 電子發(fā)燒友App
電子發(fā)燒友App


概述:I2C通訊接口,是我們?nèi)粘?yīng)用中使用最多的MCU外設(shè)。最早在MCU沒有硬件I2C之前,都是通過GPIO口模擬I2C的時(shí)序來完成I2C通訊的。后來MCU帶有了I2C外設(shè)接口,其硬件I2C的使用也變成了日常。更主要的是,在節(jié)省MCU資源的同時(shí),其操作也變得更加簡單和易用。再后來經(jīng)過市場需求的變化,開始有了支持I2C多從機(jī)地址通訊功能的MCU,讓I2C的應(yīng)用緊跟市場需求。
雖然從I2C特性上知曉具有不同I2C地址的器件是可以掛載在同一個(gè)I2C總線上進(jìn)行通訊的,但是,如果需要操作的I2C器件地址沖突呢?MCU的硬件I2C接口數(shù)量不夠呢?或者說MCU的I2C不支持從機(jī)多地址通訊功能呢?這時(shí)候,我們還是需要通過GPIO口來模擬I2C時(shí)序完成I2C主機(jī)/從機(jī)的功能。所以,并不是有了硬件I2C,軟件I2C就沒有發(fā)揮的空間了,恰恰是軟件和硬件這兩種實(shí)現(xiàn)方式共存互相補(bǔ)充。
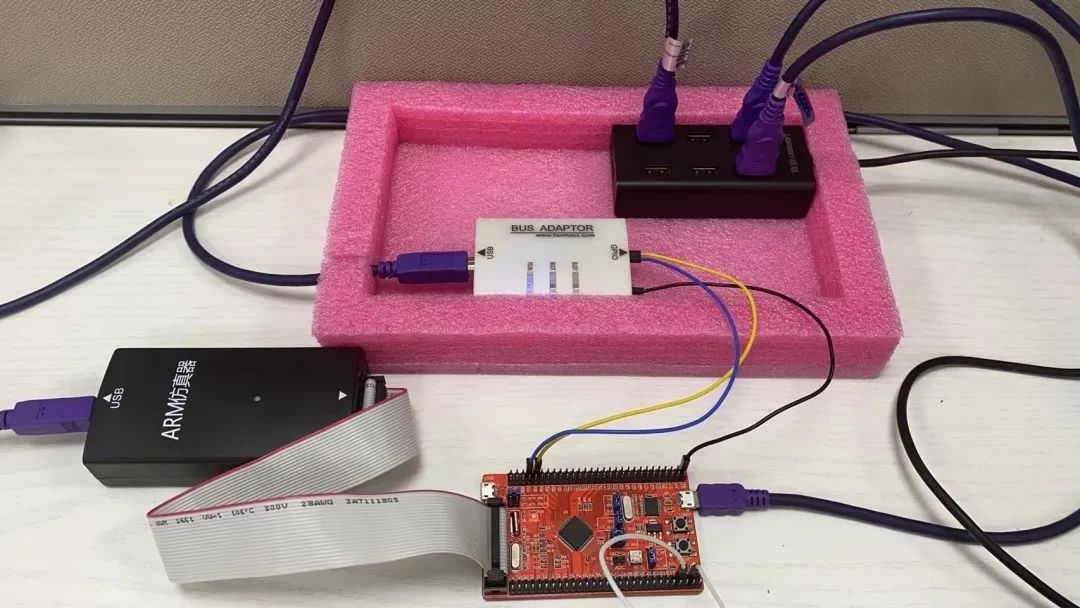
對(duì)于I2C的基本概念及時(shí)序等知識(shí)點(diǎn),本文不再詳細(xì)描述,大家可以下載附件中的《I2C總線概要》和《I2C總線規(guī)范》進(jìn)行研究。 本文將通過如下四個(gè)方面,講述I2C在MM32F032/MM32F0140系列MCU上的實(shí)現(xiàn),以及使用I2C工具(圖莫斯USB2XXX總線適配器)進(jìn)行實(shí)際測試:
硬件I2C主機(jī)通訊
軟件模擬I2C主機(jī)通訊
硬件I2C從機(jī)通訊
軟件模擬I2C從機(jī)通訊(有難度)
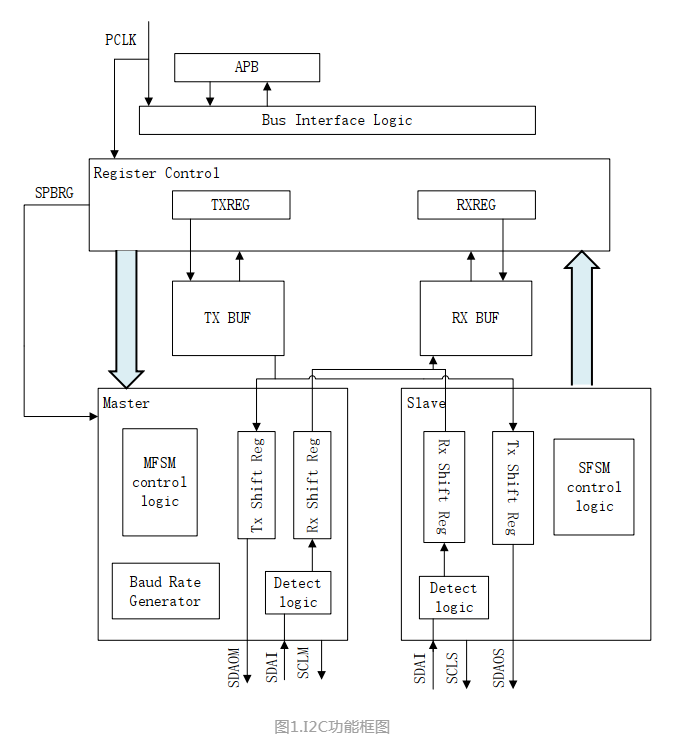
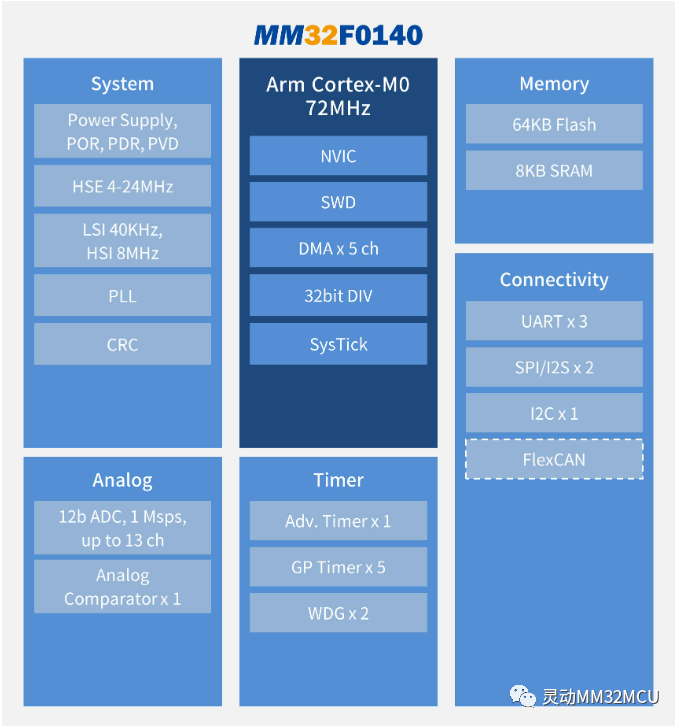
MM32F032系列MCU帶有1路硬件I2C接口,支持標(biāo)準(zhǔn)模式(數(shù)據(jù)傳輸速率為0~100kbps)和快速模式(數(shù)據(jù)最大傳輸速率為400kbps)兩種工作速率模式,其主要特征如下所示:
I2C總線協(xié)議轉(zhuǎn)換器/并行總線;
半雙工同步操作;
支持主從模式;
支持7位地址和10位地址;
支持標(biāo)準(zhǔn)模式100kbps、快速模式400kbps;
產(chǎn)生Start、Stop、Repeated Start,以及Acknowledge信號(hào)檢測;
在主機(jī)模式下只支持一個(gè)主機(jī);
分別有2個(gè)字節(jié)的發(fā)送和接收緩沖;
在SCL和SDA上增加了無毛刺電路;
支持DAM、中斷和查詢操作方式;
MM32F0140系列MCU在MM32F032的基礎(chǔ)上I2C做了更豐富的功能,支持多從機(jī)地址通訊的功能、支持時(shí)鐘延展等等……具體的可以參考官方的數(shù)據(jù)手冊(cè)。
一、硬件I2C主機(jī)通訊
MM32的硬件I2C是我使用到現(xiàn)在,在代碼程序段操作最為簡潔的了;不需要再去考慮START信號(hào)、ACK信號(hào),以及各種EVENT事件等……這些復(fù)雜的操作、或者是可以省略的操作都由官方的底層庫程序和芯片IP去實(shí)現(xiàn)了,讓我們?cè)谠O(shè)計(jì)驅(qū)動(dòng)程序時(shí)變量簡單了。 對(duì)于硬件I2C主機(jī)的配置,我們只需要復(fù)用的GPIO端口引腳、I2C通訊參數(shù),以及從機(jī)地址即可;然后就可以編程去讀寫I2C從機(jī)設(shè)備了,初始化配置及對(duì)I2C從機(jī)設(shè)備的讀寫操作的實(shí)現(xiàn)代碼如下:
?
void hI2C_MASTER_Init(uint8_t SlaveAddress){ GPIO_InitTypeDef GPIO_InitStructure; I2C_InitTypeDef I2C_InitStructure; RCC_APB1PeriphClockCmd(RCC_APB1ENR_I2C1, ENABLE); I2C_StructInit(&I2C_InitStructure); I2C_InitStructure.I2C_Mode = I2C_Mode_MASTER; I2C_InitStructure.I2C_OwnAddress = 0; I2C_InitStructure.I2C_Speed = I2C_Speed_STANDARD; I2C_InitStructure.I2C_ClockSpeed = 100000; I2C_Init(I2C1, &I2C_InitStructure); I2C_Send7bitAddress(I2C1, SlaveAddress, I2C_Direction_Transmitter); I2C_Cmd(I2C1, ENABLE); RCC_AHBPeriphClockCmd(RCC_AHBENR_GPIOB, ENABLE); GPIO_PinAFConfig(GPIOB, GPIO_PinSource6, GPIO_AF_1); GPIO_PinAFConfig(GPIOB, GPIO_PinSource7, GPIO_AF_1); GPIO_StructInit(&GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD; GPIO_Init(GPIOB, &GPIO_InitStructure);} void hI2C_MASTER_Read(uint8_t Address, uint8_t *Buffer, uint8_t Length){ uint8_t flag = 0, count = 0; I2C_SendData(I2C1, Address); while(!I2C_GetFlagStatus(I2C1, I2C_STATUS_FLAG_TFE)); for(uint8_t i = 0; i < Length; i++) { while(1) { if((I2C_GetFlagStatus(I2C1, I2C_STATUS_FLAG_TFNF)) && (flag == 0)) { I2C_ReadCmd(I2C1); count++; if(count == Length) flag = 1; } if(I2C_GetFlagStatus(I2C1, I2C_STATUS_FLAG_RFNE)) { Buffer[i] = I2C_ReceiveData(I2C1); break; } } } I2C_GenerateSTOP(I2C1, ENABLE); while(!I2C_GetFlagStatus(I2C1, I2C_FLAG_STOP_DET));} void hI2C_MASTER_Write(uint8_t Address, uint8_t *Buffer, uint8_t Length){ I2C_SendData(I2C1, Address); while(!I2C_GetFlagStatus(I2C1, I2C_STATUS_FLAG_TFE)); for(uint8_t i = 0; i < Length; i++) { I2C_SendData(I2C1, *Buffer++); while(!I2C_GetFlagStatus(I2C1, I2C_STATUS_FLAG_TFE)); } I2C_GenerateSTOP(I2C1, ENABLE); while(!I2C_GetFlagStatus(I2C1, I2C_FLAG_STOP_DET));} void hI2C_MASTER_SHELL_Handler(uint8_t Mode){ uint8_t Buffer[10] = {0x12, 0x23, 0x34, 0x45, 0x56, 0x67, 0x78, 0x89, 0x90, 0xAA}; if(Mode == 1) { hI2C_MASTER_Write(0x00, Buffer, sizeof(Buffer)); } else { hI2C_MASTER_Read(0x00, Buffer, sizeof(Buffer)); printf(" hI2C Master Read : "); for(uint8_t i = 0; i < sizeof(Buffer); i++) { printf("0x%02x ", Buffer[i]); } printf(" "); }}SHELL_EXPORT_CMD(HI2C_MASTER, hI2C_MASTER_SHELL_Handler, Hardware I2C Master Read And Write);實(shí)測結(jié)果如下所示: 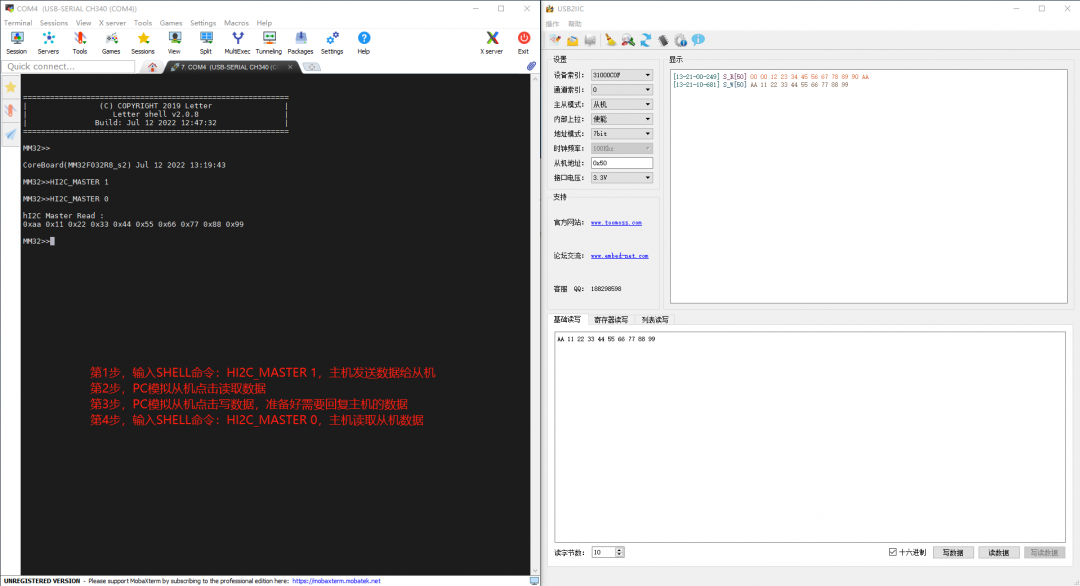
?
二、軟件模擬I2C主機(jī)通訊
對(duì)于軟件模擬I2C主機(jī)通訊的實(shí)現(xiàn)方式,主要是通過操作GPIO端口引腳的高低電平,在滿足I2C通訊時(shí)序的要求上完成對(duì)I2C從機(jī)設(shè)備的讀寫操作;在實(shí)現(xiàn)軟件模擬I2C主機(jī)時(shí),需要正確的產(chǎn)生Start起始條件、Stop停止條件,以及Restart重啟條件;需要在適當(dāng)?shù)奈恢脤?duì)GPIO端口引腳的輸入輸出狀態(tài)進(jìn)行配置,以便能夠正確的判斷出ACK和NACK的應(yīng)答信號(hào);需要正確操作發(fā)送的字節(jié)格式,使地址內(nèi)容、數(shù)據(jù)內(nèi)容能夠被正確識(shí)別……
如下的軟件模擬I2C主機(jī)的實(shí)現(xiàn)方式通過定義了一個(gè)操作結(jié)構(gòu)體,通過傳遞操作實(shí)例的方式,讓軟件模擬I2C主機(jī)的程序?qū)崿F(xiàn)了面向?qū)ο蟮木幊蹋枳⊥欢螌?shí)現(xiàn)代碼,可以同時(shí)實(shí)現(xiàn)多個(gè)軟件模擬I2C主機(jī)通訊接口,在代碼實(shí)現(xiàn)上大大的節(jié)省了空間,同時(shí)也讓代碼的可移植性變得更加通用,具體的代碼實(shí)現(xiàn)如下所示:
?
typedef struct{ uint32_t SCL_RCC; GPIO_TypeDef *SCL_GPIO; uint16_t SCL_PIN; uint32_t SDA_RCC; GPIO_TypeDef *SDA_GPIO; uint16_t SDA_PIN; uint32_t TIME; uint8_t SlaveAddress;} sI2C_MASTER_TypeDef; sI2C_MASTER_TypeDef sI2C_MASTER = { RCC_AHBENR_GPIOB, GPIOB, GPIO_Pin_6, RCC_AHBENR_GPIOB, GPIOB, GPIO_Pin_7, 100, 0xA0}; #define sI2C_MASTER_SCL_H(sI2C) GPIO_WriteBit(sI2C->SCL_GPIO, sI2C->SCL_PIN, Bit_SET)#define sI2C_MASTER_SCL_L(sI2C) GPIO_WriteBit(sI2C->SCL_GPIO, sI2C->SCL_PIN, Bit_RESET) #define sI2C_MASTER_SDA_H(sI2C) GPIO_WriteBit(sI2C->SDA_GPIO, sI2C->SDA_PIN, Bit_SET)#define sI2C_MASTER_SDA_L(sI2C) GPIO_WriteBit(sI2C->SDA_GPIO, sI2C->SDA_PIN, Bit_RESET) #define sI2C_MASTER_SCL_GET(sI2C) GPIO_ReadOutputDataBit(sI2C->SCL_GPIO, sI2C->SCL_PIN)#define sI2C_MASTER_SDA_GET(sI2C) GPIO_ReadInputDataBit( sI2C->SDA_GPIO, sI2C->SDA_PIN) void sI2C_MASTER_Delay(uint32_t Tick){ while(Tick--);} void sI2C_MASTER_SDA_SetDirection(sI2C_MASTER_TypeDef *sI2C, uint8_t Direction){ GPIO_InitTypeDef GPIO_InitStructure; RCC_AHBPeriphClockCmd(sI2C->SDA_RCC, ENABLE); GPIO_StructInit(&GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = sI2C->SDA_PIN; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; if(Direction) /* Input */ { GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; } else /* Output */ { GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; } GPIO_Init(sI2C->SDA_GPIO, &GPIO_InitStructure);} void sI2C_MASTER_SCL_SetDirection(sI2C_MASTER_TypeDef *sI2C, uint8_t Direction){ GPIO_InitTypeDef GPIO_InitStructure; RCC_AHBPeriphClockCmd(sI2C->SCL_RCC, ENABLE); GPIO_StructInit(&GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = sI2C->SCL_PIN; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; if(Direction) /* Input */ { GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; } else /* Output */ { GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; } GPIO_Init(sI2C->SCL_GPIO, &GPIO_InitStructure);} void sI2C_MASTER_GenerateStart(sI2C_MASTER_TypeDef *sI2C){ sI2C_MASTER_SDA_H(sI2C); sI2C_MASTER_Delay(sI2C->TIME); sI2C_MASTER_SCL_H(sI2C); sI2C_MASTER_Delay(sI2C->TIME); sI2C_MASTER_SDA_L(sI2C); sI2C_MASTER_Delay(sI2C->TIME); sI2C_MASTER_SCL_L(sI2C); sI2C_MASTER_Delay(sI2C->TIME);} void sI2C_MASTER_GenerateStop(sI2C_MASTER_TypeDef *sI2C){ sI2C_MASTER_SDA_L(sI2C); sI2C_MASTER_Delay(sI2C->TIME); sI2C_MASTER_SCL_H(sI2C); sI2C_MASTER_Delay(sI2C->TIME); sI2C_MASTER_SDA_H(sI2C); sI2C_MASTER_Delay(sI2C->TIME);} void sI2C_MASTER_PutACK(sI2C_MASTER_TypeDef *sI2C, uint8_t ack){ if(ack) sI2C_MASTER_SDA_H(sI2C); /* NACK */ else sI2C_MASTER_SDA_L(sI2C); /* ACK */ sI2C_MASTER_Delay(sI2C->TIME); sI2C_MASTER_SCL_H(sI2C); sI2C_MASTER_Delay(sI2C->TIME); sI2C_MASTER_SCL_L(sI2C); sI2C_MASTER_Delay(sI2C->TIME);} uint8_t sI2C_MASTER_GetACK(sI2C_MASTER_TypeDef *sI2C){ uint8_t ack = 0; sI2C_MASTER_SDA_H(sI2C); sI2C_MASTER_Delay(sI2C->TIME); sI2C_MASTER_SDA_SetDirection(sI2C, 1); sI2C_MASTER_SCL_H(sI2C); sI2C_MASTER_Delay(sI2C->TIME); ack = sI2C_MASTER_SDA_GET(sI2C); sI2C_MASTER_SCL_L(sI2C); sI2C_MASTER_Delay(sI2C->TIME); sI2C_MASTER_SDA_SetDirection(sI2C, 0); return ack;} uint8_t sI2C_MASTER_ReadByte(sI2C_MASTER_TypeDef *sI2C){ uint8_t Data = 0; sI2C_MASTER_SDA_H(sI2C); /* Must set SDA before read */ sI2C_MASTER_SDA_SetDirection(sI2C, 1); for(uint8_t i = 0; i < 8; i++) { sI2C_MASTER_SCL_H(sI2C); sI2C_MASTER_Delay(sI2C->TIME); Data <<= 1; if(sI2C_MASTER_SDA_GET(sI2C)) Data |= 0x01; sI2C_MASTER_SCL_L(sI2C); sI2C_MASTER_Delay(sI2C->TIME); } sI2C_MASTER_SDA_SetDirection(sI2C, 0); return Data;} void sI2C_MASTER_WriteByte(sI2C_MASTER_TypeDef *sI2C, uint8_t Data){ for(uint8_t i = 0; i < 8; i++) { if(Data & 0x80) sI2C_MASTER_SDA_H(sI2C); else sI2C_MASTER_SDA_L(sI2C); Data <<= 1; sI2C_MASTER_SCL_H(sI2C); sI2C_MASTER_Delay(sI2C->TIME); sI2C_MASTER_SCL_L(sI2C); sI2C_MASTER_Delay(sI2C->TIME); }} void sI2C_MASTER_Init(sI2C_MASTER_TypeDef *sI2C){ sI2C_MASTER_SDA_SetDirection(sI2C, 0); sI2C_MASTER_SCL_SetDirection(sI2C, 0); sI2C_MASTER_SCL_H(sI2C); sI2C_MASTER_Delay(sI2C->TIME); sI2C_MASTER_SDA_H(sI2C); sI2C_MASTER_Delay(sI2C->TIME);} uint8_t sI2C_MASTER_Read(sI2C_MASTER_TypeDef *sI2C, uint8_t Address, uint8_t *Buffer, uint8_t Length){ if(Length == 0) return 0; sI2C_MASTER_GenerateStart(sI2C); sI2C_MASTER_WriteByte(sI2C, sI2C->SlaveAddress); if(sI2C_MASTER_GetACK(sI2C)) { sI2C_MASTER_GenerateStop(sI2C); return 1; } sI2C_MASTER_WriteByte(sI2C, Address); if(sI2C_MASTER_GetACK(sI2C)) { sI2C_MASTER_GenerateStop(sI2C); return 1; } sI2C_MASTER_GenerateStart(sI2C); sI2C_MASTER_WriteByte(sI2C, sI2C->SlaveAddress + 1); if(sI2C_MASTER_GetACK(sI2C)) { sI2C_MASTER_GenerateStop(sI2C); return 1; } while(1) { *Buffer++ = sI2C_MASTER_ReadByte(sI2C); if(--Length == 0) { sI2C_MASTER_PutACK(sI2C, 1); break; } sI2C_MASTER_PutACK(sI2C, 0); } sI2C_MASTER_GenerateStop(sI2C); return 0;} uint8_t sI2C_MASTER_Write(sI2C_MASTER_TypeDef *sI2C, uint8_t Address, uint8_t *Buffer, uint8_t Length){ uint8_t i = 0; if(Length == 0) return 0; sI2C_MASTER_GenerateStart(sI2C); sI2C_MASTER_WriteByte(sI2C, sI2C->SlaveAddress); if(sI2C_MASTER_GetACK(sI2C)) { sI2C_MASTER_GenerateStop(sI2C); return 1; } sI2C_MASTER_WriteByte(sI2C, Address); if(sI2C_MASTER_GetACK(sI2C)) { sI2C_MASTER_GenerateStop(sI2C); return 1; } for(i = 0; i < Length; i++) { sI2C_MASTER_WriteByte(sI2C, *Buffer++); if(sI2C_MASTER_GetACK(sI2C)) break; } sI2C_MASTER_GenerateStop(sI2C); if(i == Length) return 0; else return 1;} void sI2C_MASTER_SHELL_Handler(uint8_t Mode){ uint8_t Buffer[10] = {0x11, 0x22, 0x33, 0x44, 0x55, 0xAA, 0xBB, 0xCC, 0xDD, 0xEE}; if(Mode == 1) { sI2C_MASTER_Write(&sI2C_MASTER, 0x00, Buffer, sizeof(Buffer)); } else { sI2C_MASTER_Read(&sI2C_MASTER, 0x00, Buffer, sizeof(Buffer)); printf(" sI2C Master Read : "); for(uint8_t i = 0; i < sizeof(Buffer); i++) { printf("0x%02x ", Buffer[i]); } printf(" "); }}SHELL_EXPORT_CMD(SI2C_MASTER, sI2C_MASTER_SHELL_Handler, Software I2C Master Read And Write);實(shí)測結(jié)果如下所示: 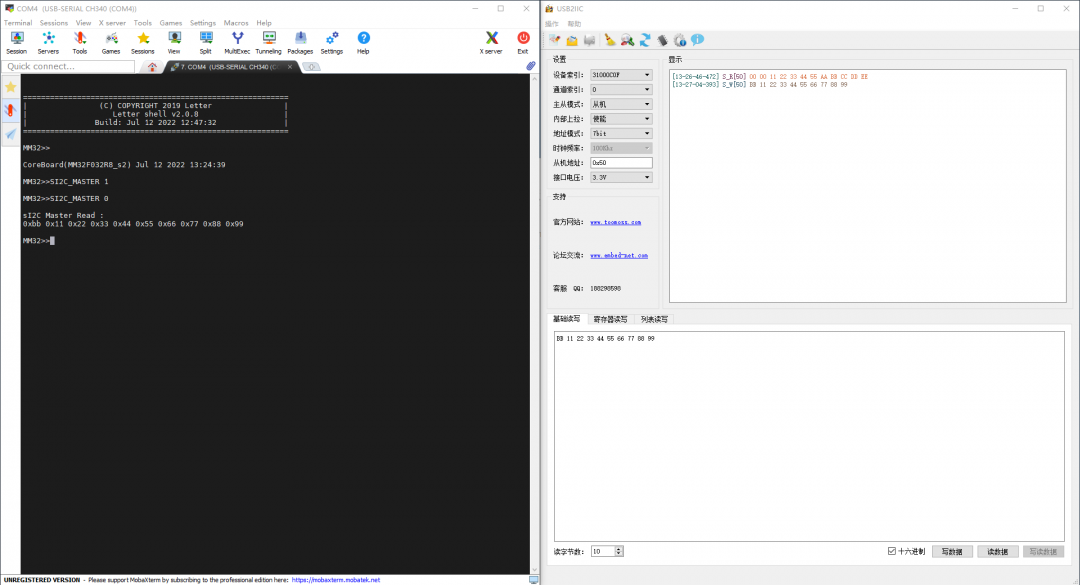
?
三、硬件I2C從機(jī)通訊
對(duì)于硬件I2C從機(jī)通訊來說,更多的是采用中斷的響應(yīng)方式來避免程序在某一處一直等待I2C主機(jī)的操作;而輪詢的方式很容易捕捉不到I2C的請(qǐng)求或者事件;所以如下硬件I2C從機(jī)通訊的方式使用的就是中斷處理方式,I2C主機(jī)任何操作和請(qǐng)求都會(huì)映射成對(duì)應(yīng)的中斷,待從機(jī)檢測到了之后,進(jìn)入中斷進(jìn)行相應(yīng)的處理,同時(shí)中斷的方式也保證了通訊的正常和穩(wěn)定性。
現(xiàn)在市面上很多MCU的I2C從機(jī)模式都支持多地址模式,但每家的IP功能設(shè)計(jì)都不一樣:有些是直接通過寄存器設(shè)置從機(jī)地址方式,這種方式限制了所支持從機(jī)地址的個(gè)數(shù);有些是通過地址掩碼的方式(類似于CAN通訊的ID濾波器),通過逐位比較的方式來判別所支持的I2C從機(jī)地址,這種方式可以支持很多個(gè)從機(jī)地址;第二種方式相比于第一種實(shí)現(xiàn)方式更靈活,支持的從機(jī)設(shè)備地址也更多!
MM32F032不支持多地址從機(jī)功能,但MM32F0140支持從機(jī)多地址通訊,可以根據(jù)實(shí)際項(xiàng)目需求選擇對(duì)應(yīng)的芯片型號(hào);從機(jī)多地址功能采用的是地址掩碼方式來過濾從機(jī)地址的,這樣可以支持更多的從機(jī)設(shè)備地址;通過設(shè)置從機(jī)設(shè)備地址和從機(jī)地址掩碼來實(shí)現(xiàn)從機(jī)多地址通訊功能;硬件I2C從機(jī)通訊具體的代碼實(shí)現(xiàn)如下:
void hI2C_SLAVE_Init(uint8_t SlaveAddress){ I2C_InitTypeDef I2C_InitStructure; GPIO_InitTypeDef GPIO_InitStructure; NVIC_InitTypeDef NVIC_InitStructure; QUEUE_INIT(QUEUE_HI2C_SLAVE_IDX); RCC_APB1PeriphClockCmd(RCC_APB1ENR_I2C1, ENABLE); I2C_StructInit(&I2C_InitStructure); I2C_InitStructure.Mode = I2C_Mode_SLAVE; I2C_InitStructure.OwnAddress = 0; I2C_InitStructure.Speed = I2C_Speed_FAST; I2C_InitStructure.ClockSpeed = 400000; I2C_Init(I2C1, &I2C_InitStructure); I2C_ITConfig(I2C1, I2C_IT_RD_REQ, ENABLE); I2C_ITConfig(I2C1, I2C_IT_RX_FULL, ENABLE); I2C_Cmd(I2C1, ENABLE); RCC_AHBPeriphClockCmd(RCC_AHBENR_GPIOB, ENABLE); GPIO_PinAFConfig(GPIOB, GPIO_PinSource6, GPIO_AF_1); GPIO_PinAFConfig(GPIOB, GPIO_PinSource7, GPIO_AF_1); GPIO_StructInit(&GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_FLOATING; GPIO_Init(GPIOB, &GPIO_InitStructure); GPIO_StructInit(&GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD; GPIO_Init(GPIOB, &GPIO_InitStructure); NVIC_InitStructure.NVIC_IRQChannel = I2C1_IRQn; NVIC_InitStructure.NVIC_IRQChannelPriority = 0; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&NVIC_InitStructure); I2C_SendSlaveAddress(I2C1, SlaveAddress);} void I2C1_IRQHandler(void){ static uint8_t Data = 0; if(I2C_GetITStatus(I2C1, I2C_IT_RD_REQ) != RESET) { I2C_ClearITPendingBit(I2C1, I2C_IT_RD_REQ); while(1) { I2C_SendData(I2C1, Data++); while(I2C_GetFlagStatus(I2C1, I2C_FLAG_TX_EMPTY) == RESET); if((Data % 10) == 0) { I2C_GenerateSTOP(I2C1, ENABLE); break; } } } if(I2C_GetITStatus(I2C1, I2C_IT_RX_FULL) != RESET) { QUEUE_WRITE(QUEUE_HI2C_SLAVE_IDX, I2C_ReceiveData(I2C1)); }}實(shí)測結(jié)果如下所示: 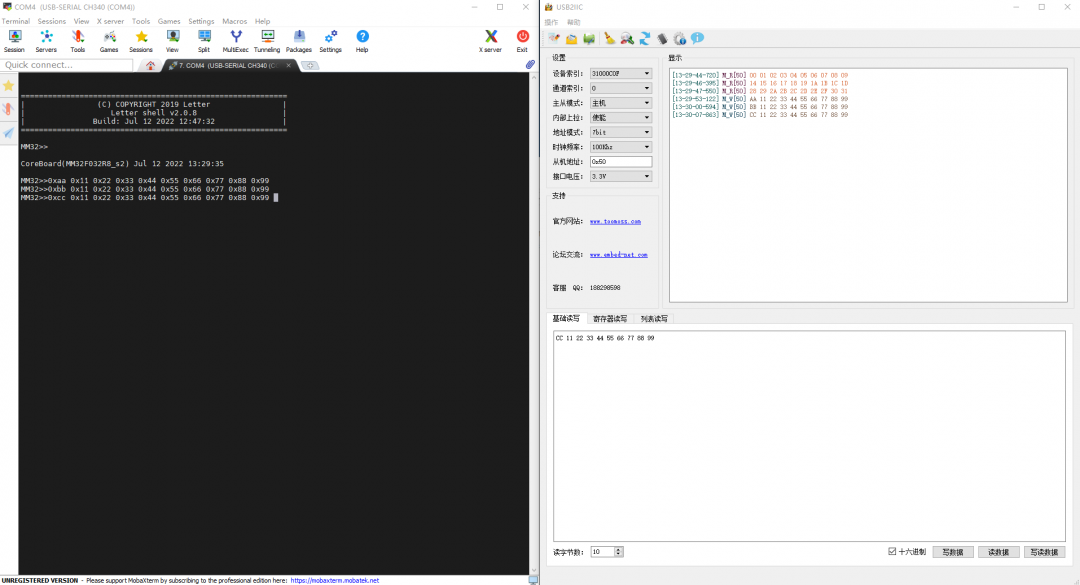
四、軟件模擬I2C從機(jī)通訊
軟件模擬I2C從機(jī)通訊是I2C通訊時(shí)序逆向的實(shí)現(xiàn)過程,它需要通過捕捉I2C主機(jī)的信號(hào)時(shí)序?qū)χ鳈C(jī)的事件、請(qǐng)求,以及發(fā)送過來的數(shù)據(jù)進(jìn)行解析,又要正確的回復(fù)I2C主機(jī),所以它的實(shí)現(xiàn)方式比I2C模擬主機(jī)完全不同。這需要開發(fā)者對(duì)I2C時(shí)序十分熟悉,所以在研讀下面軟件模擬I2C從機(jī)通訊程序時(shí),建議對(duì)照I2C時(shí)序一點(diǎn)點(diǎn)分析(提示:這部分內(nèi)容有點(diǎn)難度)。
對(duì)于軟件模擬I2C從機(jī)通訊的實(shí)現(xiàn)是通過兩個(gè)GPIO端口引腳分別與I2C主機(jī)的SCL和SDA進(jìn)行連接,程序中將這兩個(gè)GPIO端口引腳配置成外部中斷EXTI工作模式,通過捕獲GPIO端口引腳的上升沿、下降沿,以及高低電平狀態(tài),配合軟件模擬I2C從機(jī)的狀態(tài)管理,實(shí)現(xiàn)與I2C主機(jī)之間的通訊功能,在如下的程序中添加了詳細(xì)的注釋和說明,方便大家閱讀和理解,具體的代碼實(shí)現(xiàn)如下:
typedef struct{ uint32_t SCL_RCC; GPIO_TypeDef *SCL_GPIO; uint16_t SCL_PIN; uint8_t SCL_EXTI_PortSource; uint8_t SCL_EXTI_PinSource; uint32_t SCL_EXTI_Line; uint32_t SDA_RCC; GPIO_TypeDef *SDA_GPIO; uint16_t SDA_PIN; uint8_t SDA_EXTI_PortSource; uint8_t SDA_EXTI_PinSource; uint32_t SDA_EXTI_Line; uint8_t SlaveAddress;} sI2C_SLAVE_TypeDef; sI2C_SLAVE_TypeDef sI2C_SLAVE = { RCC_AHBENR_GPIOB, GPIOB, GPIO_Pin_6, EXTI_PortSourceGPIOB, EXTI_PinSource6, EXTI_Line6, RCC_AHBENR_GPIOB, GPIOB, GPIO_Pin_7, EXTI_PortSourceGPIOB, EXTI_PinSource7, EXTI_Line7, 0xA0,}; #define sI2C_SLAVE_STATE_NA 0#define sI2C_SLAVE_STATE_STA 1#define sI2C_SLAVE_STATE_ADD 2#define sI2C_SLAVE_STATE_ADD_ACK 3#define sI2C_SLAVE_STATE_DAT 4#define sI2C_SLAVE_STATE_DAT_ACK 5#define sI2C_SLAVE_STATE_STO 6 uint8_t sI2C_SLAVE_State = sI2C_SLAVE_STATE_NA; uint8_t sI2C_SLAVE_ShiftCounter = 0;uint8_t sI2C_SLAVE_SlaveAddress = 0;uint8_t sI2C_SLAVE_ReceivedData = 0;uint8_t sI2C_SLAVE_TransmitData = 0x50; uint8_t sI2C_SLAVE_TransmitBuffer[16] = { 0x01, 0x12, 0x23, 0x34, 0x45, 0x56, 0x67, 0x78, 0x89, 0x9A, 0xAB, 0xBC, 0xCD, 0xDE, 0xEF, 0xF0,};uint8_t sI2C_SLAVE_TransmitIndex = 0; bool sI2C_SLAVE_READ_SCL(sI2C_SLAVE_TypeDef *sI2C){ return GPIO_ReadInputDataBit(sI2C->SCL_GPIO, sI2C->SCL_PIN);} bool sI2C_SLAVE_READ_SDA(sI2C_SLAVE_TypeDef *sI2C){ return GPIO_ReadInputDataBit(sI2C->SDA_GPIO, sI2C->SDA_PIN);} /******************************************************************************* * [url=home.php?mod=space&uid=247401]@brief[/url] 配置模擬I2C的GPIO端口, 默認(rèn)設(shè)置成輸入模式, 并使能相應(yīng)的外部觸發(fā) * 中斷功能(上升沿和下降沿) * @param * @retval * [url=home.php?mod=space&uid=93590]@Attention[/url] *******************************************************************************/ void sI2C_SLAVE_Init(sI2C_SLAVE_TypeDef *sI2C){ GPIO_InitTypeDef GPIO_InitStructure; EXTI_InitTypeDef EXTI_InitStructure; NVIC_InitTypeDef NVIC_InitStructure; RCC_AHBPeriphClockCmd(sI2C->SCL_RCC, ENABLE); RCC_AHBPeriphClockCmd(sI2C->SDA_RCC, ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_SYSCFG, ENABLE); GPIO_StructInit(&GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = sI2C->SCL_PIN; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; GPIO_Init(sI2C->SCL_GPIO, &GPIO_InitStructure); GPIO_StructInit(&GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = sI2C->SDA_PIN; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; GPIO_Init(sI2C->SDA_GPIO, &GPIO_InitStructure); SYSCFG_EXTILineConfig(sI2C->SCL_EXTI_PortSource, sI2C->SCL_EXTI_PinSource); EXTI_StructInit(&EXTI_InitStructure); EXTI_InitStructure.EXTI_Line = sI2C->SCL_EXTI_Line; EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt; EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising_Falling; EXTI_InitStructure.EXTI_LineCmd = ENABLE; EXTI_Init(&EXTI_InitStructure); SYSCFG_EXTILineConfig(sI2C->SDA_EXTI_PortSource, sI2C->SDA_EXTI _PinSource); EXTI_StructInit(&EXTI_InitStructure); EXTI_InitStructure.EXTI_Line = sI2C->SDA_EXTI_Line; EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt; EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising_Falling; EXTI_InitStructure.EXTI_LineCmd = ENABLE; EXTI_Init(&EXTI_InitStructure); NVIC_InitStructure.NVIC_IRQChannel = EXTI4_15_IRQn; NVIC_InitStructure.NVIC_IRQChannelPriority = 0x00; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&NVIC_InitStructure);} /******************************************************************************* * [url=home.php?mod=space&uid=247401]@brief[/url] 設(shè)置SDA信號(hào)線的輸入輸出方便, 0代表Output輸出, 1代表Input輸入 * @param * @retval * [url=home.php?mod=space&uid=93590]@Attention[/url] *******************************************************************************/ void sI2C_SLAVE_SDA_SetDirection(sI2C_SLAVE_TypeDef *sI2C, uint8_t Direction){ GPIO_InitTypeDef GPIO_InitStructure; if(Direction) /* Input */ { GPIO_StructInit(&GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = sI2C->SDA_PIN; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; GPIO_Init(sI2C->SDA_GPIO, &GPIO_InitStructure); } else /* Output */ { GPIO_StructInit(&GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = sI2C->SDA_PIN; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD; GPIO_Init(sI2C->SDA_GPIO, &GPIO_InitStructure); }} /****************************************************************************** * @brief 設(shè)置SDA信號(hào)線的輸出電平(高電平 / 低電平) * @param * @retval * @attention ******************************************************************************/ void sI2C_SLAVE_SDA_SetLevel(sI2C_SLAVE_TypeDef *sI2C, uint8_t Level){ sI2C_SLAVE_SDA_SetDirection(sI2C, 0); if(Level) { GPIO_WriteBit(sI2C->SDA_GPIO, sI2C->SDA_PIN, Bit_SET); } else { GPIO_WriteBit(sI2C->SDA_GPIO, sI2C->SDA_PIN, Bit_RESET); }} /****************************************************************************** * @brief 當(dāng)SCL觸發(fā)上升沿外部中斷時(shí)的處理 * @param * @retval * @attention ******************************************************************************/ void sI2C_SLAVE_SCL_RiseHandler(sI2C_SLAVE_TypeDef *sI2C){ /* SCL為上升沿, 數(shù)據(jù)鎖定, 主從機(jī)從SDA總線上獲取數(shù)據(jù)位 */ switch(sI2C_SLAVE_State) { case sI2C_SLAVE_STATE_ADD: /* I2C發(fā)送遵義MSB, 先發(fā)送高位, 再發(fā)送低位, 所以在接收的時(shí)候, 數(shù)據(jù)進(jìn)行左移 */ sI2C_SLAVE_SlaveAddress <<= 1; sI2C_SLAVE_ShiftCounter += 1; if(sI2C_SLAVE_READ_SDA(sI2C) == Bit_SET) { sI2C_SLAVE_SlaveAddress |= 0x01; } /* 當(dāng)接收到8位地址位后, 從機(jī)需要在第9個(gè)時(shí)鐘給出ACK應(yīng)答, 等待SCL下降沿的時(shí)候給出ACK信號(hào) */ if(sI2C_SLAVE_ShiftCounter == 8) { sI2C_SLAVE_State = sI2C_SLAVE_STATE_ADD_ACK; } break; case sI2C_SLAVE_STATE_ADD_ACK: /* 從機(jī)地址的ACK回復(fù)后, 切換到收發(fā)數(shù)據(jù)狀態(tài) */ sI2C_SLAVE_State = sI2C_SLAVE_STATE_DAT; sI2C_SLAVE_ShiftCounter = 0; /* 數(shù)據(jù)移位計(jì)數(shù)器清零 */ sI2C_SLAVE_ReceivedData = 0; /* sI2C_SLAVE的接收數(shù)據(jù)清零 */ break; case sI2C_SLAVE_STATE_DAT: if((sI2C_SLAVE_SlaveAddress & 0x01) == 0x00) { /* 主機(jī)寫操作:此時(shí)從機(jī)應(yīng)該獲取主機(jī)發(fā)送的SDA信號(hào)線電平狀態(tài), 進(jìn)行位存儲(chǔ) */ sI2C_SLAVE_ReceivedData <<= 1; sI2C_SLAVE_ShiftCounter += 1; if(sI2C_SLAVE_READ_SDA(sI2C) == Bit_SET) { sI2C_SLAVE_ReceivedData |= 0x01; } /* 當(dāng)收到一個(gè)完整的8位數(shù)據(jù)時(shí), 將收到的數(shù)據(jù)存放到I2C接收消息隊(duì)列中, 狀態(tài)轉(zhuǎn)換到給主機(jī)發(fā)送ACK應(yīng)答 */ if(sI2C_SLAVE_ShiftCounter == 8) { QUEUE_WRITE(QUEUE_SI2C_SLAVE_IDX, sI2C_SLAVE_ReceivedData); sI2C_SLAVE_ShiftCounter = 0; /* 數(shù)據(jù)移位計(jì)數(shù)器清零 */ sI2C_SLAVE_ReceivedData = 0; /* sI2C_SLAVE的接收數(shù)據(jù)清零 */ sI2C_SLAVE_State = sI2C_SLAVE_STATE_DAT_ACK; } } else { /* 主機(jī)讀操作:在SCL上升沿的時(shí)候, 主機(jī)獲取當(dāng)前SDA的狀態(tài)位, 如果到了第8個(gè)數(shù)位的上升沿, * 那接下來就是主機(jī)回復(fù)從機(jī)的應(yīng)答或非應(yīng)答信號(hào)了, 所以將狀態(tài)切換到等待ACK的狀態(tài), 同時(shí)準(zhǔn)備下一個(gè)需要發(fā)送的數(shù)據(jù) */ if(sI2C_SLAVE_ShiftCounter == 8) { sI2C_SLAVE_ShiftCounter = 0; /* sI2C_SLAVE的接收數(shù)據(jù)清零 */ sI2C_SLAVE_TransmitData = sI2C_SLAVE_TransmitBuffer[sI2C_SLAVE_TransmitIndex++]; sI2C_SLAVE_TransmitIndex %= 16; sI2C_SLAVE_State = sI2C_SLAVE_STATE_DAT_ACK; } } break; case sI2C_SLAVE_STATE_DAT_ACK: if((sI2C_SLAVE_SlaveAddress & 0x01) == 0x00) { /* 主機(jī)寫操作:從機(jī)發(fā)送ACK, 等待主機(jī)讀取從機(jī)發(fā)送的ACK信號(hào) */ sI2C_SLAVE_State = sI2C_SLAVE_STATE_DAT; /* 狀態(tài)切換到數(shù)據(jù)接收狀態(tài) */ } else { /* 主機(jī)讀操作:主機(jī)發(fā)送ACK, 從機(jī)可以讀取主機(jī)發(fā)送的ACK信號(hào) */ uint8_t ack = sI2C_SLAVE_READ_SDA(sI2C); if(ack == Bit_RESET) { sI2C_SLAVE_State = sI2C_SLAVE_STATE_DAT; /* 接收到 ACK, 繼續(xù)發(fā)送數(shù)據(jù) */ } else { sI2C_SLAVE_State = sI2C_SLAVE_STATE_STO; /* 接收到NACK, 停止發(fā)送數(shù)據(jù) */ } } break; default: break; }} /****************************************************************************** * @brief 當(dāng)SCL觸發(fā)下降沿外部中斷時(shí)的處理 * @param * @retval * @attention ****************************************************************************** /void sI2C_SLAVE_SCL_FallHandler(sI2C_SLAVE_TypeDef *sI2C){ /* SCL為下降沿, 數(shù)據(jù)可變 */ switch(sI2C_SLAVE_State) { case sI2C_SLAVE_STATE_STA: /* * 檢測到START信號(hào)后, SCL第一個(gè)下降沿表示開始傳輸Slave Address, * 根據(jù)數(shù)據(jù)有效性的規(guī)則, 地址的第一位需要等到SCL變?yōu)楦唠娖綍r(shí)才可以讀取 * 切換到獲取Slave Address的狀態(tài), 等待SCL的上升沿觸發(fā) */ sI2C_SLAVE_State = sI2C_SLAVE_STATE_ADD; sI2C_SLAVE_ShiftCounter = 0; /* 數(shù)據(jù)移位計(jì)數(shù)器清零 */ sI2C_SLAVE_SlaveAddress = 0; /* sI2C_SLAVE的從機(jī)地址清零 */ sI2C_SLAVE_ReceivedData = 0; /* sI2C_SLAVE的接收數(shù)據(jù)清零 */ break; case sI2C_SLAVE_STATE_ADD: /* * 在主機(jī)發(fā)送Slave Address的時(shí)候, 從機(jī)只是讀取SDA狀態(tài), 進(jìn)行地址解析, 所以這邊沒有處理 */ break; case sI2C_SLAVE_STATE_ADD_ACK: /* SCL低電平的時(shí)候, 給I2C總線發(fā)送地址的應(yīng)答信號(hào), 狀態(tài)不發(fā)生改變, 等待下一個(gè)上升沿將ACK發(fā)送出去 */ sI2C_SLAVE_SDA_SetLevel(sI2C, 0); /* 將SDA信號(hào)拉低, 向主機(jī)發(fā)送ACK信號(hào) */ break; case sI2C_SLAVE_STATE_DAT: /* 在SCL時(shí)鐘信號(hào)的下降沿, SDA信號(hào)線處理可變的狀態(tài) */ if((sI2C_SLAVE_SlaveAddress & 0x01) == 0x00) { /* 主機(jī)寫操作:將SDA信號(hào)線設(shè)置成獲取狀態(tài), 等待下一個(gè)SCL上升沿時(shí)獲取數(shù)據(jù)位 */ sI2C_SLAVE_SDA_SetDirection(sI2C, 1); } else { /* 主機(jī)讀操作:根據(jù)發(fā)送的數(shù)據(jù)位設(shè)置SDA信號(hào)線的輸出電平, 等待下一個(gè)SCL上升沿時(shí)發(fā)送數(shù)據(jù)位 */ if(sI2C_SLAVE_TransmitData & 0x80) { sI2C_SLAVE_SDA_SetLevel(sI2C, 1); } else { sI2C_SLAVE_SDA_SetLevel(sI2C, 0); } sI2C_SLAVE_TransmitData <<= 1; sI2C_SLAVE_ShiftCounter += 1; } break; case sI2C_SLAVE_STATE_DAT_ACK: /* 在第8個(gè)SCL時(shí)鐘信號(hào)下降沿的處理 */ if((sI2C_SLAVE_SlaveAddress & 0x01) == 0x00) { /* 主機(jī)寫操作:從機(jī)在接收到數(shù)據(jù)后, 需要給主機(jī)一個(gè)ACK應(yīng)答信號(hào), 狀態(tài)不發(fā)生改變, 等待下一個(gè)上升沿將ACK發(fā)送出去 */ sI2C_SLAVE_SDA_SetLevel(sI2C, 0); /* 將SDA信號(hào)拉低, 向主機(jī)發(fā)送ACK信號(hào) */ } else { /* 主機(jī)讀操作:從機(jī)需要釋放當(dāng)前的SDA信號(hào)線, 以便主機(jī)發(fā)送ACK或NACK給從機(jī), 狀態(tài)不發(fā)生改變, 等待下一個(gè)上升沿讀取ACK信號(hào) */ sI2C_SLAVE_SDA_SetDirection(sI2C, 1); } break; default: break; }} /** * @brief 當(dāng)SDA觸發(fā)上升沿外部中斷時(shí)的處理 * @param None * @retval None */void sI2C_SLAVE_SDA_RiseHandler(sI2C_SLAVE_TypeDef *sI2C){ if(sI2C_SLAVE_READ_SCL(sI2C) == Bit_SET) /* SCL為高時(shí),SDA為上升沿:STOP */ { sI2C_SLAVE_State = sI2C_SLAVE_STATE_STO; } else /* SCL為低時(shí),SDA為上升沿:數(shù)據(jù)的變化 */ { }} /** * @brief 當(dāng)SDA觸發(fā)下降沿外部中斷時(shí)的處理 * @param None * @retval None */void sI2C_SLAVE_SDA_FallHandler(sI2C_SLAVE_TypeDef *sI2C){ if(sI2C_SLAVE_READ_SCL(sI2C) == Bit_SET) /* SCL為高時(shí),SDA為下降沿:START */ { sI2C_SLAVE_State = sI2C_SLAVE_STATE_STA; } else /* SCL為低時(shí),SDA為下降沿:數(shù)據(jù)的變化 */ { }} /******************************************************************************* * @brief * @param * @retval * @attention *******************************************************************************/ void EXTI4_15_IRQHandler(void){ /* I2C SCL */ if(EXTI_GetITStatus(sI2C_SLAVE.SCL_EXTI_Line) != RESET) { if(sI2C_SLAVE_READ_SCL(&sI2C_SLAVE) == Bit_SET) { sI2C_SLAVE_SCL_RiseHandler(&sI2C_SLAVE); } else { sI2C_SLAVE_SCL_FallHandler(&sI2C_SLAVE); } EXTI_ClearITPendingBit(sI2C_SLAVE.SCL_EXTI_Line); } /* I2C SDA */ if(EXTI_GetITStatus(sI2C_SLAVE.SDA_EXTI_Line) != RESET) { if(sI2C_SLAVE_READ_SDA(&sI2C_SLAVE) == Bit_SET) { sI2C_SLAVE_SDA_RiseHandler(&sI2C_SLAVE); } else { sI2C_SLAVE_SDA_FallHandler(&sI2C_SLAVE); } EXTI_ClearITPendingBit(sI2C_SLAVE.SDA_EXTI_Line); }}實(shí)測結(jié)果如下所示:
以上就是基于MM32生態(tài)實(shí)現(xiàn)I2C接口通訊的幾種方式了。
編輯:黃飛
?













 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論