 簡要介紹高級輔助駕駛系統ADAS的專利技術
簡要介紹高級輔助駕駛系統ADAS的專利技術
自動駕駛是指依靠汽車上的安裝的各種傳感設備,例如攝像頭、激光雷達、毫米波雷達、超聲波雷達、紅外雷達以及各種速度、角度傳感器收集感測汽車本身及周圍的環境信息,同時可能還會借助人工智能、計算機圖像技術、全球定位系統和/或云端服務技術,讓車輛在沒有任何駕駛員的操作下自動安全地駕駛,實現轉向、加減油門和剎車等。
自動駕駛技術背景
根據國際汽車工程師協會對自動駕駛汽車的分級,大概可以分為五級:
L1:駕駛輔助,針對方向盤和加減速中一項操作提供駕駛輔助,其他由駕駛者操作;
L2:部分自動化,針對方向盤和加減速中多項操作提供駕駛支援,其他由駕駛者操作;
L3:有條件自動化,可以完成所有駕駛操作,根據系統請求,駕駛員提供適當操作;
L4:高度自動化,可由無人駕駛系統完成所有駕駛操作,部分需要駕駛員決策;
L5:完全自動化,無需駕駛員任何操作,全靠無人駕駛操作,必要時可切換至人工模式。
目前多數自動駕駛車均處于L2級,部分可達到L3。除了傳統的汽車制造廠商,一些互聯網公司,如google, 百度等也紛紛投入重金進行自動駕駛技術的研發和生產。現在很多車輛已經具備了高級輔助駕駛系統ADAS、自動巡航ACC等功能,可以在一定程度上輔助駕駛員。在新聞中,大家經常可以看到GOOGLE, UBER, 百度無人車上路測試,也有出現故障甚至事故的情形。目前看來,自動駕駛距離完全拋去方向盤、油門、剎車等操作裝置實現完全自動化的一天還有很長的路要走。
本文就以高級輔助駕駛系統ADAS為例,簡要介紹其中涉及的專利技術,在此之前我們還是對自動駕駛技術相關的專利進行總體分析。
自動駕駛專利申請情況
自動駕駛技術大概是在2009年左右提出概念,也許還有少部分相關專利是在2010年之前就申請了,但本文首先對2010年以來大量申請的跟自動駕駛技術相關的專利申請進行一個粗略的檢索和統計分析,檢索僅對在專利申請的發明名稱及摘要中顯性出現自動駕駛中英文關鍵詞及其近義詞進行了限定,檢索結果還比較粗糙,僅作為一個參考。
經過統計分析,自動駕駛領域的專利申請總體態勢如下:
申請趨勢
根據自動駕駛技術相關的專利歷年申請趨勢來看,自2010年至今相關技術的專利申請一直處于持續增加的態勢,企業創新熱情持續保持高漲。由于專利公開最晚可以自申請日之后18個月才公開,故部分專利可能實際已申請但現在通過公開途徑無法檢索到,從上圖反映出來,2017年以來的專利申請快速回落,這可能跟實際情況有所偏差。
專利申請地域分布
從專利申請數量上來看,中國是目前自動駕駛專利申請最多的國家,有2688件;接下來申請量排名第2-4位的是傳統的汽車大國德國、美國和日本,分別有2060,1371和1072件相關申請;然后,PCT申請和EP申請也有諸多企業布局專利,分別有1015,711件申請;韓國也有707件申請;另外,法國、英國、印度和墨西哥是其它布局相對較多的國家,分別有202,145,49和43件相關申請。
申請人排名
從申請人排名來看,傳統汽車廠商,尤其是德系、日系和美系汽車公司牢牢占據了自動駕駛技術的專利申請TOP20,豐田、博世、福特公司則是包攬了前三名。而中國汽車廠商吉利、奇瑞、北汽、上汽、廣汽等公司有少量布局,互聯網公司谷歌、百度、優步、法拉第未來等公司也有所專利布局。
分類號
IPC分類號從一定程度上體現了相關專利技術的分布情況,本文前文限定了檢索時使用的主要IPC分類號B60W和B60R,此處統計顯示的更下位的技術分類以及同時分類到其他分類號的情形。請注意,上述統計對于一件專利分到多個分類號的情形采取的統計方法是重復統計來進行計算的。
ADAS技術專利淺析
ADAS技術算是自動駕駛應用最為廣泛的一個技術。具體而言,ADAS技術包括:停車輔助、車道輔助、司機檢測、超車變道/并線、自動避讓、導航線路預測等。實際的專利布局情況是否是這樣呢?我們通過Patentics的地圖分析功能以自動駕駛相關的中英文關鍵詞作為簡單輸入得到下圖分析結果。
由下圖可見,自動駕駛技術領域的專利申請主要分布在:本車行駛狀態監測、外部車輛監測、車道行駛輔助、車距保持、變道超車、自動泊車、駕駛員狀態監控等。上述專利申請分布情況與實際的ADAS技術應用情況還是存在高度重合性。下面以車道行駛輔助、變道超車、自動泊車為例對ADAS技術相關專利進行簡要介紹。
車道行駛輔助
以車道行駛輔助為例,其可以包括本車道駕駛輔助和變道輔助,本車道駕駛輔助又可以分為車道保持LKA和偏移警示LDW技術等,而變道輔助又可以分為自動轉向輔助和盲點監測輔助等。下面將就這些技術的相關專利進行部分展示。
在車道保持模式下,車輛控制轉向和車速,以盡可能保持在同一車道中。在換道模式或車道保持模式下,駕駛員可通過施加制動或者恢復對于方向盤的控制而撤銷自主式車道控制系統的控制。下面左圖為本申請車道保持代表附圖,右圖為本申請換道行駛代表附圖。
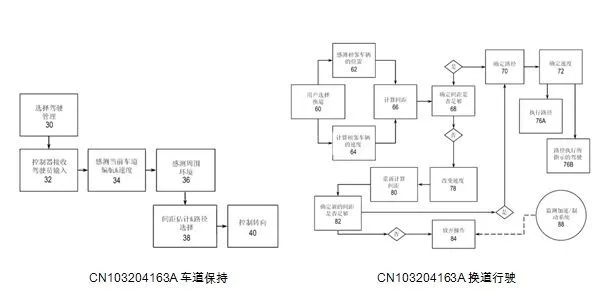
CN105059287A,申請人奇瑞,獲取車輛到兩條車道邊線的距離;計算增強信號;根據獲取的所述車輛到兩條車道邊線的距離和所述增強信號,采用預設的強化學習算法確定調節策略;按照所述調節策略,調節所述車輛的行駛軌跡。本發明的車道保持方法可以適用于各種路況,工作狀體穩定,而且車輛再次遇到相同條件時,可以依據存儲的調節策略來調節車輛的行駛軌跡,使得車輛能更加迅速地行駛至車道中線,進而減少調節次數,提高調節效率。
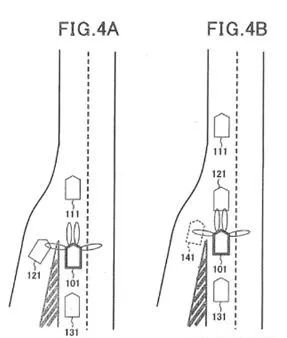
CN103748622A,申請人豐田,提供一種駕駛輔助裝置,具備:死角識別部,其識別本車輛的行進方向上的對駕駛員而言的死角;移動體信息設定部,其設定至少包含有可能從死角突然出現的移動體的估計速度的移動體信息,作為與移動體相關的信息;速度區域運算部,其基于由移動體信息設定部設定的移動體信息,來運算在沿行進方向前進的情況下本車輛有可能與移動體接觸的本車輛的速度區域;以及目標速度運算部,其基于速度區域來運算本車輛的目標速度。
變道超車
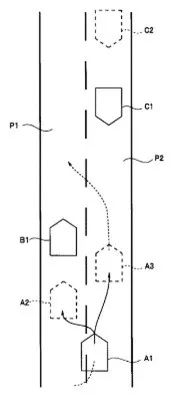
CN105216794A,申請人富士重工業株式會社,本車輛(A1)為了超越前行車輛(B1)而移動到跨越行駛車道(P1)與對向車道(P2)之間的邊界部分的(A1)位置,在對向車道(P2)檢測到對向車輛(C1)的情況下,暫時中斷超車控制。并且,在確認了對向車輛(C1)偏離的情況下,解除超車控制的中斷而執行超車,在對向車輛(C1)未偏離的情況下或雖然判定為對向車輛偏離,但是檢測到后續車輛的情況下,維持超車控制的中斷并返回到原來的行駛車道(P1)的前行車輛(B1)的后方。
WO2015096878A1,申請人沃爾沃, 涉及一種用于第一車輛的駕駛員的輔助方法,該方法包括步驟 : 使用所述設置在第一車輛上的檢測裝置來監控所述第一車輛周圍的預定區域;識別所述第一車輛前方的道路狀況和所述預定區域內的道路狀況,該道路狀況滿足預定的風險標準;識別開始動作以對第一車輛進行超車的第二車輛;以及判定所述第一車輛和/或第二車輛在該超車動作期間的碰撞風險水平。
自動泊車
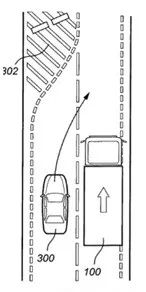
CN102016635A,申請人博世,涉及一種用于在使用至少一個第一傳感器系統(2)和至少一個第二傳感器系統(3)的情況下使機動車(1)運動、尤其是避免碰撞的駕駛員輔助方法,在障礙(31)處于第一檢測區域中期間,該第一傳感器系統在該第一檢測區域中為機動車的駕駛員提供用于障礙信息的第一障礙信息,當該障礙不再處于相對于該第一檢測區域呈大于0°的角度的第二檢測區域中時,該第二傳感器系統也在該第二檢測區域中提供第二障礙信息。
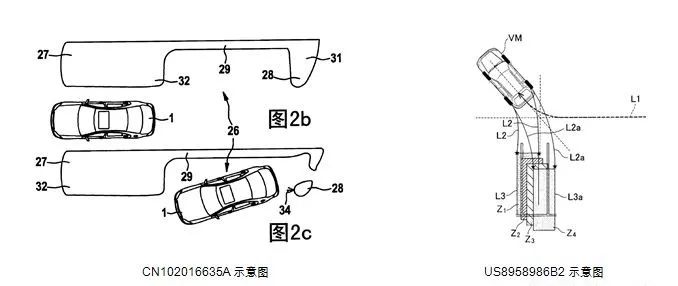
US8958986B2,申請人豐田,一種泊車輔助裝置,其包括顯示本車后方的場景圖像的顯示單元。至少當本車向前移動時或者當本車停止時,顯示單元以使得將包括多個軌跡的指示疊加在本車后方的場景圖像上的方式來顯示指示,其中,本車能夠依據這多個軌跡來從本車當前所處的地點倒退。
結論
總體而言,得益于傳感器和AI技術的日益成熟,自動駕駛經過近十年的發展,技術也已經逐漸成熟并運用在市面銷售上的整車上,對于駕駛員的行車輔助作用正在發揮越來越積極的作用。尤其是傳統的整車廠商對于自動駕駛技術的布局也非常重視,從專利申請量來看,日、德和美三國的整車廠商進行了大量的專利布局,從他們布局的技術方向來看也是在自動駕駛技術中應用最廣的ADAS技術進行了大量布局。另外,除了傳統汽車廠商外,互聯網公司也開始在自動駕駛技術上進行積極的專利布局。相較之下,中國申請人在自動駕駛技術的專利布局還相對較少,但是在中國市場上卻具有最多的自動駕駛技術專利申請,對于中國本土廠商而言應注意識別并規避其中的侵權風險。
-
adas
+關注
關注
310文章
2239瀏覽量
209840 -
自動駕駛
+關注
關注
788文章
14189瀏覽量
169408
原文標題:自動駕駛的「幕后英雄」--ADAS專利技術
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄









 工商網監
工商網監
評論