 電子發燒友App
電子發燒友App


Cortex-M1處理器是流水線三級32位RISC處理器,采用了流行的高密度Thumb?-2指令集。它同時支持處理器和軟件要求,滿足了最小FPGA的面積預算,同時兼容從ARM7TDMI?處理器開始的ARM處理器Thumb代碼。雖然是Cortex處理器系列中最小的處理器,Cortex-M1處理器依然實現了每MHz 0.8 DMIPS。利用Cortex-M1處理器,OEM能夠在FPGA和HardCopy?ASIC以及分立器件中發揮其ARM體系結構的專業技術優勢。
Altera Cyclone III FPGA的ARM Cortex-M1開發套件為OEM提供了設計ARM處理器系統所需的工具。在ARM Cortex-M1開發套件中,以加密的SOPC Builder工具兼容知識產權(IP)格式來實現ARM Cortex-M1處理器。這樣,OEM能夠使用流行的Altera Quartus? II 開發軟件,將Cortex-M1處理器與其他系統組件集成到一起,這一軟件包括SOPC Builder工具。套件還為ARM RealView微控制器提供開發套件,以滿足所有嵌入式開發需求。Cortex-M1處理器受益于ARM聯絡社區豐富的工具支持,以及RTOS供應商的支持。
為簡化IP許可過程,Cortex-M1開發套件提供“點擊鏈接”式最終用戶許可協議,授權OEM開發不受限制的Cortex-M1處理器設計,使用時間是一年。許可為這些設計提供永久實施權利,包括1,000個版稅,可以在隨用隨付的基礎上迅速方便的展開應用。
特性
流水線三級32位ARM? Cortex處理器
適合在FPGA中實現,主要面向Altera? Cyclone? III FPGA。
SOPC Builder可用
低成本ARM Cortex-M1開發套件,包括ARM RealView微控制器開發套件。
由ARM聯絡社區的多種工具和操作系統提供支持
更簡單的許可過程
ARM處理器簡單移植途徑
集成可配置中斷控制器
集成系統定時器,增強RTOS支持。
可選調試、斷點和監視點單元
結構圖
二、Cortex-M3基礎學習
因為項目所需,所以不得不開始研究M3,我用的是NXP公司的LPC1768這個芯片,它是具有三級流水線的哈佛結構,帶獨立的本地指令和數據總線以及用于外設的稍微低性能的第三條總線,還包含一個支持隨機跳轉的內部預取指單元。好了,今天只是初步測試一下它的GPIO功能,所謂的GPIO也就是通用輸入/輸出口(General Purpose Input Output),萬丈高樓平地起,慢慢來吧。實驗的原理圖很簡單,就是幾個LED燈,關于燈的電流及電壓參數,這里不作詳細介紹,有興趣的可以到網上或供應商那里要一份數據手冊看一下,做技術的不能懶,有些東西該看的還是要看的。

圖1 硬件原理圖
硬件原理圖很簡單了,74LVC244是用來驅動LED的,74LVC244內部就是8個三態門,關于它的詳細電氣參數,請參閱它的數據手冊。關于程序也不是太難,有幾個地方要說一下。即然是GPIO實驗,當然要關注GPIO的配置了,由于大部分引腳都具有一個以上功能,所以首先要配置引腳功能寄存器PINSEL,只有當引腳配置為GPIO功能時,GPIO的方向位才有效,對于其它功能來說,方向是自動的。關于引腳功能寄存器PINSEL功能如下表所示:
PINSEL0~PINSEL9的值功能復位后的值
00默認功能,通常為GPIO口00
01第一個可選功能
10第二個可選功能
11第三個可選功能
PINSEL寄存器每兩位控制一個引腳,由于各個引腳的功能不一樣,所以PINSEL0~PINSEL9的配置也相應的有所不同,想詳細了解這10個寄存器的功能可以參看《user.manual.lpc17xx》,這個手冊可以到NXP的網站上去下載。由于這次實驗只是用到GPIO功能,所以暫時不用管這個寄存器,用它的默認值就可以了。
另一個寄存器是引腳模式選擇寄存器PINMODE,它控制所有端口的工作模式,包括是否配置上拉/下拉電阻和特定的開漏操作模式等。引腳模式選擇寄存器PINMODE的功能如下表所示:
PINMODE0~PINMODE9的值功能復位后的值
00引腳使能片內上拉電阻00
01中斷模式
10引腳沒有使能片內上拉/下拉電阻
11引腳使能下拉電阻
當引腳處于邏輯高電平時,中繼模式使能上拉電阻,當引腳處于邏輯低電平時,使能下拉電阻,當引腳配置為輸入且不是通過外部驅動時,引腳將保持上一個已知狀態。PINMODE_0D寄存器控制寄存器的開漏模式,引腳配置為輸出且值為0時,開漏模式會正常地將引腳電平拉低。但是如果輸出引腳為1,則引腳輸出驅動關閉,等同于改變了引腳的方向,實際上是模擬了一個開漏輸出。
PINMODE_0D0~PINMODE_0D4的值功能復位后的值
00引腳處于正常模式(非開漏模式)00
01引腳處于開漏模式
除了以上兩個寄存器要配置,與GPIO端口相關的寄存器還有快速端口值寄存器FIOPIN可以用來讀/寫端口的值,端口輸出置位寄存器FIOSET,當這個寄存器的相應位置1時,相應端口引腳輸出1,當然也可以從這個寄存器讀取當前引腳輸出的值,與它對應的寄存器是FIOCLR,當寄存器FIOCLR相應位置1時,相應引腳輸出0,但這個寄存器是只寫寄存器,不能讀取數據。好了,關于這些寄存器先總結到這,詳細的配置還要看LPC1768的用戶手冊《user.manual.lpc17xx》,當然也可以經常去NXP網站逛逛看看其它的handbook或whitepaper 好了,下面給出實驗程序,由于程序太多,只給出部分,剩下的源文件可以到工程文件夾中去找:
/*********************************************************************************
文件名稱:mian.c
功 能: 主要調度函數及應用函數
編譯環境: MDKV4.12
時 鐘: 外部12Mhz
日 期: 11/08/16
作 者: 懶貓愛飛
備 注:NULL
---------------------------------------------------------------------------------
修改內容:NULL
修改日期:XXXX年xx月xx日 xx時xx分
修改人員:xxx xxx xxx
**********************************************************************************/
#include“main.h”
volatile unsigned lONg SysTickCnt; /* 用于系統時鐘計數*/
/********************************************************************************
* 函數名稱:void SysTick_Handler (void)
* 函數功能: 系統節拍定時器中斷函數,每1ms計數一次
* 入口參數: 無
* 出口參數: 無
* 備 注:無
*******************************************************************************/
void SysTick_Handler (void)
{
SysTickCnt++;
}
/********************************************************************************
* 函數名稱:void Delay (unsigned long tick)
* 函數功能: 毫秒級延時函數
* 入口參數: unsigned long tick -- 延時時長
* 出口參數: 無
* 備 注:無
*******************************************************************************/
void DelayMs (unsigned long tick)
{
unsigned long systickcnt;
systickcnt = SysTickCnt;
while ((SysTickCnt - systickcnt) 《 tick);
}
/********************************************************************************
* 函數名稱:void PortInit(void)
* 函數功能: 端口初始化
* 入口參數: 無
* 出口參數: 無
* 備 注:無
*******************************************************************************/
void PortInit(void)
{
GPIO1-》FIODIR = 0xB0000000; /* LEDs on PORT1 defined as Output */
GPIO2-》FIODIR = 0x0000007C; /* LEDs on PORT2 defined as Output */
Led1Off(); /* 初始化時熄滅所有的燈*/
Led2Off();
Led3Off();
Led4Off();
Led5Off();
Led6Off();
Led7Off();
Led8Off();
}
/********************************************************************************
* 函數名稱:int main(void)
* 函數功能: 主函數
* 入口參數: 無
* 出口參數: 無
* 備 注:無
*******************************************************************************/
int main(void)
{
SystemInit(); /* 系統初始化,函數在system_LPC17xx.c文件夾中定義*/
SysTick_Config(SystemFrequency/1000 - 1); /* 配置時鐘中斷,每1ms中斷一次*/
/* 在core_cm3.h中定義*/
PortInit(); /* 端口初始化*/
while(1)
{
Led1On(); //LED1開
Led4On(); //LED4 開
DelayMs(200);
Led1Off(); //LED1關
Led4Off(); //LED4關
DelayMs(200);
}
}
因為程序是最基礎的實驗,所以不是太難,程序中延時函數用的是系統節拍定時器,每1m中斷一次,系統節拍定時器的中斷配置函數是SysTick_Config(uint32_t ticks)它在core_cm3.h中有定義,有興趣的話可以看看。GPIO是一個結構體指針,原型在LPC17XX.H這個頭文件中,其定義的原型如下所示:
typedef struct
{
__IO uint32_t FIODIR;
uint32_t RESERVED0[3];
__IO uint32_t FIOMASK;
__IO uint32_t FIOPIN;
__IO uint32_t FIOSET;
__O uint32_t FIOCLR;
} GPIO_TypeDef;
還有幾個宏定義,如下所示:
1)、#define GPIO1 (( GPIO_TypeDef *) GPIO1_BASE)
上面這個宏是把GPIO1指向芯片GPIO1的基址上,
2)、#define GPIO1_BASE (GPIO_BASE + 0x00020)
3)、#define GPIO_BASE (0x2009C000UL)
這三個宏就把GPIO的基址定義了出來,關于LPV1768內部地址的分配情況,可以參看它的數據手冊,也可參考一下《ARM Cortex-M3 權威指南》。
有輸出總會有輸入,今天測試一下按鍵的功能,第一節已經說過了與GPIO端口相關的寄存器,這里不在重復,想要從端口讀取數據,首先把FIODIR這個寄存器設置為輸入,再從FIOPIN寄存器讀取數據就可以了,這個寄存器具有讀寫功能。下面說一下這個實驗的電路圖,如下所示:
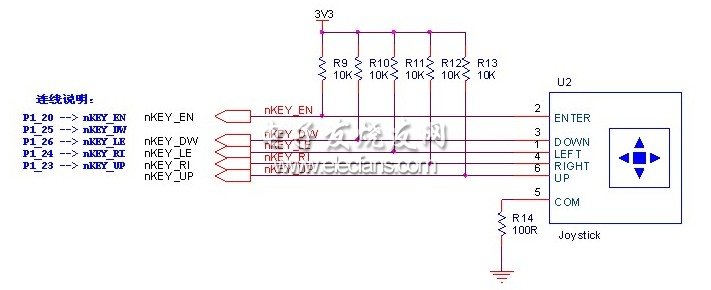
圖1 JoySTick按鍵連線圖
關于按鍵電路還有一個,不過是接在外部中斷0 上的,其電路圖如下圖所示:

這次實驗沒有涉及到外部中斷,都是做普通的IO輸入使用的,所以在這里外部中斷就做學習總結了。下面給出這次實驗的主程序:
/*********************************************************************************
文件名稱:mian.c
功 能: 主要調度函數及應用函數
編譯環境: MDKV4.12
時 鐘: 外部12Mhz
日 期: 11/08/16
作 者: 懶貓愛飛
備 注:NULL
---------------------------------------------------------------------------------
修改內容:NULL
修改日期:XXXX年xx月xx日 xx時xx分
修改人員:xxx xxx xxx
**********************************************************************************/
#include“main.h”
volatile unsigned lONg SysTickCnt; /* 用于系統時鐘計數*/
/********************************************************************************
* 函數名稱:void SysTick_Handler (void)
* 函數功能: 系統節拍定時器中斷函數,每1ms計數一次
* 入口參數: 無
* 出口參數: 無
* 備 注:無
*******************************************************************************/
void SysTick_Handler (void)
{
SysTickCnt++;
}
/********************************************************************************
* 函數名稱:void Delay (unsigned long tick)
* 函數功能: 毫秒級延時函數
* 入口參數: unsigned long tick -- 延時時長
* 出口參數: 無
* 備 注:無
*******************************************************************************/
void DelayMs (unsigned long tick)
{
unsigned long systickcnt;
systickcnt = SysTickCnt;
while ((SysTickCnt - systickcnt) 《 tick);
}
/********************************************************************************
* 函數名稱:void PortInit(void)
* 函數功能: 端口初始化
* 入口參數: 無
* 出口參數: 無
* 備 注:無
*******************************************************************************/
void PortInit(void)
{
GPIO1-》FIODIR = 0xB0000000; /* LEDs on PORT1 defined as Output */
GPIO2-》FIODIR = 0x0000007C; /* LEDs on PORT2 defined as Output */
LedAllOff(); /* 初始化時熄滅所有的燈*/
}
/********************************************************************************
* 函數名稱:int main(void)
* 函數功能: 主函數
* 入口參數: 無
* 出口參數: 無
* 備 注:無
*******************************************************************************/
int main(void)
{
unsigned char LedFlag = 1; // 記錄LED狀態
SystemInit(); /* 系統初始化,函數在system_LPC17xx.c文件夾中定義*/
SysTick_Config(SystemFrequency/1000 - 1); /* 配置時鐘中斷,每1ms中斷一次*/
/* 在core_cm3.h中定義*/
PortInit(); /* 端口初始化*/
while(1)
{
if(!LedFlag)
{
Led1On(); // 點亮LED
}
else
{
Led1Off(); // 熄滅LED
}
if(!KEY_VAL)
{
DelayMs(10);
while(!KEY_VAL);
LedFlag ^=1; // Led狀態改變一次
}
if(!KEY_EN) // 此處是為了測試搖桿按鍵的功能是否正常
{
DelayMs(10);
while(!KEY_EN);
Led8Neg(); // 點亮LED // Led狀態改變一次
}
}
}
上一節對程序沒有做過多的解釋,這里詳細分析一下,工程中包含的源文件如下圖所示:
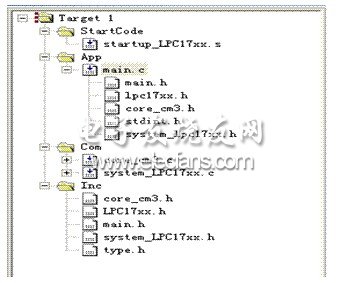
工程中startup_LPC17XX.s是M3的啟動文件,啟動文件由匯編語言寫的,它的作用一般是下面這幾個:
1)堆和棧的初始化
2)向量表定義
3)地址重映射及中斷向量表的轉移
4)設置系統時鐘頻率
5)中斷寄存器的初始化
6)進入C應用程序
工程中main.c是我寫的應用程序,也就是這次實驗的程序,core_cm3.c與core_cm3.h主要是M3外圍驅動源代碼與頭文件,使用時一般不需要修改,直接調用就可以。system_LPC17xx.c與system_LPC17xx.h是關于系統的文件,里面主要提供了系統初始化函數SystemInit(),文件中默認情況下定義的晶振的大小為12M,使用的是外部晶振,還使用了PLL0倍頻,關于倍頻的問題,以后慢慢再總結。芯片LPC1768的初始化主要包括時鐘配置,電源管理,功耗管理等。相比較而言,時鐘配置相對復雜,因為它包括兩個PLL倍頻電路,一個是主PLL0主要是為系統和USB提供時鐘,另一個是PLL1專門為USB提供48M時鐘,但也可以不使用它們。由于時鐘配置比較靈活,所以相以設置這些參數也比較復雜,但是這些在系統文件中已有明確的定義,所以想要變動時只需修改系統文件中相應的宏或函數即可。
下面簡要總結一下main()函數,首先是系統初始化函數SystemInit(),上面說過它在system_LPC17xx.c這個源文件中,這個函數主要完成了對時鐘的配置,系統功耗PCONP,時鐘輸出,flash加速等系統資源配置。如果要進行修改可以參考源文件的修改方法,雖然是英文注釋,但都非常簡單,有興趣的可以打開看看,不過一般情況下我們拿來直接用就好了不用修改的。
函數SysTick_Config(SystemFrequency/1000 - 1) 是用來配置系統時鐘節拍的,它的原型在core_m3.c這個源文件中。實驗程序中用的延時函數都是硬件延時,其實就是系統節拍定時器所產生的。使用硬件延時的原因是1、不占用軟件系統資源,2、比較精確。系統定時器配置很簡單,使用也很方便,專為系統軟件或系統管理軟件提供間隔中斷。系統節拍定時器的時鐘源可以是內核時鐘也,可以是外部時鐘,外部時鐘P3.26腳引入,當然想從這個引腳輸入時鐘,需要將這個引腳先配置成STCLK功能。系統節拍定時器是一個24位定時器,當計數值達到0時產生中斷。系統節拍定時器的功能就是為下一次中斷提供前提供一個固定時間間隔。由于節拍定時器是24位的,所以使用時不能與其它定時器混為一談,一定要注意定時時長的限制,不能超過界限。
最后再說一下數據類型的問題,在8位機中數據位找一般就是8位的所以,定義變量時一般選用單字節處理速度會快些,但到了32位機中,數據位寬一般是32位的,所以定義變量時一般用4字節會好些。在core_cm3.c中有關于數據類型的定義,有興趣的可以打開看看。
無論是哪款單片機應該都有對應的中斷的功能,中斷在嵌入式系統的地位毋庸置疑。LPC1768微處理器包括4個外部中斷,分別是EINT0、EINT1、EINT2、EINT3對應的引腳分別是P2.10~P2.13,這幾個引腳也可以作為通用IO口使用。名個外部中斷可以設置成低電平/高電平或上升沿/下降沿有效,它們還有一個功能就是可用于將處理器從睡眠、深度睡眠或掉電模式中喚醒。涉及到外部中斷的寄存器主要有以下幾個:
寄存器名稱描述功能默認值
EXTINT外部中斷標志寄存器設置或查看中斷標志0x00
EXTMODE外部中斷模式寄存器設置電平觸發或邊沿觸發0x00
EXTPOLAR外部中斷極性寄存器設置為高/低電平或上升/下降沿觸發0x00
PINSEL4引腳功能選擇寄存器選擇P2引腳的功能0x00
因為實驗選用中斷方式而非查詢方式來測試中斷,因中P2.10口接有一個按鍵,所以就用這個按鍵來作個簡單的中斷實驗,由于是選用的是下降沿觸發,所以還涉及一個寄存器:IO2IntenF這個寄存器的功能是使能P2口的下降沿中斷功能。因為只是實驗,所以電路很簡單,還是使用的前兩次用的電路圖,如下所示:

圖1 LED指示電路
還有一個電路,其實就是在P2.10口上接了一個輕工觸按鍵,以觸發外部中斷,這里就不上圖了。好了,由于實驗內容簡單,下面給出中斷程序,關于主程序有興趣的話可以參看附件中的,里面有完整的Real MDK4.10建立的工程工件:
/*********************************************************************************
文件名稱:extint.c
功 能: LPC1768的外部中斷函數
編譯環境: MDKV4.12
時 鐘: 外部12Mhz
日 期: 11/08/18
作 者: 懶貓愛飛
備 注:NULL
---------------------------------------------------------------------------------
修改內容:NULL
修改日期:XXXX年xx月xx日 xx時xx分
修改人員:xxx xxx xxx
**********************************************************************************/
#include “includes.h”
volatile uint32_t eint0_counter = 8; // 初始化時第一個燈亮
/********************************************************************************
* 函數名稱:void EINT0_IRQHandler (void)
* 函數功能: 外部中斷0函數入口
* 入口參數: 無
* 出口參數: 無
* 備 注:無
*******************************************************************************/
void EINT0_IRQHandler (void)
{
SC -》 EXTINT = EINT0; /* 清中斷*/
switch(eint0_counter%8)
{
case 0: Led1Neg(); /* LED1狀態取反*/
break;
case 1: Led2Neg(); /* LED2狀態取反*/
break;
case 2: Led3Neg(); /* LED3狀態取反*/
break;
case 3: Led4Neg(); /* LED4狀態取反*/
break;
case 4: Led5Neg(); /* LED5狀態取反*/
break;
case 5: Led6Neg(); /* LED6狀態取反*/
break;
case 6: Led7Neg(); /* LED7狀態取反*/
break;
case 7: Led8Neg(); /* LED8狀態取反*/
break;
default:break;
}
eint0_counter++; /* 計數值加1 */
}
/********************************************************************************
* 函數名稱:uint32_t EINTInit( void )
* 函數功能: 外部中斷0初始化函數
* 入口參數: 無
* 出口參數: 返回TURE或FALSE
* 備 注:如果是返回false則說明中斷入口函數沒有在中斷向量表中建立
*******************************************************************************/
uint32_t EINTInit( void )
{
PINCON -》 PINSEL4 = 0x00100000; /* 將P2.10腳設置為EINT0即第二功能*/
GPIOINT -》 IO2IntEnF = 0x200; /* 設置為下降沿觸發*/
SC -》 EXTMODE = EINT0_EDGE; /* 外部中斷模式選擇為邊沿觸發*/
SC -》 EXTPOLAR = 0; /* 外部中斷1極性設置,此處選默認的低電平或下降沿*/
NVIC_EnableIRQ(EINT0_IRQn); /* 使能外部中斷0 */
return( TRUE );
}
這個程序只有兩個函數,一個是中斷處理函數,沒有什么不好理解,在這里不總結,關于中斷初始化函數,前面都是設置相關的中斷寄存器的,關于寄存器是怎么設置的可以看一下LPC1768的手冊,上面都有詳細的說明,在這里不再碼字總結。關于void NVIC_EnableIRQ(IRQn_Type IRQn)這個函數,它在core_cm3.h中有定義,其實就是設置中斷使能寄存器ISER,從名字就可以看出來了,它的功能就是使能中斷。這次外部中斷沒有用查詢的方式,查詢方式的原理就是設置好中斷,使能中斷,然后主程序一直查詢中斷位是否有中斷,然后再執行相應的措施。
三、Cortex-M3內核的μC/OSII性能研究
引言
μC/OSII是基于優先級的可剝奪型內核,系統中的所有任務都有一個唯一的優先級別,它適合應用在實時性要求較強的場合;但是它不區分用戶空間和系統空間,使系統的安全性變差。而移植到CortexM3內核上的μC/OSII系統一般是運行在特權級下,以至于應用程序也可以訪問操作系統的變量和常量,這樣使得系統的安全性與穩定性變得更差。
根據CortexM3內核的特點,對μC/OSII操作系統的安全性和穩定性進行研究。利用CortexM3內核上選配的MPU(Memory ProtectiON Unit,存儲器保護單元),對μC/OSII操作系統做適當的改進與優化。經測試,系統的安全性與穩定性得到很大的提高。
1 開發壞境
采用IAR5.30作為開發環境,移植μC/OSII2.86到CortexM3內核,選用配置了MPU(Memory Protection Unit,存儲器保護單元)的LPC1786處理器作為硬件實驗平臺,對操作系統的安全性和穩定性進行改進與優化。
2 CortexM3內核簡介
在CortexM3內核*有兩個堆棧指針:主堆棧指針(MSP),是系統上電后缺省的堆棧指針,它由OS內核、異常服務例程以及所有需要特權訪問的應用程序代碼來使用;進程堆棧指針(PSP),用于常規的應用程序代碼(不處于異常服務例程中時)。
CortexM3處理器支持線程模式和處理模式兩種工作模式,有特權級與用戶級兩個訪問等級。異常處理總是工作在處理模式,只可使用主堆棧指針。處理模式總是在特權級下運行,而線程模式可在特權和用戶級下運行。系統復位時總是處于線程模式的特權方式下,并且默認使用的堆棧指針是MSP。在用戶級下,對特殊功能寄存器和系統控制空間(SCS)的大部分寄存器的訪問是禁止的[2]。
經實驗驗證,在用戶級下使用MSR、MRS指令訪問特殊功能寄存器(CONTROL等),這些指令被當作NOP指令(空指令)執行,而對系統控制空間(SCS)寄存器訪問會產生精確的總線訪問異常。
另外,CortexM3內核還可以選配MPU(如LPC1700系列、LM3S系列處理器),用于對存儲器進行保護。設定一塊內存的訪問權限,對系統的安全性有很好的幫助。
3 μC/OSII內核簡介
μC/OSII是一個可移植、可固化、可裁剪的搶占式實時多任務內核。大部分用ANSI C語言編寫,只有一小部分與硬件相關的代碼用匯編語言編寫。至今,μC/OSII已經在40多種不同架構的微內核處理器上移植成功[4]。μC/OSII內核只提供了任務調度、任務管理、時間管理和任務間通信等基本功能,體系結構如圖1所示。進行系統移植時,只需要修改OS_CPU_C.C、OS_CPU.H、OS_CPU_A.ASM這3個文件即可。

圖1 μC/OSII體系結構
4 μC/OSII操作系統移植的改進
μC/OSII*****提供的基于CortexM3內核移植的μC/OSII系統一直工作在特權級下。這樣做的好處是,系統不用頻繁地切換訪問等級,而且開關中斷很快,利于實時性的實現;但是應用程序(用戶任務)也可以訪問特殊功能寄存器和系統控制空間(SCS)寄存器,修改操作系統的變量,這對系統的安全性是一種威脅,如果用戶任務程序跑飛,那就有可能破壞系統寄存器和變量[5]。
4.1 系統寄存器的設置
用戶應用程序運行在用戶級,使用PSP堆棧指針;操作系統函數運行在特權級,使用的也是PSP堆棧指針;而中斷服務例程運行在處理模式的特權方式下,使用MSP堆棧指針。
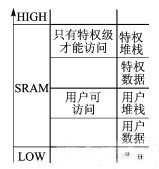
圖2 特權與用戶級分區
首先利用MPU把內存分為特權級訪問和用戶級訪問兩個區,如圖2所示。在系統初始化時,設置MPU相關寄存器,為系統分配任務堆棧與主堆棧:任務堆棧分配在用戶區,系統變量與主堆棧分配在特權區,只可特權級下訪問。
4.2 系統函數的修改
用戶任務工作在用戶級下,操作系統函數工作在特權級下,任務可能會在執行系統函數時執行上下文切換,因此系統要記錄任務切換時是處在特權級還是用戶級下,以便任務再次獲得處理器控制權時,切換到原先的訪問等級下。在任務創建時,加入訪問權限參數mode。
權限的值定義為:
#define OS_Mode_USER 1u //用戶級
#define OS_Mode_PRIVILEGE 0u //特權級
在創建任務函數與堆棧初始函數的參數中加入訪問權限參數,形式如下:
INT8U OSTaskCreateExt (……,INT8U mode );
OS_STK *OSTaskStkInit (……,INT8U mode);
在堆棧初始化時,把mode最后存到堆棧當中,以便任務第一次運行時進入相應的工作模式(特權級或用戶級)。統計任務和空閑任務的mode是OS_Mode_PRIVILEGE,而用戶任務為OS_Mode_USER。
4.3 OS_CPU_A.ASM文件中函數的修改
在OS_CPU_A.ASM文件中,只需修改函數PendSV_Handler(PendSV服務例程),任務切換是由它來完成的。同時,設置PendSV的優先級為最低,以便快速響應中斷,提高系統的實時性。PendSV服務例程的流程如圖3所示。
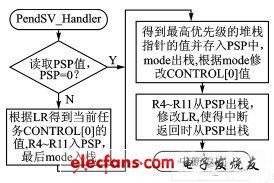
圖3 PendSV服務例程流程
任務切換上文的程序:
SUBS R0,R0,#0x24;調整PSP指針,mode、R4~R11共36字節
MRS R1,CONTROL;獲取當前任務的訪問等級mode
STM R0,{R1,R4R11};壓棧mode,R4~R11
LDR R1,=OSTCBCur;獲取OSTCBCur?﹥OSTCBStkPtr
LDR R1,[R1]
STR R0,[R1];存儲PSP值到任務控制塊切換下文的程序:
……;OSPrioCur=OSPrioHighRdy;
……;OSTCBCur=OSTCBHighRdy;
……;得到新任務的PSP值,存儲到R0中
LDM R0,{R1,R4R11};R1(mode),R4~R11出棧
MSR CONTROL,R1;修改CONTROL[0]
ORR LR,LR,#0x04;選擇返回時使用的堆棧
ADDS R0,R0,#0x24;調整PSP值
MSR PSP,R0;R0存入PSP中
4.4 系統函數的使用
系統函數都是在特權級下執行的,在應用程序中調用系統函數前應該切換到特權級,系統函數執行完畢后再切換后用戶級。調用形式如下:
ToPrivilege ();
OSFunction(Parameter1, Parameter2……);//系統函數
ToUser ();
在特權級下可以通過置位CONTROL[0]來進入用戶級。用戶級下是不能通過修改CONTROL[0]來回到特權級的,必須通過一個異常handler來修改CONTROL[0],才能在返回到線程模式后取得特權級。因此,從用戶級到特權級的方法就是產生一個異常,再在異常例程中修改CONTROL[0]。通常的方法是使用軟中斷SVC。
切換到特權級的代碼如下:
ToPrivilege;函數ToPrivilege ()
SVC 0
BX LR
SVC_Handler;SVC服務例程
MRS R1,CONTROL
AND R1,R1,#0xFE
MSR CONTROL,R1;回到特權級
BX LR
而從特權到用戶級就簡單了,只要執行切換程序就可以了,不用產生異常。切換到用戶級的代碼為:
ToUser;函數ToPrivilege ()
MRS R0,CONTROL
ORR R0,R0,#0x01;切換到用戶級
MSR CONTROL,R0
BX LR
4.5 其他改進方法
任務在用戶級+PSP下運行,而操作系統函數運行在特權級+MPS運行,中斷服務例程有硬件設定在處理模式+特權級+MSP,這樣系統的安全性和穩定性會更高。但是每個任務需要兩個堆棧PSP、MSP。這樣無疑增加了內存的使用(將近增加一倍),由于嵌入式芯片的片內RAM比較小,增加內存必然會增加成本,并且要對任務控制塊做相應的修改,存儲兩個堆棧。任務創建時對這兩個堆棧都要初始化,任務切換時判斷切換的堆棧與訪問權限,這些都增加了系統的開銷。
結語
系統連續穩定地運行10個小時以上沒出現任何問題,可見系統移植成功。利用CortexM3內核選配的MPU,對μC/OSII操作系統進行修改,只是增加了很小的系統開銷,卻使系統的安全性和穩定性得到了很大的提高。該方法可應用于對系統安全性與穩定性要求比較高的場合。
四、雙核ARM Cortex-A9 MPCore處理器
說明
雙核 ARM? CortexTM-A9 MPCoreTM 應用類處理器是 Altera Arria V SoC FPGAs 和 Cyclone V SoC FPGA 中的集成硬核知識產權(IP)組件。為進一步提高系統性能,很多ARM輔助系統資源合作伙伴為ARM Cortex-A9處理器提供同類最佳的開發工具和操作系統支持。
HPS
ARM Cortex-A9處理器結合了豐富的嵌入式外設、接口以及片內存儲器,以建立完整的硬核處理器系統(HPS)。HPS和FPGA架構的寬帶片內干線鏈接提供了100-Gbps的峰值帶寬,使ARM處理器和FPGA架構的硬件加速器能夠很好的共享數據。
特性
800-MHz雙核處理器支持對稱和非對稱多路處理
每一處理器包括以下組成:
高效的雙發超標量流水線(2.5 MIPS*每MHz)
用于媒體和信號處理加速的NEONTM媒體處理引擎
單精度和雙精度浮點單元
32-KB指令和32-KB數據高速緩存
連貫高速緩存,以增強處理器間的通信功能
采用了TrustZone?安全技術的存儲器管理單元
Thumb?-2技術,增強了代碼密度、性能和功效
Jazelle?擴展體系結構,加速了Java虛擬機
編程跟蹤宏單元,實現處理器指令流的全面可視化
共享512-KB、8路聯合L2高速緩存,按路、行或者主機進行鎖定
加速連貫端口,支持CPU擴展連貫存儲器訪問
普通中斷控制器
32位通用定時器
看門狗定時器
Altera? Arria? V SoC FPGA 和 Cyclone? V SoC FPGA 提供這些功能
* Dhrystones 2.1 基準測試











 工商網監
工商網監
評論