") 無人機(jī)管家推出傳統(tǒng)正射制作必備工具
無人機(jī)管家推出傳統(tǒng)正射制作必備工具

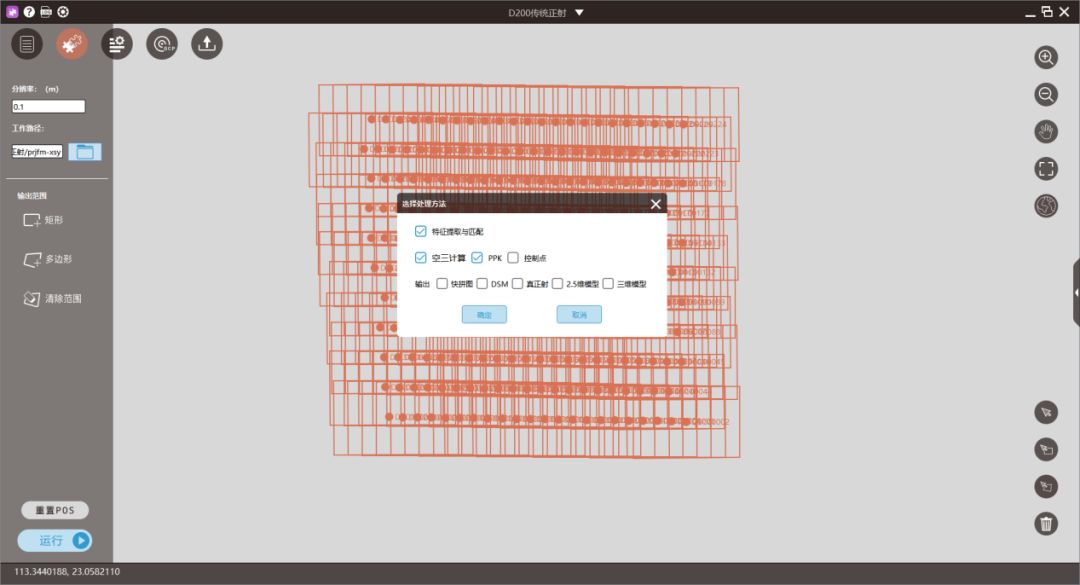
真正射(TDOM)是基于數(shù)字表面模型(DSM),采用數(shù)字微分糾正技術(shù),將中心投影獲取的影像轉(zhuǎn)換為正射投影影像,從而保證影像上每點(diǎn)都是完全垂直視角的影像處理技術(shù),但鑒于當(dāng)前真正射的技術(shù)限制,其建筑物邊緣常存在紋理不夠完整的現(xiàn)象,因此,傳統(tǒng)正射技術(shù)依舊是正射影像(DOM)生產(chǎn)主流技術(shù)手段。為了滿足用戶此類作業(yè)方式需要,無人機(jī)管家測量版于2019年1月25日發(fā)布的最新版本新增了傳統(tǒng)正射的解決方案,提供了DEM濾波提取、單片正射糾正、鑲嵌成圖、DEM編輯、鑲嵌線編輯等傳統(tǒng)正射制作必備工具,至此,飛馬無人機(jī)管家專業(yè)版已具備全自動(dòng)的快拼、空三、控制點(diǎn)量測、DOM、TDOM、DSM、2.5D及3D模型成果輸出功能,可以滿足用戶全方位的數(shù)據(jù)獲取及生產(chǎn)需求。

傳統(tǒng)正射處理界面
一、飛馬傳統(tǒng)正射解決方案特點(diǎn)
1、良好的數(shù)據(jù)兼容性,既支持飛馬無人機(jī)的影像處理,也支持第三方獲取的影像數(shù)據(jù)處理。
2、一鍵式自動(dòng)空三算法,支持高精度GPS聯(lián)合平差和相機(jī)自檢校,適應(yīng)各種地形的影像處理。
3、快速穩(wěn)健的密集匹配算法,密集匹配模塊采用了基于影像金字塔技術(shù)的改進(jìn)半全局匹配算法,一方面通過匹配結(jié)果的逐層傳遞,保證了匹配的穩(wěn)定性,另一方面,GPU并行計(jì)算的引入極大地提高了算法的運(yùn)行效率。
4、DEM提取的高效性,基于DSM成果直接進(jìn)行DEM濾波提取,相較于點(diǎn)云濾波提取,迭代次數(shù)少,效率更高。
5、DEM編輯工具的多樣性,提供多種DEM編輯工具,如DEM平滑,DEM內(nèi)插,DEM整體升降,滿足DEM編輯不同需求。支持DOM、等高線為參考的DEM編輯模式,可實(shí)時(shí)更新DOM,查看DEM編輯效果。
6、智能化鑲嵌線提取技術(shù),采用了改進(jìn)的“動(dòng)態(tài)規(guī)劃”鑲嵌線尋址算法,使得提取的鑲嵌線能夠自動(dòng)識(shí)別相鄰影像重疊區(qū)域的弱紋理區(qū)、陰影區(qū),可以有效繞過建筑物,大幅減少由于投影差引起的錯(cuò)位現(xiàn)象。
二、作業(yè)方案
基于無人機(jī)管家進(jìn)行傳統(tǒng)正射的作業(yè)流程如下:
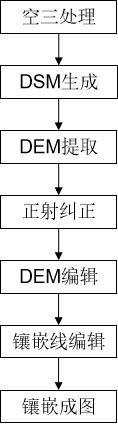
傳統(tǒng)正射作業(yè)流程
1、空三處理
無人機(jī)管家支持基于高精度GPS的免像控模式,PPK+控制點(diǎn)及僅控制點(diǎn)的三種空三模式,可滿足各種數(shù)據(jù)的處理需求。空三滿足精度后,則可進(jìn)入下一步操作。此次案例數(shù)據(jù)為D200正射飛行數(shù)據(jù),基于差分解算的高精度GPS,按照免像控模式進(jìn)行空三處理。
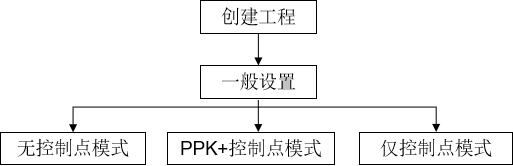
無人機(jī)管家空三模式
免像控空三處理
2、DSM生成
空三完成后,經(jīng)密集匹配、點(diǎn)云柵格化生成DSM成果。具體步驟如下:
(1)DSM的輸出設(shè)置
由于無人機(jī)管家的DOM和DSM的成果輸出路徑為同一界面設(shè)置,因此首先設(shè)置DOM的輸出分辨率及成果輸出路徑,則DSM默認(rèn)分辨率為DOM分辨率的2倍,輸出路徑為DOM設(shè)置路徑。
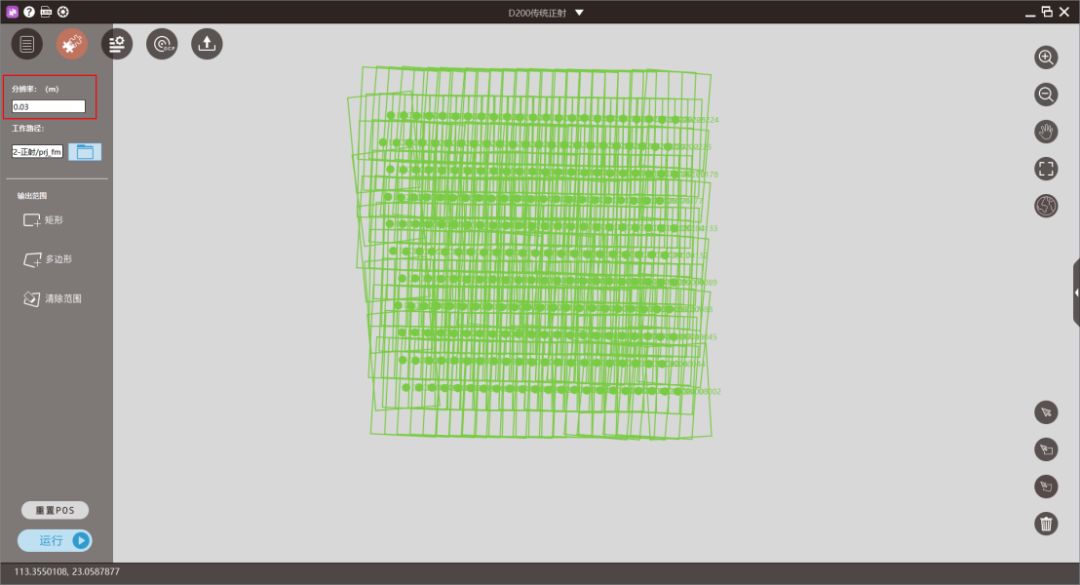
DOM/DSM分辨率設(shè)置界面
(2)一鍵生成DSM
選擇“傳統(tǒng)正射”→“DSM生成”,軟件一鍵式輸出DSM成果。
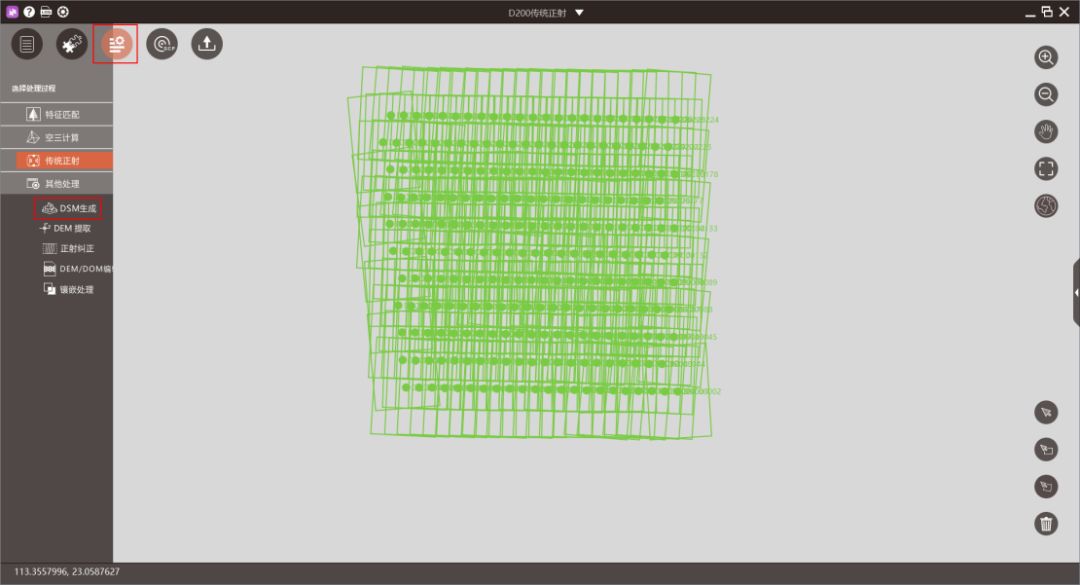
DSM生成工具
DSM成果
3、DEM提取
基于DSM成果直接進(jìn)行DEM的濾波提取,去除建筑物、樹木等非地形數(shù)據(jù),步驟如下:
(1)點(diǎn)擊“DEM提取”,設(shè)置DSM路徑和提取出來的DEM成果存放路徑。
(2)輸入建筑最大長度和高度,具體建筑尺寸可在DSM中量取獲得;也可以根據(jù)現(xiàn)場實(shí)際預(yù)估建筑物尺寸。點(diǎn)擊“確定”開始DEM提取。
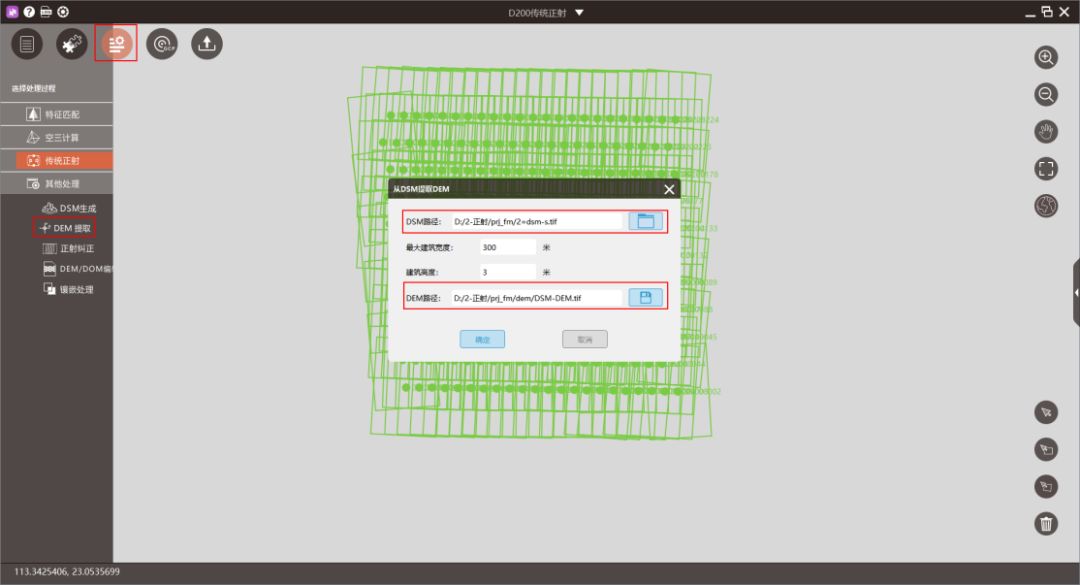
提取DEM參數(shù)設(shè)置
處理完成后,DSM中的大部分地物會(huì)被自動(dòng)過濾,獲得真實(shí)地形數(shù)據(jù)。而對(duì)于算法自動(dòng)濾除不掉的地物,則可進(jìn)入DEM編輯工具直接進(jìn)行編輯處理。
提取的DEM文件
DEM成果與DSM成果對(duì)比
4、正射糾正
基于DEM進(jìn)行單片正射糾正,軟件同時(shí)進(jìn)行鑲嵌線計(jì)算,自動(dòng)避讓建筑物,尋找最佳鑲嵌線位置。具體步驟如下:
(1)點(diǎn)擊“正射糾正”,鑲嵌線算法默認(rèn)為“鑲嵌線避讓”,指定提取的DEM文件。點(diǎn)擊“確定”,進(jìn)行單片正射糾正和鑲嵌線生成。
正射糾正
(2)在成果輸出的工作路徑下會(huì)自動(dòng)生成一個(gè)fm_tmp文件夾,該文件夾下包含生成的單幅正射影像以及鑲嵌線等附屬文件。
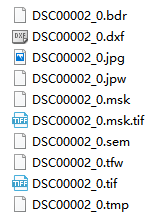
單幅正射影像及鑲嵌線
生成文件說明:
.bdr影像有效矢量邊界飛馬內(nèi)部格式
.dxf影像有效矢量邊界文件
.jpg單片正射糾正影像
.jpw單片正射糾正影像地理坐標(biāo)
.msk和_.msk.tif是有效邊界的柵格格式
.sem是鑲嵌線信息文件
.tif和.tfw是鑲嵌模板文件
.tmp是用于影像加速的相關(guān)文件
5、DEM編輯
傳統(tǒng)正射數(shù)據(jù)處理中,建筑物、道路等變形、扭曲、錯(cuò)位是常遇到的問題,一般通過以下方式解決:①通過編輯DEM解決建筑變形、扭曲問題;②編輯鑲嵌線解決建筑等錯(cuò)位問題,如果這些仍然不能解決,則需要通過PS等圖像處理工具解決。
飛馬無人機(jī)管家的DEM_DOM編輯模塊具備DEM編輯、鑲嵌線編輯、鑲嵌成果輸出三個(gè)功能,可同時(shí)進(jìn)行DEM編輯和鑲嵌線編輯,軟件提供各種交互編輯工具,并支持快捷鍵操作(快捷鍵可通過光標(biāo)長時(shí)間停留在功能鍵上顯示),可快速完成交互編輯,提高傳統(tǒng)正射生成效率。
DEM編輯和鑲嵌線編輯沒有一定的編輯順序要求,一般可先解決DEM導(dǎo)致的問題,再進(jìn)行鑲嵌線編輯,也可先鑲嵌線編輯再DEM編輯,還可二者同時(shí)進(jìn)行。這里首先講述DEM編輯的作業(yè)流程。
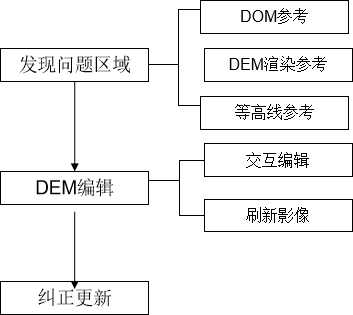
DEM編輯流程
(1)發(fā)現(xiàn)問題區(qū)域
DEM問題區(qū)域的發(fā)現(xiàn)可通過以下幾種方式:
1)DOM參考
顯示基于DEM的糾正影像,瀏覽檢查由DEM問題導(dǎo)致的DOM扭曲變形區(qū)域。
顯示設(shè)置:視圖→分塊顯示影像→單擊所要選擇影像的區(qū)域→框選矩形→勾選顯示.
顯示DOM設(shè)置
DEM問題區(qū)域
2)DEM渲染顯示
設(shè)置DEM不同渲染方式,檢查易產(chǎn)生DOM扭曲的區(qū)域,一般建筑物區(qū)域,道路區(qū)域可重點(diǎn)關(guān)注,或者DEM高程起伏較大區(qū)域。
DEM渲染設(shè)置:視圖→DEM默認(rèn)情況下會(huì)顯示彩色DEM;視圖→DEM→關(guān)閉彩色DEM,則會(huì)顯示灰度DEM。
彩色DEM
灰度DEM
3)等高線參考
可將等高線與DOM疊加顯示,對(duì)于等高線穿建筑物的區(qū)域可重點(diǎn)檢查是否有扭曲變形問題。
等高線參考
(2)DEM編輯
對(duì)于有問題的區(qū)域,采用DEM編輯工具進(jìn)行交互處理,且編輯的同時(shí)可實(shí)時(shí)查看編輯后DOM效果。
注意:在DEM編輯時(shí),所有的操作將會(huì)覆蓋原有的DEM。因此在作業(yè)前,務(wù)必備份原始DEM。備份方法:文件→備份DEM→選擇一個(gè)單獨(dú)文件夾備份。
備份DEM
1)濾除地物工具
根據(jù)DEM選擇邊界的高程內(nèi)插DEM,適用于大范圍DEM編輯,如密集建筑區(qū)域或較大地物。
點(diǎn)擊“濾除地物”,在DEM中找到需要清除的地物,左鍵多邊形選擇該地物,雙擊結(jié)束繪制多邊形繪制,軟件進(jìn)行自動(dòng)內(nèi)插生成新的DEM信息。
濾除地物范圍
濾除地物效果
2)橡皮擦工具
局部DEM平滑工具,適用于小范圍DEM編輯,如接近真實(shí)地形,但是有微小起伏的區(qū)域或者微小地物去除。
點(diǎn)擊“橡皮擦”,鼠標(biāo)左鍵進(jìn)行清除地物,可迭代使用。
DEM問題區(qū)域
橡皮擦清除效果
另橡皮擦大小可設(shè)置,設(shè)置→濾波參數(shù)→橡皮擦大小。
橡皮擦設(shè)置
3)DEM編輯效果查看
DEM編輯時(shí),可快速查看DOM糾正效果,由DOM糾正效果評(píng)判DEM編輯是否合適。
A、自動(dòng)刷新影像
完成DEM的同時(shí),完成該區(qū)域DOM的實(shí)時(shí)更新。在DEM編輯時(shí),在“設(shè)置”里面將“自動(dòng)刷新影像”設(shè)置為啟動(dòng)狀態(tài)(軟件默認(rèn)為啟動(dòng)狀態(tài))即可。且刷新后的DEM編輯范圍將以藍(lán)框顯示。
自動(dòng)刷新影像開啟設(shè)置
DEM編輯前DOM
DEM編輯后DOM
B、刷新影像
而對(duì)于橡皮擦工具來說。由于存在迭代使用的情況,若實(shí)時(shí)刷新影像,則會(huì)出現(xiàn)刷新遲鈍或者卡死的現(xiàn)象。因此橡皮擦工具使用時(shí),實(shí)時(shí)刷新工具建議設(shè)置為關(guān)閉狀態(tài)。此時(shí)DEM編輯范圍的顯示狀態(tài)為紅框,即已做過編輯,但未更新影像。
DEM編輯(未刷新影像)
若編輯完成后,需要查看DOM編輯效果時(shí),則可通過“刷新影像”,軟件即會(huì)針對(duì)當(dāng)前視圖中編輯過的DEM區(qū)域進(jìn)行糾正更新DOM顯示,此時(shí)DEM的編輯狀態(tài)將顯示為藍(lán)框。
DEM編輯狀態(tài)(刷新影像)
(3)糾正更新
DEM編輯完成后,須使用糾正更新,將DEM編輯過的區(qū)域重新進(jìn)行單片糾正,保證最后鑲嵌成圖使用編輯后的正射影像進(jìn)行。點(diǎn)擊編輯→糾正更新即可。
糾正更新處理
6、鑲嵌線編輯
鑲嵌成圖是將多個(gè)單片正射糾正影像拼接成一個(gè)整體圖的過程,鑲嵌線即為單張影像在成圖中所選用的影像范圍。一般來說,鑲嵌線應(yīng)避免穿過建筑物等帶有投影差的地物,以免其拼接產(chǎn)生錯(cuò)位變形等問題。無人機(jī)管家的鑲嵌線避讓算法可以繞開大部分帶有投影差的地物,但依然存在鑲嵌線穿過建筑物、圍墻等導(dǎo)致錯(cuò)位的現(xiàn)象,因此需要編輯鑲嵌線,使其盡可能落在弱紋理區(qū)域。其作業(yè)流程如下:
(1)分塊顯示數(shù)據(jù)
在數(shù)據(jù)量很大時(shí),加載全部影像,會(huì)影響操作的流暢度,因此為了快速瀏覽,管家采用分塊顯示的策略:先顯示局部區(qū)域影像進(jìn)行編輯,完成后再切換另一塊區(qū)域的影像進(jìn)行編輯。顯示方式:視圖→分塊顯示影像→單擊所要選擇影像的區(qū)域→框選矩形→勾選顯示。
分塊顯示數(shù)據(jù)
(2)發(fā)現(xiàn)問題區(qū)域
檢查DOM圖像上是否存在扭曲變形等問題,對(duì)于有問題的區(qū)域檢查是否因鑲嵌線穿過導(dǎo)致變形,若是,則進(jìn)行鑲嵌線編輯,若無,則需要判斷是否有DEM等其他原因?qū)е隆6行﹨^(qū)域雖然鑲嵌線穿過,若未導(dǎo)致圖面問題,也可不進(jìn)行編輯。
鑲嵌線繞過房屋
鑲嵌線穿過房屋
(3)鑲嵌線編輯
對(duì)于鑲嵌線穿過建筑物導(dǎo)致錯(cuò)位的問題需要進(jìn)行編輯,無人機(jī)管家的鑲嵌線為一系列的閉合多邊形組成,每個(gè)多邊形隸屬于一個(gè)影像,也就是鑲嵌成圖時(shí)所使用的影像部分。無人機(jī)管家的相鄰多邊形一定隸屬于不同的影像,但可能會(huì)存在多個(gè)多邊形屬于同一張影像。因此編輯的時(shí)候,需要判斷建筑物主體部分落在那個(gè)影像上,再修改鑲嵌線路徑使其該建筑物整體都被包含在該影像的多邊形內(nèi),編輯的同時(shí)需要參考該影像的有效區(qū)域(影像的實(shí)際圖像部分,不包括背景),超出則不能使用,則應(yīng)再切換其他影像編輯。具體步驟如下:
1)從下圖可以看出黃色矩形框內(nèi)的藍(lán)色建筑物被鑲嵌線穿過,鑲嵌線兩邊分別是影像1和影像2的部分,藍(lán)色建筑物的主體大部分都落在影像1范圍內(nèi),一般應(yīng)該修改鑲嵌線讓成圖取影像1部分。激活“鑲嵌線編輯”,單擊所在影像區(qū)域內(nèi)部,可查看影像的有效區(qū)域,發(fā)現(xiàn)影像1不能全覆蓋該建筑,而影像2能夠覆蓋選擇建筑,則此次編輯只能選擇影像2作為成圖部分。
問題區(qū)域
影像1有效區(qū)域
影像2有效區(qū)域
2)確定所要選擇的影像,則開始鑲嵌線編輯。左鍵單擊開始多邊形繪制,起始點(diǎn)必須落在成圖選擇的影像區(qū)域內(nèi),如下圖,起始點(diǎn)必須點(diǎn)擊在影像2范圍內(nèi),然后繞過建筑物,雙擊結(jié)束多邊形繪制。
鑲嵌線編輯
3)鑲嵌線結(jié)束繪制后,視圖實(shí)時(shí)刷新,顯示鑲嵌線編輯后的成圖效果,如示例中問題區(qū)域則會(huì)顯示影像2的圖像部分,建筑物不再錯(cuò)位,即完成了該區(qū)域的鑲嵌線編輯。
注意:由于鑲嵌編輯的刷新顯示不進(jìn)行色彩羽化,可能會(huì)存在色差,而軟件在鑲嵌成圖時(shí)會(huì)進(jìn)行色彩均衡處理,因此編輯時(shí)遇到的色差問題可暫不處理。
鑲嵌線編輯后效果
對(duì)于無法判斷影像如何選取,可嘗試選擇編輯不同影像范圍,查看效果,如不滿意,則可進(jìn)行鑲嵌撤銷,恢復(fù)原來狀態(tài)。
鑲嵌撤銷
7、鑲嵌處理
根據(jù)更新后的正射影像及鑲嵌線進(jìn)行鑲嵌,輸出最終的DOM成果。
鑲嵌成圖包括兩種方式:
(1)在DEM_DOM編輯模塊中,點(diǎn)擊“鑲嵌處理”,可輸出最終DOM成果。
鑲嵌處理界面1
(2)退出DEM_DOM編輯模塊,選擇“傳統(tǒng)正射”→“鑲嵌處理”,即輸出最終DOM成果。
鑲嵌處理界面2
輸出DOM保存在工程路徑下,名字為1=dom.tif,可采用view工具打開瀏覽。
DOM輸出位置
DOM成果
-
無人機(jī)
+關(guān)注
關(guān)注
231文章
10841瀏覽量
186735 -
影像處理
+關(guān)注
關(guān)注
0文章
6瀏覽量
8468
原文標(biāo)題:無人機(jī)管家推出傳統(tǒng)正射解決方案
文章出處:【微信號(hào):feimarobotics2015,微信公眾號(hào):飛馬機(jī)器人】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
低空物流:無人機(jī)開啟未來配送新篇章
無人機(jī)巡檢系統(tǒng)對(duì)傳統(tǒng)交通巡檢的顛覆

石英晶振在無人機(jī)領(lǐng)域的應(yīng)用

無人機(jī)高速公路巡檢系統(tǒng):守護(hù)道路安全的空中管家
無人機(jī)消防巡檢系統(tǒng)守護(hù)城市安全
無人機(jī)巡檢系統(tǒng)守護(hù)未來的空中衛(wèi)士
《手把手教你做星閃無人機(jī)—KaihongOS星閃無人機(jī)開發(fā)實(shí)戰(zhàn)》系列課程課件匯總
植保無人機(jī)電池性能測試方法
DIY了一臺(tái)無人機(jī),用全志T113芯片
無人機(jī)智能巡檢系統(tǒng)與傳統(tǒng)巡檢方式的對(duì)比

寶礫微DC-DC升級(jí)壓電動(dòng)代步工具、無人機(jī)電源方案
光伏無人機(jī)巡檢系統(tǒng)的應(yīng)用
無人機(jī)智能巡檢系統(tǒng)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論