作者:吳 輝,羅富文,杜文廣 運(yùn)用低功耗Cortex—M3微控制器STM32F103VBT6和FPGA芯片設(shè)計一種基于CAN總線的運(yùn)動控制器。介紹系統(tǒng)的體系結(jié)構(gòu)、主要硬件設(shè)計和軟件結(jié)構(gòu)。利用FPGA
2021-03-24 14:50:52 8072
8072 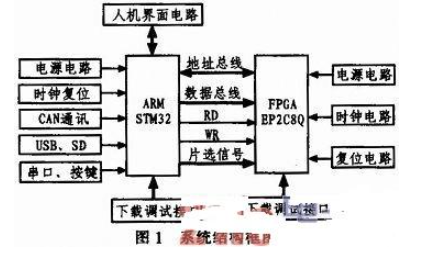
這是德國思泰生產(chǎn)的一種8軸運(yùn)動控制卡技術(shù)指標(biāo),配置說明等。
2016-06-12 17:32:04
設(shè)計了一種多通道頻率測量系統(tǒng)。系統(tǒng)由模擬開關(guān)、信號調(diào)理電路、FPGA、總線驅(qū)動電路構(gòu)成,實(shí)現(xiàn)對頻率信號的分壓、放大、濾波、比較、測量,具備回路自測試功能,可與主設(shè)備進(jìn)行數(shù)據(jù)交互,具有精度高、可擴(kuò)展
2019-06-27 07:23:11
在數(shù)控行業(yè),經(jīng)常會用到運(yùn)動控制器,下面介紹一種基于MCX514的四軸運(yùn)動控制器設(shè)計方案,為其它技術(shù)開發(fā)人員提供一些參考,方案整體的架構(gòu)如下圖所示:四軸運(yùn)動控器通過網(wǎng)絡(luò)通信,可同時控制四個運(yùn)動軸,運(yùn)動
2017-09-22 16:24:58
多軸伺服控制同步精密運(yùn)動 精密加工是一個多步驟過程,先是粗略切削,然后經(jīng)過多道精細(xì)切削才能達(dá)到要求。多個電機(jī)驅(qū)動進(jìn)給主軸和多個絲杠來定位工具頭。電機(jī)位置與速度伺服驅(qū)動器的功率和剛度決定了支持特定表面
2016-01-25 16:48:48
控制器是一種特殊的PLC,專職用于運(yùn)動控制。CNC是計算機(jī)數(shù)字控制機(jī)床(Computer numerical control,即數(shù)控機(jī)床)的簡稱,是一種由程序控制的自動化機(jī)床。CNC的運(yùn)動控制裝置以前
2022-03-03 15:43:50
什么是運(yùn)動控制器運(yùn)動控制器的特點(diǎn)運(yùn)動控制器的控制形式什么是PLCPLC的特點(diǎn)運(yùn)動控制器與PLC的區(qū)別
2021-03-02 06:52:24
速控制、I/O 信號的檢測處理,均由硬件和固件實(shí)現(xiàn),確保了運(yùn)動控制高速、高精度及系統(tǒng)穩(wěn)定。? DMC600M 系列運(yùn)動控制器,可控制 1~6 個步進(jìn)或伺服電機(jī),具有二~六軸直線插補(bǔ)、XY/UV 同時圓弧
2019-09-12 11:36:00
和靈活性,可實(shí)時完成運(yùn)動控制過程中復(fù)雜的邏輯處理和控制算法,能實(shí)現(xiàn)多軸高速高精度的伺服控制。本文選用DSP與FPGA作為運(yùn)動控制器的核心部件,設(shè)計了通用型運(yùn)動控制器。其中DSP用于運(yùn)動軌跡規(guī)劃、速度控制
2019-07-31 08:15:26
運(yùn)動控制器是運(yùn)動控制系統(tǒng)的核心部件。目前,國內(nèi)的運(yùn)動控制器大致可以分為3類:第1類是以單片機(jī)等微處理器作為控制核心的運(yùn)動控制器。這類運(yùn)動控制器速度較慢、精度不高、成本相對較低,只能在一些低速運(yùn)行和對軌跡要求不高的輪廓運(yùn)動控制場合應(yīng)用。
2019-10-16 06:22:14
運(yùn)動控制器就是控制電動機(jī)的運(yùn)行方式的專用控制器:比如電動機(jī)在由行程開關(guān)控制交流接觸器而實(shí)現(xiàn)電動機(jī)拖動物體向上運(yùn)行達(dá)到指定位置后又向下運(yùn)行,或者用時間繼電器控制電動機(jī)正反轉(zhuǎn)或轉(zhuǎn)一會停一會再轉(zhuǎn)一會再停
2021-09-07 07:40:34
過程中電路板無需保持運(yùn)動狀態(tài)。 運(yùn)動傳感控制器業(yè)界領(lǐng)先的研發(fā)公司Movea首席執(zhí)行官Sam Guilaume表示:“意法半導(dǎo)體滿足市場對成本效益型運(yùn)動傳感器的需求,在一個模塊內(nèi)集成多個運(yùn)動傳感器。我們
2018-11-14 16:36:40
各位大俠,求助呀~運(yùn)動控制卡采用的是ni公司PCI-7350,用labview編寫運(yùn)動控制系統(tǒng)。以前沒有編寫過大型的系統(tǒng),沒什么經(jīng)驗,大俠們有沒有相關(guān)的資料,特別是編寫的相關(guān)的例子。單軸,雙軸,三軸的就行了~~~求救呀~~~{:4:}
2013-03-12 16:07:11
項目名稱:9軸組態(tài)運(yùn)動控制器試用計劃:運(yùn)動控制器產(chǎn)品設(shè)計,多軸控制。帶組態(tài)功能,USB功能。10寸觸摸屏人機(jī)界面交互。
2017-08-01 11:30:56
ZMC408SCAN 激光振鏡運(yùn)動控制器是正運(yùn)動技術(shù)推出的高性能總線雙振鏡運(yùn)動控制器,專為工業(yè)激光+振鏡+運(yùn)動控制方面的應(yīng)用而設(shè)計,通過 EtherCAT 總線和脈沖軸接口能實(shí)現(xiàn)多軸運(yùn)動控制
2023-05-10 15:06:30
運(yùn)動控制器是用來實(shí)現(xiàn)機(jī)械運(yùn)動準(zhǔn)確的位置控制、速度控制、加速度控制、轉(zhuǎn)矩或力的控制。運(yùn)動控制器按結(jié)構(gòu)分類可分為PLC可編程邏輯控制器、單片機(jī)控制器、獨(dú)立式運(yùn)動控制器、基于PC機(jī)的運(yùn)動控制卡、網(wǎng)絡(luò)控制器
2021-08-02 10:04:58
求大佬介紹一種通用SDRAM控制器的FPGA模塊化解決方案
2021-04-08 06:40:34
.◆預(yù)備吸料時間設(shè)置.◆清網(wǎng)時間參數(shù)設(shè)置.◆清網(wǎng)間隔時間設(shè)置◆3路繼電器控制輸出(報警、吸料、除塵)◆2路數(shù)字量保護(hù)輸入(電機(jī)過載等) 單軸運(yùn)動控制器CT1101/包裝機(jī)控制器開發(fā)/深圳專業(yè)控制器設(shè)計單
2011-12-28 09:59:58
.◆預(yù)備吸料時間設(shè)置.◆清網(wǎng)時間參數(shù)設(shè)置.◆清網(wǎng)間隔時間設(shè)置◆3路繼電器控制輸出(報警、吸料、除塵)◆2路數(shù)字量保護(hù)輸入(電機(jī)過載等) 單軸運(yùn)動控制器CT1101/包裝機(jī)控制器開發(fā)/深圳專業(yè)控制器設(shè)計單
2011-12-28 10:03:54
現(xiàn)在市場上有基于FPGA的多電機(jī)運(yùn)動控制器的成品嗎,注意是成品喲,成品!成品!成品!
2016-01-19 11:22:17
目前伺服控制器的設(shè)計多以DSP或MCU為控制核心,但DSP的靈活性不如FPGA,且在某些環(huán)境比較惡劣的條件如高溫高壓下DSP的應(yīng)用效果會大打折扣,因此以FPGA為控制核心,對應(yīng)用于機(jī)載三軸伺服控制平臺的控制器進(jìn)行了設(shè)計與優(yōu)化。
2019-07-16 07:41:04
步進(jìn)電機(jī)是一種完全數(shù)字化的電動執(zhí)行機(jī)構(gòu),從原理上說,其角位移與驅(qū)動脈沖的個數(shù)成正比,在正常情況下,步進(jìn)電機(jī)具有使用簡單、運(yùn)動精確、連續(xù)運(yùn)行無累積誤差等特點(diǎn),因而被廣泛應(yīng)用于各種位置控制系統(tǒng)中。當(dāng)前
2019-09-19 06:55:10
自主設(shè)計 了一種雙核四軸運(yùn)動控制器 。該 運(yùn)動控制器 以 MCX314As與 STM32為核心 硬件 。該控制 器不僅能夠完成 四軸 的位置 、速度和 s曲線 的加減 速控 制等功能 ,還 能夠
2023-09-19 08:08:55
(FPGA)作為核心處理器的協(xié)處理架構(gòu)的開放式運(yùn)動控制器。該控制器將PC機(jī)和DSP的信息處理能力與FPGA的外圍擴(kuò)展功能很好的結(jié)合在一起,具有信息處理能力強(qiáng)、模塊化、開放程度高、運(yùn)動軌跡控制精確等優(yōu)點(diǎn)。
2019-09-04 07:10:42
(FPGA)作為核心處理器的協(xié)處理架構(gòu)的開放式運(yùn)動控制器。該控制器將PC機(jī)和DSP的信息處理能力與FPGA的外圍擴(kuò)展功能很好的結(jié)合在一起,具有信息處理能力強(qiáng)、模塊化、開放程度高、運(yùn)動軌跡控制精確等優(yōu)點(diǎn)。
2019-08-30 08:27:17
基于DSP與FPGA的運(yùn)動控制器設(shè)計 設(shè) 計 了 一 種 基 于 和 的 四 軸 伺 服 電 機(jī) 運(yùn) 動 控 制 器 該 控 制 器 選 用 與 作為 核 心 部 件 針 對 運(yùn) 動 控 制 中
2012-08-11 11:54:11
基于DSP與FPGA的運(yùn)動控制器設(shè)計設(shè)計了一種基于DSP和FPGA的四軸伺服電機(jī)運(yùn)動控制器,該控制器選用DSP與FPGA作為核心部件。針對運(yùn)動控制中的一些具體問題,如高速、高精度、實(shí)時控制等,規(guī)劃
2009-09-19 09:43:00
的執(zhí)行必須與同一個時鐘同步。第一種同步很好理解,它是網(wǎng)絡(luò)控制器的固有部分。然而,第二種同步到目前為止一直為人所忽視,如今成為運(yùn)動控制性能的瓶頸。
2019-07-30 07:56:47
如何實(shí)現(xiàn)基于STM32對于三軸機(jī)械臂控制器設(shè)計?
2021-12-21 06:46:42
如何實(shí)現(xiàn)基于STM32對于三軸機(jī)械臂控制器設(shè)計?
2021-12-21 06:37:56
本文提出了一種基于FPGA的SDRAM控制器的設(shè)計方法,并用Verilog給于實(shí)現(xiàn),仿真結(jié)果表明通過該方法設(shè)計實(shí)現(xiàn)的控制器可以在FPGA芯片內(nèi)組成如圖1所示的SDRAM接口,從而使得系統(tǒng)用戶對SDRAM的操作非常方便。
2021-04-15 06:46:56
作者:李木國 彭平良0 引言傳統(tǒng)的運(yùn)動控制卡多采用單片機(jī)作為微處理器, 通過一些大規(guī)模集成電路實(shí)現(xiàn)對伺服電機(jī)的控制。由于其結(jié)構(gòu)較為復(fù)雜,因此在工作時,存在高頻響應(yīng)慢、控制精度低等缺點(diǎn)。本文提出一種以
2019-07-30 06:07:06
定的限制,難以獨(dú)立運(yùn)行和小型化。針對這些問題,設(shè)計了一種基于ARM+DSP的嵌入式運(yùn)動控制器。該控制器將嵌入式CPU與專用運(yùn)動控制芯片相結(jié)合,將運(yùn)動控制功能以功能模塊的方式嵌入到ARM主控板的架構(gòu),把
2019-07-31 07:52:19
如何利用C51匯編去實(shí)現(xiàn)一種時間控制器呢?如何對時間控制器進(jìn)行proteus仿真呢?
2022-01-26 07:32:30
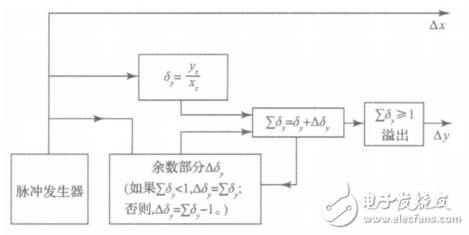
的邏輯處理和控制算法,能實(shí)現(xiàn)多軸高速高精度的伺服控制。利用DSP與FPGA設(shè)計運(yùn)動控制器,其中DSP用于運(yùn)動軌跡規(guī)劃、速度控制及位置控制等功能;FPGA完成運(yùn)動控制器的精插補(bǔ)功能,用于精確計算步進(jìn)電機(jī)或伺服驅(qū)動元件的控制脈沖,同時接收并處理脈沖型位置反饋信號。那么,我們具體該怎么做呢?
2019-08-06 06:27:00
基于FPGA的SDRAM控制器包括哪些部分呢?如何去實(shí)現(xiàn)一種基于FPGA的SDRAM控制器設(shè)計呢?
2021-11-04 06:47:44
如何去實(shí)現(xiàn)一種基于STM32的智能交通燈控制器的設(shè)計呢?有哪幾種方案呢?
2021-11-26 06:50:19
基于STM32的頻率控制器具有哪些功能呢?如何去實(shí)現(xiàn)一種基于STM32頻率控制器的功能設(shè)計呢?
2022-01-25 07:18:24
一種基于OHCI的嵌入式USB主機(jī)控制器接口實(shí)現(xiàn)
2021-06-02 06:50:43
如何去實(shí)現(xiàn)一種視頻控制器的設(shè)計?
2021-06-04 06:03:31
模糊PID溫度控制系統(tǒng)的硬件電路包括哪幾部分呢?如何去設(shè)計一種基于STM32控制器的模糊PID溫度控制系統(tǒng)呢?
2021-12-23 07:08:20
本文介紹了一種基于CAN總線的客房通信控制器的設(shè)計。
2021-05-28 06:25:21
SDRAM控制器基本操作原理是什么?如何去設(shè)計并實(shí)現(xiàn)一種SDRAM控制器?
2021-06-07 06:01:39
一種基于Internet的智能家庭網(wǎng)絡(luò)控制器的設(shè)計與實(shí)現(xiàn)
2021-06-04 06:39:09
在多軸伺服控制系統(tǒng)中實(shí)現(xiàn)同步精密運(yùn)動
2021-01-27 07:45:40
一種基于S7-200 PLC的位置控制器研究設(shè)計位置控制器在工業(yè)中有什么應(yīng)用?
2021-04-28 06:16:18
的執(zhí)行必須與同一個時鐘同步。第一種同步很好理解,它是網(wǎng)絡(luò)控制器的固有部分。然而,第二種同步到目前為止一直為人所忽視,如今成為運(yùn)動控制性能的瓶頸。
2019-09-11 11:51:12
為解決精密制造對低成本、可移植性強(qiáng)的通用型多軸數(shù)控系統(tǒng)的迫切需求,給出一種基于ARM微處理器S3C2440和專用DSP運(yùn)動控制芯片PCL65045BL組合的嵌入式四軸運(yùn)動控制器。
2021-04-20 06:23:57
的執(zhí)行必須與同一個時鐘同步。第一種同步很好理解,它是網(wǎng)絡(luò)控制器的固有部分。然而,第二種同步到目前為止一直為人所忽視,如今成為運(yùn)動控制性能的瓶頸。
2019-08-07 07:49:57
本文提出了一種不采用在板處理器而以PC機(jī)微處理器為控制核心的開放式四軸運(yùn)動控制器,該運(yùn)動控制器采用ALTERA公司的復(fù)雜可編程門陣列(CPLD)EPF6016實(shí)現(xiàn)硬件管理功能,硬件的功能可以通過軟件配置,而應(yīng)用層的功能如運(yùn)動軌跡規(guī)劃和伺服控制等均由PC機(jī)完成。
2021-04-15 06:09:21
毫米波多通道掃頻遠(yuǎn)場測量系統(tǒng)是一套基于PMAC多軸運(yùn)動控制器的高精度、多功能、自動化的測量設(shè)備。該系統(tǒng)集數(shù)據(jù)分析、圖像處理、系統(tǒng)控制等功能于一體,能方便快捷地完成天線遠(yuǎn)場測量任務(wù),是天線現(xiàn)代化測試技術(shù)的高度集成。
2021-04-09 06:07:25
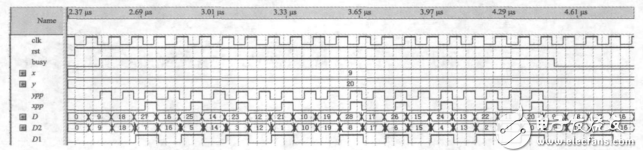
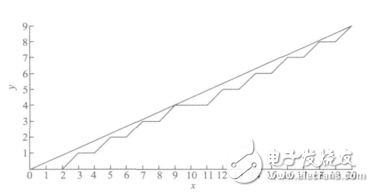
本文采用Verilog FPGA設(shè)計懸掛運(yùn)動控制系統(tǒng)的控制器,通過輸入模塊傳送控制參數(shù),采用HDL語言編程實(shí)現(xiàn)的控制算法,驅(qū)動步進(jìn)電機(jī),對懸掛運(yùn)動物體進(jìn)行精確的控制。
2021-05-06 07:11:03
PID控制器是由哪些部分組成的?怎樣去設(shè)計一種PID控制器呢?
2021-10-11 07:34:58
基于STM32控制器的購物小車是由哪些部分組成的呢?怎樣去設(shè)計一種基于STM32控制器的購物小車呢?
2021-11-12 06:47:51
STM32 BLDC直流電機(jī)控制器由哪些部分組成?怎樣去設(shè)計一種基于STM32的BLDC直流無刷電機(jī)控制器?
2021-09-17 07:03:26
以前看到別人有用過一種集運(yùn)動控制(1到4軸),模擬量采集,IO輸入輸出功能于一體的控制卡。與工控機(jī)之間只有一根網(wǎng)線連接。現(xiàn)在想問問大家有沒有具體的品牌和型號可供參考。謝謝。
2017-09-10 21:39:34
求一份四軸運(yùn)動控制器解決方案,實(shí)現(xiàn)四軸直線、圓弧插補(bǔ),U軸隨動,
2013-08-20 13:28:50
求一種基于FPGA的HDLC協(xié)議控制器設(shè)計方案
2021-04-30 06:53:06
求一種基于FPGA的永磁同步電機(jī)控制器的設(shè)計方案。
2021-05-08 07:02:07
求大佬分享一種基于FPGA的NAND FLASH控制器的設(shè)計方法?
2021-05-08 07:46:27
該控制器以DSP和FPGA為核心器件,針對運(yùn)動控制中的實(shí)時控制、高精度等具體問題,規(guī)劃了DSP的功能擴(kuò)展,并在FPGA上擴(kuò)展了功能相互獨(dú)立的四軸運(yùn)動控制電路。該電路實(shí)現(xiàn)了四路控制信號輸出,四路編碼
2019-06-14 08:30:00
基于FPGA的MCU設(shè)計有兩種基本實(shí)現(xiàn)方式如何實(shí)現(xiàn)微控制器與FPGA的接口設(shè)計
2021-05-06 10:05:17
基于DSP/FPGA的運(yùn)動控制器該如何去設(shè)計?
2021-05-25 06:49:01
的執(zhí)行必須與同一個時鐘同步。第一種同步很好理解,它是網(wǎng)絡(luò)控制器的固有部分。然而,第二種同步到目前為止一直為人所忽視,如今成為運(yùn)動控制性能的瓶頸。本文介紹從網(wǎng)絡(luò)控制器到電機(jī)終端和傳感器全程保持電機(jī)驅(qū)動
2019-03-30 09:38:14
功能簡介高性能多軸運(yùn)動控制器DMC2410是一款基于PCI總線的高性能運(yùn)動控制卡,它可控制多達(dá)四軸步進(jìn)或伺服電機(jī)。與雷賽的DMC1000系列產(chǎn)品相比,他們具有更快的運(yùn)動速度、有更好的直線和圓弧插補(bǔ)
2021-09-01 06:26:12
運(yùn)動控制器有專用的持續(xù)運(yùn)動控制指令,運(yùn)動控制器持續(xù)發(fā)脈沖,控制軸以指定的速度和方向持續(xù)運(yùn)動,持續(xù)運(yùn)動常用的指令為VMOVE,以運(yùn)動速度SPPED持續(xù)運(yùn)動,此時停止軸運(yùn)動使用CANCEL或
2023-02-17 14:03:36
Elmo公司的 Gold Maestro 是先進(jìn)的網(wǎng)絡(luò)多軸運(yùn)動控制器。Gold Maestro 控制任何多軸場景,無論是簡單的點(diǎn)對點(diǎn)運(yùn)動,還是完整的多軸協(xié)調(diào)或同步運(yùn)動。Gold Maestro 依托
2022-01-13 11:49:52
CRT工業(yè)運(yùn)動控制系統(tǒng),其硬件結(jié)構(gòu)基于高性能 DSP 為控制核心、FPGA 協(xié)處理,插補(bǔ)算法、脈沖信號產(chǎn)生及直線曲線加減速控制、I/O 信號的檢測處理。DMC600M系列3~6軸運(yùn)動控制
2022-02-26 16:26:24
本文選用DSP與FPGA作為 運(yùn)動控制器 的核心部件,設(shè)計了通用型運(yùn)動控制器。其中DSP用于運(yùn)動軌跡規(guī)劃、速度控制及位置控制等功能;FPGA完成運(yùn)動控制器的精插補(bǔ)功能,用于精確計算步進(jìn)
2011-09-01 15:08:421499 
設(shè)計了一種基于DSP與FPGA的運(yùn)動控制器。該控制器以DSP為控制核心,用FPGA構(gòu)建運(yùn)動控制器與傳感器以及電機(jī)驅(qū)動器的接口電路。充分發(fā)揮了DSP強(qiáng)大的運(yùn)算能力和FPGA的并行處理能力。具有
2012-10-26 15:21:51 93
93 運(yùn)用低功耗C0rtex-M3微控制器STM32F103VBT6和FPGA芯片設(shè)計一種基于CAN總線的運(yùn)動控制器。介紹系統(tǒng)的體系結(jié)構(gòu)、主要硬件設(shè)計和軟件結(jié)構(gòu)。利用FPGA高速處理能力實(shí)現(xiàn)控制算法,與外界通信采
2013-01-31 14:33:3945 介紹了一種基于fpga的多軸控制器,控制器主要由arm7(LPC2214)和fpga(EP2C5T144C8)及其外圍電路組成,用于同時控制多路電機(jī)的運(yùn)動。利用Verilog HDL硬件描述
2018-06-14 08:24:006000 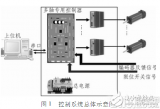
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論