") 【一文講解】車(chē)輛線控系統(tǒng)
【一文講解】車(chē)輛線控系統(tǒng)

車(chē)輛線控系統(tǒng)是一種以電子信號(hào)取代傳統(tǒng)機(jī)械、液壓或氣動(dòng)連接,來(lái)控制汽車(chē)關(guān)鍵功能(如轉(zhuǎn)向、制動(dòng)、油門(mén)、換擋、懸掛等)。
它消除了諸如換擋連桿、節(jié)氣門(mén)拉線、轉(zhuǎn)向傳動(dòng)機(jī)構(gòu)、制動(dòng)油路等物理中介,實(shí)現(xiàn)了對(duì)車(chē)輛關(guān)鍵執(zhí)行部件(如轉(zhuǎn)向、制動(dòng)、換擋、油門(mén))的電子化控制。這不僅是一場(chǎng)連接方式的革命,更深刻改變了車(chē)輛的操縱機(jī)構(gòu)與操縱邏輯,并強(qiáng)力推動(dòng)了執(zhí)行機(jī)構(gòu)的電氣化進(jìn)程。本質(zhì)上,線控技術(shù)標(biāo)志著汽車(chē)從以機(jī)械為主導(dǎo)的系統(tǒng)向以電子系統(tǒng)為核心的重大轉(zhuǎn)型。為確保絕對(duì)安全,該技術(shù)對(duì)通信網(wǎng)絡(luò)的實(shí)時(shí)性和可靠性要求極高,且關(guān)鍵系統(tǒng)(如轉(zhuǎn)向和制動(dòng))必須設(shè)計(jì)功能冗余,以保證在單點(diǎn)故障時(shí)仍能維持基本操作能力。
自動(dòng)駕駛技術(shù)的實(shí)現(xiàn)高度依賴(lài)于線控底盤(pán)。自動(dòng)駕駛系統(tǒng)通過(guò)傳感器感知環(huán)境并做出駕駛決策(如路徑規(guī)劃),這些決策最終都需轉(zhuǎn)化為電信號(hào)來(lái)精確控制車(chē)輛執(zhí)行機(jī)構(gòu)。因此,將傳統(tǒng)汽車(chē)底盤(pán)改造為適配自動(dòng)駕駛的線控底盤(pán)是必不可少的基礎(chǔ)。一個(gè)完整的自動(dòng)駕駛線控底盤(pán)主要包含五大核心系統(tǒng):線控轉(zhuǎn)向負(fù)責(zé)精確控制車(chē)輪方向;線控制動(dòng)實(shí)現(xiàn)快速、可調(diào)的制動(dòng)力分配;線控?fù)Q擋提供電子化的檔位選擇;線控油門(mén)(節(jié)氣門(mén)) 管理發(fā)動(dòng)機(jī)動(dòng)力輸出;線控懸掛則動(dòng)態(tài)調(diào)節(jié)車(chē)身姿態(tài)與舒適性。這五大系統(tǒng)的協(xié)同工作,為自動(dòng)駕駛提供了可靠、靈活的底層執(zhí)行平臺(tái)。
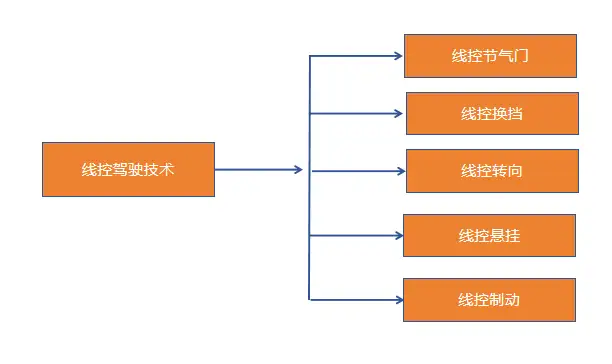
線控節(jié)氣門(mén)、線控?fù)Q擋、線控轉(zhuǎn)向和線控制動(dòng)都是面向自動(dòng)駕駛執(zhí)行端方向最核心的產(chǎn)品,其中又以制動(dòng)技術(shù)難度更高。
01線控節(jié)氣門(mén)線控節(jié)氣門(mén)技術(shù)通過(guò)電子線束替代傳統(tǒng)的機(jī)械拉索或拉桿,在節(jié)氣門(mén)位置集成微型電動(dòng)機(jī),由電信號(hào)精準(zhǔn)驅(qū)動(dòng)節(jié)氣門(mén)開(kāi)合角度。其核心構(gòu)成包括加速踏板模塊、高精度位移傳感器、電控單元(ECU)、CAN總線通信系統(tǒng)、伺服電動(dòng)機(jī)及節(jié)氣門(mén)執(zhí)行機(jī)構(gòu)。當(dāng)前,該技術(shù)已在傳統(tǒng)燃油車(chē)中普及為標(biāo)配,并全面覆蓋混合動(dòng)力與電動(dòng)汽車(chē)領(lǐng)域。由于電動(dòng)化動(dòng)力系統(tǒng)通常無(wú)需換擋(或采用線控?fù)Q擋),線控節(jié)氣門(mén)成為車(chē)輛動(dòng)力控制的關(guān)鍵電子化樞紐,標(biāo)志著動(dòng)力響應(yīng)機(jī)制從機(jī)械傳遞向數(shù)字電控的徹底轉(zhuǎn)型。
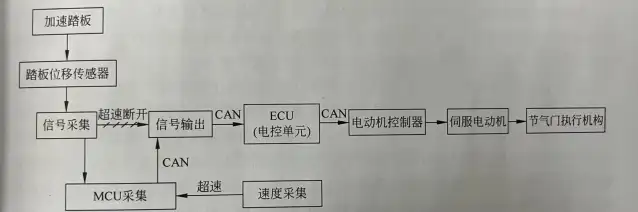
線控節(jié)氣門(mén)指通過(guò)用線束來(lái)代替拉索或者拉桿,在節(jié)氣門(mén)部位裝一只微型電動(dòng)機(jī),用電動(dòng)機(jī)驅(qū)動(dòng)節(jié)氣門(mén)開(kāi)度。線控節(jié)氣門(mén)主要由加速踏板、踏板位移傳感器、ECU(電控單元)、CAN 總線、伺服電動(dòng)機(jī)和節(jié)氣門(mén)執(zhí)行機(jī)構(gòu)組成,當(dāng)前線控節(jié)氣門(mén)或電子節(jié)氣門(mén)技術(shù)已經(jīng)成熟。針對(duì)傳統(tǒng)燃油車(chē),線控節(jié)氣門(mén)現(xiàn)在基本是標(biāo)準(zhǔn)配置,混合動(dòng)力和電動(dòng)汽車(chē)中都是線控節(jié)氣門(mén),基本不需要換擋,若有也會(huì)是線控。
線控節(jié)氣門(mén)系統(tǒng)經(jīng)過(guò)多年的發(fā)展,已經(jīng)不是最初的電動(dòng)機(jī)控制節(jié)氣門(mén)概念了,而逐漸發(fā)展成為根據(jù)加速踏板的位置,由ECU 決定節(jié)氣門(mén)的開(kāi)合大小以及噴油量、噴油時(shí)間間隔,其核心技術(shù)在于踏板位置信號(hào)的實(shí)時(shí)性和噴油量、噴油時(shí)間地精確控制。
02線控?fù)Q擋
線控?fù)Q擋技術(shù)通過(guò)電子化操作界面(如旋鈕、按鈕、撥桿或觸控面板)取代傳統(tǒng)機(jī)械式擋桿,將駕駛員的換擋指令轉(zhuǎn)化為電子信號(hào)傳遞至變速器控制系統(tǒng)。該技術(shù)雖未改變?nèi)加蛙?chē)自動(dòng)變速器的核心控制邏輯,但顯著優(yōu)化了人機(jī)交互體驗(yàn),釋放了車(chē)內(nèi)空間布局潛力。目前,線控?fù)Q擋已在傳統(tǒng)燃油車(chē)、混合動(dòng)力及純電動(dòng)車(chē)型中廣泛應(yīng)用,其技術(shù)成熟度高、實(shí)施難度低,成為車(chē)輛座艙電子化升級(jí)的標(biāo)志性配置之一。尤其在電動(dòng)化平臺(tái)上,由于動(dòng)力系統(tǒng)結(jié)構(gòu)簡(jiǎn)化(多數(shù)電動(dòng)車(chē)無(wú)需多級(jí)變速),線控?fù)Q擋更多承擔(dān)模式切換功能(如D/R/N擋位選擇),進(jìn)一步降低了機(jī)械復(fù)雜性。
盡管線控?fù)Q擋對(duì)自動(dòng)駕駛的核心控制鏈(如轉(zhuǎn)向/制動(dòng))影響有限,但其作為執(zhí)行端電子化的關(guān)鍵環(huán)節(jié),為自動(dòng)駕駛系統(tǒng)提供了無(wú)縫接管車(chē)輛的基礎(chǔ)條件。當(dāng)車(chē)輛處于自動(dòng)駕駛模式時(shí),系統(tǒng)可直接通過(guò)電信號(hào)切換行駛模式(如前進(jìn)/倒車(chē)/駐車(chē)),無(wú)需依賴(lài)機(jī)械聯(lián)動(dòng)裝置。未來(lái)隨著智能座艙與自動(dòng)駕駛技術(shù)的深度融合,線控?fù)Q擋將進(jìn)一步向集成化(如與方向盤(pán)撥片整合)、情境自適應(yīng)(根據(jù)駕駛模式自動(dòng)切換擋位邏輯)方向發(fā)展,最終成為智能汽車(chē)電子架構(gòu)中不可或缺的標(biāo)準(zhǔn)模塊。
03線控轉(zhuǎn)向
線控轉(zhuǎn)向系統(tǒng)通過(guò)完全取消方向盤(pán)與轉(zhuǎn)向輪之間的機(jī)械連接,以純電信號(hào)控制車(chē)輪轉(zhuǎn)向,徹底革新了傳統(tǒng)轉(zhuǎn)向架構(gòu)。 其核心由三大模塊構(gòu)成:方向盤(pán)總成(集成高精度傳感器與反饋電機(jī),實(shí)時(shí)采集駕駛意圖并模擬路感)、轉(zhuǎn)向執(zhí)行總成(當(dāng)前主流采用電控齒輪齒條機(jī)構(gòu),由伺服電機(jī)驅(qū)動(dòng)轉(zhuǎn)向拉桿)、系統(tǒng)控制器(動(dòng)態(tài)協(xié)調(diào)轉(zhuǎn)向角與反饋力,嵌入冗余安全算法)。這一技術(shù)突破實(shí)現(xiàn)了兩大自由設(shè)計(jì)維度——角傳遞特性(可編程調(diào)節(jié)轉(zhuǎn)向比,如低速靈活/高速沉穩(wěn))與力傳遞特性(定制化力反饋模擬),從而衍生出傳統(tǒng)機(jī)械轉(zhuǎn)向無(wú)法支持的功能:可變轉(zhuǎn)向比、主動(dòng)回正補(bǔ)償、碰撞時(shí)轉(zhuǎn)向柱零侵入安全防護(hù),以及與自動(dòng)駕駛系統(tǒng)的無(wú)縫協(xié)同控制。當(dāng)前技術(shù)挑戰(zhàn)聚焦于毫秒級(jí)實(shí)時(shí)響應(yīng)(延遲<100ms)、全工況力反饋擬真度優(yōu)化及ASIL-D級(jí)功能安全冗余(雙通信通道+備用電源),而未來(lái)將向輪邊獨(dú)立轉(zhuǎn)向執(zhí)行器發(fā)展,賦能四輪矢量控制。
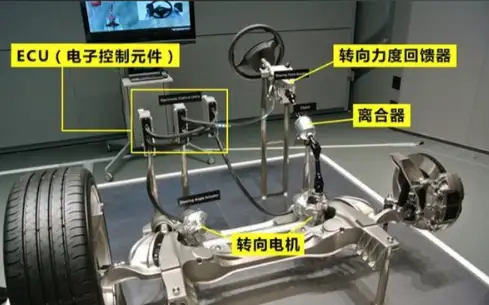
線控轉(zhuǎn)向系統(tǒng)通過(guò)電子閉環(huán)控制實(shí)現(xiàn)轉(zhuǎn)向功能:駕駛員操縱方向盤(pán)(或替代裝置如操縱桿/按鈕)時(shí),系統(tǒng)控制器實(shí)時(shí)采集方向盤(pán)轉(zhuǎn)角、車(chē)速及橫擺角速度等傳感器信號(hào),依據(jù)預(yù)設(shè)控制策略生成轉(zhuǎn)向指令;同時(shí),路感模擬系統(tǒng)根據(jù)車(chē)輛行駛狀態(tài)(如輪胎抓地力、路面顛簸)動(dòng)態(tài)生成反饋力矩,通過(guò)方向盤(pán)總成的執(zhí)行電機(jī)傳遞真實(shí)路感。 為平衡操控習(xí)慣與創(chuàng)新設(shè)計(jì),現(xiàn)階段多數(shù)系統(tǒng)仍保留傳統(tǒng)方向盤(pán)組件以降低適應(yīng)難度。其核心變革在于:
- 驅(qū)動(dòng)方式電子化:轉(zhuǎn)向力由電控執(zhí)行機(jī)構(gòu)(伺服電機(jī)或電液系統(tǒng))替代機(jī)械傳動(dòng),實(shí)現(xiàn)車(chē)輪轉(zhuǎn)向的精準(zhǔn)控制;
- 安全冗余架構(gòu):采用雙電機(jī)或電液復(fù)合系統(tǒng)等硬件冗余方案,當(dāng)主系統(tǒng)故障時(shí)備份系統(tǒng)即刻接管,確保轉(zhuǎn)向功能不中斷(如滿(mǎn)足ASIL-D功能安全等級(jí));
- 擴(kuò)展靈活性:在四輪獨(dú)立轉(zhuǎn)向電動(dòng)車(chē)上,可部署4個(gè)轉(zhuǎn)向電機(jī)直接控制各車(chē)輪轉(zhuǎn)向角,實(shí)現(xiàn)蟹行轉(zhuǎn)向、極小轉(zhuǎn)彎半徑等高級(jí)機(jī)動(dòng)功能。
04線控制動(dòng)
線控制動(dòng)是一種先進(jìn)的制動(dòng)技術(shù),其核心在于利用電子信號(hào)線纜替代傳統(tǒng)的液壓或氣壓制動(dòng)管路。該系統(tǒng)通過(guò)電子控制器(ECU)直接操控安裝在車(chē)輪上的電子制動(dòng)執(zhí)行器(作動(dòng)器),實(shí)現(xiàn)對(duì)制動(dòng)力的精確、動(dòng)態(tài)調(diào)控。
一個(gè)完整的線控制動(dòng)系統(tǒng)通常包含三個(gè)關(guān)鍵部分:
- 制動(dòng)踏板模塊: 由制動(dòng)踏板、踏板行程傳感器以及踏板力感模擬器構(gòu)成。行程傳感器實(shí)時(shí)監(jiān)測(cè)駕駛員的踩踏動(dòng)作和深度,將其轉(zhuǎn)化為表征制動(dòng)意圖的電信號(hào)。
- 制動(dòng)控制器(ECU): 作為系統(tǒng)大腦,它接收來(lái)自踏板行程傳感器的駕駛員意圖信號(hào),同時(shí)綜合處理來(lái)自車(chē)輛縱向/橫向加速度傳感器、橫擺角速度傳感器(以及可能的輪速傳感器等)的車(chē)輛動(dòng)態(tài)信息。
- 車(chē)輪制動(dòng)作動(dòng)器: 通常是電子控制的液壓?jiǎn)卧螂姍C(jī)驅(qū)動(dòng)裝置,直接作用于制動(dòng)卡鉗。它接收來(lái)自控制器的指令,快速、高精度地生成所需的制動(dòng)壓力。
工作流程簡(jiǎn)述: 駕駛員踩下踏板,行程傳感器檢測(cè)到動(dòng)作并將意圖信號(hào)發(fā)送給控制器。控制器基于駕駛意圖和實(shí)時(shí)車(chē)輛狀態(tài)(如加速度、穩(wěn)定性)進(jìn)行復(fù)雜計(jì)算,得出每個(gè)車(chē)輪所需的最優(yōu)制動(dòng)力,并指令對(duì)應(yīng)的作動(dòng)器執(zhí)行。與此同時(shí),控制器會(huì)向踏板模塊中的力感模擬器發(fā)送指令,使其產(chǎn)生與預(yù)期制動(dòng)力相匹配的踏板反作用力,為駕駛員提供直觀且符合預(yù)期的踏感反饋,模擬傳統(tǒng)制動(dòng)系統(tǒng)的腳感。
線控制動(dòng)技術(shù)依據(jù)實(shí)現(xiàn)方式可分為三大類(lèi):
1.電子駐車(chē)制動(dòng)系統(tǒng)(EPB,Electronic Parking Brake):這是線控制動(dòng)的基礎(chǔ)應(yīng)用形式,通過(guò)電子信號(hào)控制實(shí)現(xiàn)車(chē)輛的靜態(tài)駐車(chē)功能。
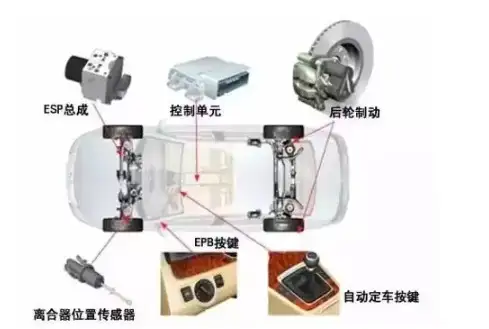
2.電液線控制動(dòng)系統(tǒng)(EHB,Electronic Hydraulic Brake):作為當(dāng)前量產(chǎn)車(chē)的主流方案,EHB 部分取代了傳統(tǒng)液壓管路。EHB 沒(méi)有了真空助力器,結(jié)構(gòu)更簡(jiǎn)單緊湊;電動(dòng)驅(qū)動(dòng),響應(yīng)也更加迅速;方便實(shí)現(xiàn)四輪制動(dòng)分別控制;容易集成ABS (Anti-lock Braking System), TCS (Traction Control System) 以及 ESC (Electric Stability Control)等輔助功能。其核心優(yōu)勢(shì)在于:精準(zhǔn)獨(dú)立控制: 能夠精確、獨(dú)立地調(diào)節(jié)各車(chē)輪輪缸壓力。快速響應(yīng): 系統(tǒng)反應(yīng)速度顯著優(yōu)于傳統(tǒng)液壓系統(tǒng)。集成化控制: 天然具備與再生制動(dòng)系統(tǒng)協(xié)同工作的能力,通過(guò)控制算法實(shí)現(xiàn)機(jī)電制動(dòng)力無(wú)縫協(xié)調(diào),最大化能量回收效率。安全協(xié)同: 可高效集成防抱死制動(dòng)系統(tǒng)(ABS)、電子穩(wěn)定性控制系統(tǒng)(ESP) 等主動(dòng)安全功能,大幅提升車(chē)輛制動(dòng)穩(wěn)定性與安全性。
工作過(guò)程為:
- 駕駛員踩下制動(dòng)踏板,輸入機(jī)械力;
- E-Booster通過(guò)電機(jī)和泵對(duì)駕駛員的輸入進(jìn)行助力(boost);
- 制動(dòng)主缸將駕駛員的輸入力和E-Booster的助力轉(zhuǎn)化成制動(dòng)系統(tǒng)液壓;
- 主缸液壓通過(guò)制動(dòng)硬管和軟管傳遞至每一個(gè)車(chē)輪的制動(dòng)卡鉗輪缸;
- 液壓推動(dòng)輪缸的活塞,產(chǎn)生壓力,將摩擦片壓緊到旋轉(zhuǎn)的制動(dòng)盤(pán)上;
- 摩擦片在垂直壓力的作用下,產(chǎn)生摩擦力和制動(dòng)力矩,對(duì)整車(chē)進(jìn)行制動(dòng)。

3.電子機(jī)械制動(dòng)系統(tǒng)(EMB,Electro-Mechanical Brake):代表線控制動(dòng)的終極形態(tài),完全摒棄了液壓管路,直接在車(chē)輪處通過(guò)電機(jī)驅(qū)動(dòng)產(chǎn)生制動(dòng)力。電子機(jī)械制動(dòng) EMB 系統(tǒng)結(jié)構(gòu)顯得更簡(jiǎn)潔了,取消了制動(dòng)系統(tǒng)的液壓備份部分,踏板信號(hào)與執(zhí)行器之間完全靠電子信號(hào)傳輸,與 ABS、TCS、ESC 等模塊配合實(shí)現(xiàn)車(chē)輛底盤(pán)的集成控制, 是真正的線控制動(dòng)系統(tǒng)。
其核心架構(gòu)與工作流程如下:
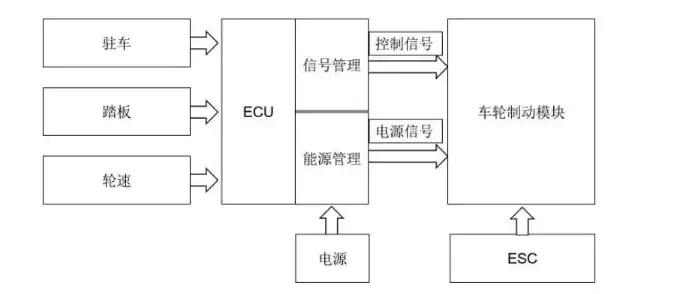
- 全電子信號(hào)傳輸,制動(dòng)踏板信號(hào)與車(chē)輛傳感器信號(hào)(輪速、加速度等)直接傳輸至中央控制器(ECU)。
- 分布式?jīng)Q策與控制,ECU綜合信號(hào)決策后,向四個(gè)獨(dú)立車(chē)輪制動(dòng)模塊發(fā)送指令。
電機(jī)驅(qū)動(dòng)單元:直接推動(dòng)摩擦材料塊壓緊制動(dòng)盤(pán)
獨(dú)立電機(jī)控制器:實(shí)現(xiàn)毫秒級(jí)響應(yīng)與精準(zhǔn)力矩控制 - 功能實(shí)現(xiàn)機(jī)制,制動(dòng)力分配(EBD)、防抱死(ABS)、牽引力控制(TCS)、穩(wěn)定性控制(ESC)等功能,通過(guò)協(xié)調(diào)四輪模塊的電機(jī)輸出實(shí)現(xiàn)。
來(lái)源:新能源汽車(chē)電控開(kāi)發(fā)與測(cè)試
-
線控
+關(guān)注
關(guān)注
0文章
18瀏覽量
6941 -
車(chē)輛
+關(guān)注
關(guān)注
0文章
85瀏覽量
15481 -
汽車(chē)
+關(guān)注
關(guān)注
15文章
3856瀏覽量
39533
發(fā)布評(píng)論請(qǐng)先 登錄
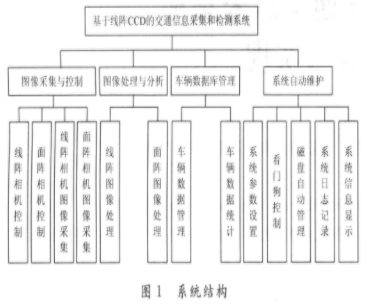
采用線陣CCD器件實(shí)現(xiàn)車(chē)輛采集和檢測(cè)系統(tǒng)的設(shè)計(jì)
車(chē)輛出入無(wú)線管理與調(diào)度系統(tǒng)的設(shè)計(jì)
車(chē)輛出入無(wú)線管理與調(diào)度系統(tǒng)的設(shè)計(jì)
車(chē)輛穩(wěn)定系統(tǒng)是什么?
一文講解單片機(jī)、ARM、MCU、嵌入式錯(cuò)綜復(fù)雜的關(guān)系
基于GPRS的交警車(chē)輛違章管理系統(tǒng)的設(shè)計(jì)
實(shí)時(shí)車(chē)輛檢測(cè)和跟蹤系統(tǒng)設(shè)計(jì)
車(chē)輛檢測(cè)線遠(yuǎn)程維護(hù)系統(tǒng)的研制

基于線陣CCD掃描的車(chē)輛圖像采集系統(tǒng)設(shè)計(jì)
一文讀懂車(chē)輛變道預(yù)警系統(tǒng)
一種基于線陣CCD掃描的車(chē)輛圖像系統(tǒng)的方案設(shè)計(jì)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論