 電子發(fā)燒友App
電子發(fā)燒友App


引言
BLDC具備諸多優(yōu)勢,例如外型緊湊、結(jié)構(gòu)簡單、高效率、低噪音、較長使用壽命等等,這種電機(jī)越來越廣泛地應(yīng)用于自動(dòng)化、工業(yè)和消費(fèi)類電子產(chǎn)品等領(lǐng)域。圖1所示為典型的BLDC電機(jī)框圖,該電機(jī)包括一個(gè)梯形磁通的永磁同步電機(jī)、一個(gè)轉(zhuǎn)子位置檢測器(通常為三個(gè)霍爾傳感器)和一個(gè)驅(qū)動(dòng)電機(jī)的三相逆變器。另外,必須配置一個(gè)單片機(jī)(MCU),輸出特定的脈沖寬度調(diào)制(PWM)模式來驅(qū)動(dòng)BLDC電機(jī)。如同一個(gè)傳統(tǒng)直流電機(jī)那樣,電機(jī)的換流必須與轉(zhuǎn)子位置同步,用戶可以通過改變PWM的占空比來調(diào)節(jié)電機(jī)轉(zhuǎn)速。
通常,電機(jī)中的三個(gè)霍爾傳感器相互成60度角。也就是說,每隔60度其中一個(gè)傳感器就會(huì)變換其狀態(tài),完成一次電循環(huán)需要進(jìn)行6次狀態(tài)變換。在這種情況下,定子的相電流始于霍爾傳感器信號(hào)轉(zhuǎn)換后的30度,保持120度。為了使電機(jī)正常運(yùn)行,MCU的輸出模式(換流順序)應(yīng)當(dāng)依據(jù)輸入模式(轉(zhuǎn)子位置信號(hào))來確定,輸入轉(zhuǎn)子位置信號(hào)模式與輸出PWM模式相結(jié)合,即構(gòu)成換流表。
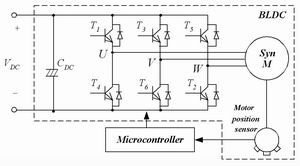
圖1 BLDC電機(jī)框圖
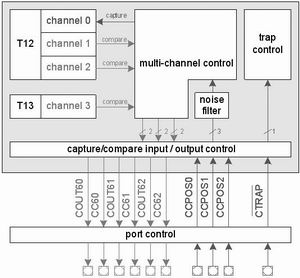
圖2 CAPCOM6E框圖
單片機(jī)C868和CAPCOM6E單元
C868是英飛凌公司8位單片機(jī)產(chǎn)品家族中的新成員,可為各種應(yīng)用和系統(tǒng)提供低成本的先進(jìn)控制功能。借助功能強(qiáng)大的片上PWM發(fā)生單元CAPCOM6E,C868滿足了對(duì)低成本、高實(shí)時(shí)性的電力電子控制的所有要求。利用靈活的CAPCOM6E,由硬件/軟件處理所有對(duì)時(shí)間要求十分苛刻的任務(wù),而CPU則處理用戶命令,并可進(jìn)行相應(yīng)的控制運(yùn)算。內(nèi)置的5通道8位ADC所具備的同步特性有助于測量無噪音相關(guān)的系統(tǒng)參數(shù)。
CAPCOM6E可驅(qū)動(dòng)多種類型的電機(jī)(交流異步電機(jī)IM、直流無刷電機(jī)BLDC和開關(guān)磁阻電機(jī)SRM等),它是基于此類PWM單元十多年的研發(fā)的最新成果。CAPCOM6E具備以下特性:
—T12具有三個(gè)捕捉/比較通道,每個(gè)通道有兩個(gè)輸出,可用作捕捉通道或比較通道,并且具備死區(qū)時(shí)間控制,可避免電源電路出現(xiàn)短路。T12有中心對(duì)齊、邊緣對(duì)齊、單脈沖觸發(fā)模式和滯環(huán)控制等控制模式。對(duì)于BLDC電機(jī)控制,通道1可用于捕捉速度,通道2可用作相位延遲,而通道3可用作超時(shí)功能。
—T13有一個(gè)獨(dú)立的比較通道和1路輸出,可生成高速PWM信號(hào),并控制占空比。T13也支持單脈沖觸發(fā)模式,可與T12同步。PWM信號(hào)可自動(dòng)迭加至T12的6路輸出中任何一路(或全部)的有效電平上。對(duì)于BLDC電機(jī)控制,通過T13 PWM的占空比調(diào)節(jié)電機(jī)速度。
如圖2所示,CC60-CC62和COUT60-COUT62是用于驅(qū)動(dòng)電機(jī)的6個(gè)基本輸出信號(hào)。對(duì)于BLDC電機(jī)控制,應(yīng)當(dāng)通過三個(gè)輸入口CCPOS0-CCPOS2(轉(zhuǎn)子位置反饋信號(hào))的狀態(tài)來控制輸出信號(hào)。T13生成的高頻PWM信號(hào)具有高達(dá)50ns的分辨率,加至T12的CC60-CC62和COUT60-COUT62輸出中的任何一個(gè)有效電平。CTRAP是緊急中斷輸入。如果該輸入為低,CC60-CC62和COUT60-COUT62將立即變?yōu)轭A(yù)定義的電平,以實(shí)現(xiàn)過流/過壓保護(hù)。用戶僅需設(shè)置各種寄存器的值,例如周期寄存器、比較寄存器、偏移寄存器等等,即可快捷地控制CAPCOM6E。
值得指出的是借助CAPCOM6E,用戶可通過軟件建立任何塊交換表(或狀態(tài)機(jī)),同時(shí)由硬件生成相應(yīng)的PWM輸出信號(hào)。這樣可以非常靈活地實(shí)現(xiàn)任何控制要求。下面的例子是以定義自制的塊交換表的源代碼。數(shù)組下標(biāo)HALL_PATTERNS_NUMBER 從0至5。
// Hall patterns
ubyte HallPatterns [HALL_PATTERNS_NUMBER]=
{
0x25, // Current=100 Expected=101
0x29, // Current=101 Expected=001
0x0b, // Current=001 Expected=011
0x1a, // Current=011 Expected=010
0x16, // Current=010 Expected=110
0x34, // Current=110 Expected=100
};
ubyte PWMPatterns[ HALL_PATTERNS_NUMBER]=
{
0x18, // U=0 V=- W=+ COUT62/CC62=01 COUT61/CC61=10 COUT60/CC60=00
0x12, // U=- V=0 W=+ COUT62/CC62=01 COUT61/CC61=00 COUT60/CC60=10
0x06, // U=- V=+ W=0 COUT62/CC62=00 COUT61/CC61=01 COUT60/CC60=10
0x24, // U=0 V=+ W=- COUT62/CC62=10 COUT61/CC61=01 COUT60/CC60=00
0x21, // U=+ V=0 W=- COUT62/CC62=10 COUT61/CC61=00 COUT60/CC60=01
0x09 // U=+ V=-W=0 COUT62/CC62=00 COUT61/CC61=10 COUT60/CC60=01
};
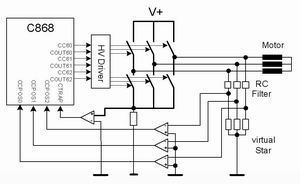
圖3 無傳感器C868 BLDC系統(tǒng)(a)利用外部比較器
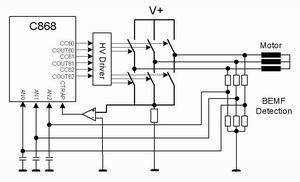
(b)利用A/D轉(zhuǎn)換器
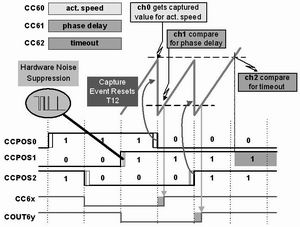
圖4 CAPCOM6E具備特殊功能用于BLDC電機(jī)控制
無傳感器的BLDC控制
在有些應(yīng)用中,不能使用霍爾傳感器或其它直接檢測轉(zhuǎn)子位置的方法,因此需要采用間接方法來檢測轉(zhuǎn)子位置。對(duì)于如圖3中所示的電機(jī)運(yùn)行,探測電機(jī)反電勢的過零點(diǎn)是獲得電機(jī)轉(zhuǎn)子位置最常見的方法。按照120度導(dǎo)電方式, 任何時(shí)間都有一相電機(jī)端子沒有外加電壓,因此可以在該相電機(jī)端子檢測電機(jī)反電勢來得知轉(zhuǎn)子位置。
在圖3(a)中,各個(gè)相位使用的霍爾傳感器用三個(gè)電阻分壓器和一個(gè)比較器替代。比較器向C868提供三個(gè)轉(zhuǎn)子位置信號(hào)。CAPCOM6E特別適用于這個(gè)解決方案,因?yàn)樗拿柯份斎刖幸粋€(gè)噪聲濾波器可抑制噪音,并具備相位延遲功能,可調(diào)節(jié)相位角度,如圖4所示。
如圖4所示,通過設(shè)置T12計(jì)時(shí)器的死區(qū)時(shí)間定時(shí)器,用戶可以定義噪音抑制窗口,通過設(shè)置T12通道1的比較值,用戶可以使T12輸出發(fā)生相位延遲,通過設(shè)置T12通道2的比較值,用戶可以了解有多長時(shí)間輸入沒有變化。T12通道0為捕捉模式,以測量實(shí)際速度。
在圖3(b)中,電機(jī)端子電壓可由C868的A/D轉(zhuǎn)換器檢測,A/D轉(zhuǎn)換可由T13溢出觸發(fā),通常,反電勢信號(hào)有很大噪音,進(jìn)行測量的最佳時(shí)機(jī)是在關(guān)閉電力電子開關(guān)的器件前的瞬間。此時(shí)正是T13溢出的時(shí)間。因此,每一次T13溢出均會(huì)觸發(fā)一次ADC測量。軟件僅須讀取該值并與預(yù)定義的閾值(過零點(diǎn))進(jìn)行比較。如果達(dá)到了該閾值點(diǎn),軟件將重設(shè)T12,以準(zhǔn)備下一個(gè)PWM狀態(tài)。當(dāng)相位延遲結(jié)束后(因?yàn)榉聪螂妱?dòng)勢BEMF過零點(diǎn)約比換流點(diǎn)提前30度),T12通道1的比較事件將觸發(fā)換流至下一個(gè)狀態(tài)。實(shí)驗(yàn)結(jié)果表明C868 BLDC系統(tǒng)的A/D方法是切實(shí)有效的。
結(jié)語
本文介紹了采用英飛凌公司最新推出的8位單片機(jī) C868及其功能強(qiáng)大、靈活自如的PWM發(fā)生單元CAPCOM6E實(shí)現(xiàn)無傳感器BLDC電機(jī)控制系統(tǒng)的方法。C868的CAPCOM6E具有一個(gè)用戶自定義的塊交換表(狀態(tài)機(jī)),其卓越的靈活性為用戶提供了很大應(yīng)用空間,可實(shí)現(xiàn)任何BLDC電機(jī)控制方案。C868所帶A/D轉(zhuǎn)換器的同步功能和CAPCOM6E的相位延遲功能可以進(jìn)行精確的無噪聲的反電勢測量。實(shí)驗(yàn)結(jié)果證明C868確實(shí)非常適合無傳感器BLDC電機(jī)控制。
- 電機(jī)控制(263705)
- BLDC(95561)
- 單片機(jī)C(12650)


聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請(qǐng)聯(lián)系本站處理。 舉報(bào)投訴
相關(guān)推薦
用于驅(qū)動(dòng)無傳感器 BLDC 電機(jī)的優(yōu)化控制方案
 4124
4124
對(duì)BLDC和PMS電機(jī)使用無傳感器矢量實(shí)現(xiàn)精確運(yùn)動(dòng)控制
3350003Plus, 51單片機(jī)BLDC有感和無感控制C代碼開源資料
51單片機(jī)控制直流無刷有霍爾電機(jī)的問題
BLDC無傳感器控制對(duì)外部器件的依賴怎么減少?
BLDC電機(jī) 直流無刷電機(jī) 120度HALL傳感器 12V額定電壓
BLDC電機(jī)控制必學(xué)知識(shí)點(diǎn)——角度傳感器
BLDC電機(jī)控制算法
BLDC電機(jī)控制算法最強(qiáng)解析,入門到進(jìn)階!
BLDC電機(jī)做無傳感器控制時(shí)要執(zhí)行經(jīng)歷的三個(gè)狀態(tài)
BLDC電機(jī)入門—— (2) BLDC電機(jī)的控制
BLDC|電機(jī)邁進(jìn)的“大無刷”時(shí)代
BLDC永磁同步電機(jī)無傳感器該如何去啟動(dòng)呢
傳感器發(fā)展助力提高BLDC電機(jī)控制性能
單片機(jī)控制電機(jī)的一本書
無傳感器BLDC電機(jī)控制怎么引入低成本應(yīng)用?
無傳感器控制基礎(chǔ)知識(shí)和要點(diǎn)
無傳感器無刷電機(jī)驅(qū)動(dòng)控制器系統(tǒng)簡介
無傳感器的變速控制5V三相BLDC風(fēng)扇電機(jī)
無刷直流(BLDC)電機(jī)解決方案
無電流傳感控制車用電機(jī)驅(qū)動(dòng)
Analog Devices:高效率,低成本,無傳感器電機(jī)控制
F281x BLDC3_2:無傳感器、BLDC 電機(jī)梯形控制相關(guān)問題?
L78/G1F 無傳感器BLDC電機(jī) 初始轉(zhuǎn)子位置檢測
LPC 1500 系列實(shí)現(xiàn) BLDC/PMSM 電機(jī)控制的技術(shù)
STC89C52單片機(jī)控制紅外傳感器
labview和單片機(jī)結(jié)合,控制步進(jìn)電機(jī)。
stm32壓力傳感器的步進(jìn)電機(jī)
《無刷直流電機(jī)控制應(yīng)用——基于STM8S系列單片機(jī)》
【文末有驚喜哦!】無位置傳感器的電機(jī)控制你知道嗎?看完這篇就懂了
【案例分享】無傳感器BLDC驅(qū)動(dòng)控制系統(tǒng)的設(shè)計(jì)
【設(shè)計(jì)技巧】想搞BLDC電機(jī)控制,就必須要懂的角度傳感器
一種大電流無傳感器BLDC電機(jī)控制器電路
什么是FOC?帶你看看無傳感器FOC的BLDC電機(jī)驅(qū)動(dòng)芯片及解決方案
使用 MSPM0 MCU 設(shè)計(jì)基于梯形的 BLDC 電機(jī)控制器
使用Arduino和電子速度控制器控制無感BLDC外轉(zhuǎn)子電機(jī)的速度
關(guān)于BLDC電機(jī)控制的所有信息:無傳感器無刷直流電機(jī)控制器
具有變速控制的 5V、三相無傳感器電機(jī)系統(tǒng)
具有無傳感器正弦控制的 12V BLDC 服務(wù)器風(fēng)扇
雙層60W無傳感器BLDC電機(jī)驅(qū)動(dòng)器包括BOM及層圖
含傳感器的BLDC電機(jī)梯形控制下載的程序能直接用嗎?
四軸飛行器無刷直流電機(jī)驅(qū)動(dòng)控制設(shè)計(jì)的實(shí)現(xiàn)
基于無傳感器磁場定位控制的三相無刷PMSM低電流電機(jī)控制解決方案包含BOM,BOM及光繪文件
基于MC56F8006專用電機(jī)控制設(shè)備的無傳感器三相無刷直流電機(jī)驅(qū)動(dòng)器的設(shè)計(jì)
基于PSoC4的無傳感器BLDC控制
基于S12ZVM的車用BLDC無傳感控制方案
基于S12ZVM的車用無傳感器BLDC堵轉(zhuǎn)檢測方法探討
基于STM32無位置傳感器無刷直流電機(jī)控制C程序
多個(gè)永磁電機(jī)的無傳感器磁場定向控制
如何實(shí)現(xiàn)ST72141無傳感器控制的BLDC電機(jī)轉(zhuǎn)子堵轉(zhuǎn)
如何使用霍爾傳感器來控制三相BLDC電機(jī)的速度呢?
如何去實(shí)現(xiàn)基于單片機(jī)霍爾電機(jī)測速儀表控制系統(tǒng)設(shè)計(jì)
如何將無傳感器BLDC電機(jī)控制引入低成本應(yīng)用
如何消除BLDC電機(jī)控制中的霍爾傳感器?
如何用傳感器控制步進(jìn)電機(jī),51單片機(jī)
如何驅(qū)動(dòng)帶傳感器的(HALL) BLDC電機(jī)?
將無傳感器BLDC電機(jī)控制引入低成本應(yīng)用
帶傳感器的無刷電機(jī)BLDC低功耗單片機(jī)芯片EN8P2712—深圳單片機(jī)開發(fā)方案公司英銳恩
應(yīng)用于白家電的無刷直流(BLDC)電機(jī)驅(qū)動(dòng)及控制方案
微型無刷直流電機(jī)的無位置傳感器控制
怎么實(shí)現(xiàn)基于STM32的反電動(dòng)勢無傳感BLDC控制?
案例分享:無位置傳感器的電機(jī)控制
求51單片機(jī)利用傳感器控制步進(jìn)電機(jī)
深圳無刷電機(jī)控制器單片機(jī)芯片—EN8F156
用單片機(jī)實(shí)現(xiàn)的脈沖編碼傳感器設(shè)計(jì)
用AT89C51單片機(jī)怎么實(shí)現(xiàn)通過傳感器傳遞信號(hào)給單片機(jī),處理后驅(qū)動(dòng)步進(jìn)電機(jī)運(yùn)停
直流無刷電機(jī)開發(fā)套件201210KIT_BLDC
給大家推薦一款:無需軟件編程的FOC無傳感器BLDC電機(jī)控制器 AMT49406
角度傳感器在BLDC電機(jī)控制中的作用
請(qǐng)教:在分析英飛凌C868及IR公司IR2136控制無刷電機(jī)電路中遇到的問題
請(qǐng)問是否可以提供應(yīng)用于DRV8303Evm的“使用霍爾傳感器的BLDC電機(jī)控制”示例程序?
轉(zhuǎn):如何使用低成本單片機(jī)驅(qū)動(dòng)單繞組單相無刷直流電機(jī)
采用56F801X DSC的霍爾傳感器參考設(shè)計(jì)的三相BLDC電機(jī)控制
采用56F801X的3相無刷直流電機(jī)無傳感器控制參考設(shè)計(jì)
采用MPC5643L MCU參考設(shè)計(jì)的3相無傳感器BLDC套件
無傳感器的BLDC電機(jī)控制
 69
69用dsPIC30F2010控制無傳感器的BLDC電機(jī) AN9
117dsPIC30F在無傳感器BLDC控制中的應(yīng)用
76將無傳感器BLDC電機(jī)控制引入低成本應(yīng)用
1746
基于PIC32MM單片機(jī)的BLDC電機(jī)控制解決方案
6012
使用PIC32MM系列32位單片機(jī)的BLDC電機(jī)控制解決方案
5911使用dsPIC30F2010控制帶傳感器的BLDC電機(jī)
23單片機(jī)C868實(shí)現(xiàn)無傳感器BLDC電機(jī)控制
24- 設(shè)計(jì)技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測量儀表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無線
- 接口/總線/驅(qū)動(dòng)
- 處理器/DSP
- EDA/IC設(shè)計(jì)
- 存儲(chǔ)技術(shù)
- 光電顯示
- EMC/EMI設(shè)計(jì)
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實(shí)
- 可穿戴設(shè)備
- 機(jī)器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動(dòng)通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專欄推薦
- 學(xué)院
- 設(shè)計(jì)資源
- 設(shè)計(jì)技術(shù)
- 電子百科
- 電子視頻
- 元器件知識(shí)
- 工具箱
- VIP會(huì)員
- 最新技術(shù)文章
- 社區(qū)
- 小組
- 論壇
- 問答
- 評(píng)測試用
- 企業(yè)服務(wù)
- 產(chǎn)品
- 資料
- 文章
- 方案
- 企業(yè)
- 供應(yīng)鏈服務(wù)
- 硬件開發(fā)
- 華秋電路
- 華秋商城
- 華秋智造
- nextPCB
- BOM配單
- 媒體服務(wù)
- 網(wǎng)站廣告
- 在線研討會(huì)
- 活動(dòng)策劃
- 新聞發(fā)布
- 新品發(fā)布
- 小測驗(yàn)
- 設(shè)計(jì)大賽
- 華秋
- 關(guān)于我們
- 投資關(guān)系
- 新聞動(dòng)態(tài)
- 加入我們
- 聯(lián)系我們
- 舉報(bào)投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動(dòng)端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:[email protected]
- 內(nèi)容合作
- 黃晶晶:[email protected]
- 內(nèi)容合作(海外)
- 張迎輝:[email protected]
- 供應(yīng)鏈服務(wù) PCB/IC/PCBA
- 江良華:[email protected]
- 投資合作
- 曾海銀:[email protected]
- 社區(qū)合作
- 劉勇:[email protected]
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論