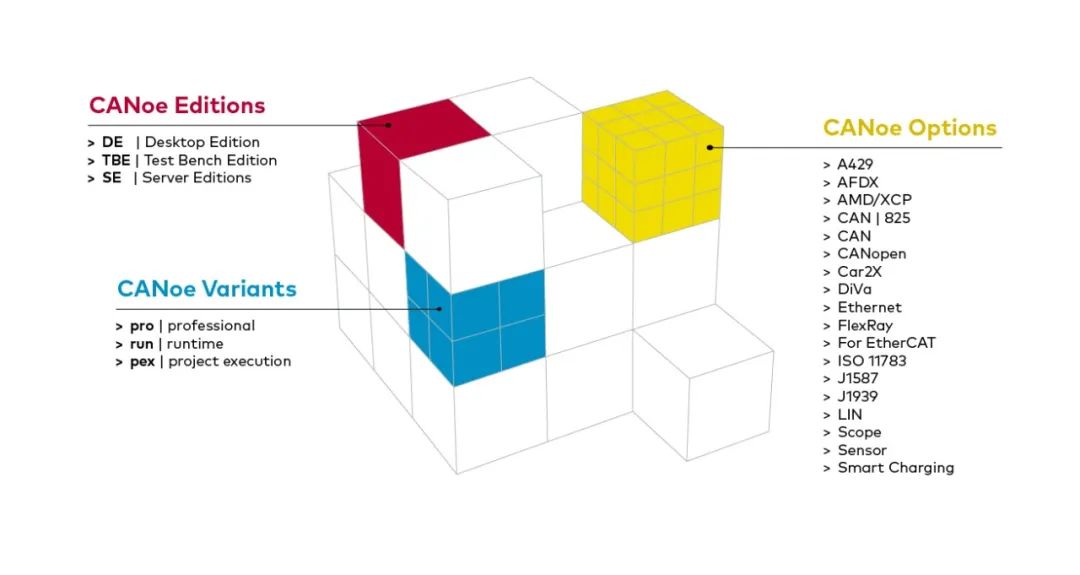
 CANoe產品體系19版本新功能(上)
CANoe產品體系19版本新功能(上)
新版本持續助力當前車輛E/E架構中ECU開發驗證,同時賦能后續智能網聯電動車型預研驗證。新版本CANoe產品體系新增數據驅動的DDS、車輛互聯服務和高效電機模型庫,進一步支持CAN XL、10BASE-T1S和CAN FD Light賦能當下預研工作,全面綜合增強全球充電系統的仿真和驗證有效支撐新能源車出海,全新的V2X設備滿足車聯網測試驗證,滿足SOA架構下透傳協議DLT、CMP和IEEE1722。更多編程與IDE實時代碼補全、HIL/SIL、CI/CT與DevOps相關新功能詳見:CANoe產品體系19新功能(下) - 基礎功能與XIL測試。
01CANoe新增DDS插件
基于vCDL配置數據類型、Topic和QoS,支持IDL轉換為vCDL功能,支持使用VS Code插件開發DDS通信所需的數據庫;
通信支持數據發布與訂閱DDS Topic,支持放在Participant和Domain,支持OMG DDS標準定義的所有QoS設置;
支持所有復雜數據類型,包括結構體、聯合、和嵌套數組等;
DDS監控分析擴展可用的Topic、Reader和Writer匹配關系、序列化失敗等;
支持RPC擴展和Security,可直接集成ROS2環境,兼容RTI Connext、FastDDS、Cyclone DDS等;
無需轉換可直接使用汽車以太網1000/100BASE-T1硬件,支持底層以太網報文在Trace和Protocol Monitor中可視化。

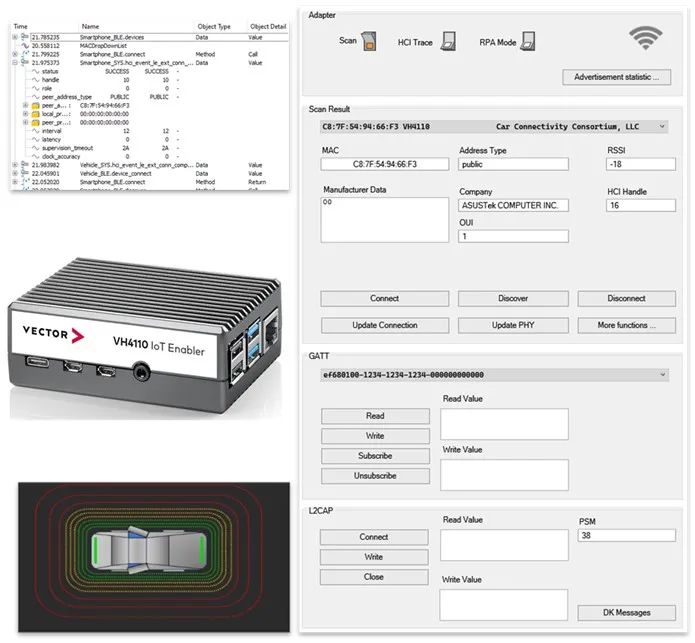
02CANoe新增Connectivity插件
無需專業協議細節即可通過vCDL定義應用數據,通過CAPL、Python和C#實現互聯服務配置;
支持MQTT(支持客戶端和Broker模式,包括MQTT故障測試)、HTTP(客戶端和服務器模式)、Modbus/TCP(支持客戶端、服務器和網關模式)、gRPC(支持客戶端模式和Unary請求通信);
VN系列Ethernet總線硬件接口卡可用于MQTT、HTTP和Modbus系統通信;
MQTT、HTTP和gRPC序列化支持JSON、Protocol Buffer或純文本;
搭配IoT設備支持WiFi(支持接入點和站點模式)、藍牙/低功耗藍牙(支持中心和外設模式、配對、HCI跟蹤和注入)、NFC(支持ISO 7816 APDU規范的讀卡器和卡/標簽模式)和UWB(支持通用控制接口UCI中的啟動者和響應者模式)。
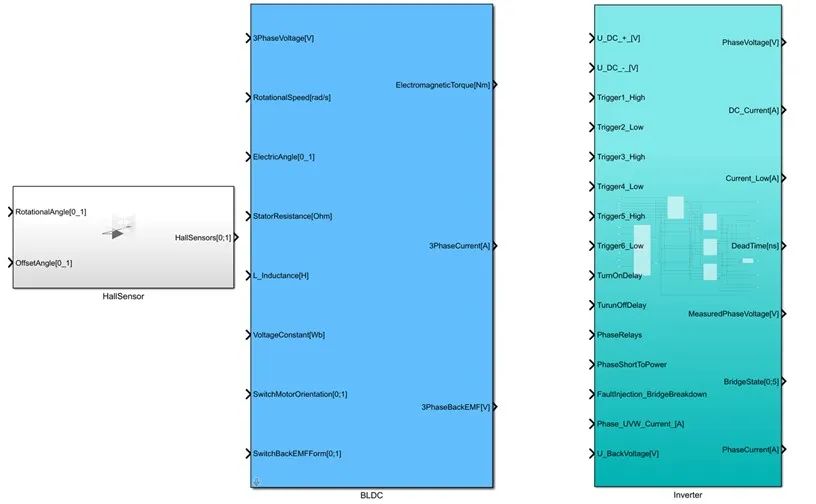
03CANoe新增電機模型插件
Model Option Electric Motor提供“Ready-to-Use”的永磁同步電機(PMSM)和無刷直流電機(BLDC)模型,模型僅需通過CANoe FPGA Manager即可直接刷寫到電機板卡VT5838上,直接滿足電機HIL;
可通過電機模板提供的參數,直接通過系統變量修改電機參數,而無需額外工具。
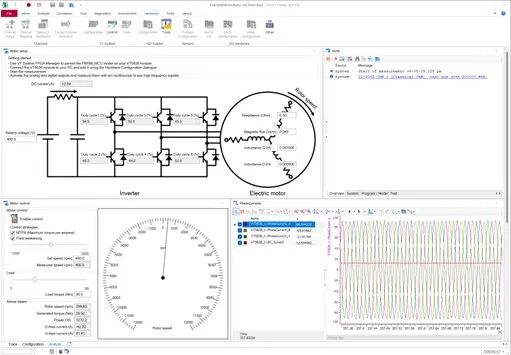
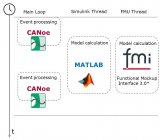
同時提供高度開放的Simulink模型庫,耦合MATLAB/Simulink和FPGA工具鏈,實現項目所需,更好滿足電驅、TCU和線控轉向等HIL測試。
04以太網新增功能與升級
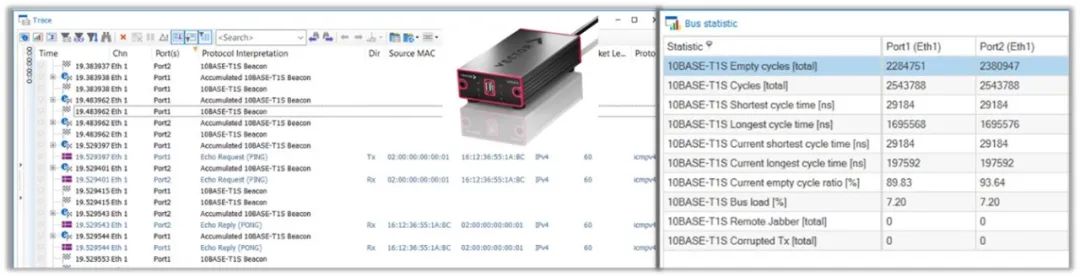
全新的10BASE-T1S總線統計功能,支持總線負載率、空閑Cycle和最大/最小周期等統計信息,Trace窗口新增Beacon可視化選項,面向10BASE-T1S通信提供2通道緊湊型通信接口卡VN5614;
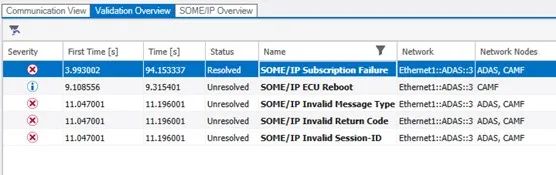
擴展SOME/IP功能:新增用于等待SOME/IP服務發現和報文的CAPL測試函數,新增用于處理SOME/IP和SOME/IP SD的CAPL回調,支持最大4MB的SOME/IP報文分析,SOME/IP交互層API支持為同一服務實例模擬多個消費服務實例;
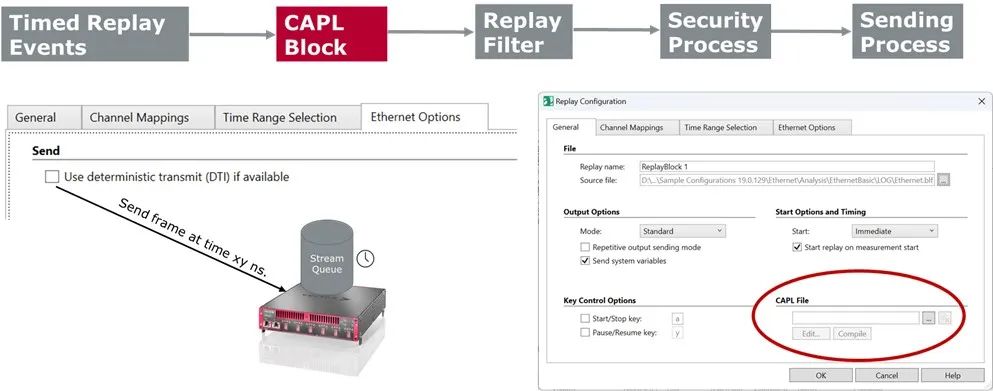
完善并優化Ethernet在線回放功能,用于回放期間操作回放報文中的數據,如創建過濾或數據更新頻率等,可以與確定性傳輸接口結合使用來滿足激光雷達回放;
協議監控器Protocol Monitor更快速分析Ethernet:與其它分析窗口可同步時間戳分析,支持更多分類過濾分析功能,SOME/IP動態運行過程中的深層次失效原因說明;
區域控制器下AVB/TSN增強:AVB IL函數和控制格式支持發送方和接收方的AVTP,并支持CAN、LIN和FlexRay報文封裝,改進AVB API錯誤處理機制以更好提示錯誤、無效音頻通道檢測以及更詳細的回調說明;
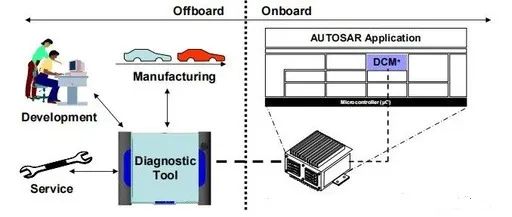
DoIP優化內容:診斷配置缺失或配置錯誤適配器時的優化,支持診斷使用下級ECU地址進行非請求的診斷響應配置,支持ISO 13400-2:2019/Amd1中Payload類型0x8004和0x9001的內置診斷通道以及API接口。
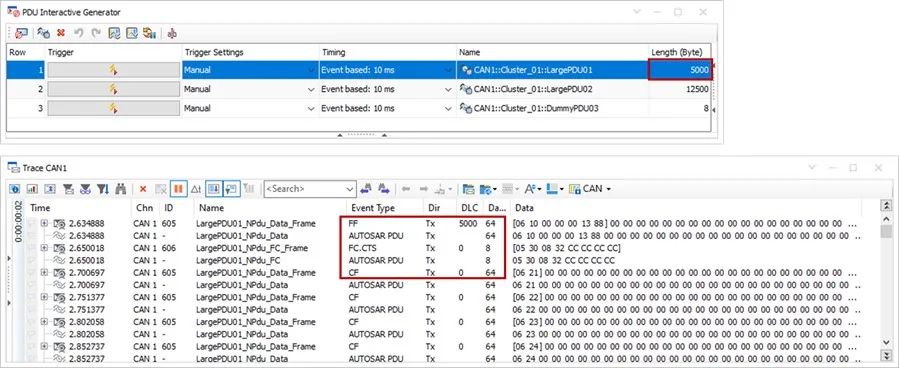
05更全面支持CAN技術 - CAN FD Light和CAN XL
CAN XL數據記錄支持*.blf格式;
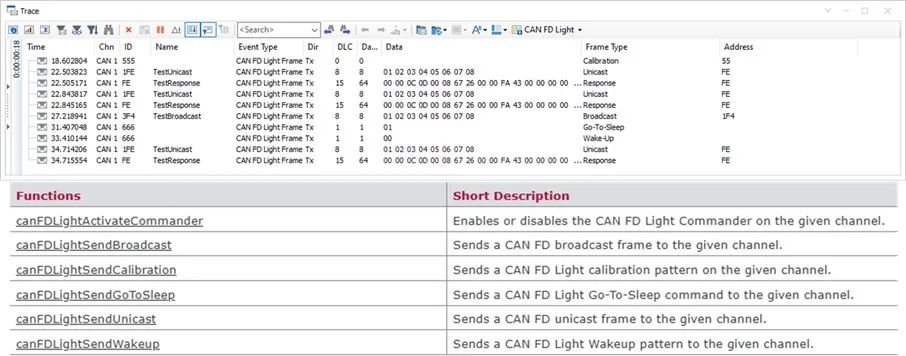
支持最新版本ISO11898規范定義的輕量級CAN FD Light協議,滿足傳感器和執行器通過請求與響應的方式進行CAN FD Light通信系統的仿真與分析,并提供相關CAPL API;
NET 8編程支持CAN報文和訪問AUTOSAR 4.2數據庫中的原始報文。
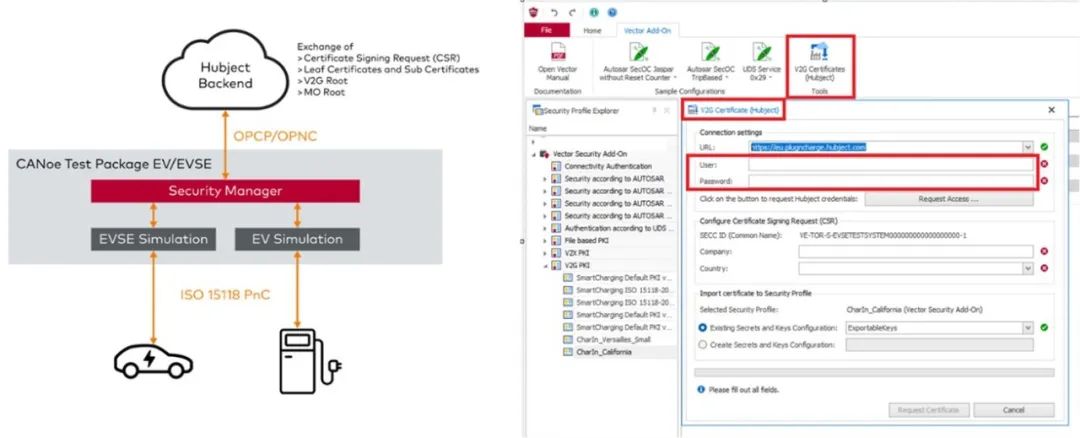
06智能CCS/NACS協議分析器,更多充電功能支持“加電”與“出海”
充電插件新增支持OppCharge、SAE J3105、VDA261 Ed1和GB/T 27930-2023(A類系統)等協議;
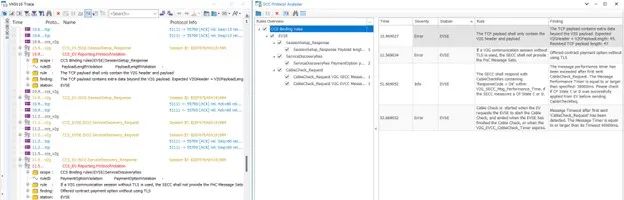
Security Manager接通Hubject證書平臺到CANoe中,更好滿足ISO 15118中PnC互操作性和安全測試;
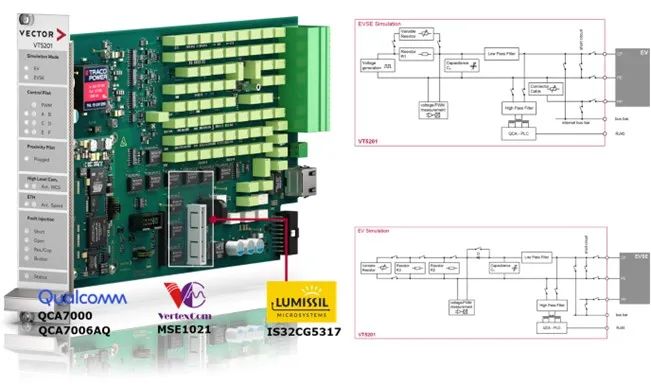
支持歐美標充電測試新板卡VT5201發布,提供可選的不同Green PHY PLC芯片以滿足互操作測試,搭配全新的充電協議一致性測試Package確保充電系統質量。
07Sensor、AMD/XCP、CANopen、EtherCAT和Car2X功能新增與改善
SENT搭配VT2710支持配置13個Nibble;
運行版本CANoe支持XCP設備的創建與刪除,并支持改變配置參數表,YAML導出時支持結構體參數,改善XCP on TCP連接,CANoe的AUTOSAR DLT插件擴展支持Verbose Mode;
CANopen在數據庫生成時通信參數對象用作PDO,以便Trace分析窗口顯示具體描述信息,網絡管理服務LSS支持模擬未配置節點ID;
EtherCAT支持在所有NDIS驅動的網卡上運行Master設備和Slave設備;
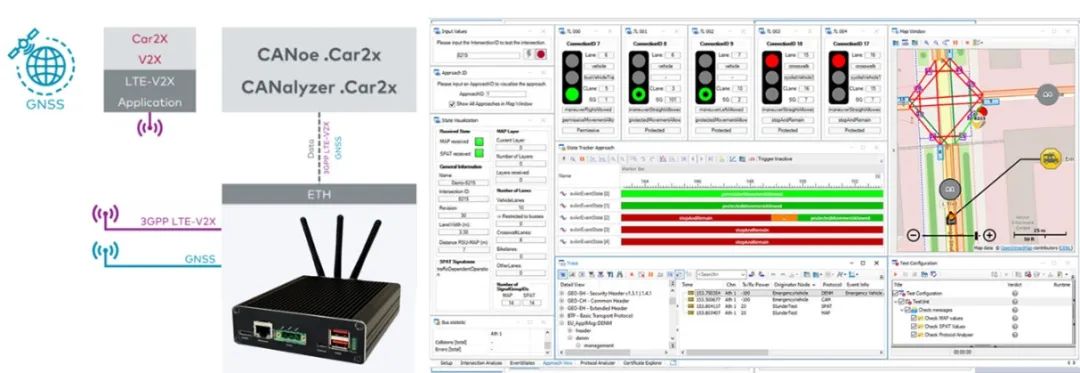
提供滿足3GPP LTE-V2X PC5直連硬件用于V2X開發測試和場地測試,Car2X協議分析儀增加額外檢測項。Security Manager增強與V2X PKI服務器后臺通信的注冊證書,ECT L0、L1和L2可用于簽名和SSP位校驗。場景測試增強獨立運行多個場景功能,V2X事件和屬性可根據距離或時間定義。攜手生態伙伴提供歐盟V2X合規性測試,在確保詳細驗證時通過Car2X Protocol Analyzer提供驗證失敗的根本原因分析。
08J1939和ISO 11783更好支持商用車和農業機械
J1939全新的通信統計窗口,增強功能安全E2E自動計算。全新的GNSS交互層,支持便捷的CAPL接口輕松實現軌跡描繪(如直線、圓弧和曲線等),生成軌跡在物理上是正確的并顯示方向、速度和偏航率的連續變化,通過Map窗口可使用鼠標交互定義新軌跡且支持可視化,并可計算因未安裝在車輛中心點導致偏移的GNSS接收到的軌跡信息。全新的ISO 11783模板支持拖拉機裝備管理TIM的便捷分析,新增任務控制TC窗口便捷的過濾與分析功能,支持TIM中掛鉤和頂桿連接的所有功能。
-
仿真
+關注
關注
51文章
4234瀏覽量
135284 -
ecu
+關注
關注
14文章
914瀏覽量
55430 -
CANoe
+關注
關注
4文章
71瀏覽量
9056 -
Vector
+關注
關注
3文章
68瀏覽量
9039
原文標題:CANoe產品體系19版本新特性及新增Option(上)
文章出處:【微信號:VectorChina,微信公眾號:Vector維克多】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
CANoe產品體系19版本新功能(下)
AD19的主要新功能
微軟發布Edge Dev通道83.0.478.5版本更新 新增5項新功能
IIFAA汽車數字鑰匙2.0版本的新功能
SOLIDWORKS 2023新功能揭秘!SOLIDWORKS Simulation 2023版本
CANoe軟件的介紹
MX Linux 23版本新功能介紹

CANoe14.0新版本實用小功能

新功能發布 | TSMaster新增CANoe自動化控制模塊,歡迎下載體驗!

Python與CANoe/CANoe4SW

淺談Xpedition 2409版本的新功能
信捷電氣XDPPro V3.8.0版本的五大創新功能





 工商網監
工商網監
評論