") 一種基于A*算法的用于道路場景的軌跡規(guī)劃方法
一種基于A*算法的用于道路場景的軌跡規(guī)劃方法

本文提出了一種基于A*算法的用于道路場景的軌跡規(guī)劃方法,該方法中,使用了圖形搜索近似,并且通過一種新的推理技術(shù)來考慮其他車輛的不確定預(yù)測,這種新的推理技術(shù)允許高效計算一組模擬場景類型的危險結(jié)果的概率。研究者相信本文提出的幾何推斷方法可以很好地適應(yīng)模型傳感器范圍和遮擋限制。
什么是路徑規(guī)劃和軌跡規(guī)劃?
車輛自主駕駛系統(tǒng)從本質(zhì)上講是一個智能控制機器,其研究內(nèi)容大致可分為信息感知、行為決策及操縱控制三個子系統(tǒng)。
路徑規(guī)劃是智能車輛導(dǎo)航和控制的基礎(chǔ),是從軌跡決策的角度考慮的,可分為局部路徑規(guī)劃和全局路徑規(guī)劃。全局路徑規(guī)劃的任務(wù)是根據(jù)全局地圖數(shù)據(jù)庫信息規(guī)劃出自起始點至目標(biāo)點的一條無碰撞、可通過的路徑。由于全局路徑規(guī)劃所生成的路徑只能是從起始點到目標(biāo)點的粗略路徑,并沒有考慮路徑的方向、寬度、曲率、道路交叉以及路障等細(xì)節(jié)信息,加之智能車輛在行駛過程中受局部環(huán)境和自身狀態(tài)的不確定性的影響,會遇到各種不可測的情況。
因此,在智能車輛的行駛過程中,必須以局部環(huán)境信息和自身狀態(tài)信息為基礎(chǔ),規(guī)劃出一段無碰撞的理想局部路徑,這就是局部路徑規(guī)劃。通常路徑規(guī)劃的方法有:空間搜索法、層次法、動作行為法、勢場域法、柵格法、模糊邏輯法和神經(jīng)網(wǎng)絡(luò)法等。
汽車自動駕駛?cè)蝿?wù)可以分為三層,如圖所示,每層執(zhí)行不同任務(wù),包括上層路徑規(guī)劃,中層行駛行為規(guī)劃和下層軌跡規(guī)劃。
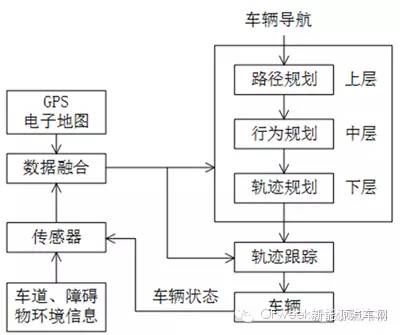
上層路徑規(guī)劃在已知電子地圖、路網(wǎng)以及宏觀交通信息等先驗信息下,根據(jù)某優(yōu)化目標(biāo)得到兩點之間的最優(yōu)路徑,完成路徑規(guī)劃的傳感信息主要來自于GPS定位信息以及電子地圖。
中層行駛行為規(guī)劃是指根據(jù)主車感興趣區(qū)域內(nèi)道路、交通車等環(huán)境信息,決策出當(dāng)前時刻滿足交通法規(guī)、結(jié)構(gòu)化道路約束的最優(yōu)行駛行為,動態(tài)規(guī)劃的行駛行為序列組成宏觀路徑。行為規(guī)劃的傳感信息主要來自車載傳感器如雷達(dá)、照相機等,用以識別道路障礙、車道線、道路標(biāo)識信息和交通信號燈信息等。
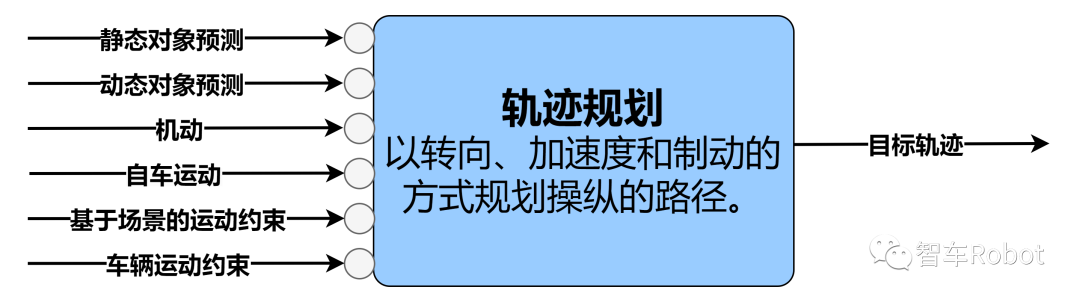
下層軌跡規(guī)劃是指在當(dāng)前時刻,以完成當(dāng)前行車行為為目標(biāo),考慮周圍交通環(huán)境并滿足不同約束條件,根據(jù)最優(yōu)目標(biāo)動態(tài)規(guī)劃決策出的最優(yōu)軌跡。同時,車輛的動力學(xué)約束也會在下層得到體現(xiàn),下層軌跡規(guī)劃除了必要的外部環(huán)境信息外,還需要對主車狀態(tài)信息進(jìn)行測量或估計。
車輛路徑規(guī)劃問題中的幾個關(guān)鍵點:路網(wǎng)模型、路徑規(guī)劃算法和交通信息的智能預(yù)測,涉及的方面較多。本文主要探討軌跡規(guī)劃。
用于道路場景的軌跡規(guī)劃方法
A概述
本文提出了一種基于A*算法的用于道路場景的軌跡規(guī)劃方法,該方法中,使用了圖形搜索近似,并且通過一種新的推理技術(shù)來考慮其他車輛的不確定預(yù)測,這種新的推理技術(shù)允許高效計算一組模擬場景類型的危險結(jié)果的概率。同時研究者還將這種軌跡規(guī)劃方法與基于蒙特卡羅方法的POMDP求解器進(jìn)行了比較,發(fā)現(xiàn)雖然POMDP求解器可以規(guī)劃比該研究的方法更保守更復(fù)雜的行為,但是它遭受粒子剝奪,這可能會導(dǎo)致危險的行為。這是因為蒙特卡羅方法有時不會有足夠多的樣本用于罕見但危險的未來情況。相反,我們的方法使用了對未來信念狀態(tài)的參數(shù)化描述,并且沒有遭受這個問題的困擾,并且運行時間明顯更長。
圖1:道路行駛功能系統(tǒng)架構(gòu)
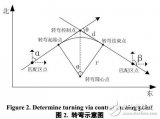
圖1顯示了用于自主道路操作的模塊的高級視圖。全局規(guī)劃模塊處理任務(wù),為軌跡規(guī)劃模塊提供路線,這也需要定位、附近車道模型和描述附近物體狀態(tài)和行為的模型。軌跡規(guī)劃模塊應(yīng)該為自主車輛(稱為ego車輛)找到合適的軌跡,以便遵循公式:

其中xe是自我車輛的狀態(tài),Th是預(yù)測范圍的長度。這是通過優(yōu)化成本函數(shù)來實現(xiàn)的,其中高風(fēng)險的軌跡具有高成本。通過分析由 i 指數(shù)的附近其他車輛的不確定預(yù)測來估計風(fēng)險。在不確定性下的這種計劃將在該方法中以固定間隔重復(fù),而當(dāng)前最佳計劃由下級控制模塊執(zhí)行。
這里,我們通過借用[13]中的符號和定義簡要概述不確定條件下的軌跡規(guī)劃問題。我們假設(shè)環(huán)境狀態(tài)x =(xe,xi),i = 0,..,K在計劃范圍的離散時間步長中演變:

其中xik是車輛 i 在時刻tnow+kΔtp的狀態(tài),uk是對于自我車輛的控制動作,ωk是擾動,并且N = Th/Δtp其中Δtp是時間離散化。我們每次都會對環(huán)境進(jìn)行嘈雜的測量:
其中νk模擬測量噪聲。一般來說,我們不能直接觀察xk,而是總結(jié)信息狀態(tài)Ik中的所有可用信息。目標(biāo)是為計劃范圍找到最優(yōu)策略Π* = {π*0(I0),...,π*N-1(IN-1)},給出我們的控制動作,在給定信息狀態(tài)的情況下最小化未來預(yù)期成本,對于附加成本函數(shù):

為了找到最優(yōu)政策,我們計劃在信念空間中,并對未來的測量做出不同的假設(shè),以獲得易處理的問題。在信念狀態(tài)bk被定義為bk= p(xk| Ik)并且Ik是歷史I狀態(tài)的情況下:Ik=(I0,u0:k-1,y0:k-1)。這個問題可以重新表述為隨機動態(tài)規(guī)劃(SDP)問題。
我們可以使用部分可觀察的決策過程(POMDP)方法來逼近SDP問題的解決方案,或者我們可以以后退的方式解決一系列控制動作,忽略未來的測量。我們在本文中使用的后一種方法稱為開環(huán)后退水平控制(OLRHC),這里信念狀態(tài)是“對象的開環(huán)預(yù)測分布”[13],反饋是通過重新規(guī)劃實現(xiàn)的。
如[5] [14]中所述,我們的軌跡規(guī)劃算法描述了自主車輛的狀態(tài),在道路對齊的坐標(biāo)系中,橫坐標(biāo)對應(yīng)于沿參考路徑的弧長s,縱坐標(biāo)表示有符號的橫向距離。路徑d。我們假設(shè)我們可以精確地測量與參考路徑(se0,de0)相關(guān)的當(dāng)前狀態(tài),并且可以獲得其他車輛的開環(huán)預(yù)測列表。設(shè)xik是慣性參考系中車輛 i 的姿態(tài)和速度,xik=(x,y,θ,v),xik是與參考路徑 r 相關(guān)的狀態(tài),xik,r=(sik,r, dik,r, sik,r)和g(xik,r)= xik是在它們之間進(jìn)行映射的函數(shù)。 對每個其他車輛的預(yù)測表示為高斯混合序列,其中每個高斯模型表示車輛狀態(tài)相對于特定路線的分布:

其中αj是高斯prj(xik,r(j))=N(μir(j),k,Σir(j),k)的混合分量權(quán)重,描述了假設(shè) j 的路徑 r(j)的車輛 i 的狀態(tài)分布。該表示允許我們表達(dá)單個車輛的多個運動假設(shè),例如,我們模擬車輛是否將使用不同的αj值轉(zhuǎn)向兩個假設(shè)的不確定性,每個假設(shè)屬于不同的路線。分布N(μir(j),k,Σir(j),k)可以用不同的方法估計,例如[15],或者諸如執(zhí)行卡爾曼濾波器的預(yù)測步驟的簡單方法。我們還假設(shè)我們知道每條車輛沿其路線的縱向范圍。
軌跡規(guī)劃算法可以訪問道路模型,在該道路模型中,軌道規(guī)劃算法可以快速確定兩條路線是否相鄰,例如,檢查車輛是否在我們的左側(cè)或右側(cè),如果一輛車與另一輛車合并或者路線是否交叉。本文描述風(fēng)險評估方法主要基于兩條車輛在路線上占據(jù)相同縱向位置的距離和車輛的相對速度。
B圖形搜索近似
決定什么時候改變車道,或者當(dāng)駕駛到兩個車道合并的道路的一部分時是一個非凸的問題,特別是我們經(jīng)常可以選擇在另一輛車前面或后面,每個車輛都有一個局部最佳值選擇。 通過允許為我們的解決方案用一組采樣狀態(tài)值,我們將軌跡優(yōu)化轉(zhuǎn)換為圖搜索問題:從有限集中找出狀態(tài)值的序列,其具有最低成本,滿足我們的約束并達(dá)到狀態(tài)預(yù)測范圍的結(jié)束。我們通過對 和時間進(jìn)行采樣來構(gòu)造一個格子超過允許狀態(tài),并定義模擬我們的控制動作的運動原語u從時間k的狀態(tài)(s,d,v)轉(zhuǎn)換到時間k的另一個狀態(tài) k+1,k后的Δtp秒,從而形成可能的狀態(tài)序列的圖形表示。我們使用了一個簡化的模型來說明車輛在道路對齊坐標(biāo)系中的移動方式:
和時間進(jìn)行采樣來構(gòu)造一個格子超過允許狀態(tài),并定義模擬我們的控制動作的運動原語u從時間k的狀態(tài)(s,d,v)轉(zhuǎn)換到時間k的另一個狀態(tài) k+1,k后的Δtp秒,從而形成可能的狀態(tài)序列的圖形表示。我們使用了一個簡化的模型來說明車輛在道路對齊坐標(biāo)系中的移動方式:

其中運動原語由不同的預(yù)定義加速度和橫向速度組成。速度v被限制為在上面被vmax限制為非負(fù),并且d被縮放到1和1之間,其中1是參考路徑右邊的一個車道寬度和左邊一個車道寬度。允許速度的集合是從v = 0開始可達(dá)到的任何速度,其是非負(fù)的并且在規(guī)劃步驟的整個時間期間使用A中的任何加速度小于vmax,假設(shè)步驟之間的加速度瞬時變化。允許縱向位置的集合是時間步長k = 0,...,N 從 s = 0 開始以初始速度進(jìn)入并且使用A中的加速度行進(jìn)的距離的集合。在我們的簡化模型中,我們允許加速度的瞬時變化這個誤差假設(shè)最多是dmin的縱向位置誤差,它是從執(zhí)行模塊轉(zhuǎn)換為非完整運動的距離中減去的。
對于我們在A *算法中的啟發(fā)式,我們使用進(jìn)入結(jié)束狀態(tài)(k = N)的最優(yōu)成本,假設(shè)如果dk不在車道的中心并且在時間步長k,k + 1之間將發(fā)生橫向移動,并且沒有其他車輛。 這些成本是針對每個s,v,k組合離線計算的并存儲在查找表中。 這低估了達(dá)到目標(biāo)狀態(tài)的成本,因為cl和cd總是大于或等于零,啟發(fā)式是可以接受的。
總結(jié)
自動駕駛車輛的軌跡規(guī)劃應(yīng)試圖在傳感器數(shù)據(jù)噪聲和不確定預(yù)測的情況下最小化預(yù)期風(fēng)險。本文提出了一種基于圖搜索近似的道路場景軌跡規(guī)劃方法。其他車輛的不確定預(yù)測是由一種新的推理技術(shù)來解釋的,這種推理技術(shù)可以有效地計算建模情況類型集的危險結(jié)果的概率。對于高速公路合并場景,這里使用簡單的恒速預(yù)測,研究者并不考慮傳感器范圍和遮擋。未來的工作將考慮更復(fù)雜的預(yù)測模型,研究者相信本文提出的幾何推斷方法可以很好地適應(yīng)模型傳感器范圍和遮擋限制。例如,為了對超出傳感器范圍的可能車輛所構(gòu)成的風(fēng)險進(jìn)行建模,研究者可以在給定未知車輛速度和位置的統(tǒng)一概率的情況下,整合約束違反概率。
-
傳感器
+關(guān)注
關(guān)注
2565文章
52973瀏覽量
767209 -
智能車輛
+關(guān)注
關(guān)注
0文章
19瀏覽量
19303 -
自動駕駛
+關(guān)注
關(guān)注
788文章
14313瀏覽量
170576
原文標(biāo)題:道路場景中的風(fēng)險最小化軌跡規(guī)劃
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
介紹一種永磁同步電機控制的軌跡規(guī)劃方案
一種結(jié)構(gòu)化道路環(huán)境中的視覺導(dǎo)航系統(tǒng)詳解
RBF神經(jīng)網(wǎng)絡(luò)的機器人軌跡規(guī)劃方法
基于差分隱私的軌跡模式挖掘算法
一種用于內(nèi)層規(guī)劃的改進(jìn)粒子群算法
一種軌跡差分隱私發(fā)布方法

一種基于Frenet坐標(biāo)系的優(yōu)化軌跡動作規(guī)劃方法
如何使用改進(jìn)人工魚群算法來進(jìn)行車輛軌跡規(guī)劃方法概述
一種用于手機信令的時空密度軌跡點識別算法

一種基于運動軌跡捕捉的WSN節(jié)點定位算法
一種適用于動態(tài)場景的多層次地圖構(gòu)建算法
自動駕駛軌跡規(guī)劃功能模塊圖
一種基于自然語言的軌跡修正方法






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論