與傳統(tǒng)步進(jìn)電機(jī)驅(qū)動(dòng)器IC相比,NCV70522包含BEMF輸出,能夠?qū)崟r(shí)地準(zhǔn)確地反應(yīng)電機(jī)運(yùn)轉(zhuǎn)情況,非常適合汽車自適應(yīng)前照燈系統(tǒng)中的應(yīng)用。堵轉(zhuǎn)檢測(cè)閾值可以根據(jù)電機(jī)速度、負(fù)載特性及供電電壓的不同來(lái)調(diào)節(jié)
2013-01-28 11:51:05 4484
4484 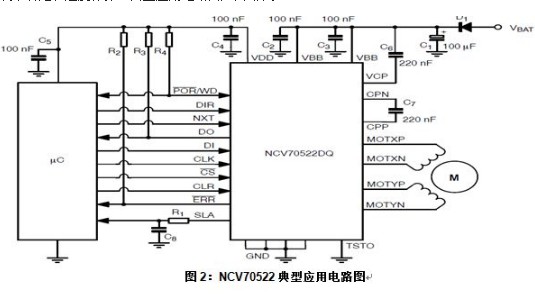
步進(jìn)電機(jī)相電流的測(cè)量是一項(xiàng)涉及電子和機(jī)械技術(shù)的重要工作,主要用于確保電機(jī)正常運(yùn)轉(zhuǎn)、故障診斷和優(yōu)化電機(jī)性能。下面將為您提供一篇詳盡、詳實(shí)、細(xì)致的關(guān)于步進(jìn)電機(jī)相電流測(cè)量的文章。 一、步進(jìn)電機(jī)相電流測(cè)量
2023-12-13 15:47:241070 越大。在它的作用下,電機(jī)隨頻率(或速度)的增大而相電流減小,從而導(dǎo)致力矩下降。8.為什么步進(jìn)電機(jī)低速時(shí)可以正常運(yùn)轉(zhuǎn),但若高于一定速度就無(wú)法啟動(dòng),并伴有嘯叫聲? 步進(jìn)電機(jī)有一個(gè)技術(shù)參數(shù):空載啟動(dòng)頻率,即
2014-01-21 14:55:59
步進(jìn)電機(jī)可以連續(xù)運(yùn)轉(zhuǎn)嗎?步進(jìn)電機(jī)長(zhǎng)時(shí)間連續(xù)運(yùn)轉(zhuǎn)會(huì)致使電機(jī)溫度上升,當(dāng)超過(guò)電機(jī)內(nèi)部的耐熱等級(jí),會(huì)使得絕緣性能劣化。當(dāng)使用步進(jìn)電機(jī)時(shí)只要保持電機(jī)外殼表面溫度在100度以下,即可連續(xù)運(yùn)轉(zhuǎn)。您可通過(guò)以下
2021-07-08 07:21:56
是以“步”為單位旋轉(zhuǎn)的,數(shù)字特征比較明顯,這樣就給計(jì)算機(jī)控制帶來(lái)了很大的方便,反過(guò)來(lái),計(jì)算機(jī)的出現(xiàn)也為步進(jìn)電機(jī)開(kāi)辟了更為廣闊的使用市場(chǎng);三是整機(jī)結(jié)構(gòu)簡(jiǎn)單。傳統(tǒng)的機(jī)械速度和位置控制結(jié)構(gòu)比較復(fù)雜,調(diào)整困難
2018-10-12 10:57:16
步進(jìn)電機(jī)控制系統(tǒng)設(shè)計(jì)一個(gè)開(kāi)環(huán)步進(jìn)電機(jī)控制系統(tǒng)。使得步進(jìn)電機(jī)能夠正常運(yùn)轉(zhuǎn)。并能實(shí)現(xiàn)啟停、正反轉(zhuǎn)、調(diào)速控制。以及顯示速度。2.設(shè)計(jì)要求如下:①硬件測(cè)試通過(guò)。接線完成。三個(gè)芯片分別測(cè)試通過(guò)。步進(jìn)電機(jī)
2021-06-29 06:48:40
有人又給小編我留言了說(shuō)我不知道步進(jìn)電機(jī)驅(qū)動(dòng)器的電流調(diào)節(jié)有沒(méi)有一個(gè)固定的標(biāo)準(zhǔn),對(duì)于肯定是有的了,在這里回答一下,也希望可以幫到可以幫助的朋友。 其實(shí)很簡(jiǎn)單的啦,這個(gè)只需要撥碼器開(kāi)關(guān)就可以去調(diào)節(jié)
2017-04-27 14:05:34
電機(jī)到底有哪幾種類型?電機(jī)以步進(jìn)形式運(yùn)轉(zhuǎn)具有什么優(yōu)點(diǎn)?
2021-10-13 06:43:47
什么是步進(jìn)電機(jī)?具有哪些優(yōu)缺點(diǎn)?步進(jìn)電機(jī)的工作原理是什么?有哪些種類?電機(jī)實(shí)際的運(yùn)轉(zhuǎn)過(guò)程是怎樣的?
2021-10-19 09:08:12
要控制兩臺(tái)步進(jìn)電機(jī)同步進(jìn)行運(yùn)轉(zhuǎn),即同時(shí)起步,同時(shí)加速,同時(shí)到達(dá)最大速度,同時(shí)減速,最后同時(shí)停止。這是要有一定的算法的:假如B1電機(jī)所走的路程是B2的n倍,在同時(shí)起步的前提下,v1=n*v2,a1=n
2021-07-08 08:29:24
描述TIDA-00830 提供了稱為 AutoTune? 的 TI 自動(dòng)步進(jìn)電機(jī)調(diào)節(jié)功能的應(yīng)用概覽。此設(shè)計(jì)展示 AutoTune 如何快速適應(yīng)系統(tǒng)輸入或電機(jī)特征的變化而讓用戶不必應(yīng)用任何類型的參數(shù)
2018-09-05 08:54:48
(CH423_OC_L_CMD, Ch423_Output.v)我連續(xù)寫(xiě)0C的低8位(OC0~7)和高8位(OC8~15),在我寫(xiě)高8位的時(shí)候總是會(huì)把0C7的電平反過(guò)來(lái),OC8~15是正常的,這
2022-10-12 07:27:46
資料上說(shuō)bgr就是把rgb反過(guò)來(lái)用。我不明白為什么要反過(guò)來(lái),在哪可以看到它需要反過(guò)來(lái),誰(shuí)能告訴我是怎么回事?
2015-01-16 10:43:20
,但是BOOT中也是反過(guò)來(lái)進(jìn)行的,這是為什么呢?OMAPL138在加電BOOT時(shí),PSC已經(jīng)配置,這時(shí)ARM不是被禁止的嗎?它是怎么樣啟動(dòng)還去喚醒DSP的呢?謝謝。
2020-08-11 11:27:25
有刷電機(jī)驅(qū)動(dòng)電路有刷電機(jī)是電機(jī)里面最簡(jiǎn)單,也是歷史最悠久的一種,到現(xiàn)在仍然廣泛應(yīng)用于各個(gè)領(lǐng)域。他的控制很簡(jiǎn)單,在電機(jī)的兩個(gè)電極加正向電壓,則正向旋轉(zhuǎn),如果加反向電壓,則旋轉(zhuǎn)方向也反過(guò)來(lái)。電機(jī)的轉(zhuǎn)速
2021-06-30 08:04:34
那些在運(yùn)行過(guò)程中移動(dòng)距離和速度均確定的具體設(shè)備,小編認(rèn)為采用PLC通過(guò)步進(jìn)電機(jī)驅(qū)動(dòng)器來(lái)控制步進(jìn)電機(jī)的運(yùn)轉(zhuǎn)是一種理想的技術(shù)方案。步進(jìn)電機(jī)的特點(diǎn):(1)步進(jìn)電機(jī)的角位移與輸入脈沖數(shù)嚴(yán)格...
2021-06-29 06:53:19
都會(huì)設(shè)有調(diào)節(jié)細(xì)分?jǐn)?shù)設(shè)置的開(kāi)關(guān),對(duì)照設(shè)置表?yè)軇?dòng)相應(yīng)的設(shè)置開(kāi)關(guān)就可以方便設(shè)置想要的細(xì)分?jǐn)?shù)。兩相步進(jìn)電機(jī)驅(qū)動(dòng)器設(shè)置表會(huì)有2種形式,一種是細(xì)分?jǐn)?shù),另一種則是直接給出不同細(xì)分?jǐn)?shù)下每一圈所需要的脈沖數(shù)(一般是以
2023-03-13 14:16:17
現(xiàn)在我用串口通信能夠控制步進(jìn)電機(jī)進(jìn)行正常運(yùn)轉(zhuǎn),現(xiàn)在希望通過(guò)Labview實(shí)現(xiàn)控制驅(qū)動(dòng),實(shí)現(xiàn)電機(jī)能夠每隔一定時(shí)間轉(zhuǎn)動(dòng)一定角度,停下一定時(shí)間在繼續(xù)轉(zhuǎn)動(dòng)一定角度,如此循環(huán)下去,求高手指導(dǎo)
2014-04-03 09:28:54
,即其脈沖當(dāng)量為360度/131072=0.00274658度,是步距角為1.8度的步進(jìn)電機(jī)脈沖當(dāng)量的1/655.2.低頻特性不同兩相混合式步進(jìn)電動(dòng)機(jī)在低速運(yùn)轉(zhuǎn)時(shí)易出現(xiàn)低頻振動(dòng)現(xiàn)象(因?yàn)?b class="flag-6" style="color: red">步進(jìn)電機(jī)是...
2021-06-28 09:56:07
我使用ADI7180做三路CVBS輸入,decoder是瑞芯微的RK3288, 顯示出現(xiàn)的圖像中,紅色與藍(lán)色反過(guò)來(lái)了;
請(qǐng)教ADV7180中,是那個(gè)寄存器控制色彩設(shè)置?
感謝
2023-12-05 07:22:12
使用單片機(jī)進(jìn)過(guò)驅(qū)動(dòng)器控制步進(jìn)電機(jī),當(dāng)驅(qū)動(dòng)任意兩個(gè)步進(jìn)電機(jī)的時(shí)候,電機(jī)運(yùn)轉(zhuǎn)正常,然而當(dāng)驅(qū)動(dòng)三個(gè)步進(jìn)電機(jī)的時(shí)候,全部震動(dòng)切運(yùn)轉(zhuǎn)速度較慢,
2016-07-15 17:12:43
想用一個(gè)驅(qū)動(dòng)器控制兩臺(tái)不同時(shí)運(yùn)轉(zhuǎn)的步進(jìn)電機(jī),有可能否?可行的話,硬件如何接線?可用繼電器直接控制驅(qū)動(dòng)器的輸出否?
2023-12-25 06:16:16
大俠們,請(qǐng)你們幫忙看看這圖中電機(jī)是不是步進(jìn)電機(jī)?如何才能使它運(yùn)轉(zhuǎn)起來(lái)。那個(gè)小的集成電路板是起什么作用?謝謝啦。
2013-11-05 06:33:33
在通信線路中可不可以把二功分器反過(guò)來(lái)當(dāng)做合路器用?可以的話,損耗和合路器有什么區(qū)別?
2023-03-07 17:21:04
工作方式STM32的PWM控制步進(jìn)電機(jī)運(yùn)轉(zhuǎn)的實(shí)質(zhì)STM32庫(kù)函數(shù)配置Main.cLed.cLed.hTimer.cTimer.h基于STM32的步進(jìn)電機(jī)實(shí)驗(yàn)步進(jìn)電機(jī)介紹步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制元步進(jìn)電機(jī)件。在非超載的情況.
2021-06-29 06:13:15
外部按鍵中斷是如何調(diào)節(jié)步進(jìn)電機(jī)速度的?Arduino uno控制板與步進(jìn)電機(jī)是怎樣進(jìn)行接線的?
2021-10-15 09:28:33
可以通過(guò)調(diào)節(jié)頻率來(lái)調(diào)節(jié)步進(jìn)電機(jī)的轉(zhuǎn)速嗎?占空比對(duì)于步進(jìn)電機(jī)有什么意義呢?如何利用PWM模塊來(lái)調(diào)節(jié)步進(jìn)電機(jī)不同的轉(zhuǎn)速?
2021-12-20 07:48:55
28BYJ步進(jìn)電機(jī)的配置流程是怎樣的?STM32的PWM控制步進(jìn)電機(jī)運(yùn)轉(zhuǎn)的實(shí)質(zhì)是什么?如何利用PWM模塊來(lái)調(diào)節(jié)步進(jìn)電機(jī)不同的轉(zhuǎn)速?
2021-10-15 08:48:20
的AC電動(dòng)機(jī)和伺服電動(dòng)機(jī)的功率(W)是指電動(dòng)機(jī)在“額定轉(zhuǎn)速”下運(yùn)轉(zhuǎn)時(shí)的功率(W),即“額定功率”。步進(jìn)電機(jī)一般在較大范圍內(nèi)調(diào)速使用、其功率是變化的,代入不同的轉(zhuǎn)速算出的功率(W)也會(huì)有所不同一般只用...
2021-07-08 09:01:54
如何在數(shù)碼管顯示溫度的時(shí)候,通過(guò)一個(gè)閾值控制步進(jìn)電機(jī)的運(yùn)轉(zhuǎn)。目前我的問(wèn)題是,數(shù)碼管顯示溫度傳感器的同時(shí)步進(jìn)電機(jī)再運(yùn)轉(zhuǎn)就會(huì)發(fā)生兩者都不能正常工作,像 數(shù)碼管一山一閃的,電機(jī)一顫一顫的。求各位大神傳教一下啊
2018-04-16 14:03:55
如何實(shí)現(xiàn)51單片機(jī)調(diào)節(jié)步進(jìn)電機(jī)應(yīng)用C語(yǔ)言程序的設(shè)計(jì)?
2021-10-20 06:51:19
步進(jìn)電機(jī)是什么?步進(jìn)電機(jī)有哪些參數(shù)?28BYJ步進(jìn)電機(jī)的配置流程是怎樣的?STM32的PWM控制步進(jìn)電機(jī)運(yùn)轉(zhuǎn)的實(shí)質(zhì)是什么?
2021-06-29 07:29:04
您好。我現(xiàn)在想用labview編寫(xiě)控制程序,控制步進(jìn)電機(jī)的運(yùn)轉(zhuǎn)(運(yùn)轉(zhuǎn)方向和運(yùn)轉(zhuǎn)角度以及轉(zhuǎn)動(dòng)速度)。值得一提的是,西門(mén)子PLC提供了脈沖串輸出(PTO)和脈寬調(diào)制(PWM)功能,脈沖的周期和個(gè)數(shù)均可
2014-05-08 22:30:17
A4988驅(qū)動(dòng)芯片有何功能?如何用串口調(diào)試助手發(fā)送數(shù)據(jù)讓步進(jìn)電機(jī)運(yùn)轉(zhuǎn)呢?
2021-12-20 07:00:50
本人硬件有NI USB 6341最多能4路計(jì)數(shù)器輸出(可以分別生成PWM)。一個(gè)4相5線步進(jìn)電機(jī)一個(gè)ULN2003電機(jī)驅(qū)動(dòng)器。我想用labview控制6341輸出PWM控制電機(jī)運(yùn)轉(zhuǎn),和調(diào)節(jié)方向。不要告訴我單片機(jī)怎么控制,我只要6341采集卡怎么控制
2019-12-23 13:53:09
小白求助,求獨(dú)立按鍵控制步進(jìn)電機(jī)運(yùn)轉(zhuǎn)C語(yǔ)言程序
2021-10-27 06:02:09
怎樣采用STM32F103驅(qū)動(dòng)ULN2003去控制28BYJ-48步進(jìn)電機(jī)運(yùn)轉(zhuǎn)呢?步進(jìn)電機(jī)程序該如何去改進(jìn)呢?
2021-12-20 06:45:18
功能。不過(guò)還有一個(gè)問(wèn)題就是速度還不能滿足我的項(xiàng)目需求,想調(diào)節(jié)步進(jìn)電機(jī)的速度指數(shù)曲線的數(shù)組但是不懂怎么生成?還望有做過(guò)的大神不吝賜教,謝謝!
2014-12-30 15:53:46
在步進(jìn)電機(jī)的電流PI調(diào)節(jié)時(shí),步進(jìn)調(diào)節(jié)是一步調(diào)節(jié)到位還是一個(gè)漸進(jìn)的過(guò)程?比如說(shuō)步進(jìn)電機(jī)的相位調(diào)節(jié),步進(jìn)電機(jī)的距角是1.5度,那他從4.5度調(diào)到6度的過(guò)程中,他是從4.5度直接到6度,還是說(shuō)從4.5-4.6-4.7-4.8.......6這樣子調(diào)過(guò)來(lái)的呢?初學(xué)者...........
2016-01-11 17:29:19
拍數(shù)及時(shí)序5.步進(jìn)電機(jī)系統(tǒng)的三個(gè)部分:控制器(單片機(jī))、驅(qū)動(dòng)器(芯片)、步進(jìn)電機(jī)。6.反轉(zhuǎn),把賦值順序反過(guò)來(lái)即可。...
2021-07-08 08:12:23
直流電機(jī)的速度調(diào)節(jié)原理是什么?步進(jìn)電機(jī)的原理是什么?
2021-10-22 07:45:17
請(qǐng)教大佬:電機(jī)運(yùn)轉(zhuǎn)沒(méi)聲音,但是靜止?fàn)顟B(tài)就有斯斯聲,時(shí)不時(shí)還有尖嘯聲,是什么原因呢?2相四線步進(jìn)電機(jī),A4988驅(qū)動(dòng)器一開(kāi)始覺(jué)得電流給大了,然后調(diào)節(jié)電位器使電流變小,發(fā)現(xiàn)還是有聲音。但是電機(jī)能正常運(yùn)轉(zhuǎn),有一點(diǎn)點(diǎn)熱,不燙手
2019-12-11 14:54:09
我想用atmega48,如何用AVR實(shí)現(xiàn)以下要求?設(shè)計(jì)一個(gè)步進(jìn)電機(jī)控制器。具體要求如下:1、基本要求1) 自制穩(wěn)壓電源。2) 控制器能夠驅(qū)動(dòng)步進(jìn)電機(jī)以三相三拍方式(步距3°)正向運(yùn)轉(zhuǎn)。3) 步進(jìn)電機(jī)
2013-05-24 15:15:25
針對(duì)工業(yè)界電機(jī)平穩(wěn)高速運(yùn)轉(zhuǎn)的需要,設(shè)計(jì)了兩相步進(jìn)電機(jī)高速細(xì)分驅(qū)動(dòng)模塊。模塊采用256步進(jìn)細(xì)分實(shí)現(xiàn)步進(jìn)電機(jī)的平穩(wěn)工作,采用指令周期短的MC56F8323,壓縮步進(jìn)處理指令數(shù),盡
2010-12-08 17:09:43 80
80 步進(jìn)電機(jī)的應(yīng)用
(一)步進(jìn)電機(jī)的選擇步進(jìn)電機(jī)有步距角(涉及到相數(shù)
2010-01-09 15:11:264026 步進(jìn)電機(jī)是一種專門(mén)用于位置和速度精確控制的特種電機(jī)。步進(jìn)電機(jī)的最大特點(diǎn)是其“數(shù)字性”,對(duì)于控制器發(fā)過(guò)來(lái)的每一個(gè)脈沖信號(hào),步進(jìn)電機(jī)在其驅(qū)動(dòng)器的推動(dòng)下運(yùn)轉(zhuǎn)一個(gè)固定
2010-06-03 09:46:262583 
步進(jìn)電機(jī)及驅(qū)動(dòng)器原理知識(shí)【知識(shí)講解】讓你更好的了解步進(jìn)電機(jī)驅(qū)動(dòng)器
2015-11-24 10:50:570 中興通訊已于今年7月收購(gòu)珠海廣通客車 70 % 的股份,實(shí)際控股了這家客車公司。中興智能汽車有限公司也因此順勢(shì)成立,旨在圍繞新能源汽車進(jìn)行研發(fā)、涉及、生產(chǎn)制造,以及車聯(lián)網(wǎng)應(yīng)用、大數(shù)據(jù)、自動(dòng)駕駛等研發(fā)與建設(shè)運(yùn)營(yíng)。
2016-12-30 09:30:11349 隨著電力電子技術(shù)的飛速發(fā)展,變頻調(diào)速的性能指標(biāo)完全可以達(dá)到甚至超過(guò)直流電機(jī)調(diào)速系統(tǒng)。通過(guò)調(diào)節(jié)輸入驅(qū)動(dòng)器的脈沖頻率以及驅(qū)動(dòng)器的細(xì)分參數(shù)來(lái)達(dá)到調(diào)節(jié)步進(jìn)電機(jī)轉(zhuǎn)速的作用,其實(shí)就是控制單位時(shí)間內(nèi)步進(jìn)電機(jī)的步數(shù)。
2018-02-07 15:51:3735647 如何在靠調(diào)節(jié)電流實(shí)現(xiàn)對(duì)微步進(jìn)電機(jī)的調(diào)整
2018-08-17 02:07:004242 對(duì)步進(jìn)電機(jī)的控制是經(jīng)濟(jì)型數(shù)控系統(tǒng)開(kāi)發(fā)時(shí)的一項(xiàng)重要內(nèi)容,其中對(duì)步進(jìn)電機(jī)運(yùn)動(dòng)過(guò)程中的升 降速控制是重點(diǎn)。步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開(kāi)環(huán)控制元步進(jìn)電機(jī)件。
2018-10-26 09:23:0018048 可以達(dá)到準(zhǔn)確定位的目的,同時(shí)還可以通過(guò)控制脈沖頻率用來(lái)控制電機(jī)轉(zhuǎn)動(dòng)的速度和加速度,從而可以達(dá)到調(diào)節(jié)轉(zhuǎn)動(dòng)速度的目的。步進(jìn)電機(jī)可以將電脈沖信號(hào)轉(zhuǎn)變成為角位移或者是線位移的開(kāi)環(huán)控制元步進(jìn)電機(jī)件,一般在非超載
2018-12-13 16:50:243340 步進(jìn)電機(jī)控制器是一種能夠發(fā)出平均脈沖信號(hào)的電子產(chǎn)品,它發(fā)出的信號(hào)進(jìn)入步進(jìn)電機(jī)驅(qū)動(dòng)器后,會(huì)由驅(qū)動(dòng)器轉(zhuǎn)換成步進(jìn)電機(jī)所需要的強(qiáng)電流信號(hào),帶動(dòng)步進(jìn)電機(jī)運(yùn)轉(zhuǎn)。
2019-10-01 15:10:005488 
步進(jìn)電機(jī)控制器是一種能夠發(fā)出均勻脈沖信號(hào)的電子產(chǎn)品,它發(fā)出的信號(hào)進(jìn)入步進(jìn)電機(jī)驅(qū)動(dòng)器后,會(huì)由驅(qū)動(dòng)器轉(zhuǎn)換成步進(jìn)電機(jī)所需要的強(qiáng)電流信號(hào),帶動(dòng)步進(jìn)電機(jī)運(yùn)轉(zhuǎn)。步進(jìn)電機(jī)控制器能夠準(zhǔn)確的控制步進(jìn)電機(jī)轉(zhuǎn)過(guò)每一個(gè)角度。
2019-10-01 08:58:0015865 步進(jìn)電機(jī)控制器:它是一種能夠發(fā)出均勻脈沖信號(hào)的電子產(chǎn)品,它發(fā)出的信號(hào)進(jìn)入步進(jìn)電機(jī)驅(qū)動(dòng)器后,會(huì)由驅(qū)動(dòng)器轉(zhuǎn)換成步進(jìn)電機(jī)所需要的強(qiáng)電流信號(hào),帶動(dòng)步進(jìn)電機(jī)運(yùn)轉(zhuǎn)。步進(jìn)電機(jī)控制器能夠準(zhǔn)確的控制步進(jìn)電機(jī)轉(zhuǎn)過(guò)每一個(gè)角度。
2019-12-10 08:49:067859 多相步進(jìn)電機(jī)的優(yōu)點(diǎn)是能高速響應(yīng)。步進(jìn)電機(jī)為同步電機(jī),繞組電流頻率與轉(zhuǎn)子速度成正比例,若電機(jī)高速運(yùn)轉(zhuǎn),則繞組電流角頻率ω增加,使繞組電感L產(chǎn)生的電抗ωL加大,從而降低電流,致使轉(zhuǎn)矩下降。
2020-03-10 09:42:281517 我們?nèi)粘I町?dāng)中經(jīng)常發(fā)現(xiàn)步進(jìn)電機(jī),例如空調(diào)掃風(fēng)、打印機(jī)應(yīng)用、機(jī)器人行走等,它的驅(qū)動(dòng)必須有驅(qū)動(dòng)信號(hào)才可以運(yùn)轉(zhuǎn),而且增驅(qū)動(dòng)信號(hào)是脈沖信號(hào),步進(jìn),顧名思義就是要一步一步的走,如果沒(méi)有脈沖,步進(jìn)電機(jī)就會(huì)不運(yùn)轉(zhuǎn),它運(yùn)轉(zhuǎn)的速度與脈沖的頻率成正比關(guān)系。
2020-05-01 16:51:002321 步進(jìn)電機(jī)驅(qū)動(dòng)器都支持細(xì)分功能,即實(shí)現(xiàn)很小的步進(jìn)角,控制更精確。但是步進(jìn)電機(jī)不適合使用在長(zhǎng)時(shí)間同方向運(yùn)轉(zhuǎn)的情況下,容易燒壞產(chǎn)品。即,通常在短距離頻繁動(dòng)作時(shí)使用較佳。 步進(jìn)電機(jī)溫度過(guò)高會(huì)使電機(jī)的磁性材料
2020-05-24 10:09:59833 1.有刷電機(jī)驅(qū)動(dòng)電路有刷電機(jī)是電機(jī)里面最簡(jiǎn)單,也是歷史最悠久的一種,到現(xiàn)在仍然廣泛應(yīng)用于各個(gè)領(lǐng)域。他的控制很簡(jiǎn)單,在電機(jī)的兩個(gè)電極加正向電壓,則正向旋轉(zhuǎn),如果加反向電壓,則旋轉(zhuǎn)方向也反過(guò)來(lái)。電機(jī)的轉(zhuǎn)速可以通過(guò)控制加在電極上的電壓來(lái)調(diào)節(jié)
2020-12-24 13:39:52732 的包裝機(jī)上,規(guī)定包袋塑料膜精確定位,無(wú)論間歇供應(yīng)或連續(xù)供應(yīng),都能用步進(jìn)電機(jī)來(lái)完成。 1.用于間歇式包裝機(jī) 間歇式包裝機(jī)用步進(jìn)電機(jī)供膜,可提高穩(wěn)定性。前代包裝膜供送物多選用曲柄連桿組織間歇性拉帶方法,構(gòu)造繁瑣,調(diào)節(jié)
2021-07-11 15:21:45346 來(lái)控制繞組,按正確順序正反通電,從而實(shí)現(xiàn)電機(jī)的運(yùn)轉(zhuǎn)。 ? ? ? ?以兩相1.8度步進(jìn)電機(jī)為例,主要有4線雙極性和6線單極性兩種方法: ? 4線雙極性電機(jī) ? ? ? ?當(dāng)繞組的通電方向按順序ac-bd-ca-db 四個(gè)狀態(tài)周而復(fù)始進(jìn)行變化時(shí),每變化一
2021-08-11 18:04:0031224 ,所謂步進(jìn)電機(jī),就是根據(jù)控制信號(hào)運(yùn)動(dòng),一個(gè)脈沖信號(hào)首先說(shuō)到步進(jìn)電機(jī)轉(zhuǎn)速,那就必須得說(shuō)到步進(jìn)電機(jī)轉(zhuǎn)動(dòng)的一些原理。通過(guò)調(diào)節(jié)輸入驅(qū)動(dòng)器的脈沖頻率以及驅(qū)動(dòng)器的細(xì)分參數(shù)來(lái)達(dá)到調(diào)節(jié)步進(jìn)電機(jī)轉(zhuǎn)速,實(shí)際是控制單位時(shí)間內(nèi)步進(jìn)電機(jī)
2021-09-22 15:46:524200 拍數(shù)及時(shí)序5.步進(jìn)電機(jī)系統(tǒng)的三個(gè)部分:控制器(單片機(jī))、驅(qū)動(dòng)器(芯片)、步進(jìn)電機(jī)。6.反轉(zhuǎn),把賦值順序反過(guò)來(lái)即可。...
2021-11-18 12:21:057 伺服電機(jī)和步進(jìn)電機(jī)有什么不同?伺服電機(jī)是在伺服系統(tǒng)中控制機(jī)械元件運(yùn)轉(zhuǎn)的發(fā)動(dòng)機(jī)。步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)換成相應(yīng)角位移或線位移的電動(dòng)機(jī)。兩種設(shè)備在工業(yè)自動(dòng)化控制中有著非常廣泛的應(yīng)用。
2022-01-04 19:43:2927180 步進(jìn)電機(jī)是什么?步進(jìn)電機(jī)不轉(zhuǎn)怎么辦?小編教你解決步進(jìn)電機(jī)不轉(zhuǎn)問(wèn)題 日常生活中電機(jī)大家肯定都聽(tīng)說(shuō)過(guò),但是步進(jìn)電機(jī)或許就會(huì)有些陌生了,步進(jìn)電機(jī)在一些領(lǐng)域起著相當(dāng)大的作用,但是步進(jìn)電機(jī)不轉(zhuǎn)的情況時(shí)有出現(xiàn)
2022-04-14 10:51:3515672 步進(jìn)電機(jī)的步距角是指電機(jī)在每一步運(yùn)動(dòng)時(shí)所轉(zhuǎn)動(dòng)的角度,一般用度數(shù)(°)來(lái)表示。常見(jiàn)的步進(jìn)電機(jī)的步距角有1.8度、0.9度、0.45度、0.36度等。其中1.8度是最常見(jiàn)的步進(jìn)電機(jī)步距角,也是最為普遍的一種。
2023-03-03 11:00:275753 步進(jìn)電機(jī)和伺服電機(jī)都是常見(jiàn)的電動(dòng)機(jī)種類,它們有著不同的工作原理和應(yīng)用場(chǎng)合。
步進(jìn)電機(jī)是一種定角度運(yùn)轉(zhuǎn)的電動(dòng)機(jī),它的轉(zhuǎn)動(dòng)是根據(jù)外部提供的脈沖信號(hào)來(lái)實(shí)現(xiàn)的。步進(jìn)電機(jī)具有精度高、控制簡(jiǎn)單、適合低速運(yùn)動(dòng)等特點(diǎn),適用于需要高精度定位控制的場(chǎng)合,如印刷機(jī)、繪圖儀、數(shù)碼相機(jī)等。
2023-03-07 17:59:044525 步進(jìn)電機(jī)是一種定角度運(yùn)轉(zhuǎn)的電動(dòng)機(jī),其作用主要是用于控制精度要求較高的定位、旋轉(zhuǎn)、平移等機(jī)械系統(tǒng)的運(yùn)動(dòng)。步進(jìn)電機(jī)通常與控制器一起使用,通過(guò)向電機(jī)提供精確的脈沖信號(hào)來(lái)控制其旋轉(zhuǎn)角度和速度。
2023-03-08 14:14:203444 一般情況下,伺服電機(jī)的精度要高于步進(jìn)電機(jī)。伺服電機(jī)可以根據(jù)反饋信號(hào)實(shí)時(shí)調(diào)整輸出的電流和位置,能夠更加精準(zhǔn)地控制位置和速度。而步進(jìn)電機(jī)只能按照預(yù)設(shè)的步數(shù)和速度運(yùn)轉(zhuǎn),難以在高速和負(fù)載變化的情況下保持穩(wěn)定的精度。然而,在低速、低負(fù)載、短行程等應(yīng)用場(chǎng)景下,步進(jìn)電機(jī)也可以達(dá)到較高的精度。
2023-03-09 10:45:586264 L298N芯片可以驅(qū)動(dòng)兩個(gè)二相電機(jī),也可以驅(qū)動(dòng)一個(gè)四相電機(jī),輸出電壓最高可達(dá)50V,可以直接通過(guò)來(lái)調(diào)節(jié)電源輸出電壓;可以直接用單片機(jī)的IO口提供信號(hào);而且電路簡(jiǎn)單,使用比較
方便。
步進(jìn)電機(jī)就是
2023-03-16 09:28:481 主要功能
1.使用ad轉(zhuǎn)換模塊,調(diào)節(jié)滑動(dòng)變阻器輸出實(shí)際電壓值顯示在數(shù)碼管上。在步進(jìn)電機(jī)正轉(zhuǎn)時(shí),根據(jù)輸出的電壓值調(diào)節(jié)步進(jìn)電機(jī)轉(zhuǎn)速。
2.使用按鍵S1 S2 S3 S4控制步進(jìn)電機(jī),其中S1控制步進(jìn)
2023-03-23 14:13:041 設(shè)計(jì)一個(gè)開(kāi)環(huán)步進(jìn)電機(jī)控制系統(tǒng)。使得步進(jìn)電機(jī)能夠正常運(yùn)轉(zhuǎn)。并能實(shí)現(xiàn)啟停、正反轉(zhuǎn)、調(diào)速控制。以及顯示速度。
設(shè)計(jì)要求如下: ①硬件測(cè)試通過(guò)。接線完成。三個(gè)芯片分別測(cè)試通過(guò)。步進(jìn)電機(jī)能夠正常運(yùn)轉(zhuǎn)
2023-03-23 10:56:581 步進(jìn)電機(jī)控制器是一種能夠發(fā)出均勻脈沖信號(hào)的電子產(chǎn)品,它發(fā)出的信號(hào)進(jìn)入步進(jìn)電機(jī)驅(qū)動(dòng)器后,會(huì)由驅(qū)動(dòng)器轉(zhuǎn)換成步進(jìn)電機(jī)所
需要的強(qiáng)電流信號(hào),帶動(dòng)步進(jìn)電機(jī)運(yùn)轉(zhuǎn)。步進(jìn)電機(jī)控制器能夠準(zhǔn)確的控制步進(jìn)電機(jī)轉(zhuǎn)過(guò)每一個(gè)
2023-03-23 10:24:221 步進(jìn)電機(jī)控制器是一種能夠發(fā)出均勻脈沖信號(hào)的電子產(chǎn)品,它發(fā)出的信號(hào)進(jìn)入步進(jìn)電機(jī)驅(qū)動(dòng)器后,會(huì)由驅(qū)動(dòng)器轉(zhuǎn)換成步進(jìn)電機(jī)
所需要的強(qiáng)電流信號(hào),帶動(dòng)步進(jìn)電機(jī)運(yùn)轉(zhuǎn)。步進(jìn)電機(jī)控制器能夠準(zhǔn)確的控制步進(jìn)電機(jī)轉(zhuǎn)過(guò)每一個(gè)
2023-05-05 14:16:034 有刷電機(jī)是電機(jī)里面最簡(jiǎn)單,也是歷史最悠久的一種,到現(xiàn)在仍然廣泛應(yīng)用于各個(gè)領(lǐng)域。他的控制很簡(jiǎn)單,在電機(jī)的兩個(gè)電極加正向電壓,則正向旋轉(zhuǎn),如果加反向電壓,則旋轉(zhuǎn)方向也反過(guò)來(lái)。電機(jī)的
轉(zhuǎn)速可以通過(guò)控制
2023-05-06 09:24:432 這個(gè)得反過(guò)來(lái)從電機(jī)特點(diǎn)說(shuō)。電機(jī)可以簡(jiǎn)單劃分為直流電機(jī)和交流電機(jī),交流又分為同步電機(jī)和異步電機(jī)。
2023-05-25 09:43:57794 步進(jìn)電機(jī),就是根據(jù)控制信號(hào)運(yùn)動(dòng),一個(gè)脈沖信號(hào)首先說(shuō)到步進(jìn)電機(jī)轉(zhuǎn)速,那就必須得說(shuō)到步進(jìn)電機(jī)轉(zhuǎn)動(dòng)的一些原理。通過(guò)調(diào)節(jié)輸入驅(qū)動(dòng)器的脈沖頻率以及驅(qū)動(dòng)器的細(xì)分參數(shù)來(lái)達(dá)到調(diào)節(jié)步進(jìn)電機(jī)轉(zhuǎn)速,實(shí)際是控制單位時(shí)間內(nèi)
2023-06-12 17:20:182396 其實(shí)是這樣,主線圈的1(2)接副線圈的2(1),這樣就正傳,反過(guò)來(lái)。
2023-07-31 09:51:206537 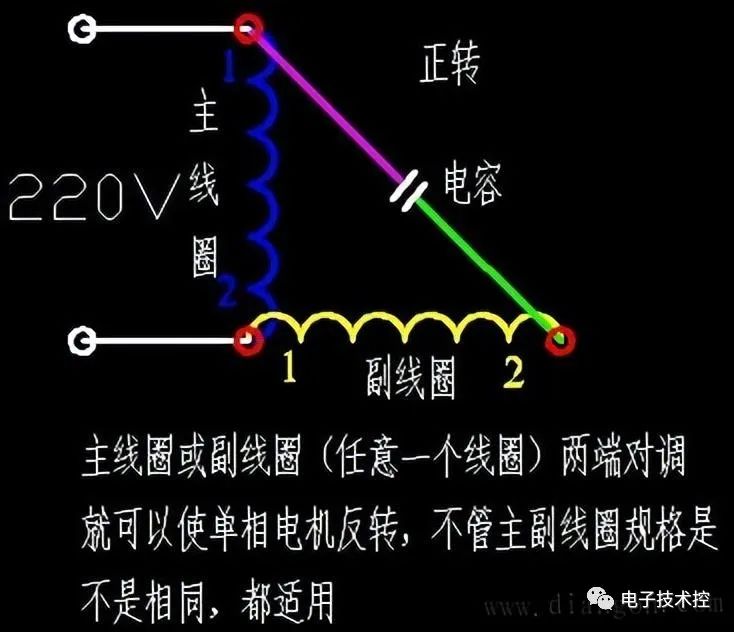
步進(jìn)電機(jī)是一種電動(dòng)機(jī)的類型,它以準(zhǔn)確的固定角度步進(jìn)方式運(yùn)轉(zhuǎn)。步進(jìn)電機(jī)內(nèi)部包含電磁鐵和旋轉(zhuǎn)式永磁轉(zhuǎn)子,通過(guò)電流的變化控制電磁鐵的磁場(chǎng)強(qiáng)度,從而產(chǎn)生扭矩,驅(qū)動(dòng)轉(zhuǎn)子旋轉(zhuǎn)。步進(jìn)電機(jī)通常用于需要準(zhǔn)確位置控制
2024-01-22 10:15:59209 步進(jìn)電機(jī)控制器是一種能夠發(fā)出均勻脈沖信號(hào)的電子產(chǎn)品,主要用于控制步進(jìn)電機(jī)的運(yùn)動(dòng)。它發(fā)出的信號(hào)進(jìn)入步進(jìn)電機(jī)驅(qū)動(dòng)器后,會(huì)由驅(qū)動(dòng)器轉(zhuǎn)換成步進(jìn)電機(jī)所需要的強(qiáng)電流信號(hào),帶動(dòng)步進(jìn)電機(jī)運(yùn)轉(zhuǎn)。
2024-02-07 17:57:00651 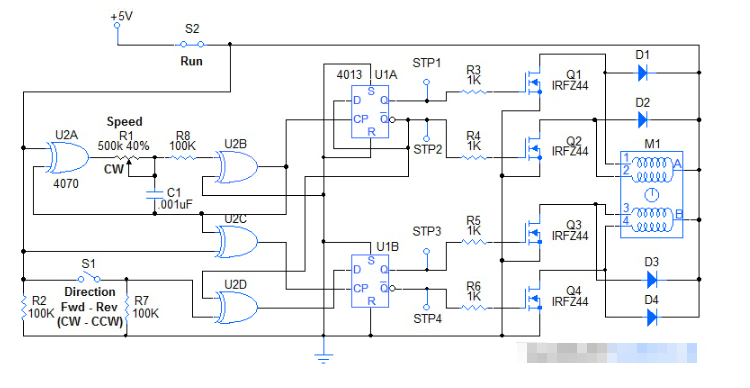
常見(jiàn)的問(wèn)題及維護(hù)方法,幫助讀者更好地使用步進(jìn)電機(jī)。 ? ? ? 一、步進(jìn)電機(jī)常見(jiàn)問(wèn)題 ? ? ? 1. 步進(jìn)電機(jī)運(yùn)轉(zhuǎn)不正常 ? ? ? 步進(jìn)電機(jī)運(yùn)轉(zhuǎn)不正常可能是由于驅(qū)動(dòng)器參數(shù)設(shè)置不當(dāng)、電機(jī)與驅(qū)動(dòng)器連接不良、電機(jī)本身故障等原因引起的。為了解
2024-03-17 08:36:1038 
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論