 在步進電機驅動電路設計中TB6560的應用
在步進電機驅動電路設計中TB6560的應用
引言
步進電機是一種將電脈沖轉化為角位移的執行機構。驅動器接收到一個脈沖信號后,驅動步進電機按設定的方向轉動一個固定的角度。首先,通過控制脈沖個數來控制角位移量,從而達到準確定位的目的;其次,通過控制脈沖頓率來控制電機轉動的速度和加速度,從而達到涮速的目的。目前,步進電機具有慣量低、定位精度高、無累積誤差、控制簡單等特點,在機電一體化產品中應用廣泛,常用作定位控制和定速控制。步進電機驅動電路常用的芯片有L297和L298組合應用、3977、8435等,這些芯片一般單相驅動電流在2 A左右,無法驅動更大功率電機,限制了其應用范圍。本文基于東芝公司2008年推出的步進電機驅動芯片TB6560提出了一種步進電機驅動電路的設計方案。
1步進電機驅動電路設計
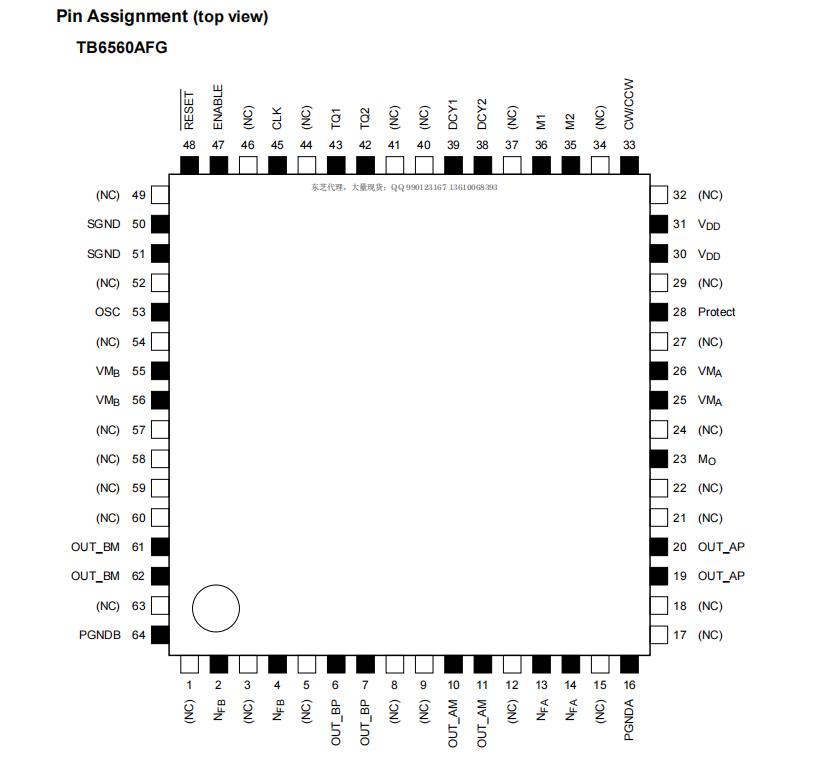
1.1 TB6560簡介
TB6560是東芝公司推出的低功耗、高集成兩相混合式步進電機驅動芯片。其主要特點有:內部集成雙全橋MOSFET驅動;最高耐壓40 V,單相輸出最大電流3.5 A(峰值);具有整步、1/2、1/8、1/16細分方式;內置溫度保護芯片,溫度大于150℃時自動斷開所有輸出;具有過流保護;采用HZIP25封裝。TB6560步進電機驅動電路主要包括3部分電路:控制信號隔離電路、主電路和自動半流電路。
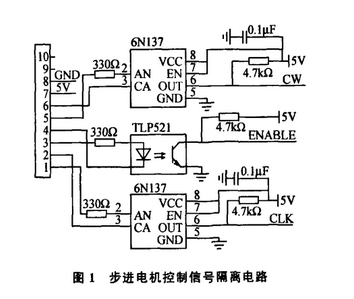
1.2步進電機控制信號隔離電路
步進電機控制信號隔離電路如圖1所示,步進電機控制信號有3個(CLK、CW、ENABLE),分別控制電機的轉角和速度、電機正反方向以及使能,均須用光耦隔離后與芯片連接。光耦的作用有兩個:首先,防止電機干擾和損壞接口板電路;其次,對控制信號進行整形。對CLK、CW信號,要選擇中速或高速光耦,保證信號耦合后不會發生滯后和畸變而影響電機驅動,且驅動板能滿足更高脈沖頻率驅動要求。本設計中選擇2片6N137高速光耦隔離CLK、CW,其信號傳輸速率可達到10 MHz,1片TLP521普通光耦隔離ENABLE信號。應用時注意:光耦的同向和反向輸出接法;光耦的前向和后向電源應該是單獨隔離電源,否則不能起到隔離干擾的作用。
1.3步進電機主電路
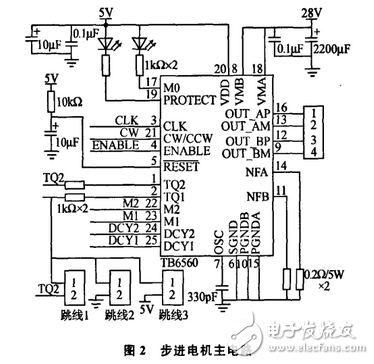
如圖2所示,步進電機主電路主要包括驅動電路和邏輯控制電路兩大部分。
驅動電路電源采用28 V,電壓范嗣為4.5~40 V,提高驅動電壓可增大電機在高頻范圍轉矩的輸出,電壓選擇要根據使用情況而定。VMB、VMA為步進電機驅動電源引腳,應接入瓷片去耦電容和電解電容穩壓。OUT_AP、OUT_AM、OUT_BP、OUT_BM引腳分別為電機2相輸出接口,由于內部集成了續流二極管,這4個輸出口不用像東芝公司的8435驅動芯片那樣外接二極管,從而極大地減小電路板的布線空間。NFA、NFB分別為電機A、B相最大驅動電流定義引腳,最大電流計算公式為IOUT(A)=0.5(V)/RNF(Ω),若預先定義電機每相的最大驅動電流為2.5 A,取RNF=0.2 Ω,則PGNDA、PGNDB、SGND分別為電機A、B相驅動引腳地和邏輯電源地。
邏輯控制電路電源為5 V,VDD為邏輯電源引腳,應接入去耦電容和旁路電容減小干擾噪聲;M0、PROTECT為工作狀態和過流保護指示燈;RESET為芯片復位腳,低電平有效;OSC所接電容的大小決定了斬波器頻率,推薦100~1 000 pF,斬波頻率為400~44 kHz;M2、M1為細分設置引腳,外接撥碼開關可設定不同的細分值,如整步、半步、1/8細分、1/16細分。由于步進電機在低頻工作時,有振動大、噪聲大的缺點,需要細分解決。
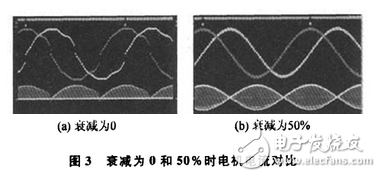
步進電機的細分控制,從本質上講是通過對步進電機勵磁繞組中電流的控制,使步進電機內部的合成磁場為均勻的圓形旋轉磁場,從而實現步進電機步距角的細分。一般情況下,合成磁場矢量的幅值決定了步進電機旋轉力矩的大小,相鄰兩合成磁場矢量之間的夾角大小決定了步距角的大小。DCY2、DCY1外接撥碼開關設置電流衰減模式(0、25%、50%、100%),用于滿足不同的步進電機需要。由于電機本身狀況、供電電源狀況及脈沖頻率等其他因素的影響,步進電機可能會產生高頻噪聲,通過電流衰減模式的設置可減小甚至消除這種噪聲。圖3顯示了衰減模式為0和50%時線圈電流的變化,可看出波形具有明顯的改善。
1.4步進電機自動半流電路
步進電機要減少發熱,就要減少銅損和鐵損。減少銅損就是減小電阻和電流,要求在選型時盡量選擇電阻小和額定電流小的電機,但是這往往與力矩和高速的要求相抵觸。對于已選定的電機,首先,應充分利用驅動器的自動半流控制功能和脫機功能,自動半流在電機處于靜態時自動減小電流,脫機功能是將輸出電機電流切斷;其次,細分驅動器由于電流波形接近正弦,諧波少,電機發熱也會較少。減少鐵損與電機驅動電壓有關,高壓驅動的電機雖然會帶來高速特性的提升,但也帶來發熱的增加。所以應當選擇合適的驅動電壓等級,兼顧高速性、平穩性和發熱、噪聲等指標。
為盡可能減小電機發熟,需要TB6560的TQ2和TQ1引腳電平在電機工作時設置為電流輸出最大,在電機不工作時電流減半甚至更小,故稱為“自動半流電路”。用NFA、NFB定義最大輸出電流后,通過TQ2和TQ1設置電流比率輸出,設為00、01、10、11時,輸出的電流分別為最大電流的100%、75%、50%、25%。改變電機的驅動電流,也就改變了電機輸出扭矩的大小。自動半流電路設計選用可重復觸發的單穩態電路芯片74CH123,用電機的驅動脈沖CLK作為單穩態電路的觸發脈沖。單穩態電路的反向輸出接TQ2引腳,電機驅動脈沖持續時TQ2一直保持低電平,無驅動脈沖時保持高電平。在圖2電路中,TQ1連接3個跳線帽。接跳線1,TQ2、TQ1始終同為高或低電平,驅動電流在25%~100%切換;接跳線2,TQ2始終為低,電流在50%~100%切換;接跳線3,電流在25%~75%切換。可根據工作驅動電流需要選擇不同跳線。
2步進電機失步和越步問題及解決方法
步進電機中產生的同步力矩無法使轉子速度跟隨定子磁場的旋轉速度,從而引起失步。失步產生的主要原因及解決方法:
①步進電機的轉矩不足,拖動能力不夠,當驅動脈沖頻率達到某臨界值開始失步。由于步進電機的動態輸出轉矩隨著連續運行頻率的上升而降低,因而凡是比該頻率高的工作頻率都將產生失步。
有3種解決方法:可使步進電機產生的電磁轉矩增大,為此可在額定電流范圍內適當加大驅動電流;在高頻范圍轉矩不足時,適當提高驅動電路的驅動電壓;改用轉矩大的步進電動機等,也可使步進電機需要克服的轉矩減小,為此可適當降低電機運行頻率,以便提高電機的輸出轉矩。
②步進電機起動失步。由于步進電機自身及所帶負載存在慣性,當加速時間過短時會出現這一現象。應該設置合理的加速時間,使電機從低速度平穩上升到某個速度。
③步進電機產生共振也是引起失步的一個原因。步進電機處于連續運行狀態時,如果控制脈沖的頻率等于步進電機的固有頻率,將產生共振。在一個控制脈沖周期內,振動尚未得到充分衰減,下一個脈沖就已來到,因而在共振頻率附近動態誤差最大并導致步進電機失步。解決方法:減小步進電機的驅動電流;采用細分驅動方法和阻尼方法。
轉子在步進過程中獲得過多的能量時,轉子的平均速度會高于定子磁場的平均旋轉速度,使得步進電動機產生的輸出轉矩增大,從而使步進電機產生越步。
當步進電機存在越步時,可減小步進電動機的驅動電流,以便降低步進電機的輸出轉矩或使減速時間加長。
3試驗結果
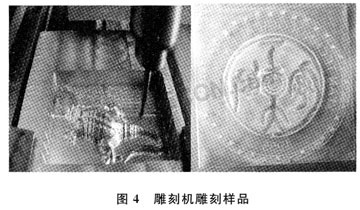
設計時應該保證芯片邏輯電壓低于驅動電壓,否則芯片不能正常工作;在選取NFA、NFB檢流電阻時應選功率不小于2 W的無感電阻;對電機驅動電源及驅動輸出連線和地的印制板布線,應保證能穩定通過3 A電流;電源入口加熔斷器保護驅動電路,以免電機的電流過大燒毀電路板。設計的驅動器應用于雕刻機X、Y、Z三軸步進電機的驅動,經過試驗,雕刻的樣品如圖4所示。從最終結果看,精度滿足目標要求。

結語
本文提出了基于TB6500的步進電機驅動電路設計方案,并給出了步進電機失步和越步問題的解決方法。試驗證明,效果良好,達到預期目標。
-
步進電機
+關注
關注
152文章
3155瀏覽量
149093 -
TB6560
+關注
關注
0文章
8瀏覽量
18474 -
步進電機驅動
+關注
關注
1文章
43瀏覽量
14980
發布評論請先 登錄
初步習作,TB6560驅動3D圖
如何用5V的51單片機驅動步進電機呢?
東芝TB6560AHQ/AFG步進電機驅動IC:解鎖卓越的電機控制性能





 工商網監
工商網監
評論