單片機(jī)實(shí)現(xiàn)的步進(jìn)電機(jī)控制系統(tǒng)具有成本低、使用靈活的特點(diǎn),廣泛應(yīng)用于數(shù)控機(jī)床、機(jī)器人,定量進(jìn)給、工業(yè)自動(dòng)控制以及各種可控的有定位要求的機(jī)械工具等應(yīng)用領(lǐng)域。步進(jìn)電機(jī)是數(shù)字控制電機(jī),將脈沖信號(hào)轉(zhuǎn)換成角位移,電機(jī)的轉(zhuǎn)速、停止的位置取決于脈沖信號(hào)的頻
2011-01-19 21:24:16 12823
12823 
,但由于各類單片機(jī)的功能、容量和價(jià)格不同,因而其性能和成本也各不相同。鑒于C504單片機(jī)在電機(jī)控制方面的獨(dú)特結(jié)構(gòu)和大容量、低價(jià)格的特點(diǎn),本文將介紹以C504控制芯片為核心的步進(jìn)電機(jī)控制系統(tǒng),并在滿足性能要求的前提下,實(shí)現(xiàn)了人機(jī)對(duì)話,從而使整個(gè)系統(tǒng)具有較高的性能價(jià)格比。
2020-07-01 08:00:031730 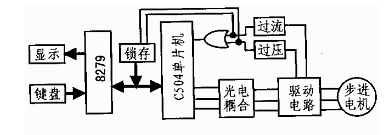
在本教程中,我們將步進(jìn)電機(jī)與PIC微控制器PIC16F877A連接。
2022-11-15 17:25:101015 
我用51單片機(jī)帶動(dòng)步進(jìn)電機(jī)轉(zhuǎn)動(dòng),采用uln2003驅(qū)動(dòng),帶動(dòng)一個(gè)步進(jìn)電機(jī)轉(zhuǎn)動(dòng)時(shí)正常,帶動(dòng)2個(gè)步進(jìn)電機(jī)是就只震動(dòng)不轉(zhuǎn)動(dòng)了,怎么解決呢,程序只是控制一個(gè)步進(jìn)電機(jī)的,另一個(gè)步進(jìn)電機(jī)一連上電源線,有程序
2013-05-04 21:45:06
PIC16F873/PIC16F874/PIC16F876/PIC16F877 中文資料誰(shuí)有啊,共享一看看。。[此貼子已經(jīng)被作者于2008-7-15 13:24:21編輯過(guò)]
2008-06-05 09:32:54
使用PIC16F873A仿制一臺(tái)離合控制器,動(dòng)作基本沒(méi)問(wèn)題了,可是離合的控制波形和客戶機(jī)器比較還有點(diǎn)差異,見(jiàn)下圖說(shuō)明。實(shí)在搞不清楚客戶的離合ON后的大約100ms時(shí)間的下降沿怎么做出來(lái)的,離合輸出
2018-11-27 16:16:22
基于PIC16F877A單片機(jī)軟件環(huán)分的步進(jìn)電機(jī)控制系統(tǒng)產(chǎn)品與應(yīng)用基PICl6F877A單片機(jī)軟件于環(huán) 分的步進(jìn)電機(jī)控制系統(tǒng)田豐果 賀瑩武淑娟(貴州大學(xué)機(jī)械工程與自動(dòng)化學(xué)院,貴陽(yáng) 550003)摘要
2021-09-01 08:39:16
使用單片機(jī)進(jìn)過(guò)驅(qū)動(dòng)器控制步進(jìn)電機(jī),當(dāng)驅(qū)動(dòng)任意兩個(gè)步進(jìn)電機(jī)的時(shí)候,電機(jī)運(yùn)轉(zhuǎn)正常,然而當(dāng)驅(qū)動(dòng)三個(gè)步進(jìn)電機(jī)的時(shí)候,全部震動(dòng)切運(yùn)轉(zhuǎn)速度較慢,
2016-07-15 17:12:43
步進(jìn)電機(jī)控制系統(tǒng)設(shè)計(jì)原理步進(jìn)電機(jī)控制系統(tǒng)硬件電路設(shè)計(jì)步進(jìn)電機(jī)控制系統(tǒng)軟件設(shè)計(jì)步進(jìn)電機(jī)控制系統(tǒng)的檢測(cè)
2021-03-03 07:47:32
各位大神,我現(xiàn)在遇到一個(gè)棘手的問(wèn)題。我需要用單片機(jī)發(fā)送脈沖至步進(jìn)電機(jī)驅(qū)動(dòng)器,驅(qū)動(dòng)器再驅(qū)動(dòng)步進(jìn)電機(jī)運(yùn)轉(zhuǎn)。我用的單片機(jī)是STM32F103ZET6,用這個(gè)芯片產(chǎn)生50%固定占空比的方波信號(hào),也就是脈沖
2016-04-26 16:52:53
單片機(jī)實(shí)現(xiàn)的步進(jìn)電機(jī)控制系統(tǒng)具有成本低、使用靈活的特點(diǎn),廣泛應(yīng)用于數(shù)控機(jī)床、機(jī)器人,定量進(jìn)給、工業(yè)自動(dòng)控制以及各種可控的有定位要求的機(jī)械工具等應(yīng)用領(lǐng)域。步進(jìn)電機(jī)是數(shù)字控制電機(jī),將脈沖信號(hào)轉(zhuǎn)換成角位移
2022-01-25 07:40:23
求問(wèn)各位大神啊,基于單片機(jī)的步進(jìn)電機(jī)細(xì)分驅(qū)動(dòng)控制系統(tǒng)怎么設(shè)計(jì)啊,用什么來(lái)實(shí)現(xiàn)細(xì)分驅(qū)動(dòng)啊,求一個(gè)思路。。
2017-02-05 10:58:32
功能模塊設(shè)計(jì)本模塊可分為如下3個(gè)部分:· 單片機(jī)系統(tǒng):控制步進(jìn)電動(dòng)機(jī);· 外圍電路:PIC單片機(jī)和步進(jìn)電動(dòng)機(jī)的接口電路;· PIC程序:編寫單片機(jī)控制步進(jìn)電功機(jī)的接口程序,實(shí)現(xiàn)三角波信號(hào)的輸出功能
2018-10-16 18:17:33
步進(jìn)電機(jī)調(diào)速控制系統(tǒng)設(shè)計(jì)C語(yǔ)言程序及說(shuō)明.doc步進(jìn)電機(jī)調(diào)速控制系統(tǒng)設(shè)計(jì)C語(yǔ)言程序調(diào)速。實(shí)現(xiàn)控制功能以8051單片機(jī)為控制器,系統(tǒng)設(shè)四個(gè)按鍵“工作/停止按鍵”、“加速按鍵”、“減速按鍵”、“正反向控制按鍵”。系統(tǒng)上電后,按下“正反向控制按鍵”,控制電機(jī)正反轉(zhuǎn);每按一次“加速按鍵”后,步進(jìn)電機(jī)...
2021-07-05 07:05:35
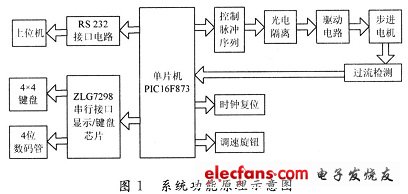
角位移或線位移的開(kāi)環(huán)控制元件。本文應(yīng)用單片機(jī)AT89C51和脈沖分配器PMM8713,步進(jìn)電機(jī)驅(qū)動(dòng)器,光電隔離器4N25等,構(gòu)建了步進(jìn)電機(jī)控制器和驅(qū)動(dòng)器為一體的步進(jìn)電機(jī)控制系統(tǒng)。通過(guò)AT89C51和脈沖分配器PMM8713完成步進(jìn)電機(jī)的各種...
2021-06-29 08:23:15
單片機(jī)實(shí)現(xiàn)的步進(jìn)電機(jī)控制系統(tǒng)具有成本低、使用靈活的特點(diǎn),廣泛應(yīng)用于數(shù)控機(jī)床、機(jī)器人,定量進(jìn)給、工業(yè)自動(dòng)控制以及各種可控的有定位要求的機(jī)械工具等應(yīng)用領(lǐng)域。步進(jìn)電機(jī)是數(shù)字控制電機(jī),將脈沖信號(hào)轉(zhuǎn)換成角位移
2021-04-01 16:47:56
` 本帖最后由 松山歸人 于 2021-4-8 16:06 編輯
大家下午好!繼續(xù)接著我們上期沒(méi)講完的內(nèi)容,今天我們繼續(xù)往下。上期回顧:基于單片機(jī)的步進(jìn)電機(jī)控制系統(tǒng)設(shè)計(jì)3 系統(tǒng)軟件設(shè)計(jì)3.1
2021-04-08 16:01:40
單片機(jī)的迅速發(fā)展和普及,為設(shè)計(jì)功能強(qiáng)、價(jià)格低的步進(jìn)電機(jī)控制系統(tǒng)提供了先進(jìn)的技術(shù)和充足的資源。本文主要介紹一種基于微機(jī)和單片機(jī)的步進(jìn)電機(jī)控制系統(tǒng),可以簡(jiǎn)便地控制步進(jìn)電機(jī)運(yùn)行。
2011-03-04 14:37:24
目前我們公司老產(chǎn)品使用的兩款PIC的單片機(jī)分別是PIC16F873A和PIC16F877A,硬件做了兼容,也就是 說(shuō)引腳實(shí)現(xiàn)一一對(duì)應(yīng),程序是匯編程序,程序的頭文件改為16F877A,為什么程序下載后執(zhí)行的不對(duì) ,按照常理應(yīng)該是一樣的 這是怎么回事?請(qǐng)大神給予指導(dǎo),謝謝!
2021-09-06 16:51:35
基于PIC16F887的智能電話控制系統(tǒng)設(shè)計(jì)系統(tǒng)設(shè)計(jì)實(shí)現(xiàn)功能proteus仿真圖軟件設(shè)計(jì)具體應(yīng)用說(shuō)明系統(tǒng)設(shè)計(jì)此次設(shè)計(jì)的電話系統(tǒng)以PIC16F887單片機(jī)為核心,用C語(yǔ)言編寫。利用單片機(jī)外接的矩陣鍵盤
2021-11-25 09:07:06
基于C++Builder下環(huán)狀閥片位移檢測(cè)系統(tǒng)的設(shè)計(jì)基于單片機(jī)的步進(jìn)電機(jī)控制系統(tǒng)前 言步進(jìn)電機(jī)是一種進(jìn)行精確步進(jìn)運(yùn)動(dòng)的機(jī)電執(zhí)行元件,它廣泛應(yīng)用于工業(yè)機(jī)械的數(shù)字控制,為使系統(tǒng)的可靠性、通用性、可維護(hù)性
2021-06-29 09:51:59
基于單片機(jī)的步進(jìn)電機(jī)開(kāi)環(huán)控制系統(tǒng)
2012-08-08 00:18:34
基于單片機(jī)的步進(jìn)電機(jī)開(kāi)環(huán)控制系統(tǒng)摘要: 通過(guò)ATMEL89C51單片機(jī)對(duì)步進(jìn)電機(jī)進(jìn)行控制,主要介紹了步進(jìn)電機(jī)控制器、驅(qū)動(dòng)電路和LED顯示電路的設(shè)計(jì),實(shí)現(xiàn)了步進(jìn)電機(jī)的開(kāi)環(huán)控制。在步進(jìn)電機(jī)控制器的設(shè)計(jì)中
2009-08-26 15:03:12
基于單片機(jī)的步進(jìn)電機(jī)開(kāi)環(huán)控制系統(tǒng).pdf
2018-07-19 00:28:25
基于單片機(jī)的步進(jìn)電機(jī)開(kāi)環(huán)控制系統(tǒng)通過(guò)ATMEL89C51單片機(jī)對(duì)步進(jìn)電機(jī)進(jìn)行控制,主要介紹了步進(jìn)電機(jī)控制器、驅(qū)動(dòng)電路和LED顯示電路的設(shè)計(jì),實(shí)現(xiàn)了步進(jìn)電機(jī)的開(kāi)環(huán)控制。在步進(jìn)電機(jī)控制器的設(shè)計(jì)中,重點(diǎn)
2010-12-01 09:40:17
`本文將以89C51單片機(jī)、LabVIEW和槽式光耦及直流電機(jī)為主要器件制作測(cè)控電路。直流電機(jī)作為研究對(duì)象,本次設(shè)計(jì)的下位機(jī)控制器將選用89C51單片機(jī),上位機(jī)就利用LabVIEW軟件,以此來(lái)搭建一個(gè)監(jiān)控性的平臺(tái)。繼而設(shè)計(jì)一種基于LabVIEW與單片機(jī)的直流電動(dòng)機(jī)的控制系統(tǒng)。`
2021-06-24 07:35:28
基于Stm32f103的位移測(cè)量及控制系統(tǒng)設(shè)計(jì)系統(tǒng)框架本設(shè)計(jì)采用單片機(jī)控制步進(jìn)電機(jī)實(shí)現(xiàn)位移的精準(zhǔn)控制,用位移傳感器實(shí)時(shí)采集位移數(shù)據(jù),用PID的控制算法,與步進(jìn)電機(jī)的控制形成一套閉環(huán)的控制系統(tǒng)。重點(diǎn)
2021-08-23 08:25:42
和通信模塊組成。其中,控制模塊由ATmegal28L單片機(jī)最小系統(tǒng)l、鍵盤輸入電路、液晶顯示電路和步進(jìn)電機(jī)驅(qū)動(dòng)電路組成;檢測(cè)模塊由ATmegal28L單片機(jī)最小系統(tǒng)2、紅外線反射電路和微步進(jìn)電機(jī)驅(qū)動(dòng)
2011-08-19 09:50:42
使用單片機(jī)控制步進(jìn)電機(jī)(C語(yǔ)言源代碼已經(jīng)在自己板子上燒寫過(guò))題 目:單片機(jī)控制步進(jìn)電機(jī)系統(tǒng)摘 要很多工業(yè)控制設(shè)備對(duì)位移和角度的控制精度要求較高, 一般電機(jī)很難實(shí)現(xiàn), 而步進(jìn)電機(jī)可精確實(shí)現(xiàn)所設(shè)定的角度
2021-07-06 06:00:26
相關(guān)內(nèi)容。硬件清單:1、單片機(jī)最小系統(tǒng)(本案例使用Atmega16芯片)2、步進(jìn)電機(jī)(二相四線)3、穩(wěn)壓電源(24V)4、步進(jìn)電機(jī)驅(qū)動(dòng)器(TB6600)整體連接圖:原理圖:控制原...
2021-07-07 06:18:46
基于C++Builder下環(huán)狀閥片位移檢測(cè)系統(tǒng)的設(shè)計(jì)基于單片機(jī)的步進(jìn)電機(jī)控制系統(tǒng)前 言步進(jìn)電機(jī)是一種進(jìn)行精確步進(jìn)運(yùn)動(dòng)的機(jī)電執(zhí)行元件,它廣泛應(yīng)用于工業(yè)機(jī)械的數(shù)字控制,為使系統(tǒng)的可靠性、通用性、可維護(hù)性
2021-07-06 06:41:14
如何采用PIC16C621A單片機(jī)和線圈實(shí)現(xiàn)八細(xì)分步進(jìn)電機(jī)驅(qū)動(dòng)器的設(shè)計(jì)?
2021-06-15 06:05:22
怎么實(shí)現(xiàn)基于51單片機(jī)的步進(jìn)電機(jī)控制系統(tǒng)的設(shè)計(jì)?
2021-10-19 08:01:35
基于51單片機(jī)的步進(jìn)電機(jī)控制系統(tǒng)proteus原理圖需要元器件#硬件原理圖proteus原理圖##附上源代碼通過(guò)STC89C52芯片的四個(gè)外部引腳就可以實(shí)現(xiàn)驅(qū)動(dòng)步進(jìn)電機(jī)。#include
2021-07-08 09:04:57
步進(jìn)電機(jī)是什么?步進(jìn)電機(jī)有哪些應(yīng)用?怎樣去設(shè)計(jì)一種基于單片機(jī)的步進(jìn)電機(jī)控制系統(tǒng)?怎樣去設(shè)計(jì)一種基于C++Builder下環(huán)狀閥片位移檢測(cè)系統(tǒng)?
2021-07-06 06:25:55
我想做一個(gè)用pic單片機(jī)控制步進(jìn)電機(jī)的系統(tǒng),打算直接買現(xiàn)成的步進(jìn)電機(jī)驅(qū)動(dòng)器和步進(jìn)電機(jī),那請(qǐng)問(wèn)各位,使用時(shí)在pic單片機(jī)和步進(jìn)電機(jī)驅(qū)動(dòng)器之間,還需要加什么元器件嗎?還是直接將單片機(jī)的I/O口和驅(qū)動(dòng)器
2013-11-21 14:31:17
該系統(tǒng)是基于SLH89F5162單片機(jī)控制的智能窗系統(tǒng),能根據(jù)外界的天氣情況和室外的氣體情況來(lái)控制著窗戶的開(kāi)啟和關(guān)閉。具體工作原理是以單片機(jī)為其核心控制芯片,根據(jù)溫濕度傳感器,煙霧傳感器將周圍環(huán)境
2013-11-16 21:43:27
請(qǐng)問(wèn)PIC單片機(jī)如何控制步進(jìn)電機(jī)的正轉(zhuǎn)與反轉(zhuǎn)?
2021-10-15 09:39:39
我想做一個(gè)用STC52單片機(jī)控制步進(jìn)電機(jī)的系統(tǒng),打算直接買現(xiàn)成的步進(jìn)電機(jī)驅(qū)動(dòng)器和步進(jìn)電機(jī),那請(qǐng)問(wèn)各位,使用時(shí)在STC52單片機(jī)機(jī)和步進(jìn)電機(jī)驅(qū)動(dòng)器之間,還需要加什么元器件嗎?還是直接將單片機(jī)的I/O口和驅(qū)動(dòng)器相連就可以了?
2014-07-28 12:27:19
PIC16F873 Data Sheet28/40-Pin 8-Bit CMOS FLASHMicrocontrollers
he Microchip name, logo, PIC
2008-06-05 14:07:37 2
2 pic16f873中文資料
2008-06-05 14:31:06623 PIC16F873A
2008-12-26 15:24:58202 介紹了一種基于單片機(jī)和微機(jī)的步進(jìn)電機(jī)控制系統(tǒng)。
2009-04-02 12:12:4317 本文應(yīng)用單片機(jī)、步進(jìn)電機(jī)驅(qū)動(dòng)芯片、字符型LCD 和鍵盤陣列, 構(gòu)建了集步進(jìn)電機(jī)控制器和驅(qū)動(dòng)器為一體的步進(jìn)電機(jī)控制系統(tǒng)。二維工作臺(tái)作為被控對(duì)象通過(guò)步進(jìn)電機(jī)驅(qū)動(dòng)滾珠絲桿在X/
2009-04-06 17:12:3141 用基于VB6的PC機(jī)通過(guò)RS485總線與多達(dá)16臺(tái)PIC16F873單片機(jī)進(jìn)行通信,每臺(tái)PIC16F873通過(guò)I2C總線又分別掛接8臺(tái)PIC16F874,其中每臺(tái)PIC16F874負(fù)責(zé)16個(gè)鋰電池的充放電控制,從而實(shí)現(xiàn)利用單臺(tái)PC
2009-07-31 08:19:0146 電波鐘是新興的準(zhǔn)確計(jì)時(shí)產(chǎn)品,是把原子振動(dòng)的頻率引出來(lái)作為計(jì)時(shí)基準(zhǔn).設(shè)計(jì)以PIC16F873 單片機(jī)為核心,由接收單元,中央處理顯示單元和電源單元三個(gè)主要部分構(gòu)成,用于接收
2009-08-13 09:20:1179 基于單片機(jī)的步進(jìn)電機(jī)開(kāi)環(huán)控制系統(tǒng):通過(guò)ATMEL89C51單片機(jī)對(duì)步進(jìn)電機(jī)進(jìn)行控制,主要介紹了步進(jìn)電機(jī)控制器、驅(qū)動(dòng)電路和LED顯示電路的設(shè)計(jì),實(shí)現(xiàn)了步進(jìn)電機(jī)的開(kāi)環(huán)控制。在步進(jìn)電機(jī)
2009-08-25 18:27:01102 本文應(yīng)用單片機(jī)、步進(jìn)電機(jī)驅(qū)動(dòng)芯片、字符型LCD和鍵盤陣列,構(gòu)建了集步進(jìn)電機(jī)控制器和驅(qū)動(dòng)器為一體的步進(jìn)電機(jī)控制系統(tǒng)。二維工作臺(tái)作為被控對(duì)象通過(guò)步進(jìn)電機(jī)驅(qū)動(dòng)滾珠絲桿
2009-09-10 09:19:3033 本設(shè)計(jì)采用凌陽(yáng)16 位單片機(jī)SPCE061A對(duì)步進(jìn)電機(jī)進(jìn)行控制,通過(guò)IO口輸出的具有時(shí)序的方波作為步進(jìn)電機(jī)的控制信號(hào),信號(hào)經(jīng)過(guò)芯片L298N驅(qū)動(dòng)步進(jìn)電機(jī);同時(shí),用4X4的鍵盤來(lái)對(duì)電機(jī)的狀
2010-01-09 10:25:45160 設(shè)計(jì)了一種利用凌陽(yáng)SPCE061A單片機(jī)和微機(jī)控制步進(jìn)電機(jī)的控制系統(tǒng), 采用上、下位機(jī)控制步進(jìn)電機(jī)的多種運(yùn)行方式。程序采用模塊化設(shè)計(jì), 通過(guò)PC機(jī)容易實(shí)現(xiàn)各功能設(shè)置。系統(tǒng)實(shí)現(xiàn)
2010-01-11 16:31:0348 基于AT89C52單片機(jī)的步進(jìn)電機(jī)控制系統(tǒng)設(shè)計(jì)
摘 要: 提出了一個(gè)由AT89C52單片機(jī)控制
2010-04-20 09:31:08418 摘要:介紹了一種基于微機(jī)和單片機(jī)的步進(jìn)電機(jī)控制系統(tǒng),利用上、下位機(jī)控制步進(jìn)電機(jī)的多種運(yùn)行方式,可實(shí)現(xiàn)步進(jìn)電機(jī)正反轉(zhuǎn)控制以及步進(jìn)電機(jī)的無(wú)級(jí)調(diào)速。程序采用模塊化設(shè)計(jì),通
2010-07-22 21:16:4176 摘要:介紹了由PIC16F876控制的步進(jìn)電機(jī)細(xì)分驅(qū)動(dòng)電路的設(shè)計(jì),該電路主要包括單片機(jī)控制電路、斬波電路、功率驅(qū)動(dòng)電路及溫度報(bào)警與限流電路等。給出了細(xì)分驅(qū)動(dòng)電路的設(shè)計(jì)原理
2010-07-23 21:57:57146 任務(wù):設(shè)計(jì)并制作一個(gè)基于單片機(jī)高速高精度步進(jìn)電機(jī)控制系統(tǒng)。目標(biāo):1)完成單片機(jī)控制系統(tǒng)的控制電路、高速、高精度步進(jìn)電機(jī)驅(qū)動(dòng)電路的設(shè)計(jì),提供相應(yīng)的電路原理圖
2010-08-08 17:29:27166 提出一種基于凌陽(yáng)單片機(jī)的步進(jìn)電機(jī)加減速的控制方法。采用凌陽(yáng)科技推出的16位結(jié)構(gòu)工控單片機(jī)SPMC75F2413A為控制器,由Allegro公司生產(chǎn)的兩相步進(jìn)電機(jī)專用驅(qū)動(dòng)器件SLA7042M構(gòu)成步進(jìn)電
2011-01-05 10:54:48169
pic16f873引腳圖
2008-06-05 14:46:076032 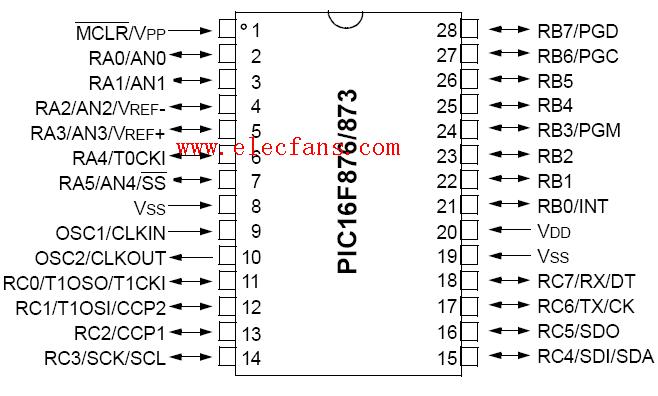
單片機(jī)控制步進(jìn)電機(jī)的原理
本資料詳細(xì)介紹鄧步進(jìn)電機(jī)的工作原理以及單片機(jī)控制步進(jìn)電機(jī)的特點(diǎn)。步進(jìn)電機(jī)是數(shù)字控制電機(jī),它將脈沖信號(hào)轉(zhuǎn)
2009-03-30 11:13:2484434 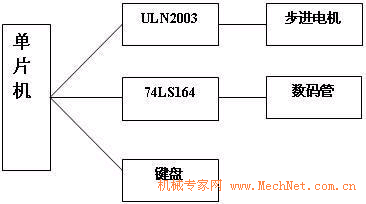
單片機(jī)控制步進(jìn)電機(jī)驅(qū)動(dòng)器原理
步進(jìn)電機(jī)在控制系統(tǒng)中具有廣泛的應(yīng)用。它可以把脈沖信號(hào)轉(zhuǎn)換成角位移,并且可用作電磁制動(dòng)輪、電磁差分器、
2009-09-17 14:58:487612 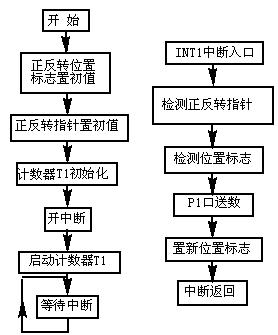
單片機(jī)的步進(jìn)電機(jī)開(kāi)環(huán)控制系統(tǒng)
0 概述
步進(jìn)電機(jī)是一種將電脈沖信號(hào)變換成相應(yīng)的角位移或直線位移的機(jī)電執(zhí)行元件。控制步進(jìn)電機(jī)的輸入
2010-04-12 11:59:381658 
There are four devices (PIC16F873, PIC16F874,PIC16F876 and PIC16F877) covered by this data sheet.
2011-12-29 16:38:2372 步進(jìn)電機(jī)是一種感應(yīng)電機(jī),廣泛應(yīng)用在各種自動(dòng)化控制系統(tǒng)中。電子發(fā)燒友網(wǎng)整理了步進(jìn)電機(jī)控制系統(tǒng)的一些控制原理及步進(jìn)電機(jī)驅(qū)動(dòng)電路圖、步進(jìn)電機(jī)控制驅(qū)動(dòng)程序等知識(shí),較為翔實(shí)的介紹了步進(jìn)電機(jī)控制系統(tǒng)。
2012-06-18 16:52:56

步進(jìn)電機(jī)控制系統(tǒng) 步進(jìn)電機(jī)控制系統(tǒng) 步進(jìn)電機(jī)控制系統(tǒng)
2015-11-02 18:07:0154 基于單片機(jī)的步進(jìn)電機(jī)控制系統(tǒng)的研究....
2016-01-04 15:25:3923 單片機(jī)的步進(jìn)電機(jī)控制系統(tǒng)研究,下來(lái)看看,
2016-04-25 10:10:0719 基于單片機(jī)的步進(jìn)電機(jī)開(kāi)環(huán)控制系統(tǒng),下來(lái)看看
2016-04-25 17:07:5312 單片機(jī)的步進(jìn)電機(jī)控制系統(tǒng),采用的是C語(yǔ)言。
2016-04-28 10:46:3422 基于單片機(jī)的步進(jìn)電機(jī)控制應(yīng)用,有需要的下來(lái)看看
2016-05-03 13:52:5944 基于單片機(jī)的步進(jìn)電機(jī)控制系統(tǒng),有需要的下來(lái)看看
2016-05-03 13:52:5946 基于ATmega16單片機(jī)的步進(jìn)電機(jī)加減速控制
2016-05-03 13:52:5916 介紹了基于MSP430F149單片機(jī)的步進(jìn)電機(jī)控制系統(tǒng)的設(shè)計(jì)。在硬件部分 描述了該系統(tǒng)的硬件配置和工作原理; 在軟件部分分析了單片機(jī)控制程序和步進(jìn)電機(jī)運(yùn)動(dòng)的設(shè)計(jì)過(guò)程。該系統(tǒng)具有研制成本低且擴(kuò)展好的特點(diǎn)并具有軟件功能強(qiáng)、操作使用簡(jiǎn)便等優(yōu)點(diǎn)。
2016-05-06 14:12:232 基于單片機(jī)的步進(jìn)電機(jī)控制系統(tǒng)。
2016-05-25 14:03:3938 步進(jìn)電機(jī)課程設(shè)計(jì)------步進(jìn)電機(jī)控制系統(tǒng)設(shè)計(jì)報(bào)告
2016-06-17 14:59:5311 基于單片機(jī)的步進(jìn)電機(jī)開(kāi)環(huán)控制系統(tǒng)基于單片機(jī)的步進(jìn)電機(jī)開(kāi)環(huán)控制系統(tǒng)
2021-11-30 11:55:5827 兩個(gè)步進(jìn)電機(jī)控制系統(tǒng)分別采用 AT89C51 和AT89C2051 單片機(jī)。其中 :AT89C51 單片機(jī)程序完成與飛控計(jì)算機(jī)數(shù)據(jù)交換、處理和計(jì)算像移補(bǔ)償速度、兩幅相片的間隔時(shí)間、卷片步進(jìn)電機(jī)的控制
2017-08-31 17:45:4913 單片機(jī)實(shí)現(xiàn)的步進(jìn)電機(jī)控制系統(tǒng)具有成本低、使用靈活的特點(diǎn),廣泛應(yīng)用于數(shù)控機(jī)床、機(jī)器人,定量進(jìn)給、工業(yè)自動(dòng)控制以及各種可控的有定位要求的機(jī)械工具等應(yīng)用領(lǐng)域。
2017-11-03 09:37:3842252 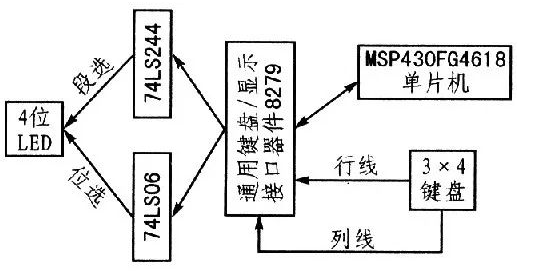
摘 要 本文的主要工作是基于STM32步進(jìn)電機(jī)控制系統(tǒng)的設(shè)計(jì)。隨著越來(lái)越多的高科技產(chǎn)品逐漸融入了日常生活中,步進(jìn)電機(jī)控制系統(tǒng)發(fā)生了巨大的變化。單片機(jī)、C語(yǔ)言等前沿學(xué)科的技術(shù)的日趨成熟與實(shí)用化,使得
2017-11-27 18:49:3690 單片機(jī)實(shí)現(xiàn)的步進(jìn)電機(jī)控制系統(tǒng)具有成本低、使用靈活的特點(diǎn),廣泛應(yīng)用于數(shù)控機(jī)床、機(jī)器人,定量進(jìn)給、工業(yè)自動(dòng)控制以及各種可控的有定位要求的機(jī)械工具等應(yīng)用領(lǐng)域。步進(jìn)電機(jī)是數(shù)字控制電機(jī),將脈沖信號(hào)轉(zhuǎn)換成角位移
2017-12-04 13:45:3813 特點(diǎn),由計(jì)算機(jī)與單片機(jī)組成的步進(jìn)電機(jī)控制系統(tǒng)能兼顧兩者優(yōu)點(diǎn),在T業(yè)生產(chǎn)中具有良好的推廣價(jià)值。有些情況下,步進(jìn)電機(jī)需T作在較惡劣的環(huán)境條件中,或步進(jìn)電機(jī)需實(shí)現(xiàn)較遠(yuǎn)距離控制,則可通過(guò)數(shù)據(jù)的無(wú)線傳輸來(lái)實(shí)現(xiàn)步進(jìn)電機(jī)的
2018-02-05 17:02:297 便攜式磁記憶檢測(cè)儀以單片機(jī)PIC16LF873A為核心,用HMC1052兩軸磁阻傳感器檢測(cè)法向分量Hp(y)的X分量和Y分量,經(jīng)過(guò)信號(hào)放大后,送單片機(jī)PIC16LF873A的A/D轉(zhuǎn)換通道,獲得
2018-11-28 07:50:503419 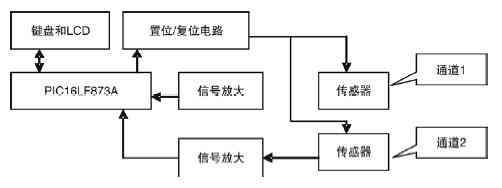
1 系統(tǒng)設(shè)計(jì)原理 步進(jìn)電機(jī)控制系統(tǒng)主要由單片機(jī)、鍵盤LED、驅(qū)動(dòng)/放大和PC上位機(jī)等4個(gè)模塊組成,其中PC機(jī)模塊是軟件控制部分。為保護(hù)單片機(jī)控制系統(tǒng)硬件電路,在單片機(jī)和步進(jìn)電機(jī)之間增加過(guò)流保護(hù)電路
2018-10-18 16:26:018285 
pIC16f874步進(jìn)電機(jī)程序
listp=16f874
include
;--==*[CONSTANTS]*==--
#defineCOMMAND_2
2018-12-05 15:34:231987 步進(jìn)電機(jī)控制系統(tǒng)主要由單片機(jī)、鍵盤LED、驅(qū)動(dòng)/放大和PC上位機(jī)等4個(gè)模塊組成,其中PC機(jī)模塊是軟件控制部分,該控制系統(tǒng)可實(shí)現(xiàn)的功能:1)通過(guò)鍵盤啟動(dòng)/暫停步進(jìn)電機(jī)、設(shè)置步進(jìn)電機(jī)的轉(zhuǎn)速和改變步進(jìn)電機(jī)
2019-03-27 14:37:023944 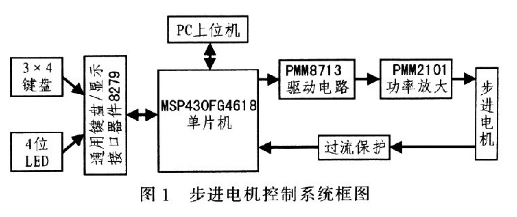
結(jié)合 51 單片機(jī)的特點(diǎn),研究設(shè)計(jì)步進(jìn)電機(jī)的控制系統(tǒng),以 51 單片機(jī) AT89S52 為控制核心,選用 ULN2003A 芯片組成的驅(qū)動(dòng)電路,提出一種步進(jìn)電動(dòng)機(jī)控制系統(tǒng)設(shè)計(jì)方案。完成控制系統(tǒng)的硬件電路設(shè)計(jì)和軟件編程,實(shí)現(xiàn)步進(jìn)電機(jī)的控制要求。該系統(tǒng)簡(jiǎn)便易操作、控制精度高,具有較高的使用價(jià)值。
2019-05-10 08:00:0016 控制系統(tǒng)的硬件組成 控制系統(tǒng)的硬件組成電路由SM8954A單片機(jī)、可編程并行接口8255、地址鎖存器74ALS373、AT93C46 EEPROM、步進(jìn)電機(jī)和電磁閥、液晶模塊顯示電路和鍵盤等組成。步進(jìn)電機(jī)通過(guò)外圍接口芯片8255A與單片機(jī)連接。 該控制系統(tǒng)選用的是SM8954A單片機(jī)。
2019-07-25 16:24:35810 
本文以利用PIC16F628單片機(jī)構(gòu)成PVS控制系統(tǒng)為例,從硬件系統(tǒng)設(shè)計(jì)和軟件系統(tǒng)設(shè)計(jì)入手,給出了印制電路板圖、電路原理圖及源代碼。
2019-10-21 16:23:261122 本文檔的主要內(nèi)容詳細(xì)介紹的是PIC16F873的聲音仿真電路資料合集免費(fèi)下載.
2020-06-03 16:28:309 基于89c51單片機(jī)的步進(jìn)電機(jī)控制系統(tǒng)
2021-08-31 10:10:4664 機(jī)等相關(guān)內(nèi)容。硬件清單:1、單片機(jī)最小系統(tǒng)(本案例使用Atmega16芯片)2、步進(jìn)電機(jī)(二相四線)3、穩(wěn)壓電源(24V)4、步進(jìn)電機(jī)驅(qū)動(dòng)器(TB6600)整體連接圖:原理圖:控制原...
2021-11-08 10:50:5940 1 系統(tǒng)設(shè)計(jì)原理
步進(jìn)電機(jī)控制系統(tǒng)主要由單片機(jī)、鍵盤LED、驅(qū)動(dòng)/放大和PC上位機(jī)等4個(gè)模塊組成,其中PC機(jī)模塊是軟件控制部分。為保護(hù)單片機(jī)控制系統(tǒng)硬件電路,在單片機(jī)和步進(jìn)電機(jī)之間增加過(guò)流保護(hù)電路
2022-02-11 14:55:5352 電機(jī)控制系統(tǒng), 根據(jù)輸出信號(hào)的不同可以控制步進(jìn)電機(jī)的轉(zhuǎn)動(dòng)狀態(tài),其中采用了28BYJ-48的步進(jìn)電機(jī),以ULN2003為驅(qū)動(dòng)
芯片,并通過(guò)單片機(jī)程序控制和處理, 從而實(shí)現(xiàn)了步進(jìn)電機(jī)的狀態(tài)控制及相應(yīng)狀態(tài)顯示。
本系統(tǒng)采用STC89C52單片機(jī)為核心處理器,遙控器為命令輸入模
2023-03-21 14:52:170 電子發(fā)燒友網(wǎng)站提供《基于PIC單片機(jī)的起爆控制系統(tǒng).pdf》資料免費(fèi)下載
2023-10-30 09:39:230 該項(xiàng)目利用51單片機(jī)實(shí)現(xiàn)了一個(gè)步進(jìn)電機(jī)控制系統(tǒng),可以實(shí)現(xiàn)步進(jìn)電機(jī)的正反轉(zhuǎn)、加減速、啟動(dòng)和停止,并通過(guò)LCD顯示電機(jī)的工作狀態(tài)。通過(guò)該系統(tǒng),你可以控制步進(jìn)電機(jī)啟動(dòng)、旋轉(zhuǎn)的方向和速度。
2023-12-06 16:39:22968 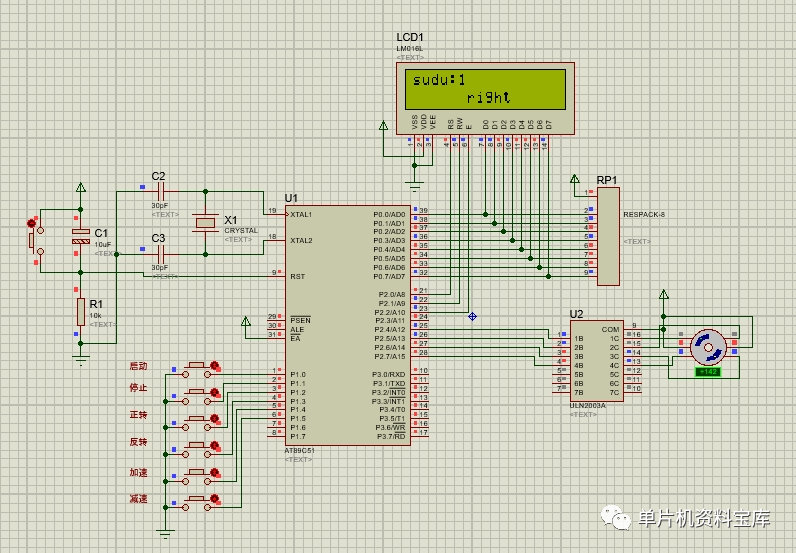
:本文應(yīng)用單片機(jī)、步進(jìn)電機(jī)驅(qū)動(dòng)芯片、字符型 LCD 和鍵盤陣列 構(gòu)建了集步進(jìn)電機(jī)控制器和驅(qū)動(dòng)器為一體的步進(jìn)電機(jī)控制系統(tǒng)。二維工作臺(tái)作為被控對(duì)象通過(guò)步進(jìn)電機(jī)驅(qū)動(dòng)滾珠絲桿在 X/Y 軸方向聯(lián)動(dòng)。文中討論
2023-12-18 09:24:241
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論