") 看看那些用樹莓派打造的自動(dòng)駕駛汽車!
看看那些用樹莓派打造的自動(dòng)駕駛汽車!

在嶄新的汽車時(shí)代門檻前,通往未來的道路不再僅由瀝青鋪就,還承載著人工智能(AI)的無限可能和突破性的創(chuàng)造力。
在現(xiàn)實(shí)世界中駕駛頗具挑戰(zhàn),因?yàn)榭赡軙?huì)發(fā)生各種意外事件。正因如此,打造一輛真正安全的自動(dòng)駕駛汽車,遠(yuǎn)非簡(jiǎn)單地“構(gòu)建一個(gè)擁有眾多編程規(guī)則的高級(jí)機(jī)器人”那么簡(jiǎn)單;它要求機(jī)器能夠“學(xué)習(xí)”如何應(yīng)對(duì)意外情況。
盡管這一點(diǎn)仍遠(yuǎn)未達(dá)到完美,但人工智能的持續(xù)進(jìn)步使其成為可能。人工智能的發(fā)展推動(dòng)了深度神經(jīng)網(wǎng)絡(luò)和復(fù)雜算法的研發(fā)。這些系統(tǒng)能夠從海量數(shù)據(jù)中學(xué)習(xí),識(shí)別復(fù)雜模式,并實(shí)時(shí)做出決策,使自動(dòng)駕駛汽車的處理能力日益接近人類的感知和反應(yīng)水平。
在本榜單中,我們精選了一些基于多種開發(fā)板的優(yōu)秀DIY自動(dòng)駕駛汽車項(xiàng)目。它們難度各異,無論你是初次探索自動(dòng)駕駛汽車領(lǐng)域,還是希望學(xué)習(xí)新項(xiàng)目提升技能,都能找到合適的挑戰(zhàn)。
不過,在開始之前,讓我們先了解一些關(guān)于自動(dòng)化的重要知識(shí),以及在著手這些挑戰(zhàn)前你需要考慮的事項(xiàng)。準(zhǔn)備好了嗎?出發(fā)!
既然我們討論的是適應(yīng)現(xiàn)實(shí)環(huán)境的項(xiàng)目,那么了解根據(jù)汽車工程師學(xué)會(huì)(SAE)劃分的不同自動(dòng)化級(jí)別將大有好處。這些級(jí)別包括:
0級(jí) - 無自動(dòng)化:車輛無自動(dòng)化功能。駕駛員負(fù)責(zé)所有駕駛?cè)蝿?wù),包括轉(zhuǎn)向、加速、制動(dòng)和決策。
1級(jí) - 駕駛輔助:車輛可能配備駕駛輔助系統(tǒng),如自適應(yīng)巡航控制或車道保持輔助。但駕駛員必須時(shí)刻保持警惕,隨時(shí)準(zhǔn)備接管控制。
2級(jí) - 部分自動(dòng)化:車輛能夠同時(shí)控制轉(zhuǎn)向、加速和制動(dòng),如高級(jí)駕駛輔助系統(tǒng)。但駕駛員必須雙手放在方向盤上,隨時(shí)準(zhǔn)備接管控制。
3級(jí) - 有條件自動(dòng)化:車輛在某些條件或環(huán)境下(如高速公路上)能夠自主駕駛。當(dāng)系統(tǒng)請(qǐng)求時(shí),駕駛員必須接管控制,但在系統(tǒng)運(yùn)行時(shí),駕駛員可以從事與駕駛無關(guān)的活動(dòng)。
4級(jí) - 高度自動(dòng)化:車輛能夠在多種條件和場(chǎng)景下自主駕駛,如地理圍欄區(qū)域內(nèi)(如城市區(qū)域或共享汽車區(qū)域)。駕駛員無需時(shí)刻在場(chǎng),系統(tǒng)能夠在無需人工干預(yù)的情況下處理復(fù)雜場(chǎng)景的駕駛?cè)蝿?wù)。
5級(jí) - 完全自動(dòng)化:車輛完全自主駕駛,無需駕駛員干預(yù)。無需方向盤、踏板或手動(dòng)控制裝置,車輛能夠在任何條件下無需人類駕駛員在場(chǎng)的情況下行駛。
了解了不同自動(dòng)化級(jí)別的概述后,讓我們來看看在選擇項(xiàng)目前你需要考慮哪些因素。
注意事項(xiàng)
先停下腳步,仔細(xì)閱讀!
如果你打算涉足自動(dòng)駕駛汽車領(lǐng)域,并希望復(fù)制一個(gè)涉及玩具車或機(jī)器人套件的項(xiàng)目,那么采取周密且知情的策略至關(guān)重要。雖然本文列出的想法可能乍一看似乎簡(jiǎn)單直接,但它們?yōu)槟闾剿魅斯ぶ悄芎蜋C(jī)器人技術(shù)的先進(jìn)概念提供了獨(dú)特的機(jī)會(huì)。
以下是一些重要的注意事項(xiàng),幫助你順利開始項(xiàng)目并最大化成功機(jī)會(huì):
明確目標(biāo):在開始之前,明確你希望通過項(xiàng)目實(shí)現(xiàn)什么目標(biāo)。你是對(duì)了解自主導(dǎo)航的基礎(chǔ)知識(shí)感興趣?還是希望開發(fā)一個(gè)具備對(duì)象識(shí)別和路線規(guī)劃等高級(jí)功能的更復(fù)雜系統(tǒng)?明確愿景將有助于指導(dǎo)你的硬件和軟件選擇。
選擇合適的套件或汽車:選擇合適的機(jī)器人套件或玩具車是關(guān)鍵步驟。確保你選擇的模型與你打算使用的工具和組件兼容。對(duì)于初學(xué)者來說,擁有良好文檔和社區(qū)支持的機(jī)器人套件將大有裨益,而改裝玩具車則提供了一種更加個(gè)性化和實(shí)驗(yàn)性的方法。
投資高質(zhì)量組件:為了獲得滿意的結(jié)果,選擇能夠確保可靠性能的高質(zhì)量組件。攝像頭、激光雷達(dá)和超聲波傳感器等外圍設(shè)備,以及執(zhí)行器和控制器,在構(gòu)建有效的自主系統(tǒng)中起著至關(guān)重要的作用。傳感器的準(zhǔn)確性和執(zhí)行器的穩(wěn)健性將影響車輛的精確導(dǎo)航能力。
有些項(xiàng)目極具挑戰(zhàn)性——你能勝任嗎?
學(xué)習(xí)并實(shí)驗(yàn)人工智能算法:實(shí)施人工智能算法是任何自動(dòng)駕駛汽車項(xiàng)目的核心。熟悉機(jī)器學(xué)習(xí)、圖像處理和路徑規(guī)劃算法等技術(shù)。使用流行的庫(kù)和框架,如TensorFlow、OpenCV和機(jī)器人操作系統(tǒng)(ROS),以簡(jiǎn)化集成和實(shí)驗(yàn)過程。
迭代開發(fā)與測(cè)試:從基本原型開始,在受控環(huán)境中進(jìn)行測(cè)試,然后再進(jìn)入更復(fù)雜的場(chǎng)景。在測(cè)試過程中收集數(shù)據(jù)對(duì)于微調(diào)和改進(jìn)算法以及車輛性能至關(guān)重要。根據(jù)需要審查和修改你的方法。
與社區(qū)互動(dòng):參與與機(jī)器人技術(shù)和自動(dòng)駕駛汽車相關(guān)的在線論壇可以提供寶貴的見解和支持。分享你的經(jīng)驗(yàn)可以幫助你解決問題、獲取建議,并了解最新趨勢(shì)和技術(shù)。
考慮倫理和安全問題:即使對(duì)于小型項(xiàng)目,考慮倫理和安全影響也很重要。確保你的項(xiàng)目不僅功能正常,而且以安全、負(fù)責(zé)任的方式運(yùn)行。注意傳感器收集的數(shù)據(jù)的隱私問題以及車輛的操作安全性。
遵循這些指南并采取細(xì)致入微的方法,你將能夠創(chuàng)建一個(gè)創(chuàng)新且有效的自動(dòng)駕駛汽車項(xiàng)目。記住,開發(fā)之旅既是挑戰(zhàn)也是學(xué)習(xí)機(jī)會(huì)——利用每一步來擴(kuò)展你的技能并探索新的可能性。
JetAuto ROS機(jī)器人

JetAuto提供的清晰且富有教育意義的教程也使初學(xué)者能夠輕松上手,同時(shí)提供了一個(gè)由Jetson Nano驅(qū)動(dòng)的復(fù)雜機(jī)器人技術(shù)平臺(tái)。
支持機(jī)器人操作系統(tǒng)(ROS),用戶可以預(yù)檢查運(yùn)動(dòng)算法,避免昂貴的錯(cuò)誤,并通過rviz(一個(gè)在測(cè)試機(jī)器人編程和行為時(shí)準(zhǔn)確復(fù)制現(xiàn)實(shí)世界的虛擬環(huán)境)可視化整個(gè)導(dǎo)航過程。
與激光雷達(dá)和深度攝像頭的集成尤其值得注意。借助這些技術(shù),JetAuto能夠快速準(zhǔn)確地執(zhí)行同時(shí)定位與地圖構(gòu)建(SLAM)。這意味著,即使在陌生環(huán)境中,機(jī)器人也能巧妙地規(guī)劃路徑,避開障礙物,并實(shí)時(shí)調(diào)整路線以實(shí)現(xiàn)自主駕駛并克服意外情況。
得益于眾多高級(jí)功能,從這個(gè)平臺(tái)可以學(xué)到很多東西,它還可以進(jìn)行交互、識(shí)別手勢(shì)、接收語音命令,甚至識(shí)別面部表情。
起價(jià)約400美元,這個(gè)平臺(tái)是教育AI項(xiàng)目的絕佳選擇,因?yàn)樗部梢耘c其他開發(fā)板(如Jetson Orin Nano或Raspberry Pi 5)一起使用——只需確保指定你將使用的開發(fā)板以選擇合適的套件。
難度:初學(xué)者
設(shè)計(jì)者:Hiwonder
項(xiàng)目頁面:JetAuto ROS Robot、GitHub、Hackster(評(píng)測(cè))
核心組件:SBC(Raspberry Pi 5、Jetson Nano、Jetson Orin Nano)、智能伺服、激光雷達(dá)、4個(gè)車輪、陽極氧化金屬支架、3D深度攝像頭、7英寸LCD屏幕(可選)
Deep PiCar
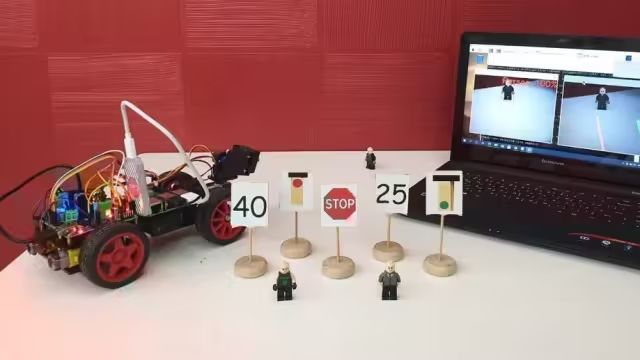
Deep PiCar是自動(dòng)駕駛汽車的小型復(fù)制品,使用樹莓派作為測(cè)試和開發(fā)自動(dòng)駕駛技術(shù)的基礎(chǔ)。
受Nvidia的DAVE-2啟發(fā),Deep PiCar采用深度神經(jīng)網(wǎng)絡(luò)執(zhí)行實(shí)時(shí)感知和控制任務(wù)。車輛配備廣角USB攝像頭和Google Edge TPU加速器,能夠快速處理機(jī)器學(xué)習(xí)推理,這對(duì)于自主導(dǎo)航至關(guān)重要。
這個(gè)項(xiàng)目的目標(biāo)是探索樹莓派通過深度學(xué)習(xí)支持自主車輛控制的能力。項(xiàng)目涉及組裝機(jī)器人套件、安裝OpenCV和TensorFlow等軟件,以及配置電子組件和電機(jī)。
汽車經(jīng)過訓(xùn)練可以識(shí)別交通標(biāo)志、檢測(cè)行人,并對(duì)特定路況做出反應(yīng),如在紅綠燈處停車或根據(jù)標(biāo)志調(diào)整速度。
該套件已更新,最新版本PiCar-X售價(jià)約90美元。這個(gè)新套件與Raspberry Pi Zero、3B、3B+、4和5兼容,并且有多個(gè)教程可供參考。
難度:中級(jí)
設(shè)計(jì)者:SunFounder
項(xiàng)目頁面:Instructables、GitHub
核心組件:Raspberry Pi(Zero W、Zero 2 W、3B、3B+、4或5)、Google Edge TPU協(xié)處理器、USB攝像頭、HDMI適配器
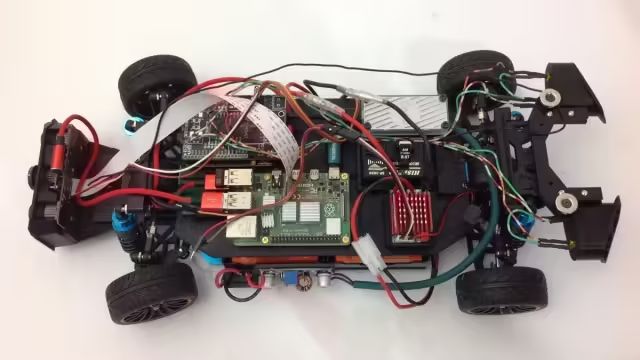
DIY AI自動(dòng)駕駛汽車

這個(gè)項(xiàng)目仍在進(jìn)行中,但如果你正在尋找一個(gè)更具挑戰(zhàn)性的冒險(xiǎn),即在一個(gè)比例模型上實(shí)現(xiàn)自動(dòng)駕駛,同時(shí)摸索算法,那么這個(gè)項(xiàng)目可能會(huì)很有趣。
汽車包括兩個(gè)攝像頭:一個(gè)配備廣角鏡頭的120萬像素?cái)z像頭,以及一個(gè)可以確定其他物體距離的立體攝像頭。它還配備了距離傳感器——可以是Sharp紅外傳感器或VL53L0激光測(cè)距模塊。
為了避免戶外測(cè)試,設(shè)計(jì)師創(chuàng)建了一個(gè)跑步機(jī),用于控制和導(dǎo)航測(cè)試。
設(shè)計(jì)師還提供了大量相關(guān)部件的設(shè)計(jì)和3D打印技巧。如果你的打印機(jī)無法勝任任務(wù),Craftcloud值得考慮。無論如何,都有大量STL文件可供復(fù)制,如果需要比PLA提供的強(qiáng)度更高,建議選擇ABS、PETG或尼龍。
目前,僅分享了項(xiàng)目硬件部分的范圍。在第64步(是的,這是一個(gè)非常詳細(xì)的教程)中,作者解釋說,與其他模型使用激光雷達(dá)不同,他選擇使用攝像頭結(jié)合Google Coral單元來高速檢測(cè)車道線、交通標(biāo)志、交通信號(hào)燈和其他物體,類似于特斯拉的方法。這只是提到的幾個(gè)方面之一,可以幫助創(chuàng)作者進(jìn)一步開發(fā)這個(gè)項(xiàng)目的軟件部分。
難度:專家
設(shè)計(jì)者:jmoreno555
項(xiàng)目頁面:Instructables、GitHub
核心組件:HSP 94123套件、Raspberry Pi 4、Wemos D1 R32、Google Coral USB、120萬像素?cái)z像頭、立體攝像頭、Sharp紅外傳感器或VL53L0激光器
原文地址:
https://all3dp.com/2/self-driving-car-projects-arduino-raspberry-pi/
-
自動(dòng)駕駛
+關(guān)注
關(guān)注
790文章
14349瀏覽量
170930 -
樹莓派
+關(guān)注
關(guān)注
121文章
2027瀏覽量
107587 -
汽車
+關(guān)注
關(guān)注
15文章
3877瀏覽量
39624
發(fā)布評(píng)論請(qǐng)先 登錄
谷歌的自動(dòng)駕駛汽車是醬紫實(shí)現(xiàn)的嗎?
汽車自動(dòng)駕駛技術(shù)
[科普] 谷歌自動(dòng)駕駛汽車發(fā)展簡(jiǎn)史,都來了解下吧!
細(xì)說關(guān)于自動(dòng)駕駛那些事兒
自動(dòng)駕駛的到來
AI/自動(dòng)駕駛領(lǐng)域的巔峰會(huì)議—國(guó)際AI自動(dòng)駕駛高峰論壇
如何讓自動(dòng)駕駛更加安全?
自動(dòng)駕駛汽車的處理能力怎么樣?
邊緣計(jì)算在自動(dòng)駕駛汽車的應(yīng)用
基于ld303+樹莓派的自動(dòng)駕駛
如何打造自動(dòng)駕駛「自行車」的呢
自動(dòng)駕駛技術(shù)的實(shí)現(xiàn)
使用樹莓派Pico做了一個(gè)自動(dòng)駕駛小車
樹莓派也能實(shí)現(xiàn)海上自動(dòng)化駕駛?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論