 南京理工大學:研發柔性機械傳感器表界面微結構-面向軟體機器人
南京理工大學:研發柔性機械傳感器表界面微結構-面向軟體機器人

柔性傳感器的集成對于軟體機器人在復雜變形(如彎曲、扭轉、壓縮、拉伸等)以及與非結構化環境的交互過程中執行特定任務至關重要。然而,由于軟體機器人的高靈活性、變形能力和多自由度,構建高性能的柔性傳感器仍然是一個重大挑戰。一種有效的方法是將軟機器人的連續變形轉換為離散表示,這使科學家們能夠更好地理解變形過程,并明確表面和界面對傳感器性能的影響。因此,可以使用智能算法進一步優化傳感器的數量和排列,從而提高整個系統的效率和性能。 重點研究了表面界面構造對柔性傳感器性能的影響。首先,基于柔性傳感器的基本分類,作者系統地分析了柔性傳感器表面和界面的構建策略,包括表面結構優化、微結構陣列設計和空隙結構。其次,作者詳細討論了不同表面和界面的制備方法。然后,探討了柔性傳感器在多個領域的廣泛應用。最后,作者總結并展望了柔性傳感器的未來發展方向。 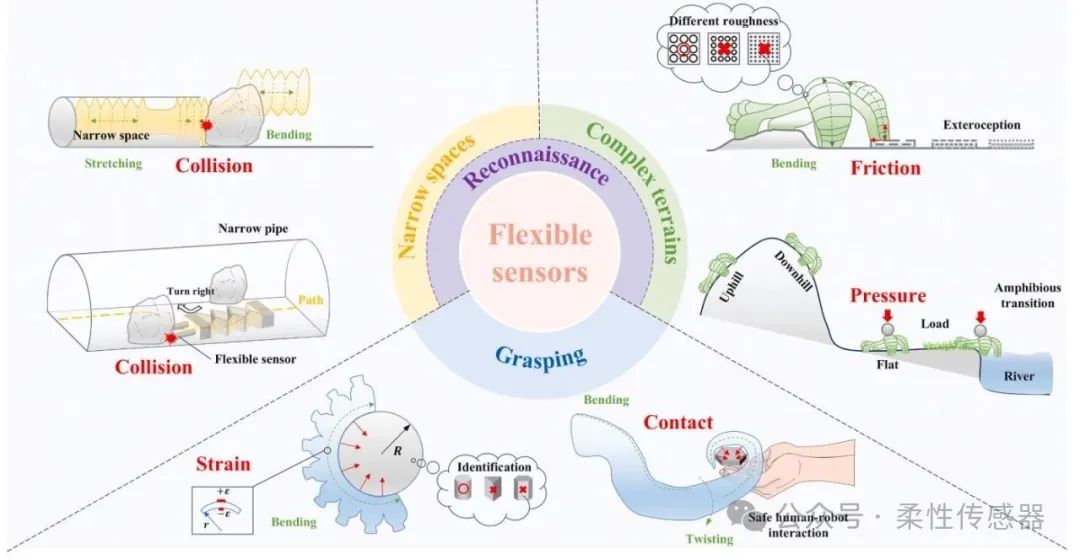 圖1?軟體機器人在抓取和偵察(包括復雜地形、狹窄空間等環境)領域的應用
圖1?軟體機器人在抓取和偵察(包括復雜地形、狹窄空間等環境)領域的應用 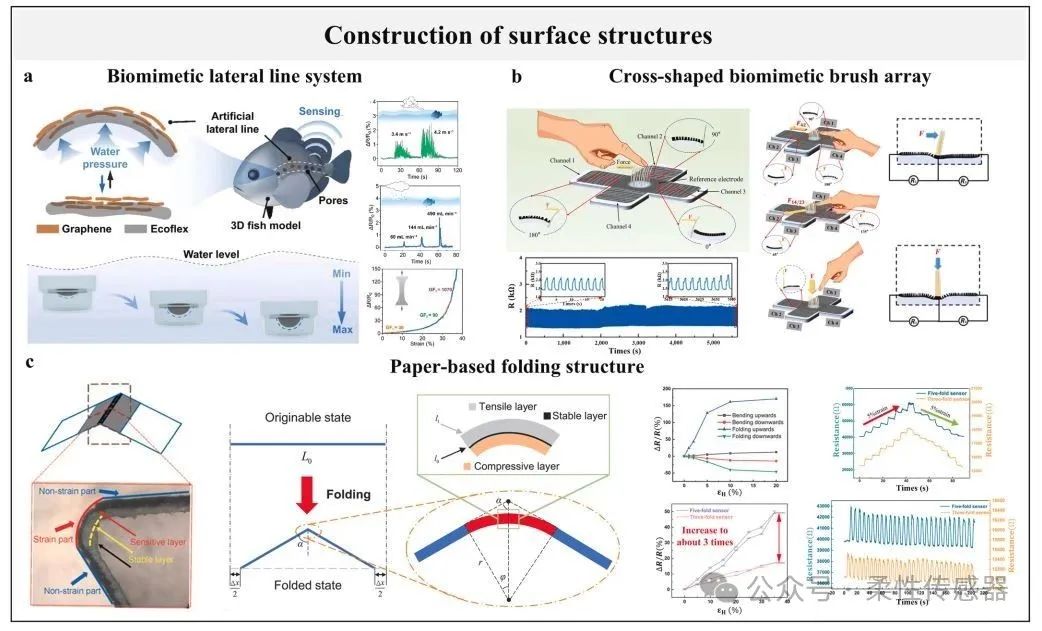 圖2?電阻式傳感器的表界面優化方法
圖2?電阻式傳感器的表界面優化方法 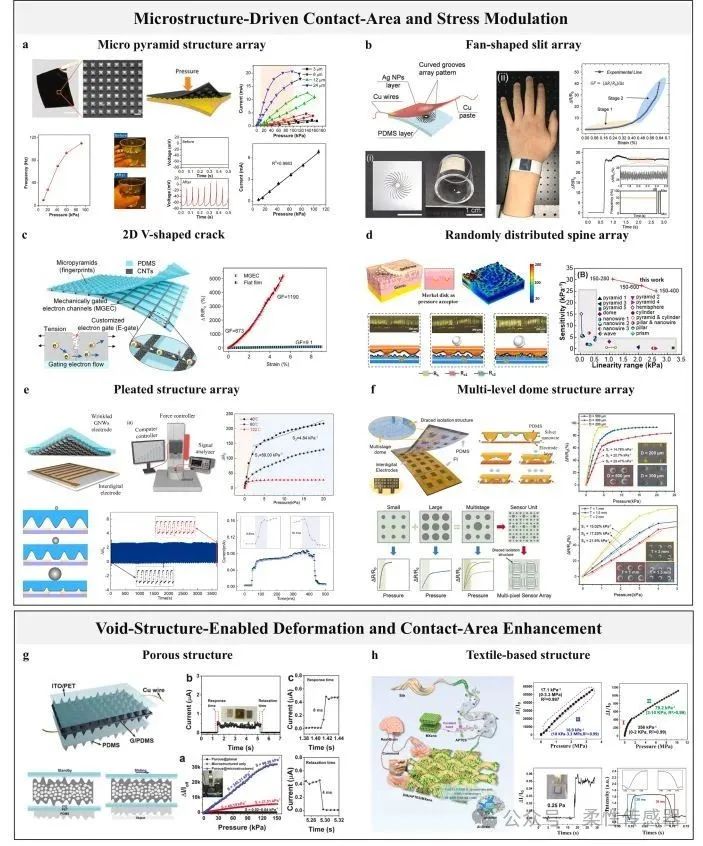 圖3?電阻式傳感器的表界面優化方法
圖3?電阻式傳感器的表界面優化方法 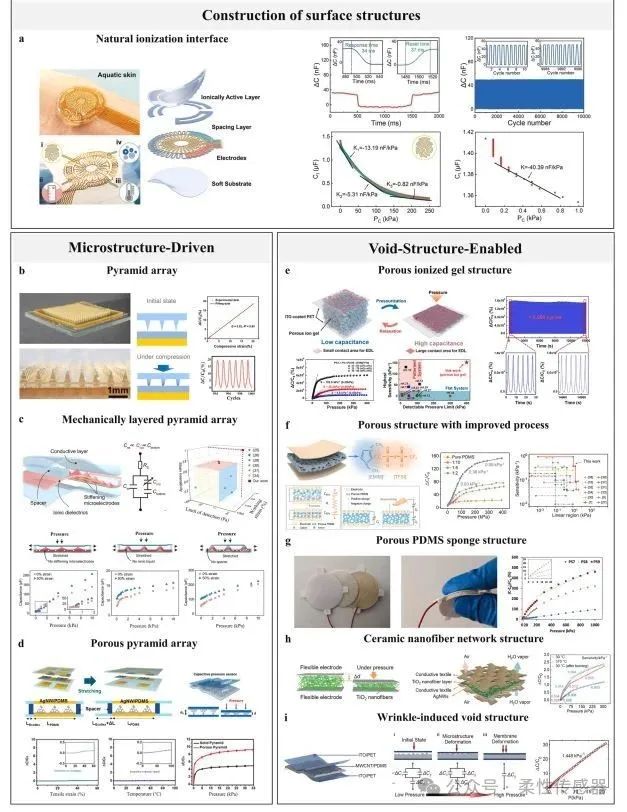 圖4?電容式傳感器的表界面優化方法
圖4?電容式傳感器的表界面優化方法 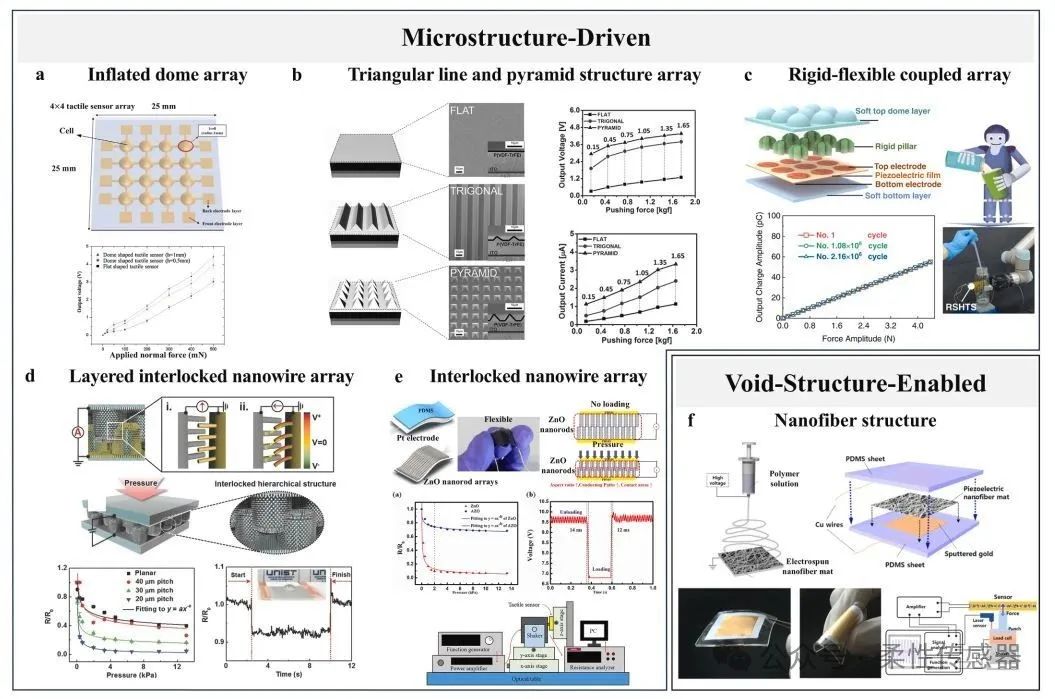 圖5?壓電式傳感器的表界面優化方法
圖5?壓電式傳感器的表界面優化方法 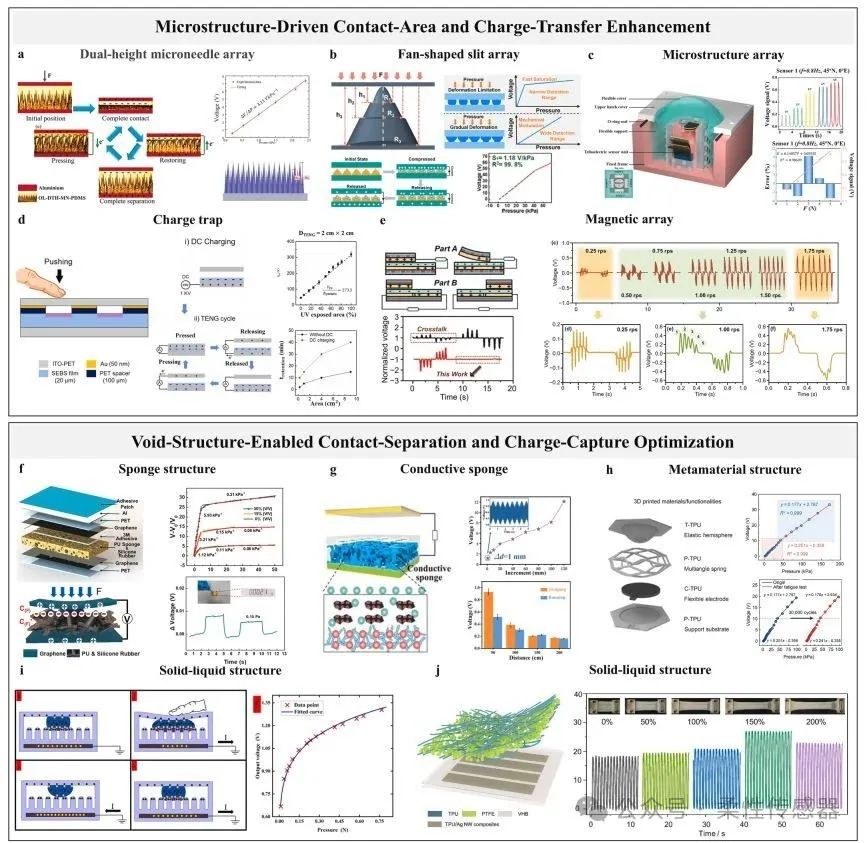 圖6?摩擦電式傳感器的表界面優化方法
圖6?摩擦電式傳感器的表界面優化方法 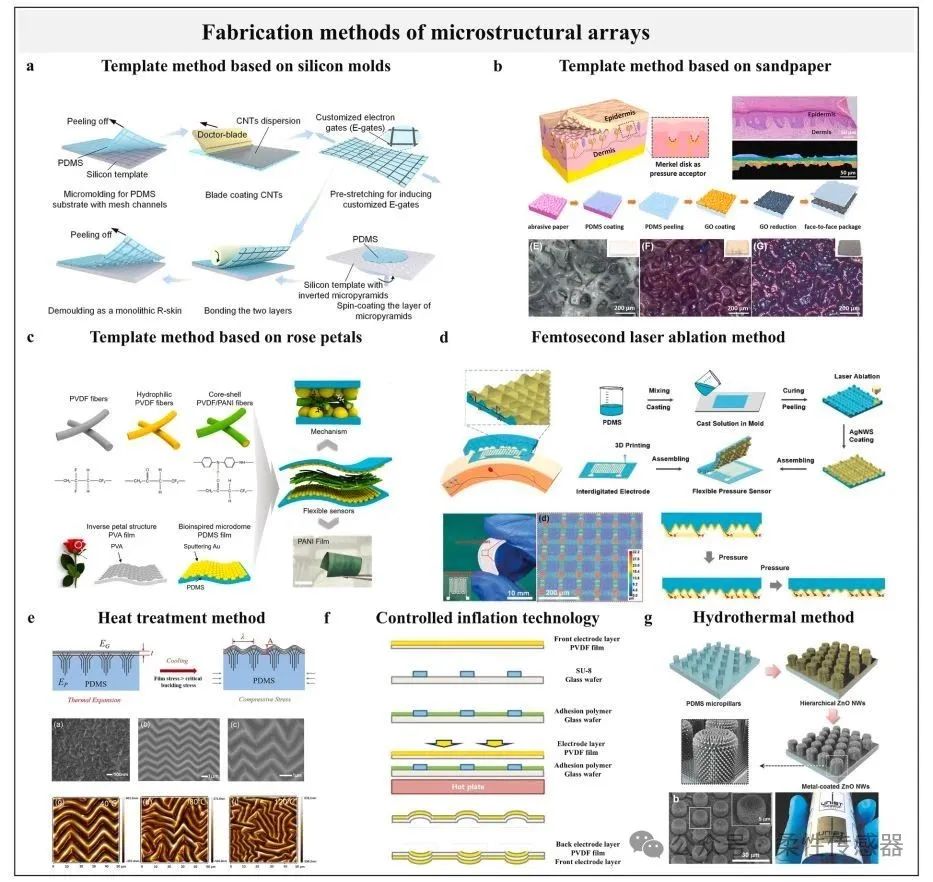 圖7?微結構陣列的制造方法
圖7?微結構陣列的制造方法 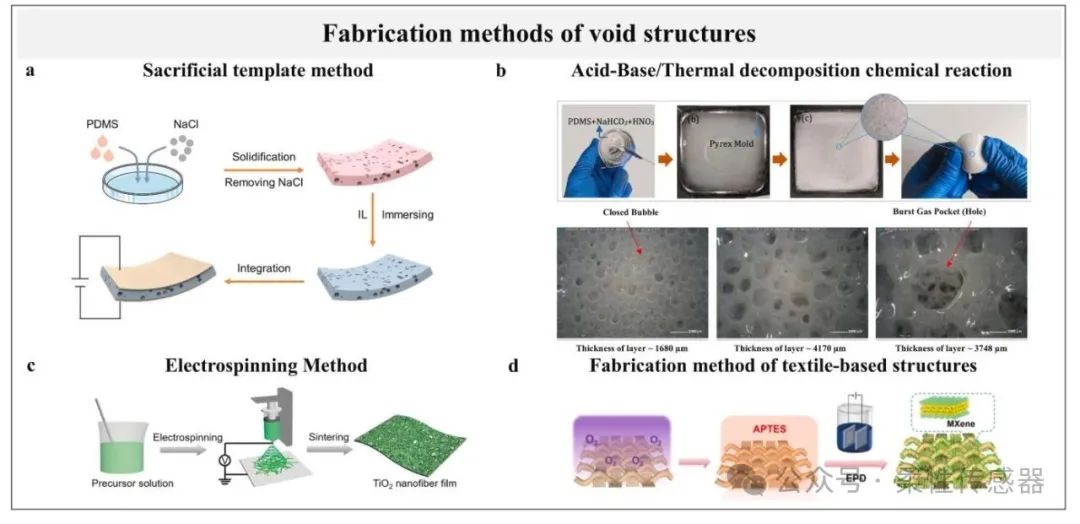 圖8?中空結構的制造方法
圖8?中空結構的制造方法 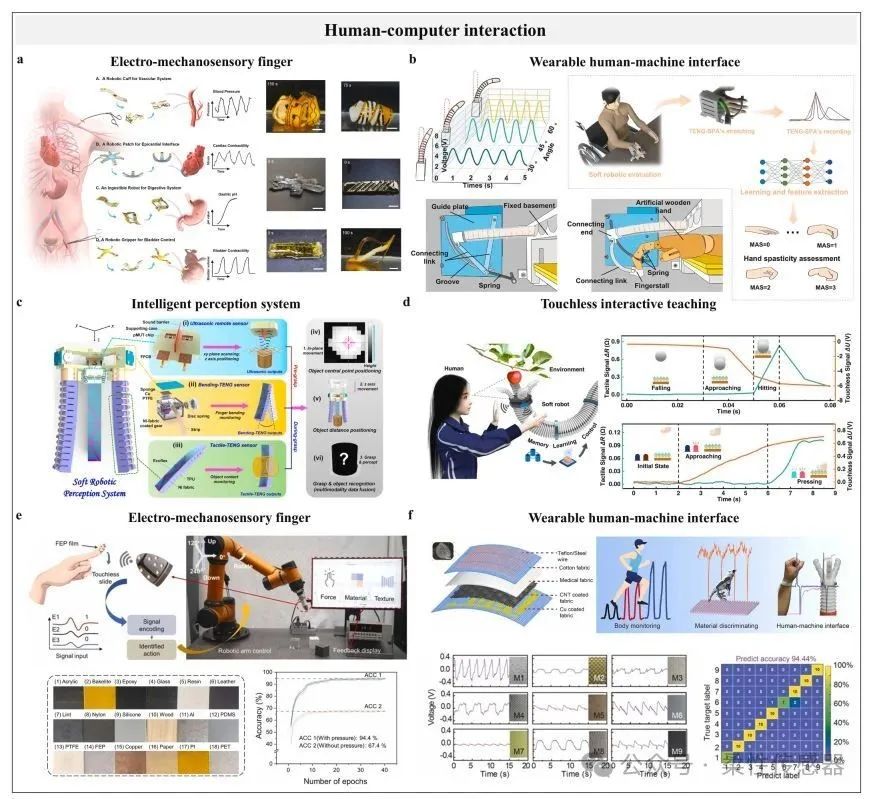 圖9?人機交互的應用場景
圖9?人機交互的應用場景 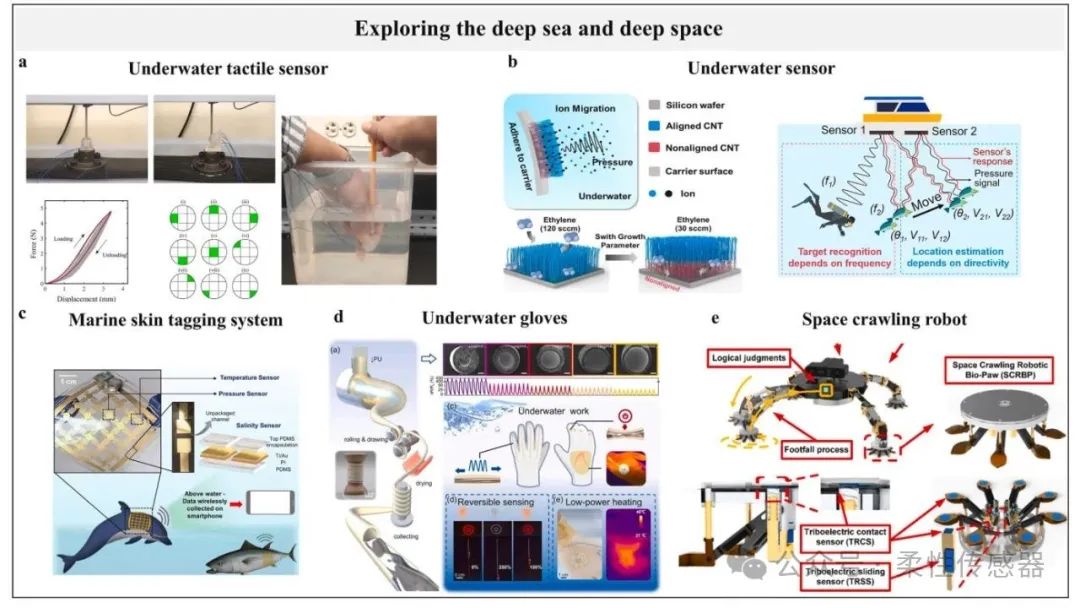 圖10?深海和深空探測領域應用場景 ? ? ? ? ? 審核編輯 黃宇
圖10?深海和深空探測領域應用場景 ? ? ? ? ? 審核編輯 黃宇
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
傳感器
+關注
關注
2567文章
53143瀏覽量
768780 -
機器人
+關注
關注
213文章
29829瀏覽量
213423
發布評論請先 登錄
相關推薦
熱點推薦
北京理工大學生命學院:研發新型電化學生物傳感器,聚焦血糖監測技術突破
detection of glucose in whole blood”的研究論文,該工作創新性地提出了一種基于Ni?(HITP)?-MOF與新型抗污材料的分子印跡電化學傳感器,實現了全血中葡萄糖的直接檢測,為生物傳感技術的發展提供了新思路與新方法。 該工作以北京

華東理工大學信息學院校友會走訪兆芯
近日,華東理工大學信息科學與工程學院(簡稱“華東理工大學信息學院)校友會組織近20名校友走訪上海兆芯集成電路股份有限公司(簡稱“兆芯”),開啟了一場兼具專業深度與實踐溫度的探“芯”之旅。
上海理工大學師生一行蒞臨意瑞半導體參觀交流
近日,上海理工大學師生42人前來參訪意瑞半導體(上海)有限公司。旨在深化校企交流,助力高校學子了解半導體行業前沿動態與企業發展實踐。
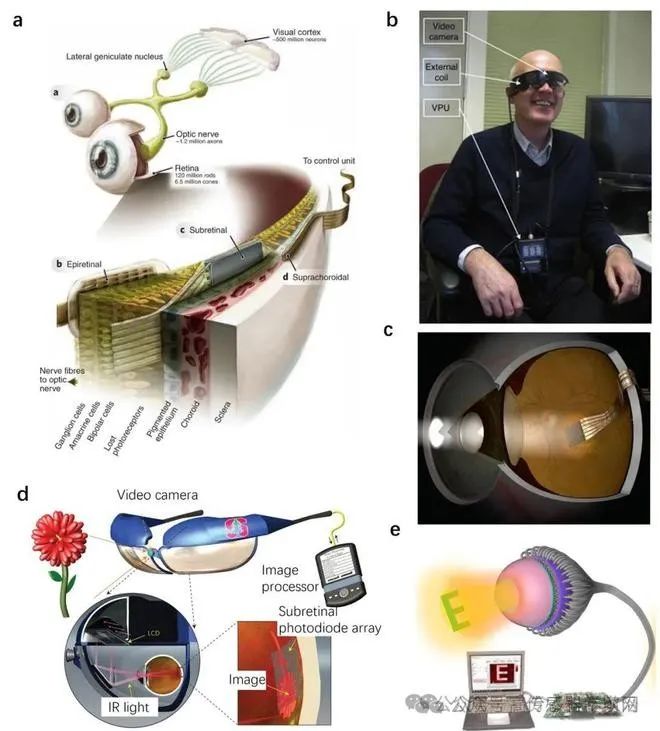
北京理工大學:研究眼機界面智能傳感硬件——從可穿戴到仿生
、功耗(SWaP)及生物兼容性上面臨瓶頸,而新型功能材料正通過柔性透明設計、多模態傳感和集成策略,推動傳感器向小型化、低功耗和高性能發展。鑒于此, 北京理工大學 沈國震 、 王卓然 團
中軟國際助力北京理工大學珠海校區展開科研創新
近日,中軟國際助力北京理工大學(珠海)基于華為云昇騰AI云服務DeepSeek滿血版大模型展開科研及教學創新。北京理工大學(珠海)經濟監督大模型團隊將DeepSeek等前沿技術應用至哲學社會科學研究中,為經濟監督更好地推動國家治理現代化及其法律保障機制的優化提供技術支撐。
天合光能與新加坡南洋理工大學簽約技術合作
近日,天合光能與享有盛譽的新加坡南洋理工大學(Nanyang Technological University)進行技術合作簽約。這一技術合作通過南洋理工大學的能源研究院(ERI@N)和電力工程中心
清華大學:軟體機器人柔性傳感技術最新研究進展
隨著機器人技術的發展,配備柔性傳感功能的軟體機器人在醫療輔助康復、水下資源勘探、陸地災難救援等領域發揮著重要作用,如何設計高性能

上汽集團與北京理工大學達成戰略合作
今天,上汽集團與北京理工大學簽署戰略合作協議。依托上汽集團在整車研發與生產制造領域的技術創新和工程應用經驗,以及北京理工大學在科技研發、人才培養、優勢學科等方面的資源,雙方將聚焦電動化
當北京理工大學方程式車隊BITFSD遇上瑞蘇盈科FPGA核心板
“世界第一支大學生無人方程式賽車隊”北京理工大學路特斯無人駕駛方程式車隊(BITFSD)隸屬于北京理工大學機械與車輛學院,是以各類創新創業大賽為牽引,邁向無人車輛高端技術前沿的科技創新

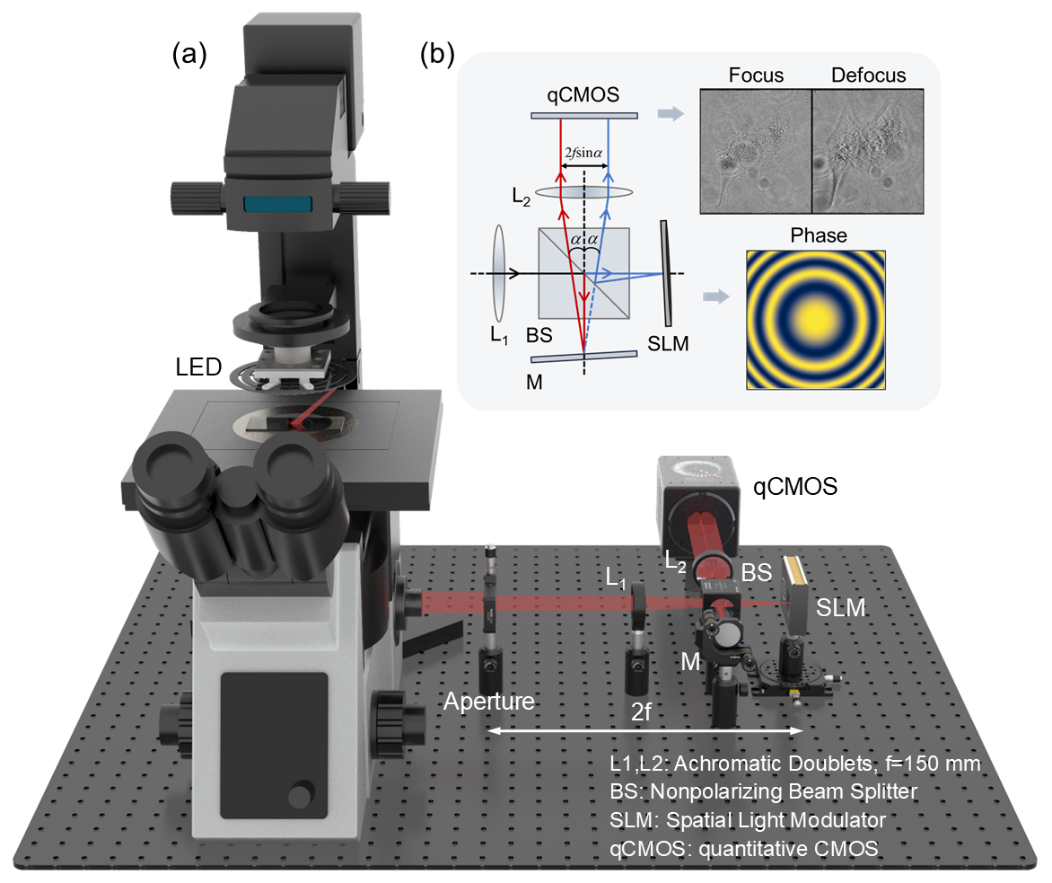
南京理工在計算光學顯微成像領域重要研究進展
圖1 BP-TIDT實驗裝置和雙平面并行檢測光路示意圖 近日,南京理工大學電子工程與光電技術學院陳錢、左超教授課題組提出了一種新型高速、高分辨率三維無標記顯微鏡技術。該工作以“High-Speed
都靈理工大學校長一行再訪SPEA
SPEA與都靈理工大學有著深厚的歷史淵源,雙方通過構建人才培養體系、推動融合創新、不斷拓寬技術應用的邊界,共同促進了自動化測試技術在半導體、MEMS傳感器、電子制造等多個關鍵領域快速發展。近日,都靈

從新加坡到深圳:南洋理工大學(NTU)與VoiceAI的深度對話
近日,來自新加坡南洋理工大學的數十名師生到訪聲揚科技深圳總部,與聲揚科技“硬核科研團”展開深度交流。公司聯合創始人、總經理張偉彬博士出席交流會,與新加坡南洋理工大學師生們探討智能語音技術的發展趨勢

OPPO與香港理工大學深化合作,升級聯合創新研究中心
11月4日,OPPO廣東移動通信有限公司(OPPO)與香港理工大學(理大)共同舉辦了一場合作續約儀式,標志著雙方將基于2022年簽署的合作協議,進一步深化在AI影像技術領域的合作。此次合作中
安徽理工大學校長袁亮院士走訪調研達實智能
安徽理工大學校黨委副書記、校長袁亮院士率隊走訪調研深圳達實智能股份有限公司。深圳達實智能股份有限公司董事長劉磅,安徽理工大學深圳校友會會長劉昂陪同調研。中國工程院院士、安徽理工大學校友陳湘生參加調研。
清華大學:軟體機器人柔性傳感技術最新研究進展
清華大學深圳國際研究生院曲鈞天助理教授的海洋軟體機器人與智能傳感實驗室(Ocean Soft-Robot and Intelligent Sensing Lab,OASIS-LAB)在






 工商網監
工商網監
評論