智能模型車底盤技術(shù)
摘要:本文針對智能車比賽用模型車底盤,從汽車?yán)碚摰慕嵌葘D(zhuǎn)向輪定位參數(shù)、車輛的重心選擇、側(cè)滑等原理進(jìn)行了介紹,并通過對轉(zhuǎn)向輪定位參
2010-04-20 15:16:13 830
830 
本文設(shè)計(jì)方案以MSP430單片機(jī)為系統(tǒng)的控制核心,采用反射式光電傳感器模塊尋跡,實(shí)現(xiàn)智能小車的自動尋跡行駛。在實(shí)驗(yàn)中采用與白色相差很大的黑色引導(dǎo)線作為智能小車的既定路線,系統(tǒng)驅(qū)動采用控制方式為PWM 的直流電機(jī)。
2013-09-30 10:05:3012517 
請問智能尋跡車如何在黑線分叉口區(qū)分方向
2020-10-27 08:23:26
智能尋跡小車所有的資料哦
2012-12-09 16:51:01
大連理工大學(xué)“飛馳”隊(duì)進(jìn)行了智能模型車系統(tǒng)開發(fā)與研究工作,主要工作包括車體改裝、系統(tǒng)硬件及軟件設(shè)計(jì)和控制算法研究等。內(nèi)容安排如下:本章為引言,介紹了智能汽車的發(fā)展?fàn)顩r主要技術(shù);第二章闡述了模型車
2011-07-25 19:20:35
智能化自尋跡程控車模
2013-04-14 01:01:43
智能家居控制系統(tǒng)模型 智能家居控制系統(tǒng)(smarthome controlsystems,簡稱SCS),是以住宅為平臺,家居電器及家電設(shè)備為主要控制對象,利用綜合布線技術(shù)、網(wǎng)絡(luò)通信
2013-10-28 21:21:45
智能小車3路尋跡算法分析
2011-07-11 09:31:14
本帖最后由 eehome 于 2013-1-5 09:53 編輯
設(shè)計(jì)主要以簡易智能機(jī)器人為開發(fā)平臺,選擇通用、價(jià)廉的STC89C51單片機(jī)為控制平臺,選擇常見的電機(jī)模型車為機(jī)械平臺,通過
2012-03-09 10:55:51
智能駕駛實(shí)車測試系統(tǒng)-VDAS
2020-12-30 07:35:54
簡易智能車元件,制作及開源代碼,謝謝!那
2016-04-07 18:00:18
智能車系統(tǒng)解決方案總體設(shè)計(jì)本設(shè)計(jì)方案獻(xiàn)給所有與我一樣獨(dú)自奮戰(zhàn)的車友們,愿你們少走彎路。本四旋翼方案可能是最簡單的可行方案,主要是根據(jù)發(fā)光源的大小來區(qū)分前后車燈與信標(biāo)。旨在起到拋磚引玉的作用,也希望
2018-10-24 19:17:51
1、智能車目標(biāo)識別系統(tǒng)的實(shí)現(xiàn) 首先,簡單介紹一下上面提到的各個(gè)話題的范圍 (Domain),人工智能 (Artifitial Intelligence)是最大的話題,如果用一張圖來說明的話
2022-09-06 14:54:26
-第六章、模型車的主要技術(shù)參數(shù)說明... - 27 -6.1 智能車外形參數(shù)... - 27 -6.2 電路部分參數(shù)... - 27 -6.3 除了車模原有的驅(qū)動電機(jī)、舵機(jī)之外伺服電機(jī)數(shù)量... - 27
2013-05-07 23:40:08
潤和滿天星系列Pegasus智能小車開發(fā)套件,基于海思Hi3861V100芯片,支持OpenHarmony輕量系統(tǒng),實(shí)現(xiàn)巡線、避障功能通過尋跡模塊獲取路面軌道數(shù)據(jù),運(yùn)用尋跡算法使得智能小車可以按照固定軌道運(yùn)行
2023-03-28 13:07:10
`基于STM32的智能尋跡探險(xiǎn)車開發(fā)原因:現(xiàn)在大學(xué)生電子設(shè)計(jì)大賽的題目技術(shù)含量越來越高,對于控制類的題目由以前的51單片機(jī)開發(fā)到現(xiàn)在的FPGA開發(fā)等,越來越有挑戰(zhàn)性,再加上在6月份我要參加中國機(jī)器人
2015-05-25 13:38:38
效的安全保障。此次的智能視頻探障系統(tǒng)基于深聯(lián)華"安芯一號"穩(wěn)定可靠的性能保證和高速的運(yùn)算能力。將視頻探障系統(tǒng),搭載在模型車上。實(shí)現(xiàn)對于小車,手機(jī)和電腦端無線控制、無線
2014-01-11 10:57:49
目錄第4篇實(shí)戰(zhàn)案例篇第16章 智能車控制系統(tǒng) 該書叫什么名字
2015-04-25 15:15:52
`遙控自動尋跡車電路。不用單片機(jī)。呵呵。`
2012-09-23 19:28:38
公司項(xiàng)目原先使用μCOS-II,但是μCOS存在商業(yè)使用付費(fèi)問題,故而我們轉(zhuǎn)向用國產(chǎn)開源免費(fèi)RTOS RT-Thread替代,花了一天半的時(shí)間將原來的μCOS代碼移植到了RT-Thread上面。下面
2020-06-04 04:35:27
使用μCOS-Ⅱ操作系統(tǒng)的短信電話機(jī)
2013-04-22 13:05:29
本文是根據(jù)第三屆全國大學(xué)生“飛思卡爾”杯智能汽車大賽要求設(shè)計(jì)自主識別道路的智能車。整個(gè)系統(tǒng)采用了組委會提供的16位單片機(jī)mc9s12dg128為核心,模型車本身帶有差速器和后輪驅(qū)動,需要設(shè)計(jì)完成基于單片機(jī)的自動控制系統(tǒng)使得模型車在封閉的跑道上自主循線運(yùn)行。
2020-08-05 06:28:21
本文從汽車?yán)碚摰慕嵌葘D(zhuǎn)向輪定位、車輛的重心選擇、側(cè)滑等原理加以介紹,并針對比賽用模型車底盤進(jìn)行了一系列測試,包括轉(zhuǎn)向輪定位參數(shù)的選擇、舵機(jī)性能測試以及模型車轉(zhuǎn)向穩(wěn)態(tài)測試,得出了這些調(diào)整參數(shù)之間
2021-05-18 06:11:22
智能車系統(tǒng)以—個(gè)標(biāo)準(zhǔn)的汽車模型作為載體,要求實(shí)現(xiàn)在白色場地上,通過轉(zhuǎn)向和車速的控制 ,使其自動地沿著一條任意給定的黑色帶狀引導(dǎo)線行駛,在保證穩(wěn)定性的前提下以最短的時(shí)間完成 自動尋跡。在該智能車系統(tǒng)中
2023-09-19 08:03:50
車路協(xié)同與智能協(xié)同群體智能和協(xié)同控制該怎樣實(shí)現(xiàn)
2020-12-30 07:51:36
小車走翹翹板摘 要本次設(shè)計(jì)的簡易智能電動車采用簡單的人工智能技術(shù),使用AT89C52作為小車的檢測和控制核心。根據(jù)題目設(shè)定的行進(jìn)及具體要求,分別采用紅外傳感器進(jìn)行尋跡行駛、黑帶采集及變速行駛,采用
2021-08-27 07:43:33
?2019.3一2019.7 基于MK60DN512ZVLQ10 的室外自動尋跡智能越野車(集體項(xiàng)目)?2020.3一2020.7 基于NXP i.MX RT1064的電磁AI尋跡智能小車(集體項(xiàng)目
2021-12-20 07:11:07
本設(shè)計(jì)選擇通用、價(jià)廉的51單片機(jī)為控制平臺,選擇常用的點(diǎn)擊模型車為機(jī)械平臺,通過細(xì)化設(shè)計(jì)要求,結(jié)合傳感器技術(shù)、電機(jī)控制技術(shù)、無線通信技術(shù)等相關(guān)知識實(shí)現(xiàn)小車的各種功能。設(shè)計(jì)完成以激光筆控制、紅外遙控等
2022-02-16 06:04:17
買的書帶的 可以參考下嵌入式實(shí)時(shí)操作系統(tǒng)μCOS-Ⅱ經(jīng)典實(shí)例——基于STM32處理器-光盤資料.zip (12.94 MB )
2019-02-13 06:35:07
求各位大神分享資料軟件實(shí)現(xiàn)智能車的控制系統(tǒng)飛思卡爾
2015-04-26 23:15:19
#基于stm32f103c8t6HAL庫六路電磁尋跡智能車學(xué)習(xí)單片機(jī)第一次參加相關(guān)比賽,下面分享一些關(guān)于調(diào)車的心得。1.控制舵機(jī)舵機(jī)是控制小車轉(zhuǎn)向的器件,而PWM波可以控制舵機(jī),占空比越大,舵機(jī)旋轉(zhuǎn)
2021-12-07 06:47:01
基于μCOS-Ⅱ的嵌入式TCPIP_協(xié)議棧的研究與實(shí)現(xiàn)
2012-08-20 09:28:51
引言 本文主要設(shè)計(jì)的是一輛自主識別道路的智能車。整個(gè)系統(tǒng)采用了16位單片機(jī)mc9s12dg128,模型車本身帶有差速器和后輪驅(qū)動,需要設(shè)計(jì)完成基于單片機(jī)的自動控制系統(tǒng)使得模型車在封閉的跑道
2018-11-05 15:50:57
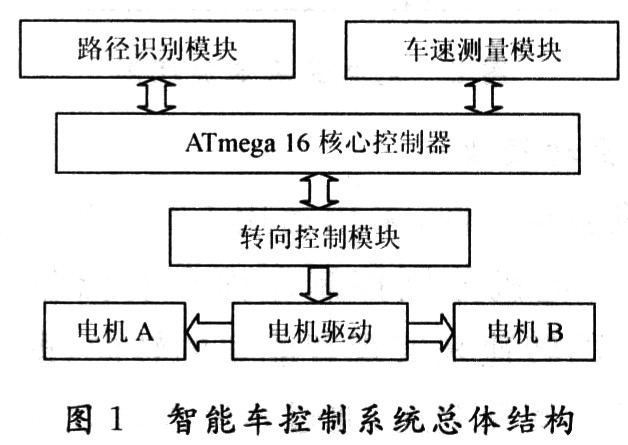
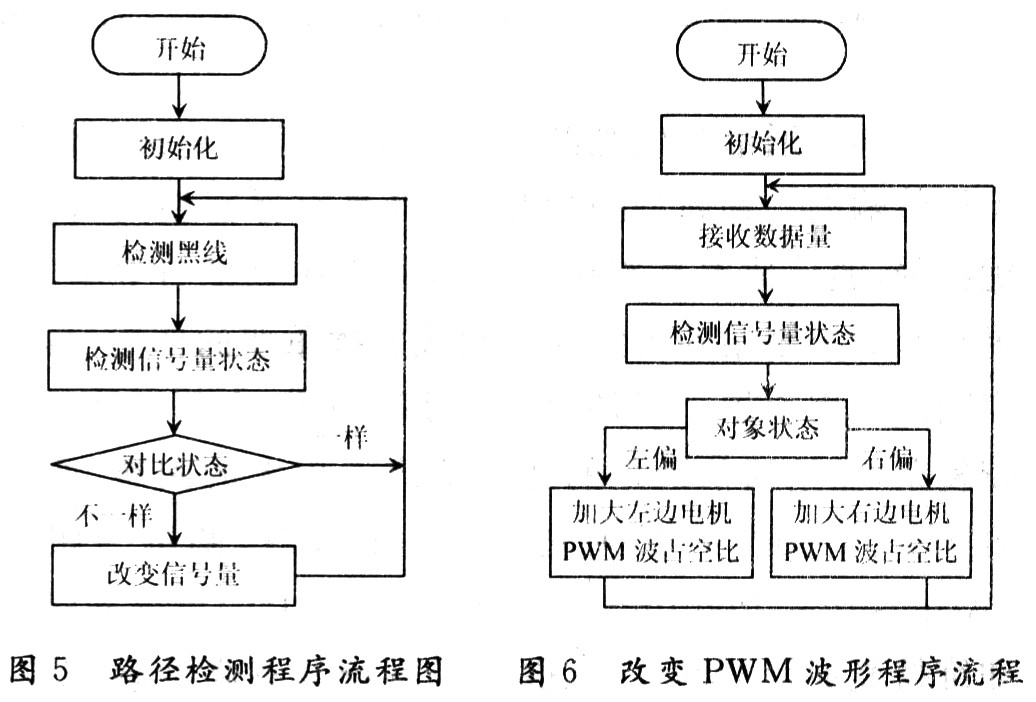
。 2 軟件設(shè)計(jì) 本系統(tǒng)的控制方案是根據(jù)路徑識別模塊和車速檢測模塊所獲得的當(dāng)前路徑和車速信息,控制舵機(jī)和直流驅(qū)動電機(jī)動作,從而調(diào)整智能車的行駛方向和速度。 圖7為系統(tǒng)程序流程圖。 智能模型車的路徑
2018-11-06 15:08:45
本帖最后由 qzq378271387 于 2012-8-16 15:53 編輯
基于紅外傳感器的智能尋跡小車資料
2012-08-16 15:52:26
如何利用CH32V103R8T6和RT-Thread實(shí)現(xiàn)智能視覺組智能車的設(shè)計(jì)?
2021-10-21 08:33:38
智能車系統(tǒng)是由哪些模塊組成的?如何利用MCU核心板去實(shí)現(xiàn)智能車系統(tǒng)設(shè)計(jì)?
2021-10-26 08:06:54
如何利用RT-Thread操作系統(tǒng)實(shí)現(xiàn)四輪組智能車的設(shè)計(jì)?
2021-10-21 06:33:27
摘要:本智能車是以鋁合金為車架,AT89S52單片機(jī)為控制核心,加以直流電機(jī)、舵機(jī)、光電傳感器、火焰?zhèn)鞲衅骱碗娫措娐芬约捌渌娐窐?gòu)成。系統(tǒng)由89S52通過IO口控制小車的前進(jìn)后退以及轉(zhuǎn)向。舵機(jī)帶動
2021-12-13 06:51:17
一種基于ATmega8的電動車蓄電池智能管理系統(tǒng)設(shè)計(jì)
2021-05-14 06:01:23
在 1:10 模型車中開發(fā)適用于汽車防撞系統(tǒng)的測試床。
2019-11-05 06:22:53
實(shí)時(shí)操作系統(tǒng)μCOS-Ⅱ在泵站溫控系統(tǒng)中應(yīng)用
2013-04-22 13:02:15
的功能吧:基于51單片機(jī),利用火焰感應(yīng)、溫度傳感、GSM、尋跡和驅(qū)動等多個(gè)模塊,實(shí)現(xiàn)對倉庫或有毒易燃物品的無人化二十四小時(shí)監(jiān)控,更靈敏更經(jīng)濟(jì)。可以實(shí)現(xiàn)智能車在閉環(huán)控制以及接受智能車對于倉庫的監(jiān)控信息反饋
2014-04-29 00:11:42
699 16物聯(lián)網(wǎng)產(chǎn)業(yè)精英創(chuàng)新班 兒童健康防走失追蹤設(shè)備的設(shè)計(jì)與實(shí)現(xiàn) 設(shè)計(jì) 生產(chǎn)實(shí)踐700 16物聯(lián)網(wǎng)產(chǎn)業(yè)精英創(chuàng)新班 嵌入式智能娛樂影音系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn) 設(shè)計(jì) 生產(chǎn)實(shí)踐701 16物聯(lián)網(wǎng)產(chǎn)業(yè)精英創(chuàng)新
2021-07-19 06:06:59
嵌入式實(shí)時(shí)操作系統(tǒng)μCOS-Ⅱ經(jīng)典實(shí)例—基于STM32處理器-光盤資料,一共兩個(gè)部分
2016-06-04 16:07:02
怎么實(shí)現(xiàn)智能車磁導(dǎo)航中的信號調(diào)理電路設(shè)計(jì)?智能車控制電路對檢測信號的要求是什么?
2021-05-12 06:04:02
本文介紹了一種智能車控制系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)方法。通過大量實(shí)驗(yàn)測試證明,該智能車能快速平穩(wěn)地在制作的賽道上跟蹤黑色引導(dǎo)線并行駛,而且尋跡效果良好,控制響應(yīng)速度快,動態(tài)性能良好,穩(wěn)態(tài)誤差小,系統(tǒng)的穩(wěn)定性和抗干擾能力強(qiáng)。
2021-05-18 06:46:48
智能車競賽背景全國大學(xué)生智能車競賽是一項(xiàng)舉辦了十四屆的大學(xué)生自動控制類科技競賽,它要求指定的車模能夠在規(guī)定的賽道上實(shí)現(xiàn)路徑識別、自主尋跡,并快速行駛。麻雀雖小,五臟俱全,雖然競賽智能車沒有現(xiàn)實(shí)生活中
2021-07-29 06:00:40
智能尋跡滅火小車的主控芯片使用的是STC89C52單片機(jī),雖然是51系列的單片機(jī),但是性能可以滿足本設(shè)計(jì)。小車重要的電機(jī)驅(qū)動模塊選用的是L298芯片驅(qū)動,控制電機(jī)的前進(jìn)和后推。利用紅外傳感器探測
2021-07-19 07:02:38
本文開發(fā)了一種基于光電傳感和路徑記憶的智能車導(dǎo)航系統(tǒng)。
2021-05-12 07:04:03
`手機(jī)遠(yuǎn)程遙控.一鍵啟動;尊貴觸手可及 傳承高級轎車的高貴、盡享豪華風(fēng)范!手機(jī)與汽車通過軟件,實(shí)現(xiàn)無線同步,實(shí)現(xiàn)一鍵啟動免鑰用車!汽車移動管家——-汽車大智能時(shí)代面向國際!汽車總線智能控車系統(tǒng)具有
2014-04-10 08:22:51
目 錄0 前言22 無線語音遙控智能車設(shè)計(jì)概述42.1 設(shè)計(jì)目的42.2 設(shè)計(jì)實(shí)現(xiàn)總體功能43 系統(tǒng)總體方案53.1 方案論證53.1.1 方案一53.1.2 方案二53.1.3 方案三53.2
2012-07-31 22:12:51
消防智能電動車設(shè)計(jì)與制作目錄摘要:4關(guān)鍵詞:4Abstract:4Keywords:41.系統(tǒng)設(shè)計(jì)51.1設(shè)計(jì)要求51.1.1設(shè)計(jì)任務(wù)51.1.2設(shè)計(jì)要求51. 2模塊方案比較與論證61.2.1車
2012-07-31 22:19:55
做一個(gè)攝像頭的智能車
2014-10-14 11:31:45
求一套智能車設(shè)計(jì),本人想要做智能車方面的,借鑒一下。
2015-11-10 00:37:42
電動智能車的硬件設(shè)計(jì)與方法測試80C51單片機(jī)是一款八位單片機(jī),他的易用性和多功能性受到了廣大使用者的好評。這里介紹的是如何用80C51單片機(jī)來實(shí)現(xiàn)長春工業(yè)大學(xué)的畢業(yè)設(shè)計(jì),該設(shè)計(jì)是結(jié)合科研項(xiàng)目而確定
2009-12-07 17:22:30
隨著汽車電控系統(tǒng)向集成化、智能化方向發(fā)展,響應(yīng)速度更快、控制更精準(zhǔn)的卡鉗集成式電子駐車系統(tǒng) MOC EPB 逐漸在乘用車中占據(jù)主導(dǎo)地位,并且在輕型卡車中應(yīng)用也越來越廣泛。為了滿足制動法規(guī)GB 21670-2008以及高級別制動駕駛對于駐車系統(tǒng)的需求,EPB 同時(shí)也是智能駕駛系統(tǒng)里制動冗余的重要組成部分。
2020-12-17 07:56:55
``#Hannah漢娜模型車#兼容Arduino與樹莓派主控。模型車一直是我童年的理想和愛好,在學(xué)業(yè)期,由于父母的認(rèn)知層面有限以及其他客觀的因素,后期被迫放棄了。多年后時(shí)代發(fā)展,技術(shù)進(jìn)步。疫情期間
2020-05-24 13:57:18
設(shè)計(jì)目標(biāo):①軟件設(shè)計(jì)基于單片機(jī)的智能車系統(tǒng);②實(shí)現(xiàn)操作界面登錄功能;③實(shí)現(xiàn)管理員操作系統(tǒng)界面功能;④實(shí)現(xiàn)用戶操作系統(tǒng)界面功能;⑤實(shí)現(xiàn)智能車控制系統(tǒng)界面功能。求各位大神指點(diǎn)迷津,先實(shí)現(xiàn)無線遙控模塊
2015-04-26 20:55:15
設(shè)計(jì)目標(biāo):軟件設(shè)計(jì)基于單片機(jī)的智能車系統(tǒng)(飛思卡爾)如何實(shí)現(xiàn)上位機(jī)與下位機(jī)之間的通信
2015-04-21 23:13:14
性價(jià)比極高而又堪稱真正“智能”的機(jī)器人。 初步方案:根據(jù)前面的分析,這個(gè)系統(tǒng)的結(jié)構(gòu)框圖如下午所示,他主要包括兩大部分:遙控端和受控端。遙控端主要實(shí)現(xiàn)路徑輸入,通過智能手機(jī)觸摸屏畫出路徑,并通過藍(lán)牙發(fā)送路徑
2013-10-15 12:46:58
網(wǎng)上的資料,舵機(jī)好像只能實(shí)現(xiàn)一個(gè)方向轉(zhuǎn),可是某些智能車怎么怎么依靠舵機(jī)實(shí)現(xiàn)左右轉(zhuǎn)向呢???
2019-06-24 00:23:41
本文介紹了一種基于CAN總線的車用智能傳感器系統(tǒng)設(shè)計(jì)。
2021-05-13 06:16:47
請問怎樣去設(shè)計(jì)一種電動車蓄電池智能管理系統(tǒng)?
2021-05-12 06:29:06
本帖最后由 晨曦問 于 2013-5-11 15:52 編輯
請問各位朋友,我想改裝一下遙控模型車。我的設(shè)想: 1.啟動模型車,以及車走的時(shí)候,車前燈亮2.模型車停止5s后,所有燈滅3.左
2013-05-10 23:22:44
求幫助啊,金屬傳感器電路圖!我要做一個(gè)金屬傳感器的尋跡車,不會做,求幫助!
2012-11-12 22:30:25
基于實(shí)時(shí)操作系統(tǒng)μCOS-Ⅱ的嵌入式GUI設(shè)計(jì)實(shí)現(xiàn)
2009-03-28 09:49:30 26
26 主要討論了將μCOS-Ⅱ?qū)崟r(shí)操作系統(tǒng)在80196KC單片機(jī)上進(jìn)行移植的原理和方法 ,給出了一個(gè)以TaskingC為編譯器、以80196KC為處理器å對μCOS-Ⅱ?qū)崟r(shí)操作系統(tǒng)進(jìn)行移植的具體實(shí)例.
2009-04-24 13:41:2327 模型車運(yùn)動學(xué)仿真系統(tǒng)是集硬件、軟件于一身的完整且復(fù)雜的系統(tǒng),它在汽車駕駛模擬訓(xùn)練領(lǐng)域的市場前景非常廣闊。但是,采用傳統(tǒng)的數(shù)學(xué)建模方法,很難得到精確而又簡單的數(shù)
2009-09-11 16:23:2113 基于C8051F040的模型車無線控制系統(tǒng)的設(shè)計(jì)
0 引 言 汽車耐久性試驗(yàn)是汽車試驗(yàn)的重要組成部分,而在試驗(yàn)過程中試驗(yàn)人員駕駛行為的變化,往往導(dǎo)致實(shí)
2009-11-10 10:47:10964 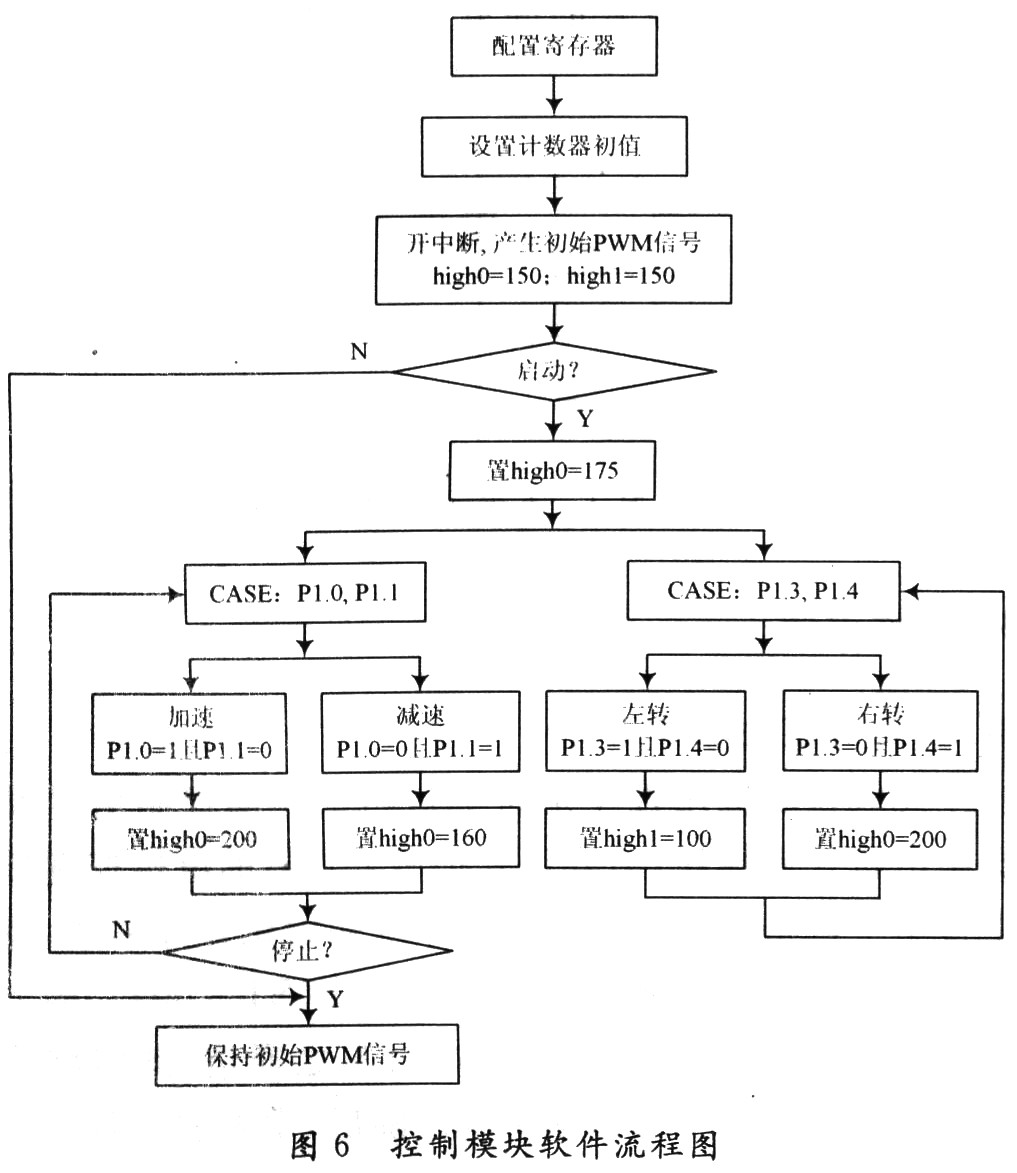
μCOS-Ⅱ在ARM系列單片機(jī)S3C44B0x上的移植
引 言 目前,嵌入式系統(tǒng)在工業(yè)控制、家用電器、移動通信、PDA等各種領(lǐng)域得到了越來
2009-11-12 16:47:311090 
基于μCOS-Ⅱ系統(tǒng)的智能尋跡模型車的設(shè)計(jì)與實(shí)現(xiàn)
0 引 言
智能車輛是當(dāng)今車輛工程領(lǐng)域研究的前沿,它體現(xiàn)了車輛工程、人工智能、自動控制、計(jì)算機(jī)等多
2009-12-02 11:34:52678 智能卡操作系統(tǒng)(COS),什么是智能卡操作系統(tǒng)(COS)
COS是駐留SIM卡內(nèi)的操作系統(tǒng)軟件,類似于PC上的DOS系統(tǒng),不過比DOS系統(tǒng)要簡單的多。COS
2010-04-02 13:37:381486 基于AVR單片機(jī)視覺智能尋跡車設(shè)計(jì)與實(shí)現(xiàn)方案
0 引 言 智能運(yùn)輸系統(tǒng)是未來交通運(yùn)輸系統(tǒng)發(fā)展的趨勢,智能汽車在智能運(yùn)輸系統(tǒng)中扮演著十分重要的角
2010-04-23 15:26:223297 
本文利用飛思卡爾公司的MC9S12XS128單片機(jī),以模型汽車作為平臺,通過自動識別道路中心位置處由通有交變電流的導(dǎo)線所產(chǎn)生的電磁場道路檢測,設(shè)計(jì)制作一種能實(shí)現(xiàn)自動尋跡的 智能車
2011-07-06 18:01:32227 基于光電傳感器的智能小車自動尋跡控制系統(tǒng)
2015-11-04 15:52:586 單片機(jī)的智能尋跡避障小車設(shè)計(jì)整理過的智能小車畢業(yè)論文
2016-03-14 15:50:1126 智能小車尋跡的核心技術(shù)尋光 尋跡 電機(jī)驅(qū)動原理分析。
2016-04-26 14:49:237 基于單片機(jī)C51智能尋跡避障小車,包括元件清單 分立模塊 原理圖 PCB 程序
2016-07-21 16:35:2838 嵌入式實(shí)時(shí)操作系統(tǒng)μCOS-Ⅱ經(jīng)典實(shí)例——基于STM32處理器-光盤資料
2017-01-14 12:04:3025 尋跡和避障智能小車系統(tǒng)設(shè)計(jì)_李志宜
2017-01-19 21:54:153 智能迷宮尋跡小車報(bào)告 (1)
2017-02-28 16:49:3510 自動尋跡車是一種具備自主判斷、決策能力的綜合智能系統(tǒng)。它的設(shè)計(jì)集機(jī)械、電子、檢測技術(shù)與智能控制于一體,在社會生活中有著廣泛的應(yīng)用,例如自動化生產(chǎn)線的物料配送機(jī)器人,醫(yī)院的機(jī)器人護(hù)士,商場的導(dǎo)游機(jī)器人
2017-11-26 10:24:212 智能家居是指利用先進(jìn)的計(jì)算機(jī)技術(shù)、網(wǎng)絡(luò)通信技術(shù)、綜合布線技術(shù),將與家居生活有關(guān)的名種子系統(tǒng)有機(jī)地結(jié)合,通過統(tǒng)籌管理,使家居生活更加舒適、安全、有效。作為小區(qū)智能化的重要組成部分,智能家居平臺是通過其核心——家庭智能終端實(shí)現(xiàn)家居智能化。
2019-07-22 08:13:001584 
該項(xiàng)目的主要內(nèi)容是:在智能尋跡避障小車尋跡系統(tǒng)上擴(kuò)展避障、報(bào)警等電路模塊,然后運(yùn)用C語言對這些功能模塊電路進(jìn)行編程,使智能尋跡避障小車在行進(jìn)過程中,能對正前方的障礙物自動完成避障功能,并且遇障礙能夠
2019-04-16 08:00:0015 本車除一般非編程尋跡車具有的尋跡功能外,還增加了遇障停車、報(bào)警,轉(zhuǎn)彎時(shí)轉(zhuǎn)向燈提示功能。同時(shí)在電路原理上作了較大改變,是車尋跡靈敏度更高,實(shí)現(xiàn)較小的轉(zhuǎn)彎半徑。
2020-05-02 17:07:005778 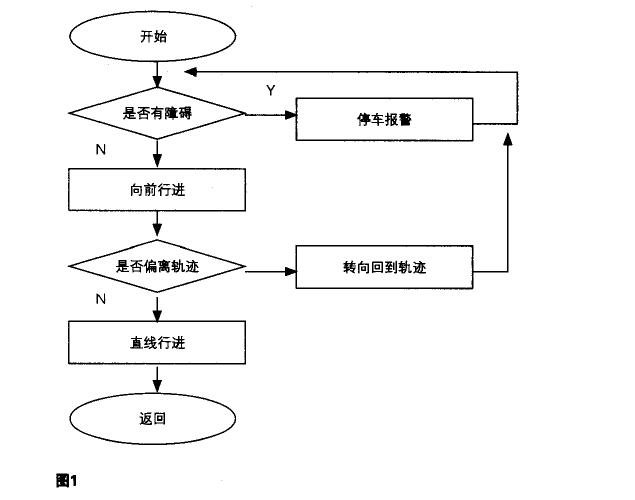
智能運(yùn)輸系統(tǒng)是未來交通運(yùn)輸系統(tǒng)發(fā)展的趨勢,智能汽車在智能運(yùn)輸系統(tǒng)中扮演著十分重要的角色。作者提出智能尋跡車作為構(gòu)建未來智能交通運(yùn)輸系統(tǒng)中重要部分,針對未來交通運(yùn)輸系統(tǒng)有導(dǎo)航線的環(huán)境命題假設(shè)下智能汽車的自主尋跡問題,提出一種基于視覺的智能尋跡車模設(shè)計(jì)方案,作為該假設(shè)問題的解決方案。
2020-05-07 09:19:16941 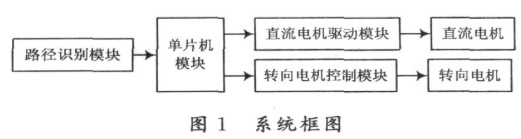
智能尋跡基于自動引導(dǎo)機(jī)器人系統(tǒng),可以實(shí)現(xiàn)小車自動識別路線。智能尋跡小車運(yùn)用傳感器、單片機(jī)、電機(jī)驅(qū)動及自動控制等技術(shù)實(shí)現(xiàn),管理時(shí)自動尋跡導(dǎo)航。該技術(shù)已經(jīng)應(yīng)用于無人駕駛機(jī)動車、無人工廠、倉庫、服務(wù)機(jī)器人
2020-10-10 10:17:124983 基于單片機(jī)尋跡巡線避障智能小車系統(tǒng)設(shè)計(jì)資料(畢設(shè)課設(shè)資料)
2021-11-12 16:36:0035 基于恩智浦MK60DN512Z系列單片機(jī)的智能模型車子程序集作者 徐挺/**********************************************************函數(shù)
2021-11-16 19:36:0122 原文標(biāo)題:AI大模型車端應(yīng)用如何真正貼近用戶需求 文章出處:【微信公眾號:德賽西威DESAYSV】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
2023-06-29 17:35:04195 
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論