 電子發(fā)燒友App
電子發(fā)燒友App


正弦脈沖寬度調(diào)制SPWM的實(shí)現(xiàn)有多種方法。SPWM控制方法從采用模擬電路到全數(shù)字化方案,完成優(yōu)化的實(shí)時(shí)在線的SPWM信號(hào)輸出,對(duì)于不同的波形,其調(diào)制處理芯片的算法、頻率輸出范圍、波形產(chǎn)生機(jī)理等方面有很大的不同。本文首先介紹了SPWM原理,其次闡述了spwm控制的基本原理,最后詳細(xì)的介紹了spwm控制方法,具體的跟隨小編一起來(lái)了解一下。
SPWM原理
正弦PWM的信號(hào)波為正弦波,就是正弦波等效成一系列等幅不等寬的矩形脈沖波形,其脈沖寬度是由正弦波和三角波自然相交生成的。正弦波波形產(chǎn)生的方法有很多種,但較典型的主要有:對(duì)稱(chēng)規(guī)則采樣法、不對(duì)稱(chēng)規(guī)則采樣法和平均對(duì)稱(chēng)規(guī)則采樣法三種。第一種方法由于生成的PWM脈寬偏小,所以變頻器的輸出電壓達(dá)不到直流側(cè)電壓的倍;第二種方法在一個(gè)載波周期里要采樣兩次正弦波,顯然輸出電壓高于前者,但對(duì)于微處理器來(lái)說(shuō),增加了數(shù)據(jù)處理量當(dāng)載波頻率較高時(shí),對(duì)微機(jī)的要求較高;第三種方法應(yīng)用最為廣泛的,它兼顧了前兩種方法的優(yōu)點(diǎn)。SPWM雖然可以得到三相正弦電壓,但直流側(cè)的電壓利用率較低,最大是直流側(cè)電壓的倍,這是此方法的最大的缺點(diǎn)。
spwm控制的基本原理
SPWM法是一種比較成熟的、目前使用較廣泛的PWM法。SPWM就是以采樣控制理論中的沖量等效原理為理論依據(jù)的(沖量相等而形狀不同的窄脈沖加在具有慣性的環(huán)節(jié)上時(shí),其效果基本相同)。用脈沖寬度按正弦規(guī)律變化而和正弦波等效的PWM波形即SPWM波形控制逆變電路中開(kāi)關(guān)器件的通斷,使其輸出的脈沖電壓的面積與所希望輸出的正弦波在相應(yīng)區(qū)間內(nèi)的面積相等,通過(guò)改變調(diào)制波的頻率和幅值則可調(diào)節(jié)逆變電路輸出電壓的頻率和幅值。
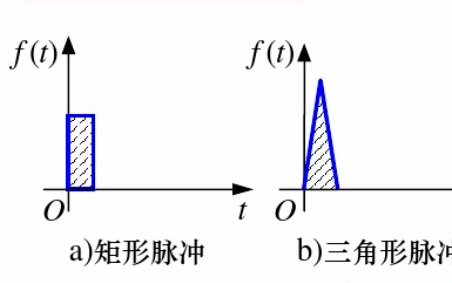
在采樣控制理論中有一個(gè)重要的結(jié)論:沖量相等而形狀不同的窄脈沖加在具有慣性的環(huán)節(jié)上,其效果基本相同。沖量指窄脈沖的面積。效果基本相同指環(huán)節(jié)的輸出響應(yīng)波形基本相同。如把各輸出波形用傅氏變換分析,則其低頻特性非常接近,僅在高頻段略有差異。這一結(jié)論是PWM控制的重要理論基礎(chǔ)。如圖1(a)所示,將正弦半波看成由N個(gè)彼此相聯(lián)的脈沖組成的波形。這些脈沖寬度相等,但幅度不等,且脈沖的頂部為曲線,各脈沖的幅值按正弦規(guī)律變化。如果將上述脈沖序列用同樣數(shù)量的等幅不等寬的矩形脈沖序列代替,使矩形脈沖的中點(diǎn)和相應(yīng)正弦波部分的中點(diǎn)重合,且使矩形脈沖和相應(yīng)的正弦波部分面積相等,就得到圖1(b)所示的脈沖序列。像這種脈沖寬度按正弦規(guī)律變化而和正弦波等效的波形即為SPWM波形。
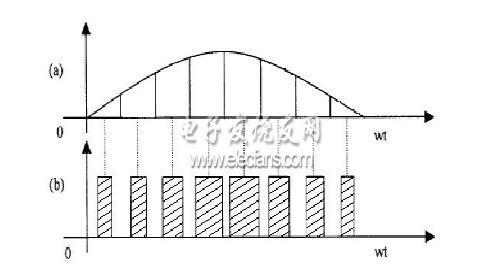
圖1PWM控制的基本原理圖
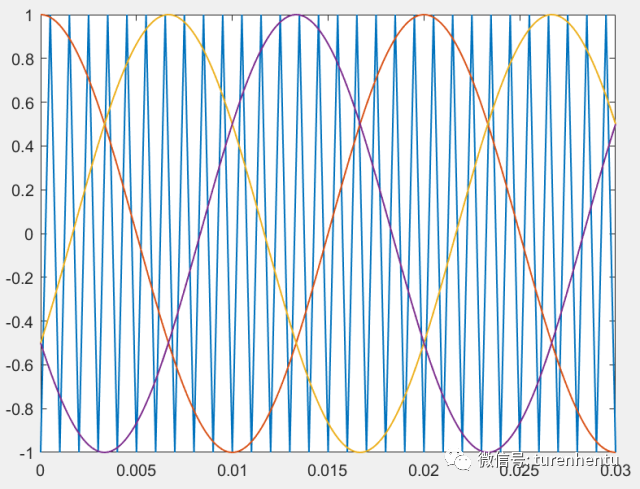
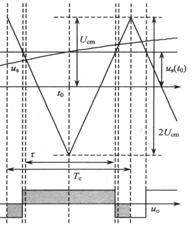
得到SPWM的具體實(shí)現(xiàn)方法可以是用一個(gè)正弦調(diào)制波和一個(gè)等腰三角載波相交,由它們的交點(diǎn)確定逆變器的開(kāi)關(guān)模式。如圖2所示,正弦波大于三角波時(shí),使相應(yīng)的開(kāi)關(guān)器件導(dǎo)通;當(dāng)正弦波小于三角載波時(shí),使相應(yīng)的開(kāi)關(guān)器件截止。
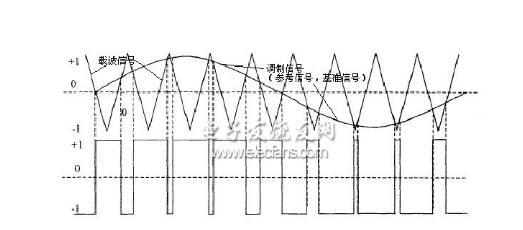
圖2SPWM控制的基本原理圖
spwm控制方法有哪些
一、SPWM的模擬控制方法
早期的通用變頻器都采用模擬控制方法。三相對(duì)稱(chēng)的參考正弦電壓調(diào)制信號(hào)由參考信號(hào)發(fā)生器提供(其頻率和幅值均可調(diào)),三角載波信號(hào)由三角波發(fā)生器提供(各相共用)。它分別與各相的調(diào)制信號(hào)在比較器上進(jìn)行比較,給出“正”或“零”的飽和輸出,產(chǎn)生SPWM脈沖序列波,作為變壓壓變頻器功率開(kāi)關(guān)器件的驅(qū)動(dòng)
信號(hào)。通常情況下,單極性SPWM多采用單極性的載頻三角波,雙極性SPWM則采用雙極性的載頻三角波。
二、SPWM的軟件控制方法
軟件控制法是由微型計(jì)算機(jī)來(lái)實(shí)現(xiàn)SPWM控制的方法,是目前經(jīng)常采用的一種方法。根據(jù)其軟件化方法的不同,有如下幾種
1、表格法(又稱(chēng)ROM法):
這種方法是預(yù)先將SPWM波的數(shù)據(jù)計(jì)算出來(lái)并存入ROM中,然后根據(jù)調(diào)頻指令再將這些數(shù)據(jù)順序取出,由輸出口輸出來(lái)控制逆變器的開(kāi)關(guān)動(dòng)作。表格法的缺點(diǎn)是占用大量的內(nèi)存,且無(wú)實(shí)時(shí)處理功能
2、隨時(shí)計(jì)算法(又稱(chēng)RAM法):
這種方法的特點(diǎn)是在ROM中預(yù)先存儲(chǔ)一個(gè)單位基準(zhǔn)正弦波,運(yùn)行時(shí),根據(jù)指令值的要求,按不同載波比和調(diào)幅比的要求,計(jì)算出一個(gè)周期的開(kāi)關(guān)模式和開(kāi)關(guān)模式保持的時(shí)間值,寫(xiě)入RAM1中。一旦計(jì)算結(jié)束,就把RAM1的數(shù)據(jù)輸出。在RAMl的數(shù)據(jù)輸出期間,如
指令值發(fā)生了新的變化,則開(kāi)始重新計(jì)算,但將計(jì)算結(jié)果寫(xiě)入RAM2中。寫(xiě)入RAM2的操作一旦結(jié)束,就轉(zhuǎn)為將RAM2的數(shù)據(jù)輸出。再有新的指令值時(shí),則將計(jì)算結(jié)果寫(xiě)入RAM1中。如此輪流地使用兩個(gè)RAM。這種方法雖然不必使用大量的ROM,但也沒(méi)有實(shí)時(shí)處理功能,動(dòng)態(tài)響應(yīng)時(shí)間較慢。
3、實(shí)時(shí)計(jì)算法:
實(shí)時(shí)計(jì)算要有數(shù)學(xué)模型。建立數(shù)學(xué)模型的方法有許多種,如等效面積法、自然采樣法和規(guī)則采樣法。而規(guī)則采樣法中又有對(duì)稱(chēng)規(guī)則采樣法與不對(duì)稱(chēng)規(guī)則采樣法。
(1)等效面積法:
其生成原理就是按面積相等的原則構(gòu)成與正弦波等效的一系列等幅不等寬的矩形脈沖波形。根據(jù)已知數(shù)據(jù)和正弦數(shù)值可以依次算出每個(gè)脈沖的寬度。這是實(shí)時(shí)控制中最簡(jiǎn)單的算法。
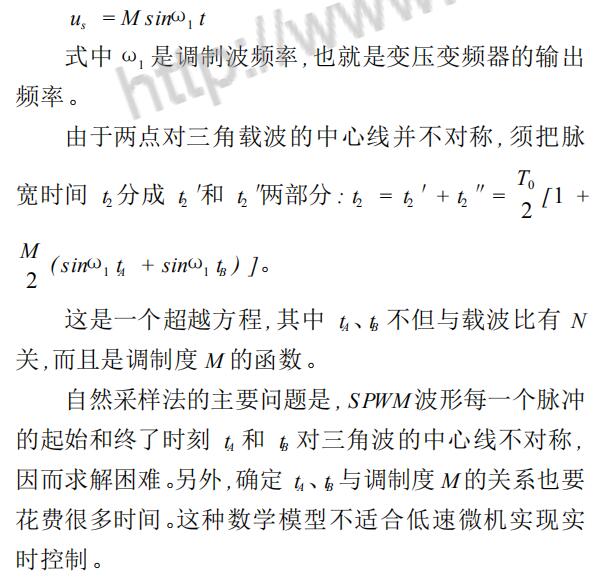
(2)自然采樣法:
自然采樣法(NaturalSampling)移植了模擬控制的方法,計(jì)算正弦調(diào)制波與三角載波的交點(diǎn),從而求出相應(yīng)的脈寬和脈沖間歇時(shí)間,生成SPWM波形。若以單位量1代表三角載波的幅值,則正弦調(diào)制波的幅值就是調(diào)制度M,正弦調(diào)制波可寫(xiě)作
(3)規(guī)則采樣法(RegularSampling):
工程上實(shí)用的方法要求算法簡(jiǎn)單,只要誤差不太大,允許作出一些近似處理,這樣就提出了各種規(guī)則采樣法。規(guī)則采樣法是在三角載波每一周期的正峰值時(shí)找到正弦調(diào)制波上的對(duì)應(yīng)點(diǎn),求得電壓值,用此電壓值對(duì)三角波進(jìn)行采樣,得到兩點(diǎn)。可以認(rèn)為它們就是SPWM波形中脈沖的生成時(shí)刻,其區(qū)間就是脈寬時(shí)間t2。
規(guī)則采樣法的計(jì)算顯然比自然采樣法簡(jiǎn)單,但由于采樣水平線與三角載波的交點(diǎn)都處于正弦波的同一側(cè)造成的,所得的脈沖寬度將明顯地偏小,從而造成控制誤差規(guī)則采樣法的實(shí)質(zhì)是采用階梯波來(lái)代替正弦波,從而簡(jiǎn)化了計(jì)算方法。只要載波比N足夠大,不同的階梯波都很逼近正弦波,所造成的誤差就可以忽略不計(jì)了。
通用變頻器多是三相的,因此還應(yīng)形成三相的SP2WM波形。三相正弦調(diào)制波在時(shí)間上互差120°,而三角載波是共用的,這樣就可在同一個(gè)三角載波周期內(nèi)獲得三相SPWM脈沖波形。用計(jì)算機(jī)實(shí)時(shí)產(chǎn)生SPWM波形正是基于上述的采樣原理和計(jì)算公式。一般可以把由查表法或?qū)崟r(shí)計(jì)算法所得的脈沖數(shù)據(jù)都送入定時(shí)器,利用定時(shí)中斷向接口電路送出相應(yīng)面的高、低電平,以實(shí)時(shí)產(chǎn)生SPWM波形的一系列脈沖。對(duì)開(kāi)環(huán)控制系統(tǒng),在某一給定轉(zhuǎn)速下其調(diào)制度M與頻率ω1都是確定值,所以宜采用查表法。對(duì)于閉環(huán)控制的調(diào)速系統(tǒng),在系統(tǒng)運(yùn)行中調(diào)制度M值須隨時(shí)被調(diào)節(jié),所以用實(shí)時(shí)計(jì)算法更為適宜。為了實(shí)現(xiàn)閉環(huán)控制,既可采用多CPU系統(tǒng),也可采用16位機(jī)或32位機(jī)。














 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論