 Amazing Hand:一個開源的3D打印仿真機械手項目
Amazing Hand:一個開源的3D打印仿真機械手項目

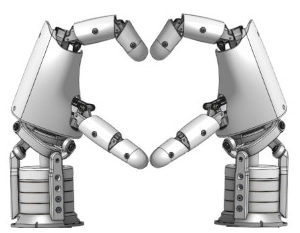
“本文介紹了一款名為 Amazing Hand 的開源仿人機械手項目。該項目旨在解決市面上機器人手普遍昂貴且表現力不足的問題,提供一個低成本(低于200歐元)、輕量化(400克)且可完全3D打印的解決方案。”
 ?
?項目采用Apache 2.0許可證
機械設計采用:知識共享署名 4.0 國際許可證。
項目倉庫:https://github.com/pollen-robotics/AmazingHand
開始前插播一個小廣告,有興趣的小伙伴可以提前報名,華秋電子的小伙伴也會在工程師嘉年華和大家一起交流 KiCad 相關的主題。

Amazing Hand 項目
機械手通常非常昂貴且表現力不足。更靈巧的手通常需要線纜和位于前臂的外部執行器。 本項目的目標是以合理的成本在真實機器人(比如 Reachy2)上探索仿人手的可能性。=> 手腕接口是為 Reachy2 的手腕(Orbita 3D)設計的,但也可以輕松適配其他機器人的手腕……
Amazing Hand 的特點是:
-
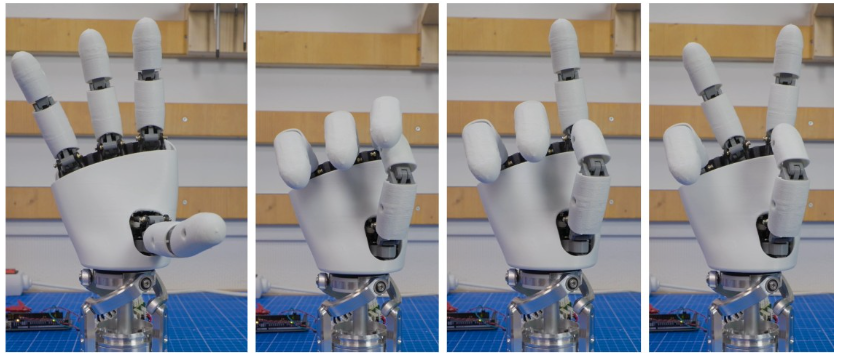
擁有 4 根手指的 8 自由度仿人手
-
每根手指有兩個關節連接的指節
-
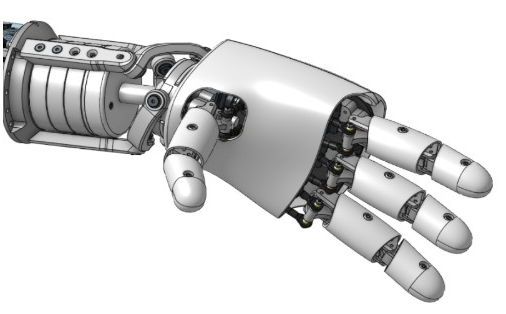
幾乎處處采用柔性外殼
-
所有執行器內置于手掌內,無需任何線纜
-
可 3D 打印
-
重量 400 克
-
低成本 (<200歐)
-
開源
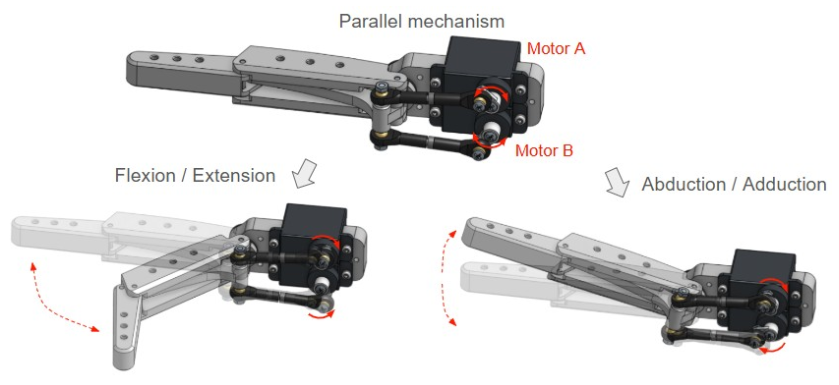
每根手指由并聯機構驅動。這意味著每根手指使用 2 個小型的 Feetech SCS0009 舵機來控制其屈伸和內收/外展。
提供兩種控制方式:
兩種方式都提供了詳細說明,并提供了基礎演示軟件。由您選擇!
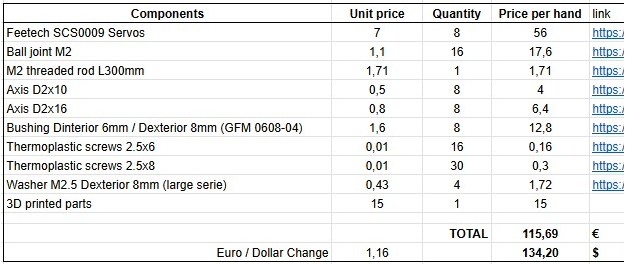
BOM
以下是 BOM 表:
https://docs.google.com/spreadsheets/d/1QH2ePseqXjAhkWdS9oBYAcHPrxaxkSRCgM_kOK0m52E/edit?gid=1269903342#gid=1269903342
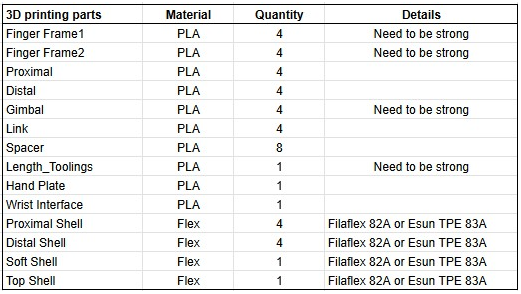
自定義 3D 打印部件的詳細信息在這兒:
https://docs.google.com/spreadsheets/d/1QH2ePseqXjAhkWdS9oBYAcHPrxaxkSRCgM_kOK0m52E/edit?gid=2050623549#gid=2050623549
以下是如何打印所有所需自定義部件的指南:
https://github.com/pollen-robotics/AmazingHand/blob/main/docs/AmazingHand_3DprintingTips.pdf
KiCad 6之后,原理圖與PCB的雙向同步可以直接進行,無需導出網表。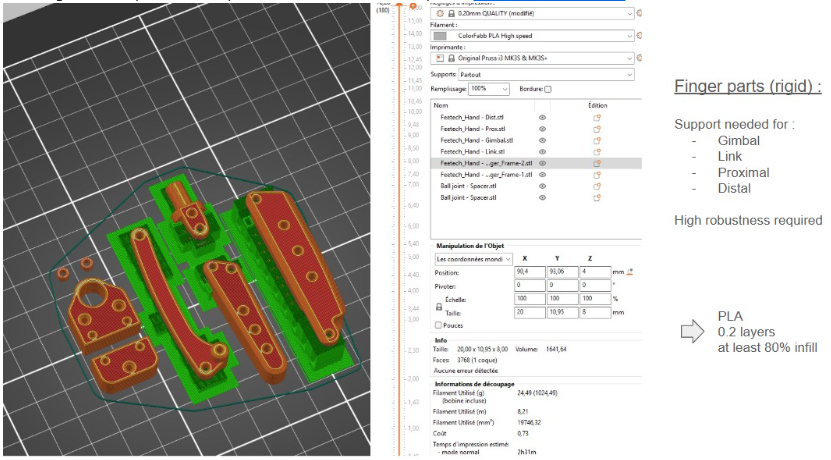
CAD 文件和 OnShape 文檔
STL 和 STEP 文件可在此處找到:
https://github.com/pollen-robotics/AmazingHand/tree/main/cad
請注意,如果您想制作左手,手指部分是相同的,但有些部件是鏡像對稱的。右手專用部件以“R”開頭,左手部件以“L”開頭。
 大家也可以訪問 Onshape 文檔:
大家也可以訪問 Onshape 文檔:https://cad.onshape.com/documents/430ff184cf3dd9557aaff2be/w/e3658b7152c139971d22c688/e/bd399bf1860732c6c6a2ee45?renderMode=0&uiState=6867fd3ef773466d059edf0c
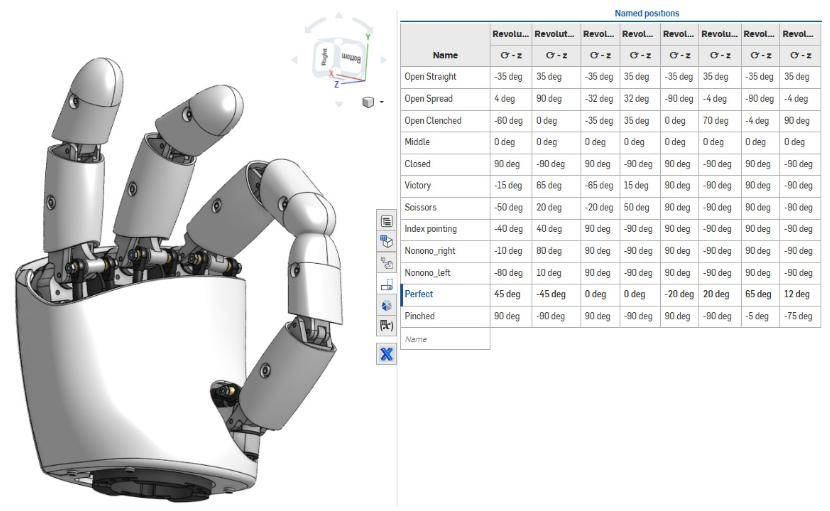
注意,在“命名位置”工具中提供了預定義位置及其對應的舵機角度。
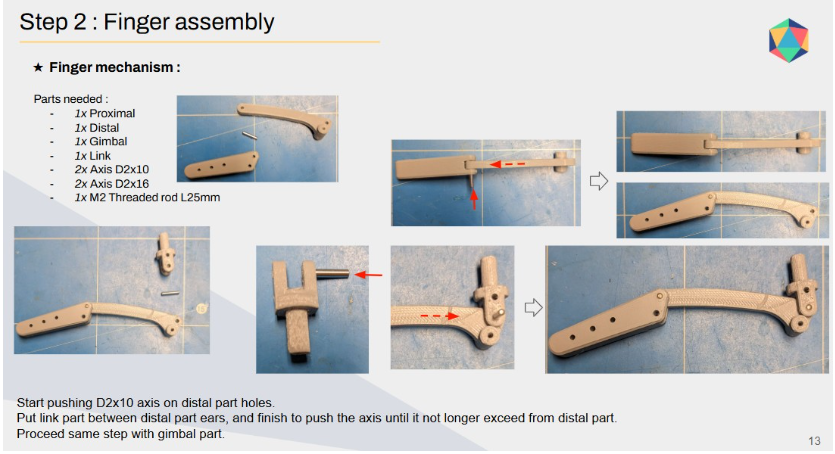
裝配指南
結合 BOM 中標準組件的 Amazing Hand 組裝指南在此處:
https://github.com/pollen-robotics/AmazingHand/blob/main/docs/AmazingHand_Assembly.pdf
您將需要簡單的程序/腳本來校準每根手指,可在此處獲取:
-
使用 Python 和 Waveshare 串行總線驅動器
-
使用 Arduino 和 TTLinker:
請注意,本組裝指南針對的是獨立的右手。
如果您需要制作一只獨立的左手,可以為舵機位置保留相同的 ID,然后在軟件中選擇是右手還是左手。
但是,如果您需要同時制作左右手并將其連接到機器人上,則必須為左右手的舵機分配不同的 ID。在同一條串行總線上,不同的舵機不能有相同的 ID……
運行 Demo
Demo 提供 Python 和 Arduino 兩個版本。 您需要外部電源來為手掌內的 8 個執行器供電。 如果您還沒有,一個簡單的外部電源可以是帶插孔連接器的 DC/DC 220V -> 5V / 2A 適配器。請查看物料清單:
https://docs.google.com/spreadsheets/d/1QH2ePseqXjAhkWdS9oBYAcHPrxaxkSRCgM_kOK0m52E/edit?gid=1269903342#gid=1269903342
Python 腳本:
https://github.com/pollen-robotics/AmazingHand/tree/main/ArduinoExample
Arduino 程序:
https://github.com/pollen-robotics/AmazingHand/tree/main/PythonExample
對于使用逆向/正向運動學的更高級用法,Demo目錄中有幾個示例,以及一些用于測試/配置電機的實用工具:
https://github.com/pollen-robotics/AmazingHand/blob/main/Demo
待辦事項列表-
開源
+關注
關注
3文章
3695瀏覽量
43860 -
機械手
+關注
關注
7文章
346瀏覽量
30420 -
3D打印
+關注
關注
27文章
3591瀏覽量
112643
發布評論請先 登錄
基于樹莓派的工業級 3D 打印機!


答疑|3D打印能打印立體字母嗎?
開源項目!教你如何制作一個開源教育機械臂
案例分析,搬運機械手如何選擇電機?


有源晶振在3D打印機應用方案

DMD芯片在3D打印中的創新應用
UV光固化技術在3D打印中的應用






 工商網監
工商網監
評論