") 毫米波雷達(dá)在自動(dòng)駕駛中有何關(guān)鍵作用?
毫米波雷達(dá)在自動(dòng)駕駛中有何關(guān)鍵作用?

[首發(fā)于智駕最前沿微信公眾號(hào)]隨著自動(dòng)駕駛技術(shù)的不斷成熟和推廣,越來越多傳感器被應(yīng)用到自動(dòng)駕駛車輛上。其中毫米波雷達(dá)(Millimeter-Wave Radar)以卓越的抗干擾能力、全天候測距性能和豐富的目標(biāo)運(yùn)動(dòng)信息,成為自動(dòng)駕駛感知系統(tǒng)中的核心組件之一。相較于激光雷達(dá)與攝像頭,毫米波雷達(dá)的關(guān)注度似乎并非那么高,但其作用卻無可替代。
毫米波雷達(dá)通過發(fā)射和接收頻率在30–300?GHz范圍內(nèi)的電磁波,對(duì)前方或周圍環(huán)境進(jìn)行連續(xù)掃描,借助電磁波的反射信號(hào)計(jì)算目標(biāo)的距離、速度和角度信息。典型的77?GHz車規(guī)雷達(dá)采用脈沖調(diào)制或連續(xù)波調(diào)頻(FMCW)技術(shù),利用發(fā)射信號(hào)與回波信號(hào)的頻率差(調(diào)頻斜率×?xí)r間延遲)精確測量距離,同時(shí)通過相位差或多天線布陣實(shí)現(xiàn)方位和俯仰角度分辨。在多輸入多輸出(MIMO)架構(gòu)中,虛擬天線陣列的構(gòu)建進(jìn)一步提升了角度分辨率,使得毫米波雷達(dá)具備檢測多目標(biāo)、區(qū)分高速行人與低速騎行者等復(fù)雜場景的能力。
在硬件層面,毫米波雷達(dá)的核心器件包括高線性度本振(LO)、功率放大器(PA)、低噪聲放大器(LNA)、混頻器和高速模數(shù)轉(zhuǎn)換器(ADC)。隨著半導(dǎo)體工藝的發(fā)展,SiGe BiCMOS以及90?nm以下CMOS制程已能夠滿足毫米波頻段的器件集成和低功耗需求。對(duì)于天線的使用,平面微帶陣列與波導(dǎo)稀疏陣列兩種主流方案各有優(yōu)勢,前者結(jié)構(gòu)扁平、易于封裝,適合批量化生產(chǎn);后者在大帶寬下能夠維持更高的增益和更寬的掃描視野。射頻前端與數(shù)字后端的協(xié)同設(shè)計(jì),以及射頻信號(hào)鏈的校準(zhǔn)和溫漂補(bǔ)償,則保證了雷達(dá)在高速、高溫、強(qiáng)振動(dòng)的車規(guī)環(huán)境下依舊保持穩(wěn)定性能。
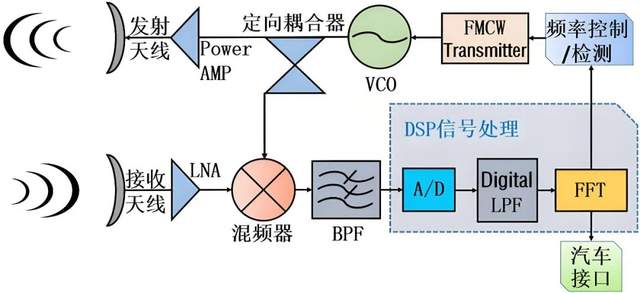
從信號(hào)處理角度來看,毫米波雷達(dá)輸出的是二維或三維的點(diǎn)云(range-Doppler map或angle-enhanced point cloud),需要經(jīng)過多級(jí)算法處理才能實(shí)現(xiàn)對(duì)動(dòng)態(tài)場景的精準(zhǔn)感知。其常見流程包括窗函數(shù)加權(quán)、快速傅里葉變換(FFT)、恒虛警(CFAR)檢測、聚類與分割、目標(biāo)跟蹤(Kalman濾波、多假設(shè)跟蹤MHT)等。近年來,深度學(xué)習(xí)技術(shù)開始被引入毫米波雷達(dá)點(diǎn)云分析,通過端到端神經(jīng)網(wǎng)絡(luò)模型,將保留原始頻域或時(shí)域特征,用以目標(biāo)分類和語義分割。與激光雷達(dá)相比,毫米波雷達(dá)在識(shí)別動(dòng)態(tài)目標(biāo)(特別是徑向運(yùn)動(dòng))方面具有天然優(yōu)勢,而結(jié)合多傳感器融合,可實(shí)現(xiàn)更魯棒的環(huán)境模型。
毫米波雷達(dá)對(duì)于自動(dòng)駕駛的實(shí)現(xiàn)起到了不可或缺的作用。毫米波電磁波不受霧霾、雨雪、強(qiáng)逆光的影響,能夠在復(fù)雜氣象條件下穩(wěn)定工作,為系統(tǒng)提供持續(xù)的安全冗余;在前向短距(30?m以內(nèi))和中遠(yuǎn)距(100–200?m)毫米波雷達(dá)都具備良好探測能力,可與攝像頭、超聲波傳感器和激光雷達(dá)形成全覆蓋探測矩陣;利用多普勒效應(yīng),毫米波雷達(dá)還可在微小頻偏下準(zhǔn)確估計(jì)目標(biāo)速度,精度可達(dá)厘米/秒級(jí),為自適應(yīng)巡航和碰撞預(yù)警提供可靠依據(jù);隨著大規(guī)模量產(chǎn),毫米波雷達(dá)的單價(jià)更是逐年下降,使其在中高端車型乃至大眾級(jí)自動(dòng)駕駛輔助系統(tǒng)(ADAS)中廣泛部署成為可能。
其實(shí)不難發(fā)現(xiàn),大家在討論自動(dòng)駕駛感知硬件時(shí),激光雷達(dá)及攝像頭一定是主角,但毫米波雷達(dá)卻鮮有提及,這主要是因?yàn)楹撩撞ɡ走_(dá)存在一定的局限性。首先,毫米波雷達(dá)角度分辨率相對(duì)激光雷達(dá)較低,難以實(shí)現(xiàn)高精度的三維成像;其次,毫米波雷達(dá)對(duì)于靜態(tài)小目標(biāo)(如路緣石、低矮護(hù)欄)回波微弱,易被噪聲淹沒;再次,毫米波雷達(dá)的多徑反射和雜波抑制仍是難點(diǎn),需要更復(fù)雜的信號(hào)處理;最后,毫米波頻段在不同國家和地區(qū)的監(jiān)管頻譜存在差異,對(duì)設(shè)計(jì)和量產(chǎn)提出了合規(guī)要求。
未來,毫米波雷達(dá)或?qū)⒀刂韵路较蜓葸M(jìn)。一是更高頻段的探索,如150?GHz及以上E波段雷達(dá),將帶來更細(xì)膩的角度和距離分辨能力;二是全數(shù)字波束形成(DBF)與軟件定義雷達(dá)(SDR)架構(gòu),將極大提升靈活性,支持動(dòng)態(tài)波形調(diào)制與智能干擾抑制;三是與AI深度融合,通過自監(jiān)督和遷移學(xué)習(xí),在未知場景中實(shí)現(xiàn)對(duì)回波特征的自適應(yīng)提取;四是傳感器融合層面的創(chuàng)新,將毫米波雷達(dá)與成像雷達(dá)、激光雷達(dá)、可見光/紅外攝像頭的原始信號(hào)級(jí)協(xié)同處理,把多源信息統(tǒng)一到智能中樞,提高感知精度與魯棒性;五是車內(nèi)外協(xié)同,本地毫米波雷達(dá)可與V2X網(wǎng)絡(luò)、高清地圖和云端AI平臺(tái)分享實(shí)時(shí)感知數(shù)據(jù),構(gòu)建更大范圍的駕駛環(huán)境認(rèn)知。
毫米波雷達(dá)以其全天候、抗干擾、速度測量精準(zhǔn)等特點(diǎn),成為自動(dòng)駕駛感知系統(tǒng)中不可或缺的關(guān)鍵傳感器。伴隨半導(dǎo)體工藝、天線陣列設(shè)計(jì)、數(shù)字信號(hào)處理與人工智能技術(shù)的發(fā)展,毫米波雷達(dá)的探測精度、抗多徑能力和智能化水平都將得到顯著提升。未來,毫米波雷達(dá)不僅會(huì)在單車感知中繼續(xù)發(fā)揮核心作用,更將在多車協(xié)同、智慧交通系統(tǒng)中拓展新的應(yīng)用場景,為實(shí)現(xiàn)更高等級(jí)的自動(dòng)駕駛和智能交通提供堅(jiān)實(shí)的技術(shù)支撐。自動(dòng)駕駛時(shí)代已經(jīng)開啟,毫米波雷達(dá)的不斷進(jìn)步,將在不遠(yuǎn)的將來見證真正的無人駕駛落地。
-
自動(dòng)駕駛
+關(guān)注
關(guān)注
788文章
14265瀏覽量
170163 -
毫米波雷達(dá)
+關(guān)注
關(guān)注
107文章
1094瀏覽量
65256
發(fā)布評(píng)論請(qǐng)先 登錄
自動(dòng)駕駛毫米波雷達(dá)之間會(huì)相互干擾嗎?

ADAS和防撞系統(tǒng)中的毫米波雷達(dá)方案

一文速覽:共達(dá)毫米波雷達(dá)全解析

自動(dòng)駕駛測試在設(shè)計(jì)環(huán)節(jié)中有何關(guān)鍵作用?
毫米波雷達(dá)在智能交通系統(tǒng)中的作用
毫米波雷達(dá)的基頻和調(diào)制技術(shù) 毫米波雷達(dá)在機(jī)器人導(dǎo)航中的應(yīng)用
毫米波雷達(dá)與超聲波雷達(dá)的區(qū)別
毫米波雷達(dá)與激光雷達(dá)比較 毫米波雷達(dá)在自動(dòng)駕駛中的作用
毫米波雷達(dá)工作原理 毫米波雷達(dá)應(yīng)用領(lǐng)域
康謀技術(shù) | 高效環(huán)境感知:毫米波雷達(dá)數(shù)據(jù)采集、可視化及存儲(chǔ)方案

康謀技術(shù) | 毫米波雷達(dá)技術(shù)解析

什么是毫米波雷達(dá)?毫米波雷達(dá)模組選型






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論