 電子發(fā)燒友App
電子發(fā)燒友App


摘要:本文介紹了同步器信號(hào)采集板在飛行參數(shù)記錄系統(tǒng)中的應(yīng)用,同步器信號(hào)采集板的采集原理及硬件電路設(shè)計(jì)方法。
飛行參數(shù)記錄系統(tǒng)俗稱“黑匣子”,是民用和軍用飛機(jī)普遍加裝的重要機(jī)載設(shè)備之一。飛行參數(shù)記錄系統(tǒng)采集的同步器信號(hào)參數(shù)主要是飛機(jī)的姿態(tài)角和航向角參數(shù),包括地平儀姿態(tài)陀螺的俯仰角、傾斜角和航向陀螺的航向角,這些都是飛行參數(shù)記錄系統(tǒng)中重要的飛機(jī)姿態(tài)參數(shù)對(duì)于保障飛行安全,提高飛行訓(xùn)練水平和機(jī)務(wù)維護(hù)質(zhì)量都具有十分重要的作用。
系統(tǒng)組成
某型機(jī)載飛行參數(shù)記錄系統(tǒng)由飛參控制器、飛參數(shù)據(jù)采集器、防護(hù)記錄器、電源4部分組成。其中飛參數(shù)據(jù)采集器采用了統(tǒng)一總線方式下的功能模塊設(shè)計(jì)技術(shù),按功能分為6個(gè)模塊:中央處理器板、模擬量采集板、開(kāi)關(guān)量采集板、頻率量采集板、同步器信號(hào)采集板、固態(tài)記錄卡。本文著重介紹同步器信號(hào)采集板的采集原理和實(shí)現(xiàn)過(guò)程。同步器信號(hào)采集板由同步器轉(zhuǎn)換模塊、數(shù)據(jù)鎖存電路、地址譯碼電路、控制電路等組成,完成3路同步器信號(hào)的采集。
同步器信號(hào)采集原理
航空地平儀用來(lái)測(cè)定飛機(jī)在空間相對(duì)于地平線的狀態(tài),輸出與俯仰角和傾斜角成比例的電信號(hào);航向系統(tǒng)用于測(cè)定飛機(jī)相對(duì)于地磁場(chǎng)的航向角,輸出與航向角成比例的電信號(hào)。飛機(jī)姿態(tài)和航向陀螺輸出的角度信號(hào)為三相交流同步器信號(hào)。三相交流同步器又稱自整角機(jī),分解器又稱旋轉(zhuǎn)變壓器,它們皆歸類于微特電機(jī)。在傳統(tǒng)的測(cè)角跟蹤系統(tǒng)與機(jī)電模擬解算系統(tǒng)中,它們都是重要的組成部件。在轉(zhuǎn)角與位移測(cè)量系統(tǒng)中,它們也是一種常用的角度傳感器。本設(shè)計(jì)選用的ZSZ/XSZ-02是一種超小型、模塊式、通用化的自整角機(jī)/旋轉(zhuǎn)變壓器—數(shù)字轉(zhuǎn)換器,采用二階伺服原理設(shè)計(jì),數(shù)據(jù)輸出具有三態(tài)鎖存功能,采用32線雙列直插金屬外殼封裝,體積小,重量輕,可靠性高。
輸入信號(hào)可以接收來(lái)自三線自整角機(jī)的角度激勵(lì)信號(hào)和參考電壓信號(hào),也可以接收來(lái)自四線旋轉(zhuǎn)變壓器的角度激勵(lì)信號(hào)和參考電壓信號(hào)。輸出角度信號(hào)經(jīng)過(guò)三態(tài)數(shù)據(jù)鎖存器鎖存、變成與TTL電平兼容的并行二進(jìn)制碼數(shù)字量信號(hào)。三態(tài)輸出能使多個(gè)轉(zhuǎn)換器直接掛在數(shù)據(jù)總線上,而且在使用禁止信號(hào)/INH時(shí)不斷開(kāi)轉(zhuǎn)換器內(nèi)部回路。該系列轉(zhuǎn)換器和美國(guó)AD公司生產(chǎn)的SDC/RDC1740系列兼容。
為了將模擬信號(hào)變換成表示角度的數(shù)字信號(hào),以前往往采用模擬開(kāi)關(guān)、采樣/保持、A/D轉(zhuǎn)換器等組成轉(zhuǎn)換電路來(lái)完成。近十多年來(lái)研制出將自整角機(jī)和旋轉(zhuǎn)變壓器輸出的交流信號(hào)直接變換成數(shù)字信號(hào)的器件,即自整角機(jī)/數(shù)字轉(zhuǎn)換器(SDC)和旋轉(zhuǎn)變壓器/數(shù)字轉(zhuǎn)換器(RDC)器件。
自整角機(jī)/旋轉(zhuǎn)變壓器—數(shù)字轉(zhuǎn)換器模塊結(jié)構(gòu)框圖如圖1所示。
自整角機(jī)輸出的三線電壓或旋轉(zhuǎn)變壓器輸出的四線電壓分別對(duì)應(yīng)接至轉(zhuǎn)換器SDC或RDC的輸入端S1、S2、S3端或S1、S2、S3、S4端。
如果器件是自整角機(jī)一數(shù)字轉(zhuǎn)換器,則自整角機(jī)三線輸出應(yīng)連接到轉(zhuǎn)換器上的S1、S2和S3端,那么微型Scott變壓器將這些信號(hào)轉(zhuǎn)換成正弦、余弦形式。即:
V1=K1U0sinwtsinq
V2=K1U0SinwtCosq
這里q是自整角機(jī)軸角。
如果器件是旋轉(zhuǎn)變壓器一數(shù)字轉(zhuǎn)換器,則旋轉(zhuǎn)變壓器四線輸出應(yīng)連接到轉(zhuǎn)換器上的S1、S2、S3、和S4端,那么此時(shí)的微型變壓器只起隔離和變壓作用。
V1=K1U0sinqcoswt
V2=K1U0cosqsinwt
為便于理解轉(zhuǎn)換過(guò)程,假定可逆計(jì)數(shù)器當(dāng)前字狀態(tài)為f,那么,V1乘以Cosf、V2乘以Sinf得到:
K1U0 sinqcosfsinwt
K1U0 cosqsinfsinwt
這些信號(hào)經(jīng)誤差放大器后得到:K1U0(sinqcosf-cosqsinf)sinwt
經(jīng)三角函數(shù)變換后得到:K1U0sin(q-f) sinwt
由相敏解調(diào)器、積分器、壓控振蕩器(VCO)和可逆計(jì)數(shù)器等組成的閉環(huán)系統(tǒng)使Sin(q-f)趨近于零,即q=f。當(dāng)這個(gè)過(guò)程完成時(shí),可逆計(jì)算器內(nèi)的代碼(f)就等于轉(zhuǎn)換器的轉(zhuǎn)換結(jié)果,轉(zhuǎn)換器輸出的二進(jìn)制數(shù)字值(φ)代表了自整角機(jī)或旋轉(zhuǎn)變壓器輸出的軸角θ,該數(shù)字值直接或通過(guò)三態(tài)鎖存器送至計(jì)算機(jī)用于顯示。假定禁止信號(hào)“/INH”是邏輯高電平,那么,可逆計(jì)數(shù)器被更新以后,其數(shù)字量φ將被選通進(jìn)入三態(tài)鎖存器,如果使能信號(hào)“/ENM”和“/ENL”是邏輯低電平,那么φ將出現(xiàn)在輸出端上。
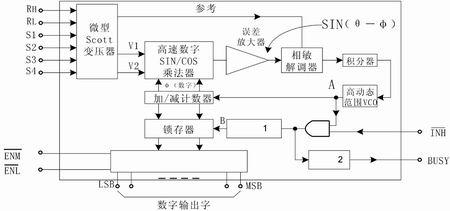
圖1 自整角機(jī)/旋轉(zhuǎn)變壓器—數(shù)字轉(zhuǎn)換器模塊原理框圖
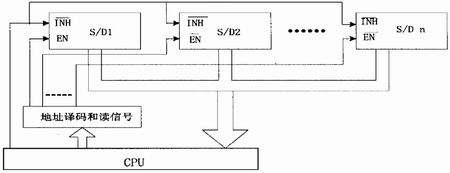
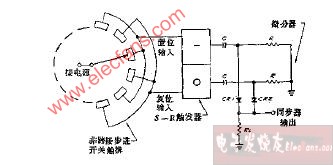
圖2 多路同步器模塊連接線路框圖
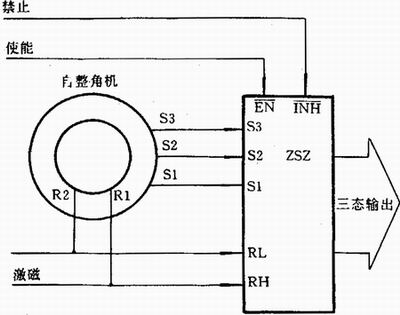
圖3 同步器信號(hào)發(fā)送與接收模塊連線圖
同步器信號(hào)采集板電路設(shè)計(jì)
ZSZ/XSZ-02同步器模塊控制信號(hào)有三個(gè):/INH、/EN、BYSEL。計(jì)算機(jī)與外部設(shè)備交換數(shù)據(jù)時(shí),要對(duì)外設(shè)發(fā)送設(shè)備選擇信號(hào)/CS和讀信號(hào)/RD,當(dāng)數(shù)據(jù)總線為8位寬度時(shí),計(jì)算機(jī)還需發(fā)送字節(jié)選擇信號(hào)BYSEL。轉(zhuǎn)換模塊與計(jì)算機(jī)之間交換數(shù)據(jù)的能力與一般外部設(shè)備一樣具有兼容性。/INH引腳與計(jì)算機(jī)的/CS信號(hào)相連,/EN引腳與/RD信號(hào)相連,BYSEL引腳與計(jì)算機(jī)的字節(jié)選擇信號(hào)相連。當(dāng)使用8位寬度的數(shù)據(jù)總線時(shí),只需ZSZ(XSZ)的高8位依次連接到8位數(shù)據(jù)總線上。在字輸出時(shí),轉(zhuǎn)換器的BYSEL引腳應(yīng)接高電平(或懸空),并且模塊全部數(shù)據(jù)輸出線與計(jì)算機(jī)數(shù)據(jù)總線一一相連。
當(dāng)進(jìn)行數(shù)據(jù)傳輸時(shí),計(jì)算機(jī)可向/INH端發(fā)一個(gè)邏輯低電平,從而阻止鎖存器的刷新,當(dāng)/INH端被置于低電平并延遲600ns后,便可讀取數(shù)據(jù)。最后一個(gè)地址結(jié)束時(shí)須把/INH恢復(fù)成高電平。這里把/EN作為地址信號(hào)。線路框圖見(jiàn)圖2。也可以把每個(gè)轉(zhuǎn)換器的/INH與計(jì)算機(jī)地址信號(hào)相連, /EN與計(jì)算機(jī)讀信號(hào)/RD相連,并相應(yīng)將時(shí)序進(jìn)行調(diào)整。
自整角機(jī)激磁引線端Z1、Z2及信號(hào)輸出端D1、D2、D3與ZSZ模塊的參考引腳RH、RL及輸入信號(hào)引腳S1、S2、S3之間按圖3的對(duì)應(yīng)關(guān)系接線,這種接法與電氣零位調(diào)零的規(guī)則(GB13138-91)自整角機(jī)規(guī)范、(GB10241-88)旋轉(zhuǎn)變壓器規(guī)范相一致。若兩個(gè)參考信號(hào)引腳間接反或三個(gè)信號(hào)引腳間接線錯(cuò)了,不會(huì)引起轉(zhuǎn)換器的損壞,但會(huì)引起零位和編碼方向調(diào)整的麻煩。
同步器信號(hào)采集板完成三路同步器信號(hào)的采集,由同步器轉(zhuǎn)換模塊、數(shù)據(jù)鎖存電路、地址譯碼電路、控制電路等組成。同步器信號(hào)采集板電路組成方框圖見(jiàn)圖4。
同步器轉(zhuǎn)換模塊把地平儀、航向陀螺輸出的三相正余弦同步器角度信號(hào)變成單片機(jī)能接收的數(shù)字量信號(hào),同步器轉(zhuǎn)換模塊是一種采用跟蹤轉(zhuǎn)換技術(shù)和模塊化結(jié)構(gòu)的自整角機(jī)—數(shù)字轉(zhuǎn)換器,它應(yīng)用二階伺服回路,輸出是與TTL電平兼容的12位并行自然二進(jìn)制碼,完成角度的模/數(shù)轉(zhuǎn)換,且在數(shù)字輸出端包含三態(tài)鎖存器。
地址譯碼電路,實(shí)現(xiàn)三路同步器轉(zhuǎn)換模塊的地址譯碼,分時(shí)讀取每一路同步器模塊的角度信號(hào)。控制電路由邏輯門(mén)電路組成,實(shí)現(xiàn)三路同步器轉(zhuǎn)換模塊的數(shù)據(jù)分時(shí)讀取使能控制。數(shù)據(jù)鎖存電路由三態(tài)數(shù)據(jù)鎖存器組成,鎖存同步器轉(zhuǎn)換模塊的高4位數(shù)據(jù),實(shí)現(xiàn)12位同步器數(shù)據(jù)的分時(shí)讀取。飛參數(shù)據(jù)采集器通過(guò)系統(tǒng)8位數(shù)據(jù)總線,分兩次讀取轉(zhuǎn)換數(shù)據(jù),先讀取12位同步器轉(zhuǎn)換模塊的低8位數(shù)據(jù),再讀取同步器轉(zhuǎn)換模塊的高4位數(shù)據(jù)。通過(guò)同步器數(shù)據(jù)采集板完成了飛行參數(shù)記錄系統(tǒng)同步器信號(hào)的數(shù)據(jù)采集。

圖4 同步器信號(hào)采集板電路組成方框圖
結(jié)語(yǔ)
同步器采集板在原理設(shè)計(jì)階段,解決了12位同步器數(shù)據(jù)的同步采集存儲(chǔ)、三路同步器信號(hào)的分時(shí)采集、同步器數(shù)據(jù)實(shí)時(shí)性隨動(dòng)變化、同步器采集板電源去偶濾波等技術(shù)難點(diǎn)。同時(shí)使用非常方便,只需將自整角機(jī)或旋轉(zhuǎn)變壓器的引線和轉(zhuǎn)換器的引腳一一對(duì)應(yīng)相連即可。為減少干擾,在同步器供電模塊電源的+5V、+15V和-15V到公共地(GND)之間并聯(lián)一個(gè)0.1mF和6.8mF的濾波電容。
同步器信號(hào)采集板作為飛行參數(shù)記錄系統(tǒng)的一部分,已批量裝備部隊(duì)使用。同時(shí)作為試飛測(cè)試系統(tǒng)中機(jī)載數(shù)據(jù)采集器的一部分,已在多個(gè)系統(tǒng)和項(xiàng)目中得到廣泛應(yīng)用。通過(guò)用戶的使用證明,系統(tǒng)工作穩(wěn)定可靠。
- 飛行參數(shù)(6429)


聲明:本文內(nèi)容及配圖由入駐作者撰寫(xiě)或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問(wèn)題,請(qǐng)聯(lián)系本站處理。 舉報(bào)投訴
相關(guān)推薦
同步器原理電路
 6185
6185
源同步信號(hào)跨時(shí)鐘域采集的兩種方法
4167
基于FPGA的通用位同步器設(shè)計(jì)方案
5134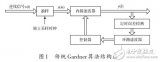
基于四路同步水聲信號(hào)記錄儀設(shè)計(jì)方案
2584
飛行控制計(jì)算機(jī)采集處理系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)
飛行器動(dòng)力學(xué)參數(shù)在線辨識(shí)EKF算法實(shí)驗(yàn)流程
AD9371實(shí)例應(yīng)用之多通道寬帶同步采集系統(tǒng)
DAY-1000數(shù)字音頻同步器
【AT91SAM9261申請(qǐng)】四旋翼飛行器的農(nóng)田檢測(cè)系統(tǒng)
【CANNON申請(qǐng)】飛行器數(shù)據(jù)記錄系統(tǒng)
【FPGA參賽作品】生理電信號(hào)同步多通道數(shù)據(jù)采集系統(tǒng)的設(shè)...
一種基于FPGA的振動(dòng)信號(hào)采集處理系統(tǒng)設(shè)計(jì)介紹
一種對(duì)變頻器的關(guān)鍵電量進(jìn)行監(jiān)測(cè)和記錄的系統(tǒng)的設(shè)計(jì)
不同信號(hào)類型數(shù)據(jù)同步采集
兩級(jí)DFF同步器跨時(shí)鐘域處理簡(jiǎn)析
為什么SRL16不適合成為同步器?
傳感器數(shù)據(jù)采集/總線數(shù)據(jù)采集記錄知識(shí)分享
全方面的了解超寬帶信號(hào)高速采集記錄回放系統(tǒng)
關(guān)于FPGA設(shè)計(jì)的同步信號(hào)和亞穩(wěn)態(tài)的分析
關(guān)于異步fifo里面讀寫(xiě)指針同步器的問(wèn)題,求教
四旋翼自主飛行器探測(cè)跟蹤系統(tǒng)
基于FPGA的飛機(jī)電源參數(shù)測(cè)試設(shè)備設(shè)計(jì)
多通道信號(hào)采集記錄 多通道采集存儲(chǔ) 多通道記錄存儲(chǔ)介紹
如何同步采集信號(hào)及邊沿計(jì)數(shù)方面問(wèn)題
如何修改KM鍵鼠同步器的VID、PID?
如何在MAC系統(tǒng),運(yùn)用Labview控制不同聲卡,實(shí)現(xiàn)多路聲音信號(hào)同步采集?
定位飛行過(guò)程中飛機(jī)的噪聲源的測(cè)量系統(tǒng)
實(shí)現(xiàn)傳感器信號(hào)同步,少不了這些步驟
怎么設(shè)計(jì)一個(gè)簡(jiǎn)易的四軸飛行器系統(tǒng)
感應(yīng)同步器介紹
游戲同步器功能介紹作用講解使用方法
矢量信號(hào)分析儀的計(jì)量校準(zhǔn)
請(qǐng)問(wèn)使用兩片AD2S1210能否實(shí)現(xiàn)雙通道感應(yīng)同步器采樣?
請(qǐng)問(wèn)怎樣去設(shè)計(jì)一種時(shí)間同步器?
基于ARM-Linux平臺(tái)的機(jī)載數(shù)據(jù)采集記錄裝置設(shè)計(jì)
 23
23用于感應(yīng)同步器的數(shù)字變換芯片AD2S90
43嵌人式飛行參數(shù)傳感系統(tǒng)的設(shè)計(jì)與可行性驗(yàn)證
21心電信號(hào)采集記錄系統(tǒng)的設(shè)計(jì)
73基于AD2S83和DSP的感應(yīng)同步器測(cè)角系統(tǒng)
36用于感應(yīng)同步器的數(shù)字變換芯片AD2S90
29Protel2004環(huán)境下同步器設(shè)計(jì)電路印制板的研究
0基于FPGA的數(shù)字復(fù)接系統(tǒng)幀同步器設(shè)計(jì)
31什么是感應(yīng)同步器?感應(yīng)同步器的結(jié)構(gòu)特點(diǎn)
3005
感應(yīng)同步器的工作原理,感應(yīng)同步器的應(yīng)用
3299
基于模糊控制的遲早門(mén)同步器及其FPGA實(shí)現(xiàn)
712
感應(yīng)同步器,什么是感應(yīng)同步器
2415
感應(yīng)同步器的基本結(jié)構(gòu)
4269
感應(yīng)同步器的工作原理
8281
感應(yīng)同步器的信號(hào)處理
4218
感應(yīng)同步器的應(yīng)用
3323

基于C8051F350的無(wú)線同步數(shù)據(jù)采集系統(tǒng)的實(shí)現(xiàn)
1675
什么是無(wú)同步器機(jī)械變速器智能換檔系統(tǒng)
1708
基于AD9548的數(shù)據(jù)同步采集系統(tǒng)設(shè)計(jì)
65一種固態(tài)飛行參數(shù)記錄儀的研制
21
數(shù)控技術(shù)加工:3.4.4 感應(yīng)同步器#數(shù)控
某探測(cè)器測(cè)試與信號(hào)處理系統(tǒng)的PCM信息采集
1321
一種可變位速率的位同步器的設(shè)計(jì)與仿真
28基于FPGA的同步器信號(hào)采集技術(shù)研究
0飛行控制計(jì)算機(jī)采集處理系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)
10便攜式振動(dòng)信號(hào)采集系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)
17
基于PLC的變速器同步器測(cè)試系統(tǒng)解析
0鎖環(huán)式慣性同步器結(jié)構(gòu)與工作過(guò)程
57584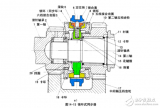
基于峰值采樣圓感應(yīng)同步器測(cè)角系統(tǒng)研究
0關(guān)于MSP430的圓感應(yīng)同步器方位測(cè)角系統(tǒng)
5同步器的作用
9728感應(yīng)同步器的工作原理
27739感應(yīng)同步器特點(diǎn)
7238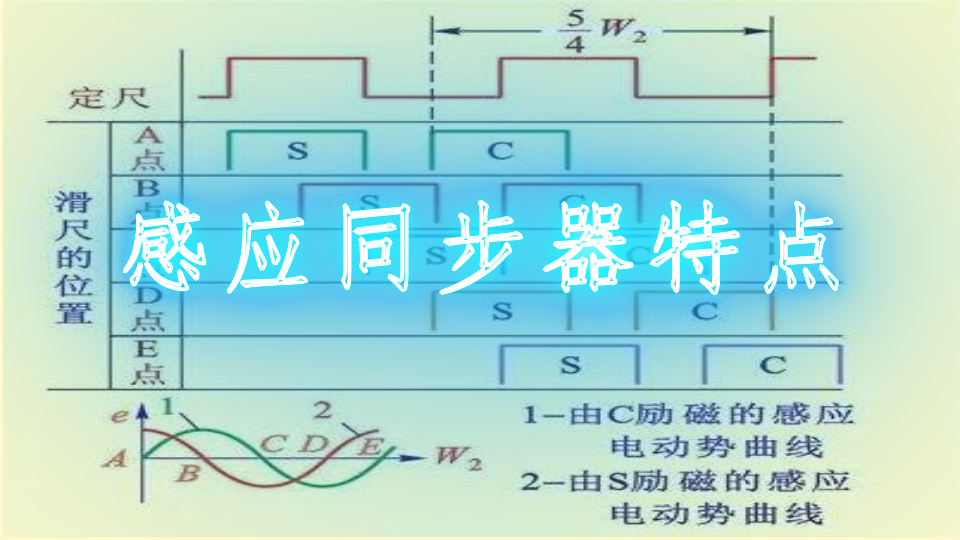
高速數(shù)據(jù)采集記錄系統(tǒng)
486感應(yīng)同步器的組成和特點(diǎn)
9598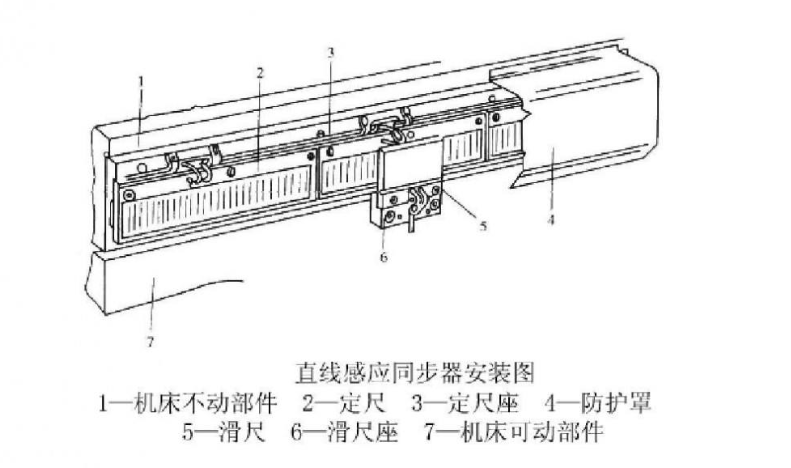
亞為USB信號(hào)采集與記錄平臺(tái)的詳細(xì)資料說(shuō)明
0感應(yīng)同步器的構(gòu)造與設(shè)備
3267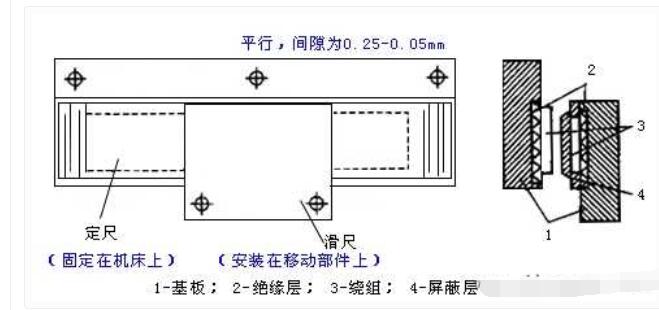
感應(yīng)同步器的運(yùn)用
2779單錐、雙錐、三錐同步器到底有什么區(qū)別
5913AD2S75:通用同步器/旋轉(zhuǎn)變壓器隔離接口過(guò)時(shí)數(shù)據(jù)表
1變速器同步器的作用及工作原理?
6622解讀同步器構(gòu)造及工作原理?
3405
什么是同步器?同步器傳輸數(shù)據(jù)的情景分析
1577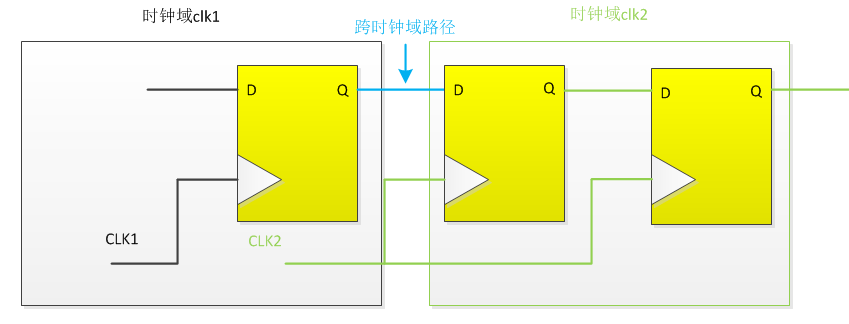
- 設(shè)計(jì)技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測(cè)量?jī)x表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無(wú)線
- 接口/總線/驅(qū)動(dòng)
- 處理器/DSP
- EDA/IC設(shè)計(jì)
- 存儲(chǔ)技術(shù)
- 光電顯示
- EMC/EMI設(shè)計(jì)
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車(chē)電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實(shí)
- 可穿戴設(shè)備
- 機(jī)器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動(dòng)通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測(cè)
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專欄推薦
- 學(xué)院
- 設(shè)計(jì)資源
- 設(shè)計(jì)技術(shù)
- 電子百科
- 電子視頻
- 元器件知識(shí)
- 工具箱
- VIP會(huì)員
- 最新技術(shù)文章
- 社區(qū)
- 小組
- 論壇
- 問(wèn)答
- 評(píng)測(cè)試用
- 企業(yè)服務(wù)
- 產(chǎn)品
- 資料
- 文章
- 方案
- 企業(yè)
- 供應(yīng)鏈服務(wù)
- 硬件開(kāi)發(fā)
- 華秋電路
- 華秋商城
- 華秋智造
- nextPCB
- BOM配單
- 媒體服務(wù)
- 網(wǎng)站廣告
- 在線研討會(huì)
- 活動(dòng)策劃
- 新聞發(fā)布
- 新品發(fā)布
- 小測(cè)驗(yàn)
- 設(shè)計(jì)大賽
- 華秋
- 關(guān)于我們
- 投資關(guān)系
- 新聞動(dòng)態(tài)
- 加入我們
- 聯(lián)系我們
- 舉報(bào)投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動(dòng)端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:[email protected]
- 內(nèi)容合作
- 黃晶晶:[email protected]
- 內(nèi)容合作(海外)
- 張迎輝:[email protected]
- 供應(yīng)鏈服務(wù) PCB/IC/PCBA
- 江良華:[email protected]
- 投資合作
- 曾海銀:[email protected]
- 社區(qū)合作
- 劉勇:[email protected]
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論