 異構多核處理器滿足自主設備的安全要求
異構多核處理器滿足自主設備的安全要求

自主設備的出現可能是本十年最令人期待的發展之一。它主要是以車輛的形式進行探索,可以展示某種程度的自動駕駛;市場上已經出現了可以與有限駕駛員協助并行停放的汽車,而谷歌的自動駕駛汽車項目在美國累積了超過150萬自治里程。
然而,自主設備有多種形狀。希思羅機場的5號航站樓停車場“吊艙”是自動駕駛車輛,可以將乘客從他們的汽車運送到候機室,盡管在規定的路徑上行駛并且沒有其他道路使用者的阻礙。現在世界上有許多無人駕駛輕軌的例子。除了大規模運輸之外,無人機變得更加自主,需要從操作員那里直接輸入更少的東西來懸停,改變高度或方向;這里的潛在趨勢是無人機變得完全自主,將貨物從A點運輸到B點而沒有任何直接的人為控制。
實現這種自治水平的大部分技術仍在開發中,這項法規將允許其大規模推廣。
沒什么新東西?
在很多方面,嵌入式設備總是自動運行;不同的是,他們也基本上是靜止的。然而,用于開發嵌入式應用程序,特別是嵌入式軟件的實踐反映了嵌入式設備的性質。它們(通常)存在以執行特定功能并且具有可預測的條件,在這些條件下它們必須具有可清楚識別的刺激。開發高質量嵌入式應用程序的“藝術”是設備處理不可識別的刺激或不可預測的條件的方式。
在大多數情況下,軟件將包含一種強有力的邏輯方式來有效地忽略所有那些不直接影響其主要功能的條件。如果設備是打印機那就沒關系,如果設備能夠按照自己的意愿移動,那就不太好了。正是這一關鍵差異定義了開發人員在設計自主設備時面臨的主要挑戰。忽略與主要功能無關的條件或刺激是不可接受的,因為主要功能將無法在不可預測性是主要輸入的世界中可靠和安全地導航。
美國國家公路交通安全管理局(NHTSA)使用五個級別的自動化,明確區分駕駛員輔助系統和自動駕駛系統。在0級操作的系統沒有表現出汽車(轉向,制動,加速器)的主要安全功能的自動化,因此包括當今的大多數駕駛員輔助系統,例如車道偏離或碰撞檢測警告。這些定義最終達到了第4級:完全自動駕駛自動化,其中包括無人駕駛車輛。
當然,相同的定義不一定適用于不打算運送人員的自主設備;但是在開發能夠對系統未必先前描述的條件做出適當反應的系統方面存在同樣的挑戰。
處理范例
政府和行業充分意識到自主設備的潛力。在英國,機器人和自治系統(RAS)特別興趣小組(RAS-SIG)成立于2013年,目的是了解RAS在英國的景觀和機遇。它已經確定了很多,包括RAS工具:能夠在與環境和人員互動的同時移動自己和其他東西,并規劃他們的動作和行動的工具。
這樣的系統將更加“可預測”運行'環境比其他形式的自動駕駛汽車,旨在移動城市和農村地區的貨物和乘客。在這種情況下,設備需要的不僅僅是前視雷達,以避免碰撞;他們將依靠系統的方法來連接自動道路車輛,使他們能夠共享信息,甚至相互學習。新興的車輛到車輛(V2V)和車輛到基礎設施(V2X)通信系統旨在提供這種級別的連接,這是在任何駕駛條件下保持所有道路使用者安全所必需的。
收集和處理此級別信息所需的智能已經可用,并且可以在多核設備和片上系統(SoC)中找到。其中一些設備專門針對汽車市場和ADAS(高級駕駛員輔助系統),但更多設備用于更廣泛的應用領域。
這些設備將高吞吐量數據處理能力與實際相結合單個設備中的時間控制功能。多個處理內核的緊密集成允許子系統之間更快的數據交換,同時獨立工作以保持安全性和安全性要求。通常,這些設備還將集成專用于特定應用的外圍設備,例如傳感器接口。當然,傳感器將在自主設備中發揮關鍵作用,并將包括攝像機以及其他類型的傳感器技術,例如紅外線和各種形式的光傳感器,用于檢測路徑,障礙物和接近度。超聲波和雷達也正在開發時考慮到自主設備。
多核有意義
像VF6xx(恩智浦Vybrid系列的一部分)這樣的異構多核設備結合了不同但互補的處理子系統,以及模擬和數字外設,使其適用于許多應用。對于VF6xx,有兩個內核:具有DSP功能的ARM?Cortex?-M4和ARM Cortex-A5。雖然能夠使用網絡互連(NIC)系統(構成Vybrid系列中設備的“主干”)來交換數據,但這兩個內核旨在獨立運行,并在必要時運行不同的操作系統。圖1顯示了VF6xx的框圖。
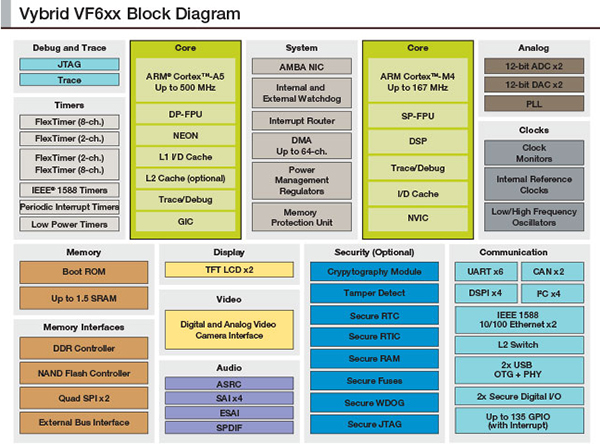
圖1:恩智浦的Vybrid VF6xx具有兩個ARM內核,可提供實時控制和高水平的數據處理
例如,Cortex-A5內核可以執行Linux發行版和應用程序代碼,而Cortex-M4內核可以運行實時操作系統(RTOS)來實現控制功能。雖然不是專為自主設備開發的,但是在單個設備中的這種分離水平可用于在必須處理來自多個源的大量數據的設備中實現低成本,高效的控制系統,同時保持實時控制電機和執行器。
延遲是實時系統的主要因素,因此需要RTOS。由于所有數據傳輸必須通過VF6xx中的NIC,因此它旨在最大程度地減少延遲。它還維護總線主控器(內核和DMA)與從器件(外設和存儲器)之間的關系。主設備和從設備之間的任何數據傳輸都會產生延遲,因此系統級架構是設計基于多核SoC的系統的一個重要方面。
雖然VF6xx具有多個內存,可以通過NIC訪問兩個內核,Cortex-M4還有自己的緊耦合存儲器(TCM),這是一個使用本地存儲器控制器直接連接到核心的標準SRAM。因此,內核可以在一個周期內訪問TCM,使其成為實時控制的理想選擇。
高分辨率控制
多核設備現在可用于各種應用程序,通常需要將連接性與精確和自適應控制相結合。這是德州儀器公司的Concerto系列目前定位的地方,盡管可以想象它可以用于自動設備。
它采用了與TI自己的C28x浮點內核集成的ARM Cortex-M3內核;與TI的Piccolo?和Delfino?系列相同的核心。 ARM內核旨在提供通信子系統,而C28x內核則涵蓋實時控制。
該架構具有許多可由任一內核訪問的模擬外設。其中包括兩個12位ADC和六個10位DAC模塊(每個模塊都包含一個比較器)。
處理器間通信外圍設備(IPC)為兩個內核提供交換數據和同步程序執行的基礎結構。交換通過寄存器和軟件中的簡單握手進行控制。提供外部外設接口(EPI),也可由兩個內核訪問,允許高速并行總線與外部外設和存儲器連接。 EPI的靈活性意味著它可以使用標準控制協議以及FPGA和CPLD與大多數類型的外設接口。
自主設備的一個主要特點是它們的移動能力,這很有可能使用無刷直流電機(BLDCs)進行運動和“重載”,以及步進電機,可以在操作較小的物品時精確控制“手臂”和“手指”。現在通過脈沖寬度調制(PWM)來控制BLDC的默認方法。 Concerto F28M35x具有9個PWM模塊;其中八個是高分辨率。
反饋是控制系統中的關鍵因素,在自主設備中同樣重要。 Concerto解決這個問題的方法之一是通過增強型正交編碼脈沖模塊或eQEP。這旨在直接連接到線性或旋轉編碼器,以收集位置,方向和速度數據。圖2顯示了旋轉編碼器的典型實現以及eQEP模塊檢測到的結果波形。
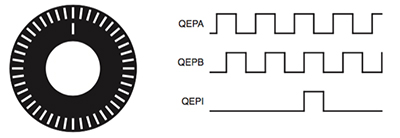
圖2:德州儀器的Concerto系列將行業標準ARM Cortex-M3與其自己的C28xx內核結合在一起,提供適用于各種控制的多核處理器應用程序。
結論
自主設備,包括無人駕駛飛行器,下一代“智能工具”,當然還有車輛,預計將在未來幾年內變得更加普遍到了我們都熟悉他們在大多數人的生活中的存在。在開發任何類型的自主設備時,安全是一個主要考慮因素,國家和國際標準將繼續發展以解決這個問題。今天針對工業應用的所有高度集成的處理器將能夠滿足當今的安全要求,并使它們處于成為自治時代先鋒的絕佳位置。
盡管炒作,自主設備市場目前仍處于起步階段,因此半導體制造商需要一些時間才能有足夠的信心和市場洞察力來開發專用設備來解決這個問題。與此同時,開發人員可以依賴本文中描述的異構多核設備。
-
處理器
+關注
關注
68文章
19890瀏覽量
235118 -
嵌入式
+關注
關注
5150文章
19665瀏覽量
317428 -
自動駕駛
+關注
關注
789文章
14316瀏覽量
170596
發布評論請先 登錄
異構多核處理器系統的特點及基于加權優先級的任務調度算法分析
多核異構通信框架(RPMsg-Lite)

多核處理器設計九大要素
創龍帶您解密TI、Xilinx異構多核SoC處理器核間通訊
MPU進化,多核異構處理器有多強?
北京君正X2600處理器亮相ELEXCON 2023,打造多核異構跨界新價值
異構多核處理器提供了自主設備的完美平臺





 工商網監
工商網監
評論