") Facebook:有意讓機(jī)器人“犯錯(cuò)誤”,明知故犯是“智”也
Facebook:有意讓機(jī)器人“犯錯(cuò)誤”,明知故犯是“智”也
人類(lèi)就是通過(guò)好奇心來(lái)認(rèn)識(shí)世界,機(jī)器人也可以。
在人們意識(shí)當(dāng)中,機(jī)器人按照開(kāi)發(fā)者的意愿而做出指定的動(dòng)作似乎是一件理所應(yīng)當(dāng)?shù)氖拢遥瑱C(jī)器人完成任務(wù)還要做到精準(zhǔn)、迅速。然而,F(xiàn)acbook 的研究人員卻不走尋常路,他們有意讓機(jī)器人“犯錯(cuò)誤”,這到底是為什么呢?
讓我們一起來(lái)看看吧。
明知故犯是“智”也
在 Facebook 位于硅谷的新實(shí)驗(yàn)室里,有一個(gè)叫作 Sawyer 的機(jī)器人(來(lái)自已經(jīng)倒閉的 Rethink Robotics 公司),它紅黑相間的手臂揮舞著,試圖完成研究人員交給它的任務(wù)。
按照指令,Sawyer 的手臂應(yīng)該移動(dòng)到右邊一處固定位置,然而,Sawyer 把手臂抬高,然后偏離軌道,錯(cuò)開(kāi)了指定位置,重新回到了原點(diǎn);研究人員只好將 Sawyer 重置,讓它繼續(xù)完成之前的任務(wù)。這一次,Sawyer 的手臂確實(shí)往右移了,但就在非常接近指定位置的時(shí)候,它再一次偏離了運(yùn)動(dòng)軌道,回到了起始位置。兩次任務(wù)都失敗了。
或許有人會(huì)覺(jué)得 Sawyer 的“頑劣”行為令人抓狂。但就像兔子為了躲避獵鷹而迂回前進(jìn)一樣,Sawyer 看似笨拙的行為實(shí)際上是一種特殊的聰明。
Facebook 認(rèn)為,無(wú)論是對(duì)于機(jī)器人的開(kāi)發(fā),還是 AI 的開(kāi)發(fā)來(lái)說(shuō),這種聰明都至關(guān)重要。
強(qiáng)化學(xué)習(xí)讓機(jī)器人更“聰明”
一般來(lái)說(shuō),開(kāi)發(fā)者會(huì)編程機(jī)器人,讓他們通過(guò)這些設(shè)定好的指令來(lái)執(zhí)行動(dòng)作,不過(guò)從某種程度上來(lái)說(shuō),這種方式有點(diǎn)死板。
而我們?nèi)祟?lèi)在學(xué)習(xí)上則要聰明得多。因?yàn)椋词故菋雰阂裁靼祝矬w從視野中消失并不代表從世界上消失;玩具球可以滾來(lái)滾去,沙發(fā)卻不行;長(zhǎng)大后,人們能夠?qū)W習(xí)駕駛,而不是撞車(chē)。
這一切都要?dú)w功于人類(lèi)大腦里建立起來(lái)的世界模型。
Facebook 首席 AI 科學(xué)家 Yann LeCun 表示:
如果我們?cè)趹已逻呴_(kāi)車(chē),方向盤(pán)只要往右轉(zhuǎn),汽車(chē)就會(huì)掉下去,所以,我們絕不會(huì)這樣做。我們大腦里的世界模型會(huì)阻止我們自己做傻事。
Facebook 也在嘗試為機(jī)器提供這種模式,Yann LeCun 補(bǔ)充道說(shuō),建立世界模型的系統(tǒng)是 AI 取得重大進(jìn)展的下一個(gè)挑戰(zhàn)。
實(shí)際上,F(xiàn)acebook 并不是第一個(gè)嘗試讓機(jī)器人學(xué)會(huì)自我移動(dòng)的團(tuán)隊(duì)。
雷鋒網(wǎng)注:上圖為 Brett 機(jī)器人及其開(kāi)發(fā)者Pieter Abbeel
在加州大學(xué)伯克利分校,研究人員使用了一種名為強(qiáng)化學(xué)習(xí)(reinforcement learning)的技術(shù),讓雙臂機(jī)器人 Brett 把方形釘子塞進(jìn)一個(gè)方形洞里。
在此過(guò)程中,研究人員會(huì)讓 Brett 嘗試許許多多隨機(jī)的動(dòng)作:如果 Brett 更接近目標(biāo),系統(tǒng)就會(huì)給它“獎(jiǎng)勵(lì)”;如果 Brett 搞砸了,系統(tǒng)會(huì)給它“記過(guò)”。
這些記錄,Brett 都會(huì)保存下來(lái),然后經(jīng)過(guò)多次迭代,它會(huì)越來(lái)越精準(zhǔn)地找到方洞,并把釘子放進(jìn)去。
創(chuàng)新的自我監(jiān)督學(xué)習(xí)
而 Facebook 的嘗試有點(diǎn)不同,F(xiàn)acebook AI 研究科學(xué)家 Franziska Meier 表示:
我們想嘗試的是給機(jī)器人灌輸好奇心的概念。
人類(lèi)就是通過(guò)好奇心來(lái)認(rèn)識(shí)世界的,比如,孩子們想知道猛拽貓尾巴會(huì)發(fā)生什么,所以他們會(huì)去做這種嘗試。因此,Brett 是通過(guò)一點(diǎn)一點(diǎn)地靠近目標(biāo),來(lái)改進(jìn)自己的動(dòng)作,而 Facebook 的 Sawyer 則是靠近目標(biāo),然后故意偏離軌道。
Facebook 研究人員旨在讓 Sawyer 自由地嘗試非最佳動(dòng)作,而不是獎(jiǎng)勵(lì)它不斷取得的成功,即使這在當(dāng)時(shí)看起來(lái)并不理性。Meier 說(shuō):
雖然 Sawyer 沒(méi)有完成任務(wù),但它給了我們更多的數(shù)據(jù),我們通過(guò)這種方式獲得的數(shù)據(jù)比傳統(tǒng)的方式要多。
這個(gè)概念被稱為自我監(jiān)督學(xué)習(xí)——機(jī)器人嘗試新行為并更新軟件模型,從而幫助它預(yù)測(cè)自己的行為后果。
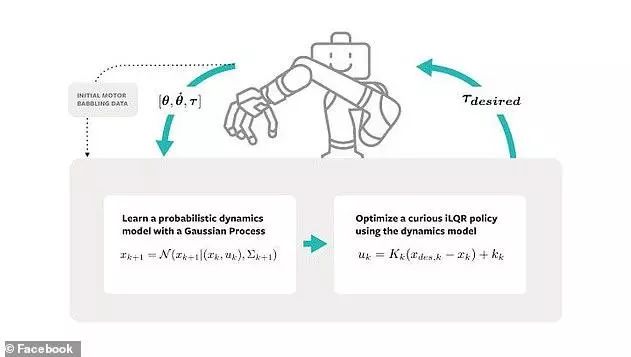
上圖為 Facebook 所說(shuō)的“自我監(jiān)督學(xué)習(xí)”的算法模型
這樣做的目的是讓機(jī)器能夠更加靈活地去完成任務(wù),或者說(shuō),更容易適應(yīng)動(dòng)態(tài)的人類(lèi)環(huán)境。
比如,機(jī)器人要將架子上的杯子放到旁邊的架子,最好的方法是將杯子直接平移,然而兩個(gè)架子之間有隔板,這就需要機(jī)器人反復(fù)試驗(yàn)、反復(fù)犯錯(cuò),直到它探索出更好的解決方案。
正如奧斯陸大學(xué)的機(jī)器人專家 Tonnes Nygaard 所說(shuō)的那樣:
如果我們一直執(zhí)著于一個(gè)解決方案,我們可能會(huì)走進(jìn)死胡同;我們更應(yīng)該專注于探索更多新的解決方案。
模擬與現(xiàn)實(shí)之間的差距
一些研究人員通過(guò)模擬來(lái)教機(jī)器人完成任務(wù)——建立一個(gè)數(shù)字世界,再讓其中的動(dòng)畫(huà)對(duì)象通過(guò)“犯錯(cuò)”的方式來(lái)完成任務(wù)。這種方法相對(duì)較快,因?yàn)楫?dāng)數(shù)字“機(jī)器”不受現(xiàn)實(shí)世界物理定律的約束,它們迭代的速度要快得多。
不過(guò),雖然模擬更高效,但它并不能完美地反映真實(shí)世界,模擬動(dòng)態(tài)人類(lèi)環(huán)境的復(fù)雜性。
這就導(dǎo)致,機(jī)器人在模擬環(huán)境中能夠完美匹配的理論,在現(xiàn)實(shí)世界中卻不適用。在現(xiàn)實(shí)世界中做任何事情都可能更慢、更費(fèi)力,但好處是,機(jī)器人能獲得的數(shù)據(jù)更純粹。
Facebook的人工智能研究科學(xué)家 Roberto Calandra 表示:
如果它在現(xiàn)實(shí)世界中行得通,那它就真的行得通。
畢竟,機(jī)器人在現(xiàn)實(shí)世界中要面對(duì)各種意想不到的麻煩,程序員不可能對(duì)每一個(gè)都預(yù)先進(jìn)行編碼。
AI 和機(jī)器人相得益彰
上圖是 Facebook 的六足機(jī)器人
從某種程度上來(lái)說(shuō),F(xiàn)acebook 的項(xiàng)目是 AI 和機(jī)器人的偉大融合。
雖然谷歌和亞馬遜和 Facebook 等科技巨頭已經(jīng)大大推動(dòng)了 AI 的發(fā)展,比如讓機(jī)器進(jìn)行圖像識(shí)別,不過(guò)這個(gè)任務(wù)仍基于人們事先給圖片貼好標(biāo)簽。不得不承認(rèn),機(jī)器還是不夠聰明。
隨著 AI 研究人員開(kāi)始使用機(jī)器人作為平臺(tái)來(lái)改進(jìn)軟件算法,這種情況開(kāi)始發(fā)生變化。
例如,F(xiàn)acebook 教機(jī)器人獨(dú)立完成一系列任務(wù),這反過(guò)來(lái)可能會(huì)對(duì)開(kāi)發(fā) AI 助手有所啟發(fā),讓它們能夠更好地為用戶服務(wù)。LeCun 說(shuō)道:
如果機(jī)器人解決了一個(gè)問(wèn)題,同理,它也能在另一種情況下解決這個(gè)問(wèn)題。
簡(jiǎn)而言之就是,AI 正在讓機(jī)器人變得更聰明,而機(jī)器人也在幫助推進(jìn) AI 的發(fā)展。
不過(guò),F(xiàn)acebook 表示,目前,公司的這項(xiàng)研究并沒(méi)有連接到特定的產(chǎn)品。不過(guò),LeCun 說(shuō):
我們認(rèn)為,機(jī)器人將在遠(yuǎn)程呈現(xiàn)中發(fā)揮重要作用。畢竟,F(xiàn)acebook 擁有 Portal 和 Oculus VR 系統(tǒng)。
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
29470瀏覽量
211526 -
Facebook
+關(guān)注
關(guān)注
3文章
1432瀏覽量
56176
原文標(biāo)題:Facebook:不會(huì)“犯錯(cuò)”的機(jī)器人,不是“聰明”的機(jī)器人
文章出處:【微信號(hào):smartman163,微信公眾號(hào):網(wǎng)易智能】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論