") 什么叫做RAC?和RTK對(duì)比有什么差距?
什么叫做RAC?和RTK對(duì)比有什么差距?
“對(duì)于衛(wèi)星定位導(dǎo)航來(lái)講,高精度早就實(shí)現(xiàn)了,也很成熟;低成本有大量的定位傳感器在市場(chǎng)上已經(jīng)做的非常便宜了。”博盛尚CEO申研表示,但是高精度,低成本要同時(shí)實(shí)現(xiàn),這就是我們希望能夠用我們的技術(shù)做一些新的嘗試。博盛尚是一家技術(shù)型的企業(yè),我們致力于提供高精度低成本的衛(wèi)星定位技術(shù)及產(chǎn)品。
在自動(dòng)駕駛或者說(shuō)智能汽車(chē)當(dāng)中,羅列了很多的傳感器,這個(gè)金字塔圖羅列了激光雷達(dá),毫米波雷達(dá),攝像頭,包括陀螺儀、加速器等等傳感器,我們發(fā)現(xiàn)從定位精度上面,塔尖上是激光雷達(dá),它的精度最高。衛(wèi)星定位是在塔的底部,因?yàn)樗亩ㄎ痪葘?shí)際上跟其他傳感器來(lái)講的話(huà),并不是很高。
但是在所有的自動(dòng)駕駛方案里面,GPS也就是衛(wèi)星定位還有不可替代的作用。但為什么講它的定位精度好像是比其他的傳感器差呢?因?yàn)樗?a target="_blank">信號(hào)實(shí)際上是來(lái)自于萬(wàn)里之外的外太空。
我們知道GPS的誤差有多種的因素,像軌道的中差,中間信號(hào)傳統(tǒng)電離層還要有偏差,到了對(duì)流層有延遲,到達(dá)地面穿過(guò)樹(shù)木、建筑物的遮擋、反射,都是造成信號(hào)偏差的來(lái)源。
到了終端以后,接收機(jī)終端又有本身電路的噪聲所產(chǎn)生的偏差,所以造成了普通GPS定位有十米左右的定位偏差,比起其他傳感器是比較差的,似乎對(duì)自動(dòng)駕駛來(lái)說(shuō)起不到很大的作用。
但是GPS作為衛(wèi)星定位,在自動(dòng)駕駛領(lǐng)域有一個(gè)不可替代的地位和作用,我們有高精度地圖,或者說(shuō)有其他的傳感器存在,但是你總有極端的條件你是不可以從環(huán)境感知上面去找到車(chē)輛準(zhǔn)確的位置的。
這個(gè)時(shí)候衛(wèi)星定位它的信號(hào)源遠(yuǎn)在萬(wàn)里之外的太空,它提供的信號(hào)能夠給你提供一個(gè)絕對(duì)的坐標(biāo),這個(gè)時(shí)候它就是一個(gè)唯一可靠的方式。
而且我們看到所有的空間傳感器里面,真正能夠體現(xiàn)出絕對(duì)坐標(biāo)、絕對(duì)位置的只有衛(wèi)星定位,其他這些傳感器實(shí)際上都是一個(gè)相對(duì)距離的探測(cè)。
我們?cè)谥悄芷?chē)的這樣一個(gè)應(yīng)用場(chǎng)景下,關(guān)鍵就在于我們?cè)鯓诱业揭粋€(gè)平衡,在用戶(hù)所要求的這樣一個(gè)精度,和衛(wèi)星定位本身能夠提供的這樣一個(gè)定位誤差之間找到一個(gè)平衡。
這種平衡,我認(rèn)為是來(lái)自于這四個(gè)緯度,精度、成本、使用范圍、可用性。
精度上面我們都可以找到解決方案,利用差分技術(shù)精度可以達(dá)到厘米級(jí),這是成熟的,但是它的成本是非常高的。可用性和使用范圍也有一定的局限性。而低成本的定位,我剛才講這種十米級(jí)的定位精度顯然不能適應(yīng)我們自動(dòng)駕駛,哪怕是車(chē)聯(lián)網(wǎng)這樣的應(yīng)用。
舉個(gè)例子,比如說(shuō)我們有這樣一種應(yīng)用場(chǎng)景可能是衛(wèi)星定位能夠起到作用的,利用高精度地圖的基礎(chǔ)上,至少是車(chē)道的高精地圖。
我們可以用車(chē)道的高精度定位,結(jié)合高精度地圖進(jìn)行一個(gè)車(chē)道的規(guī)劃和預(yù)警,使自動(dòng)駕駛車(chē)輛的決策系統(tǒng)在它需要判斷的一個(gè)應(yīng)用場(chǎng)景下來(lái)對(duì)汽車(chē)做一個(gè)決策,找到它落地的場(chǎng)景。
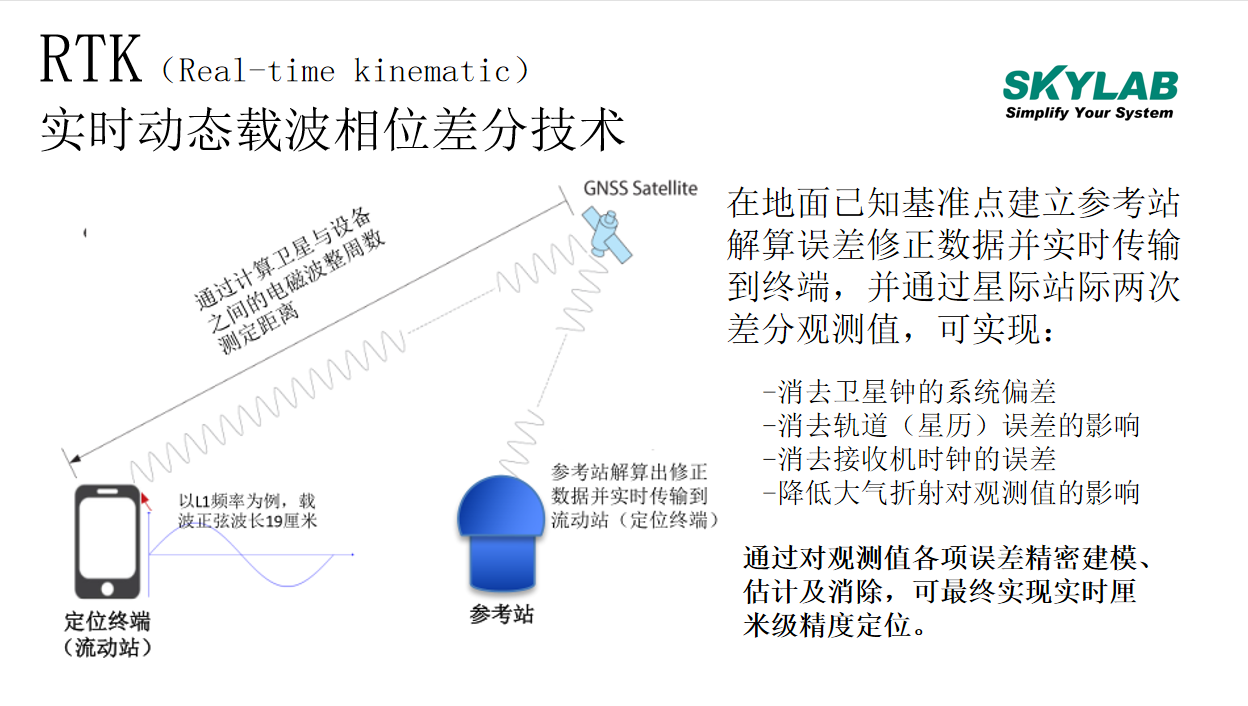
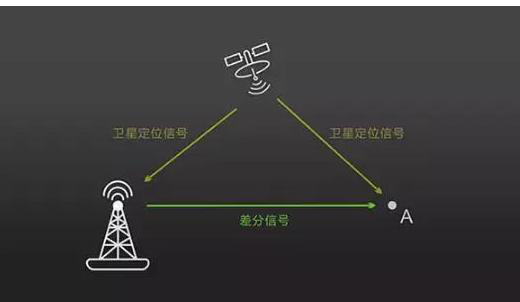
我們?yōu)榱藢?shí)現(xiàn)高精度的定位,幾十年來(lái)成熟的方案是用這種差分的技術(shù),也就是一套地基增強(qiáng)和星基增強(qiáng)的系統(tǒng)支持,來(lái)獲得一米以下的定位精度。
但是它的痛點(diǎn)就在于建設(shè)、維護(hù)和使用地基的增強(qiáng)系統(tǒng)或者網(wǎng)絡(luò)是需要非常巨大的成本的,導(dǎo)致在用戶(hù)端有這么幾個(gè)痛點(diǎn)存在。
首先是硬件非常貴,這個(gè)大家可能有這個(gè)體會(huì)。另外是需要繳服務(wù)費(fèi)的,這個(gè)服務(wù)費(fèi)實(shí)際上是給提供差分服務(wù)的運(yùn)營(yíng)商的。除了修正值你需要繳費(fèi)之外,在用戶(hù)端和增強(qiáng)系統(tǒng)之間進(jìn)行數(shù)據(jù)傳輸,這個(gè)信道的費(fèi)用也是一筆客戶(hù)端的成本。
而且使用范圍是有局限的,它必須是要在差分站的覆蓋范圍內(nèi)。單站來(lái)講它是一個(gè)局限的范圍,一般是10公里到30公里的區(qū)域,廣域的差分就是盡量多、盡量密的建設(shè)網(wǎng)絡(luò),但實(shí)際上這個(gè)反過(guò)來(lái)的建設(shè)成本和運(yùn)營(yíng)成本都是巨大的。
同時(shí),現(xiàn)在的商業(yè)模式,它也是最終要從用戶(hù)身上去收費(fèi)的。
全球范圍內(nèi)可以使用的衛(wèi)星定位信號(hào)有很多,大家不是專(zhuān)業(yè)的話(huà)可能感受不到,這個(gè)信號(hào)其實(shí)是非常多的,包括伽利略、北斗等等。每個(gè)衛(wèi)星定位擁有多頻的信號(hào)存在,這個(gè)都給我們提供這樣的資源。
但是實(shí)際上我們大家每天在用到的,其實(shí)就是一個(gè)信號(hào),就是在左上角那個(gè),GPS的信號(hào),當(dāng)然也有北斗的信號(hào)。
這些全球隨處可得的免費(fèi)的信號(hào),有全世界最成熟、最便宜的硬件產(chǎn)業(yè),比如芯片模塊、接收機(jī)等等,所以要把這個(gè)成本降下來(lái)的話(huà),博盛尚就是要在這種資源上做努力,把高精度實(shí)現(xiàn)。
博盛尚向市場(chǎng)推出了一種新型的RAC高精度衛(wèi)星定位接收機(jī),其特點(diǎn)是不使用任何差分技術(shù)及慣導(dǎo),僅采用普通民用信號(hào),也就是普通的L1信號(hào)或者北斗B1,就能實(shí)現(xiàn)優(yōu)于一米的定位精度,亞米級(jí)到分米級(jí)的定位精度。
這項(xiàng)技術(shù)擺脫了對(duì)地基、星基增強(qiáng)網(wǎng)的依賴(lài)又大幅降低了成本,這樣一個(gè)衛(wèi)星定位的方案在市場(chǎng)上已經(jīng)存在了。
什么叫做RAC?RAC實(shí)際上叫Realtime Array Calibration,這是博盛尚創(chuàng)造的定位專(zhuān)業(yè)名詞,它是通過(guò)一種天線(xiàn)陣列的排布,使用單頻民用信號(hào),通過(guò)實(shí)時(shí)的計(jì)算,再加上一種環(huán)形校準(zhǔn)的方法,可以大幅度的提高定位精度。
它的應(yīng)用面比較廣,作為一種基礎(chǔ)的傳感器,物聯(lián)網(wǎng)當(dāng)中的位置服務(wù)它的應(yīng)用是無(wú)處不在,主要是低成本去提高精度。我們目前主打的產(chǎn)品是定位精度亞米級(jí)的產(chǎn)品,目前可以定位20到60厘米,達(dá)到95%的概率。
我們和RTK的設(shè)備進(jìn)行對(duì)比,很明顯RTK的設(shè)備首先天線(xiàn)必須放在車(chē)外,這個(gè)對(duì)于我們來(lái)講是沒(méi)有這樣限制的。
在城市環(huán)境下出現(xiàn)金屬的遮擋,RAC的技術(shù)是能夠穿過(guò)的,但是RTK就不可以。比如我們?cè)诟劭冢厦娑际墙饘僬趽酰車(chē)钟屑b箱反射的場(chǎng)景下,RAC跟實(shí)際的對(duì)比也是吻合的,保持一個(gè)車(chē)道。
還有一個(gè)典型的場(chǎng)景,在城市高架橋下面的時(shí)候,很多人會(huì)問(wèn)這個(gè)GPS還有沒(méi)有信號(hào),RTK會(huì)產(chǎn)生校驗(yàn),因?yàn)樗鼤?huì)有遮擋,RAC技術(shù)是能夠保證平滑的穿過(guò)。
同時(shí),RAC的技術(shù)就是一個(gè)全方位,全球化的應(yīng)用,沒(méi)有什么限制,在美國(guó)的測(cè)試和國(guó)內(nèi)是一樣的,有的時(shí)候還要更好一點(diǎn)。
跟RTK技術(shù)做一個(gè)對(duì)比,從使用范圍上來(lái)講,RAC是全球任何地點(diǎn)可用,修正值是不需要的,流量費(fèi)也不需要,車(chē)頂天線(xiàn)我們也是不需要的,在橋下、樹(shù)下遮擋也比RTK可用性更強(qiáng),聯(lián)網(wǎng)步驟這些是不需要的,而且存在高動(dòng)態(tài)的應(yīng)用空間。
最后我做一個(gè)總結(jié),什么場(chǎng)景是用RAC的,第一是沒(méi)有增強(qiáng)網(wǎng)覆蓋,你需要取得高精度定位的時(shí)候,或者說(shuō)增強(qiáng)網(wǎng)在當(dāng)?shù)夭煌晟频臅r(shí)候。第二個(gè)是有增強(qiáng)網(wǎng),出于某種原因不想使用,可以嘗試使用RAC。
-
gps
+關(guān)注
關(guān)注
22文章
2955瀏覽量
168428 -
RTK
+關(guān)注
關(guān)注
8文章
146瀏覽量
37971 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
788文章
14177瀏覽量
169287
原文標(biāo)題:做自動(dòng)駕駛都知道RTK,你有聽(tīng)說(shuō)過(guò)RAC嗎?| GGAI開(kāi)發(fā)者大會(huì)
文章出處:【微信號(hào):ilove-ev,微信公眾號(hào):高工智能汽車(chē)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
GPRS/CDMA數(shù)傳終端在GPS RTK測(cè)量行業(yè)應(yīng)用方案
熟悉RTK算法原理和調(diào)試
投影機(jī)對(duì)比度:究竟差距有多大
基于DG和RAC的電力營(yíng)銷(xiāo)數(shù)據(jù)災(zāi)備技術(shù)_張濤
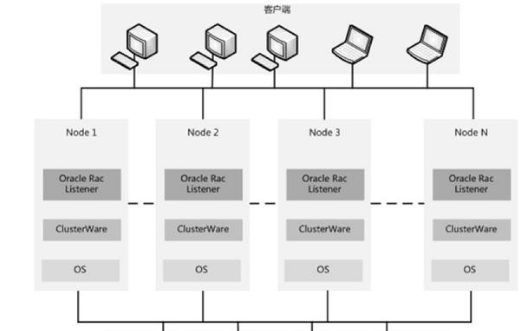
Oracle RAC原理及其詳細(xì)解讀
麒麟970和麒麟960跑分_麒麟970和960性能差距_麒麟970和麒麟960區(qū)別對(duì)比評(píng)測(cè)

博盛尚科技向市場(chǎng)推出一種新型的RAC高精度衛(wèi)星定位接收機(jī)
什么是RTK?支持RTK的高精度定位模塊有哪些?
Oracle RAC集群結(jié)構(gòu)的特點(diǎn)和缺點(diǎn)
什么是RTK?GPS與RTK有什么區(qū)別
詳細(xì)解析RAC定位
什么是RTK定位 網(wǎng)絡(luò)RTK vs 傳統(tǒng)RTK對(duì)比
什么是RTK?RTK的原理是什么?RTK對(duì)于無(wú)人機(jī)來(lái)說(shuō)有什么用?





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論