") 網(wǎng)絡(luò)的功能安全要求
網(wǎng)絡(luò)的功能安全要求
寫完關(guān)于機器人、協(xié)作機器人和移動機器人(功能安全與人工智能 )的功能安全要求的博客之后,我認(rèn)為談?wù)劸W(wǎng)絡(luò)的功能安全要求會很有意思。這兩個主題是相互關(guān)聯(lián)的,因為大部分機器人都會聯(lián)網(wǎng),機器人是工業(yè)4.0的重要組成部分。
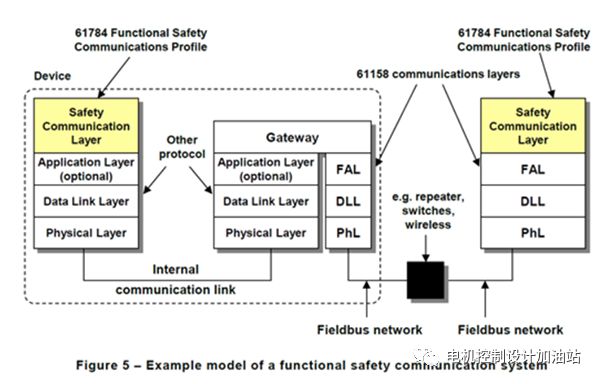
IEC 61508中提到網(wǎng)絡(luò)的地方不多,僅IEC 61508-2:2010第7.4.11條提供了一些指導(dǎo),其中提出了白通道和黑通道方法,并讓用戶參閱IEC 61784-3或IEC 62280系列。使用白通道方法,包括兩端通信設(shè)備在內(nèi)的整個網(wǎng)絡(luò)都按照相關(guān)功能安全標(biāo)準(zhǔn)進行開發(fā)。這將涉及到很多工作,并且會限制標(biāo)準(zhǔn)網(wǎng)絡(luò)組件的使用。更常用的方法是使用黑通道,關(guān)于通道不做任何假設(shè),通過應(yīng)用軟件中的附加SCL(安全通信層)來處理安全事宜。此SCL是按照安全標(biāo)準(zhǔn)開發(fā)的,但通信系統(tǒng)中的其他部分完全是標(biāo)準(zhǔn)組件。下圖摘自IEC 61784-3標(biāo)準(zhǔn)。
IEC 61784-3是現(xiàn)場總線標(biāo)準(zhǔn),IEC 62280系列(也稱為EN 50159)涵蓋了列車。EN 50159給出了一系列威脅,并列出了針對這些威脅的可能防御措施。對于每種威脅,SCL必須實施至少一項防御措施,參見下文。
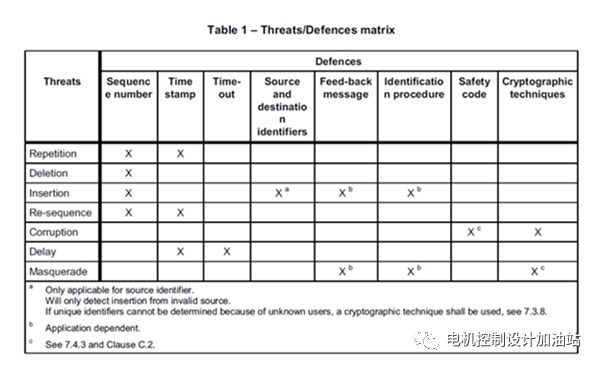
為了機器的安全,超時防御措施特別值得關(guān)注。它有效地實現(xiàn)了一個看門狗定時器,因此,假如一個機器人沒有收到通信,那么經(jīng)過指定的時間間隔之后,它就會將機器人置于安全狀態(tài)。
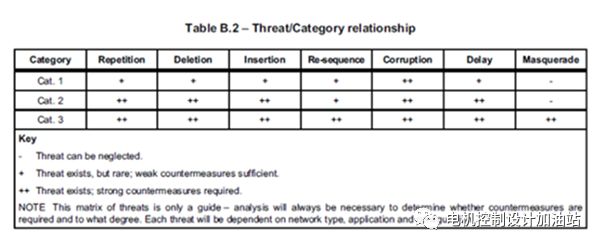
另外,EN50159的表B.2很有意義。它列出了各種類型的網(wǎng)絡(luò),并將每種威脅標(biāo)識為可以忽略、需要某種保護或需要強有力的對策。1類網(wǎng)絡(luò)可以被認(rèn)為是機器人或協(xié)作機器人內(nèi)部的封閉網(wǎng)絡(luò),或者可能是模數(shù)轉(zhuǎn)換器與本地微控制器之間的接口。1類網(wǎng)絡(luò)具有已知且固定的最大用戶數(shù)量,未授權(quán)訪問的機會有限。另一方面,3類網(wǎng)絡(luò)比如可能無線網(wǎng)絡(luò)之類的東西,與有線網(wǎng)絡(luò)相比,這類網(wǎng)絡(luò)通常具有更多未授權(quán)訪問的機會。
白通道方法并未廣泛使用,但我不知道諸如TSN(時間敏感網(wǎng)絡(luò))等新要求是否會改變這一點。這很適合作為未來博客的一個主題。
我努力尋找與功能安全和網(wǎng)絡(luò)相關(guān)的優(yōu)秀視頻——這次比平常更難找到。
-
機器人
+關(guān)注
關(guān)注
213文章
29463瀏覽量
211481 -
模數(shù)轉(zhuǎn)換器
+關(guān)注
關(guān)注
26文章
3294瀏覽量
127943
原文標(biāo)題:功能安全與網(wǎng)絡(luò)
文章出處:【微信號:motorcontrol365,微信公眾號:電機控制設(shè)計加油站】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
高空作業(yè)平臺常見的安全要求與措施的驗證
功能安全與網(wǎng)絡(luò)
功能安全與安防
約旦LED燈性能、安全要求及能效測試內(nèi)容
怎樣去滿足ADAS應(yīng)用程序的特殊安全要求?
電器設(shè)施設(shè)備配置安全要求說明
SoC平臺安全要求1.0
逆變器的工作原理和安全要求
混合動力電動汽車安全要求
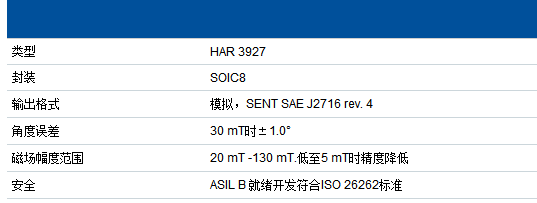
TDK針對高安全要求的應(yīng)用推出基于3D HAL?技術(shù)的帶冗余功能的位置傳感器





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論