 電子發燒友App
電子發燒友App


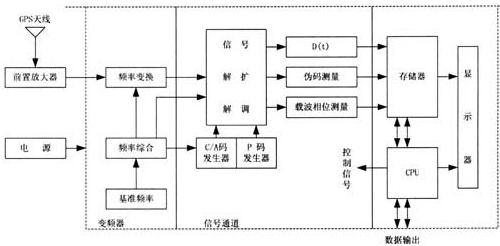
相關器單元
對于與GP2015的組合匹配電路,GP2021接收來自GP2015的40MHz的差分時鐘信號、MAGO、SIGO 、PLLRDY和PRESET信號。將GP2015和GP2021的差分時鐘引腳直接相連;MAGO、SIGO及CLK采用串聯端接電阻,減少信號的反射。設計GP2015與GP2021接口電路原理圖如圖6所示。

微控制器單元
選用TMS320C6747對GP2021進行讀操作和寫操作,獲取導航數據及控制GP2021的信號捕獲和跟蹤過程。GP2021提供了多種標準接口方式與C6747進行通信,包括ARM6、Motorola、 Intel486 、Intel80186的接口,接口的配置取決于GP2021片上標號為NARMSYS,WRPROG及NINTELMOT的引腳高低電平的組合邏輯,如表1所示。

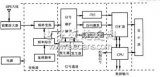
可以將GP2021等價為異步隨機存儲器,采用C6747的外部存儲器接口EMIFA與GP2021進行匹配。C6747的EMIFA接口包含3根控制線,13根地址線,16根數據線。將EMIFA的片選EMA_CS [3]與NCS相連,它的地址空間為0x62000000-0x63FFFFFF。EMIFA中其他的引腳就按功能進行相連。由于GP2021與C6747的地址總線、數據總線和控制總線的引腳都支持LVTTL,所以無需電平轉換就可直接相連,不會出現邏輯錯誤。通過設置C6747中EMIFA接口片選信號EMA_CS的READ_SETUP、READ_STROBE、READ_HOLD、WRITE_SETUP、WRITE_STROBE、TA、WRITE_HOLD的時間就可以實現與GP2021數據傳輸。
另外GP2021中ACCUM_INT引腳輸出一個間隔505.05us的信號,保證GP2021與C6747之間的接口正常傳輸。C6747內增強型的TIMER定時器具有通過TIMER外部時鐘輸入引腳捕獲外部輸入事件的功能。由此將TIMER的時鐘輸入引腳直接與ACCUM_INT相連。所以C6747與GP2021接口電路如圖7所示。

編輯點評:本設計經過單片機控制超聲波諧振電路的頻率和負載功率,結合GPS接收機硬件和軟件進行了導航電文譯碼測試,成功地實現了對GPS衛星的捕獲和跟蹤。以GP2015、GP2021芯片組為核心架構,以C6747為相關計算處理器的GPS硬件電路設計,充分考慮了低功耗、高性能及小封裝的彈載環境要求;以常用信號捕獲算法為基礎,給出了GPS定位軟件的核心流程框圖。













 工商網監
工商網監
評論