 電子發燒友App
電子發燒友App


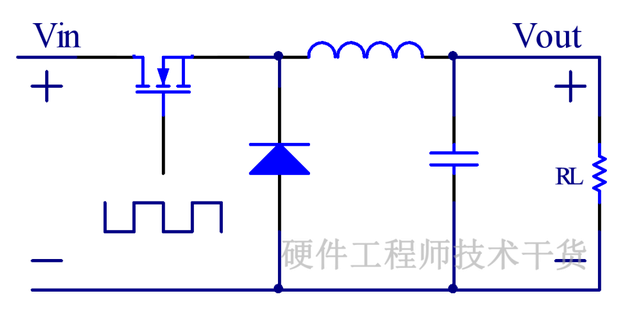
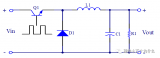
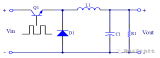
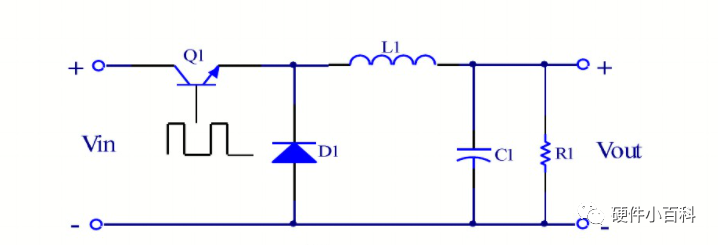
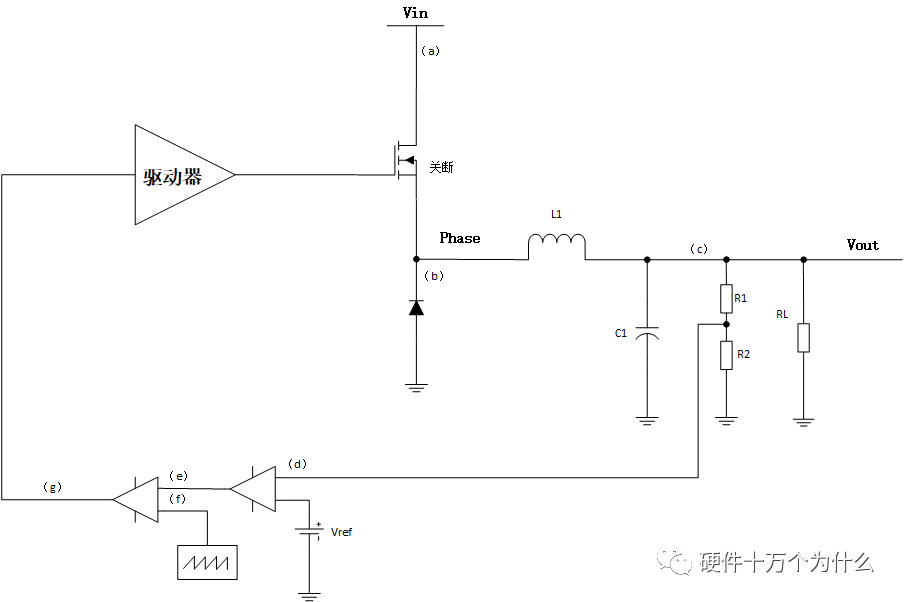
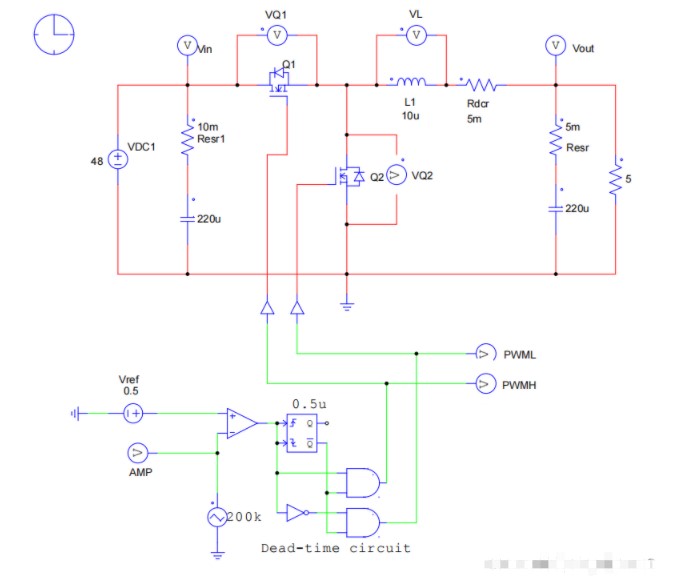
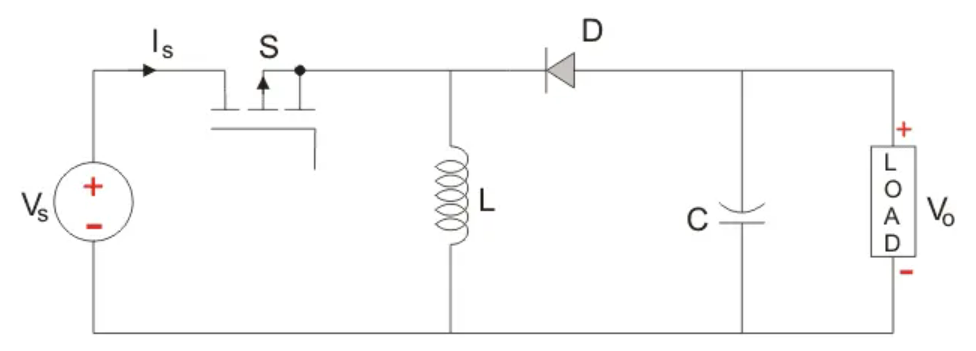
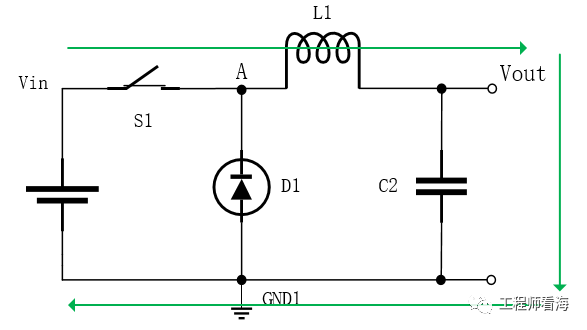
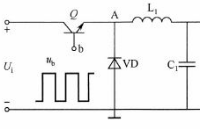
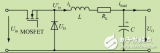
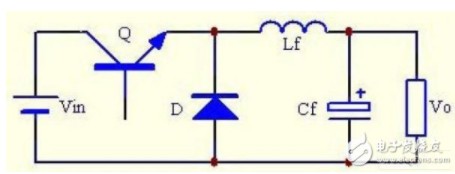
下圖分別是(左)異步BUCK與 (右)同步BUCK電路示意圖。
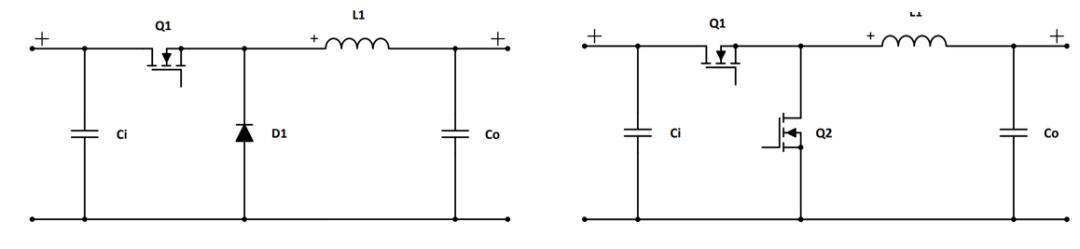
我們都知道BUCK是通過控制開關管導通和關斷把輸入的能量傳遞到輸出。
同步VS異步:異步BUCK下管是二極管,同步BUCK下管為MOS管。 由于MOS的導通電阻Rds_on小(約10~20mΩ),二極管壓降為0.7V左右,當續流電流有效值為10A,續流期間同步BUCK帶來的導通損耗約是異步BUCK的三分之一。 因此,我們看到一般BUCK芯片如果是異步BUCK,二極管都會外置,不然芯片的損耗太大會使整體效率降低。
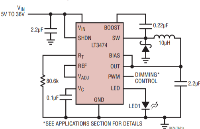
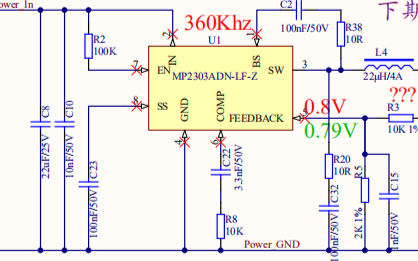
接下來我們以TI的一個36V/3A的同步BUCK -LMR23630 為例 一步步帶大家了解BUCK的設計過程。
Step 1---簡單看看BUCK數據手冊:了解LMR23630芯片基本功能。
?
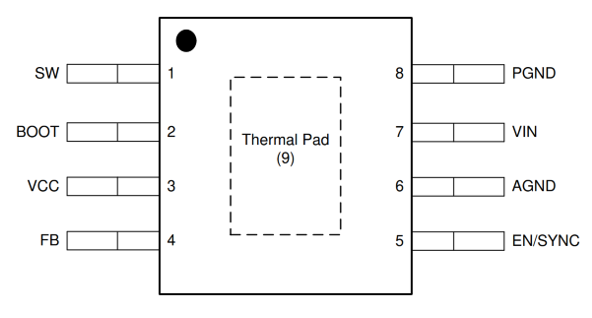
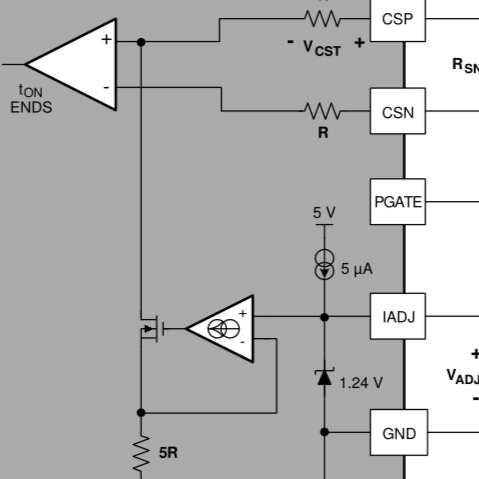
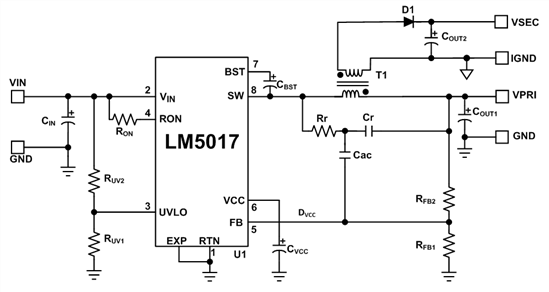
我們看SOIC-8封裝左側的四個引腳: SW、 BOOT、 VCC、 FB:
Pin1 SW:上管和下管的中點,SW接輸出濾波電感后接輸出電容。 一般排查BUCK工作是否OK需要看SW波形是否正常switching。
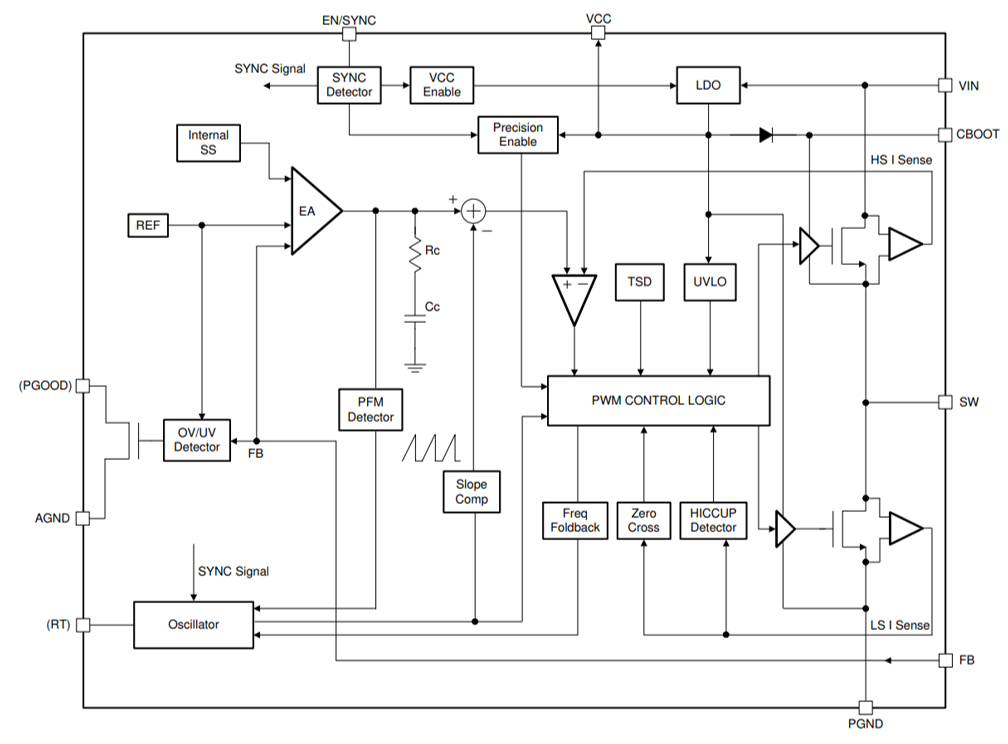
Pin2 BOOT:用來給上管關斷時,DS兩端提供穩定電壓。 當下管斷開,SW浮地,驅動打開上管需要上管的driver供電與上管DS通過CBOOT(自舉電容)建立VCC的電壓。 別迷糊,從block可以看到,VIN通過芯片內部LDO給上下管的driver供電,同時鉗位上管DS電壓,也即是說當上管的DS電壓穩定后,給上管柵極一個驅動電壓Vgs大于零后,上管才能打開。
Pin3 VCC:就是給內部邏輯和driver供電的LDO輸出的引腳,需要加電容對地。
Pin4 FB:反饋腳,通過上篇BUCK控制模式中的PCM控制閱讀后,(BUCK控制 加連接)我們知道FB是誤差放大器的輸入,把輸出電壓反饋給EA做閉環控制,因此一般BUCK在正常工作的時候,FB電壓等于內部基準電壓,輸出電壓也通過FB電壓進行分壓計算。
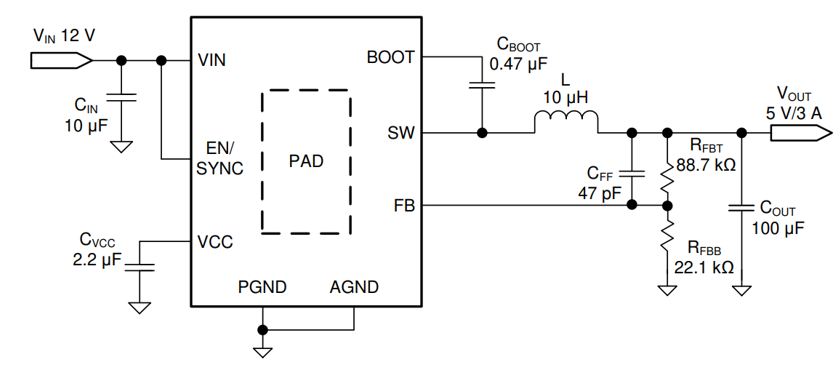
1.輸入電容CIN:
a.輸入電容決定輸入電壓紋波ΔVin。
CIN=Iout/(4ΔVinfsw),ΔVin一般取10%Vin
b.由輸入電流有效值公式:Icin_rms=Iout[D(1-D)]^0.5 可知,D=0.5時,輸入電容電流的紋波最大:Icin_rms(max)=0.5Iout
因此對于CIN 選擇RMS額定電流值大于0.5Iout即可。
實際案例探討:對于建議輸入電容值較大(22uF/47uF)的應用,建議采用多個輸入陶瓷電容并聯會讓輸入電容整體ESR更小,從而減小熱損耗。
2.CVCC電容:
內部LDO對地的電容,越大LDO供電越穩定,意味著給MOS driver供電電源越穩定,但是太大也會讓內部邏輯部分和MOS driver供電電源建立的變慢。 需要根據不同應用綜合考慮。
實際案例探討:30V轉15V場合下,此時輸入電容的電流在上管開通時階躍最大,如果測試發現BUCK啟動瞬間VCC對AGND超數據手冊規格(4.5V),適當增加VCC對AGND電容可以有效減小VCC對GND啟動時的電壓尖峰。
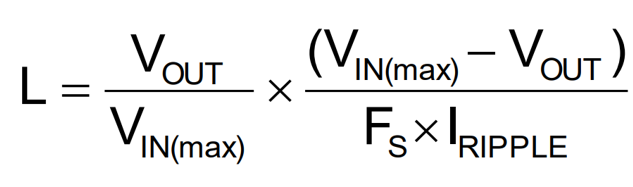
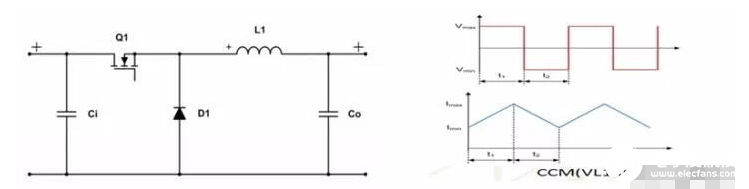
3.輸出電感:
輸出濾波電感用來儲存能量并且對輸出電流進行濾波。根據以下輸出電感和輸出電流紋波的公式可計算電感感值,一般IRIPPLE取10%~30%的IOUT。
實際案例探討:Q:輸出電感可不可以是數據手冊建議值的10倍,20倍? 電感越大是不是電流濾波的效果越好? A:實際無論是輸出電感還是輸出電容都絕不是越大越好!! BUCK Bode圖中,主極點由輸出LC決定。 (對系統環路穩定性有懵比的朋友可以回頭看 環路穩定 插入鏈接),簡化主極點是1/[2π(LC)^0.5],當LC取值過大,會導致系統的帶寬變小,響應速度變慢,大的過分甚至會導致工作異常。
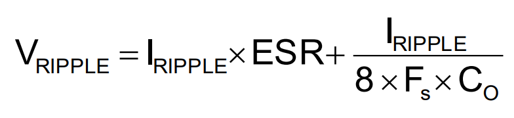
4.輸出電容:
輸出電容儲存能量穩定電壓并且對輸出電壓濾波,根據以下輸出電容和輸出電壓紋波的公式可以計算電容容值,一般ESR值很小,可以忽略。
實際案例探討:輸出電容可以采用電解電容么?? 我們知道電解電容的ESR大,“衰老”的速度也比較快,占地面積也大,現在的數據手冊中多數建議采用陶瓷電容。 有的數據手冊并沒有明確指出輸出電容類型。 我們可以知道的是輸出電容的建議值是降額之后的值,并且除了輸出電壓紋波之外其建議值和環路穩定性以及響應特性相關。 實際輸出電容種類并不重要,重要的是電容容值合理,建議不超過數據手冊建議值的3倍。
5.開機:
自舉電容的容值決定了給上管DS和其driver 供電電源充電的時間和穩定性。 一般情況下可以預取建議值,再根據具體工況調整,CBOOT可預留一個串聯的電阻位置,用來調整上管開關速度來降低EMI。
實際案例探討:如在啟動中,CBOOT對SW存在電壓過沖,可以適當增大CBOOT容值,增加電源穩定性。 還可以通過串聯電阻降低上管開關速度,也可以降低CBOOT對SW電壓過沖。
6.CFF:
反饋電容從時域上理解即把輸出更快的反饋到FB,從而增加系統響應速度。
以上理解了BUCK芯片的工作模式以及基本引腳的功能后,就可以合理靈活的設計BUCK電路。












 工商網監
工商網監
評論