藍色部分)和另一部分在北側(cè)(紅色側(cè)),偏移半步。通過偏移,轉(zhuǎn)子具有 30 個相反極性的交錯磁極。這個相同的偏移允許在相位的極性反轉(zhuǎn)時旋轉(zhuǎn) 1/30 的轉(zhuǎn)角。四 (4) 個極的定子齒對應(yīng)于 15 個轉(zhuǎn)子齒。除了在定子之間的空間中的齒。因此,轉(zhuǎn)子的一極,例如南極,可以在 15 個不同的位置與定子對齊。與另一端的轉(zhuǎn)子齒相比,南極上的轉(zhuǎn)子齒偏移了半步。因此,轉(zhuǎn)子可以在 30 個不同的位置與定子對齊。
如果我們現(xiàn)在查看定子的主極,定子相位是四分之一 (?) 齒異相。結(jié)果是,當分段一個接一個地加強時,轉(zhuǎn)子以 1/4 齒步長移動。換句話說,要完成一圈旋轉(zhuǎn),轉(zhuǎn)子必須從 ? 前進 2 x 30 = 60 步。
以下注釋說明了隨后激活兩個電機相位所產(chǎn)生的四分之一 (?) 齒旋轉(zhuǎn)。
簡單來說:
- 它們可以達到非常小的步距角,而不需要大量的相位。
- 出色的動態(tài)性能
- 由于磁化和磁阻的結(jié)合產(chǎn)生了出色的扭矩
| 范圍 | 永磁體 | 可變磁阻 | 雜種 |
| 速度 | 低的 | 高的 | 很高 |
| 螺紋摩擦力矩 | 高的 | 最低(無) | 平均 |
| 同步扭矩 | 低的 | 平均 | 高的 |
| 轉(zhuǎn)子慣量 | 高的 | 低的 | 低的 |
| 沒有步驟/轉(zhuǎn) | 低的 | 高的 | 高的 |
| 角度精度 | 低的 | 平均 | 高的 |
| 最常見的步距角 | 7.5°9°15°18° | 1.8°7.5°15° | 0.9° 1.8° 3.6° |
| 效率 | 好的 | 低的 | 出色的 |
| 動態(tài)性能(扭矩/慣性) | 好的 | 有限的 | 高的 |
| 噪音水平 | 不過度 | 高的 | 有限的 |
| 駕駛 | 全步、半步和微步 | 通常只有全步 | 全步、半步和微步 |
| 施工復雜性(成本) | 中高(1) | 低的 | 高的 |
審核編輯:湯梓紅










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論