 基于近紅外光的機器人非接觸式傳感系統
基于近紅外光的機器人非接觸式傳感系統
隨著物聯網和5G技術的快速發展,使人與機器之間能夠進行信息交換的傳感器正逐漸從柔性觸覺傳感器擴展到非接觸式傳感器。目前,觸覺傳感器主要基于電阻、電容、壓電、摩擦電和磁性。觸覺傳感器可以檢測接觸物體的接觸力、溫度、濕度、振動、材料、柔軟度等特性,有利于人/機器人與環境的互動。然而,觸覺傳感器在與待檢測物體接觸時在近視中有一個盲點,并且受到環境光的限制。此外,觸覺傳感器不可避免地會受到機械疲勞和穩定性差的影響,限制了它們的實用性和通用性。由于非接觸式傳感器可以以更簡單直接的方式實現復雜的人機交互,因此它們被廣泛應用于安全導航、遙感、智能醫療、電子屏幕和智能機器人。
非接觸式傳感器的一個挑戰是傳感性能和穩定性之間的矛盾。據報道,實現非接觸式傳感的方法主要包括磁性、濕度、紅外輻射、摩擦電、電容和視覺傳感器。其中,濕度和電容傳感器只能檢測到有限數量的簡單類型,如接近和滑動。磁傳感器需要磁性附件,導致交互體驗低,而視覺傳感器不能在黑暗環境中使用。目前用于非接觸式手勢識別的摩擦電傳感器仍然存在表面電荷存儲能力弱的問題。此外,非接觸式傳感器面臨著一個關鍵挑戰,即它們的輸出性能隨著工作距離的增加而降低,限制了它們在非接觸式傳感領域的進一步應用。傳統非接觸式傳感器的工作距離非常有限。因此,許多非接觸式傳感器在長距離下無法實現高精度和高穩定性。近紅外(NIR)光因其易于獲取和高能量特性,也可用于非接觸式控制領域。大多數報道的作品使用紅外輻射或可見光譜來實現非接觸式傳感,但它們容易受到環境光和溫度等外部環境的影響。因此,開發精度高、穩定性好、適應多種環境的非接觸式傳感器具有重要意義。
水凝膠因其獨特的3D結構和優異的力學性能而廣泛應用于柔性可穿戴領域。然而,由于水作為溶劑體系的影響,水凝膠在低溫或高溫環境下容易損壞其機械性能和完整性,這限制了它們的應用范圍,特別是在柔性電子領域。因此,研究人員為開發具有良好機械性能和環境穩定性的凝膠做出了不懈的努力。與水凝膠相比,有機凝膠(有機水凝膠)近年來受到了廣泛關注,其主要優點之一是對液相具有更寬的選擇性,從而顯示出更多的應用領域。盡管有機凝膠的導電性較差在實際應用中可能需要進一步處理,但它們在非接觸式傳感器領域顯示出良好的機械耐久性和環境穩定性。例如,有機凝膠的熱穩定性可以通過所選溶劑的沸點來調節。目前,有機凝膠的分類主要包括含有極性液體的有機凝膠(或油凝膠)、具有在有機溶劑中膨脹的聚合物網絡的軟材料,以及用于區分有機凝膠和水凝膠的有機填充液體。對于二元溶劑體系,有機凝膠和水凝膠之間存在明顯的重疊。在這種情況下,凝膠的定義可以根據主要溶劑或功能最強的溶劑的性質來確定。因此,在這項工作中,將PAM瓊脂TABP有機水凝膠中的水揮發后的樣品命名為PAM瓊脂TAPP有機凝膠。
本文亮點
1. 本工作開發了一種智能紅外光熱非接觸式傳感系統,提供長距離、高精度的非接觸式感應。
2. 設計了一種基于黑磷(BP)的復合有機凝膠作為活性材料,該凝膠具有優異的光熱性能和環境穩定性。這種材料可以通過紅外熱成像儀監測的各種圖案化掩模檢測近紅外(NIR)光產生的圖案。所構建的非接觸式傳感系統能夠準確識別26個字母,準確率高達99.4%。
3. 即使是小尺寸的非接觸式傳感器也可以在寬溫度范圍內、長工作距離、不同電流強度和黑暗條件下保持高靈敏度和穩定性,表現出卓越的魯棒性。
4. 結合機器學習方法,證明了非接觸式傳感系統在模式識別和人機交互方面的優勢。
圖文解析
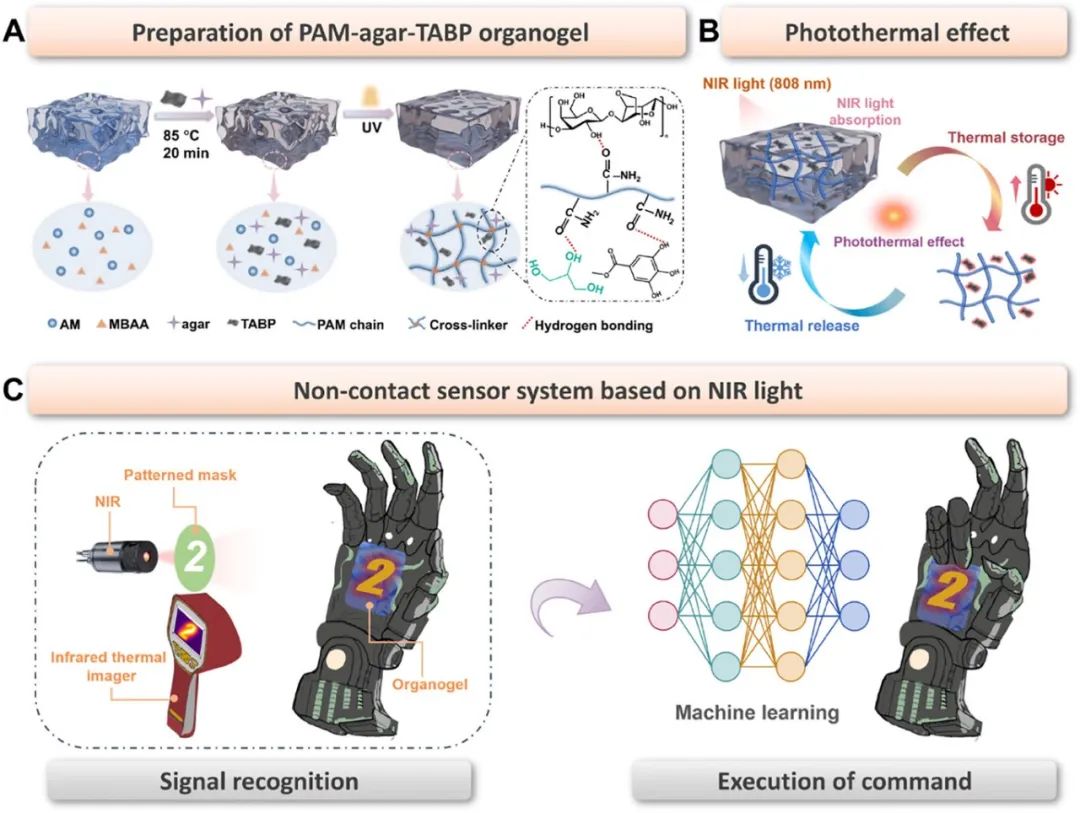
圖1. 非接觸式傳感器系統的設計和結構。A)PAM瓊脂TABP有機水凝膠的制備工藝和B)光熱效應說明。C)基于近紅外輻射和機器學習的非接觸式傳感器系統。在近紅外光的激發下,紅外熱像儀監測不同掩模照射在凝膠材料上的圖像。
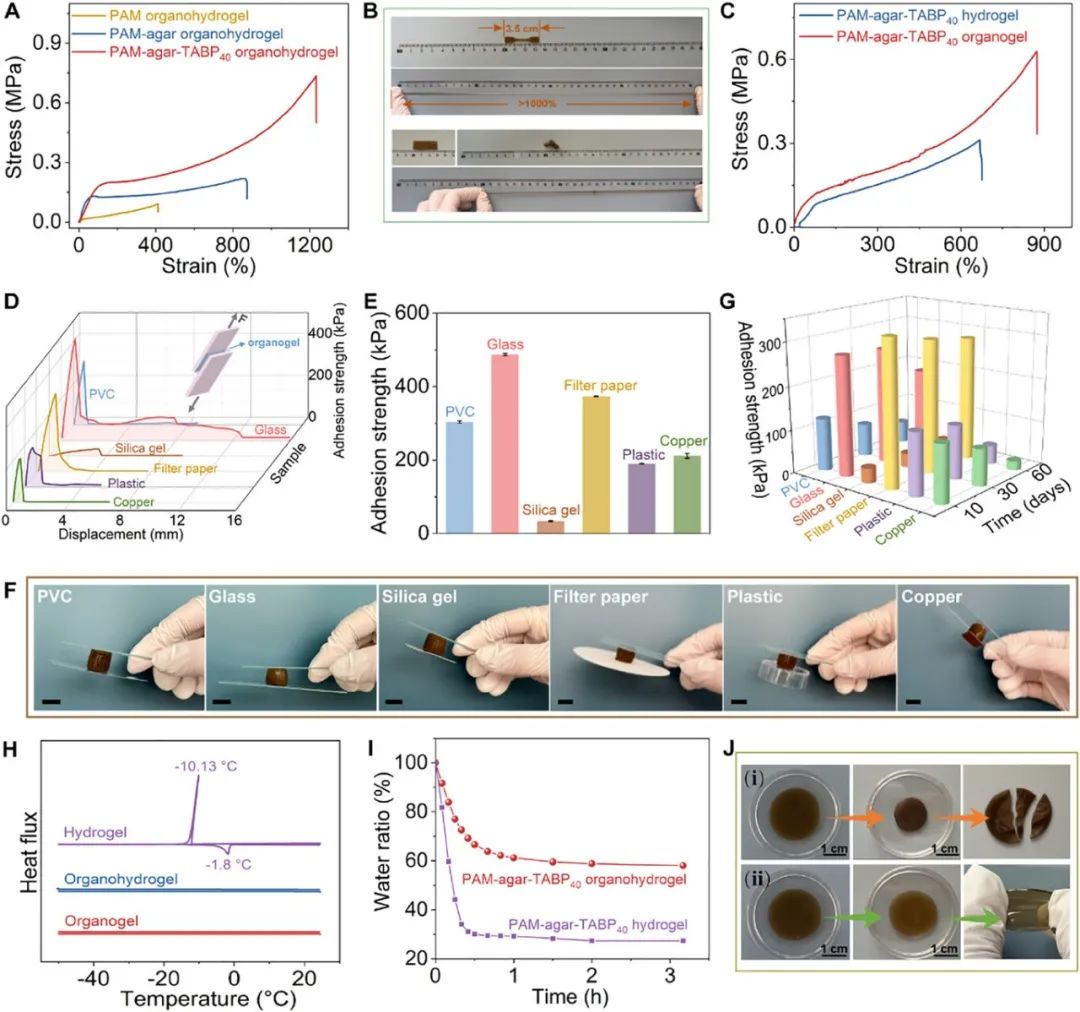
圖2. PAM-agar-TABP40凝膠的機械性能和粘附性能。A)不同PAM基有機水凝膠的拉伸應力-應變曲線。B)PAM-agar-TABP40有機水凝膠機械性能的光學照片。C)PAM-agar-TABP40水凝膠和有機凝膠的拉伸應力-應變曲線。D)粘附力學曲線和E)厚度為0.5 mm的PAM-agar-TABP40有機凝膠的相應粘附強度(插圖是搭接剪切試驗的說明)。F)PAM-agar-TABP40有機凝膠對各種基材的粘附行為(比例尺=2 cm)。G)不同時間后厚度為0.5mm的PAM-agar-TABP40有機凝膠的粘附穩定性。H)基于PAM-agar-TABP40的凝膠的DSC曲線。I)PAM-agar-TABP40凝膠在60°C下的重量變化。J)PAM-agar-TABP40水凝膠(i)和有機水凝膠(ii)在60°C下24小時后的照片。
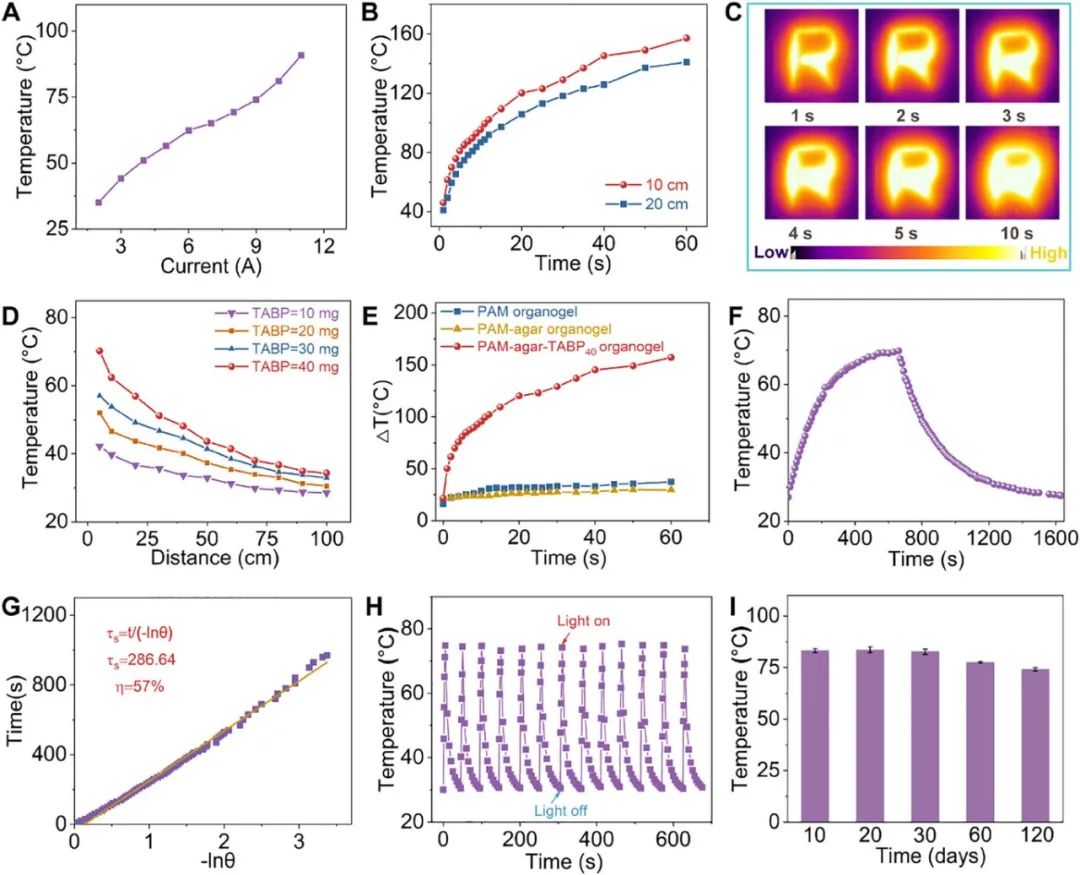
圖3. PAM-agar-TABP40有機凝膠的光熱行為。A)PAM-agar-TABP40有機凝膠在不同近紅外強度(距離=10 cm,t=5 s)下的溫度變化。B)PAM-agar-TABP40有機凝膠在有機凝膠和近紅外光之間不同距離下的溫度變化(I=10 A,t=5 s),C)以及t=1-10 s時的相應紅外圖像。E)不同PAM基有機凝膠(I=10 A,距離=10 cm)的溫度變化。F)PAM-agar-TABP40有機凝膠在近紅外輻射下的光熱轉換效應。G)利用線性時間數據計算冷卻過程的時間常數(τs)。H)PAM-agar-TABP40有機凝膠的光熱循環,用于多次開/關循環(I=10 A,距離=10 cm)。I)PAM-agar-TABP40有機凝膠在四個月后的光熱穩定性。
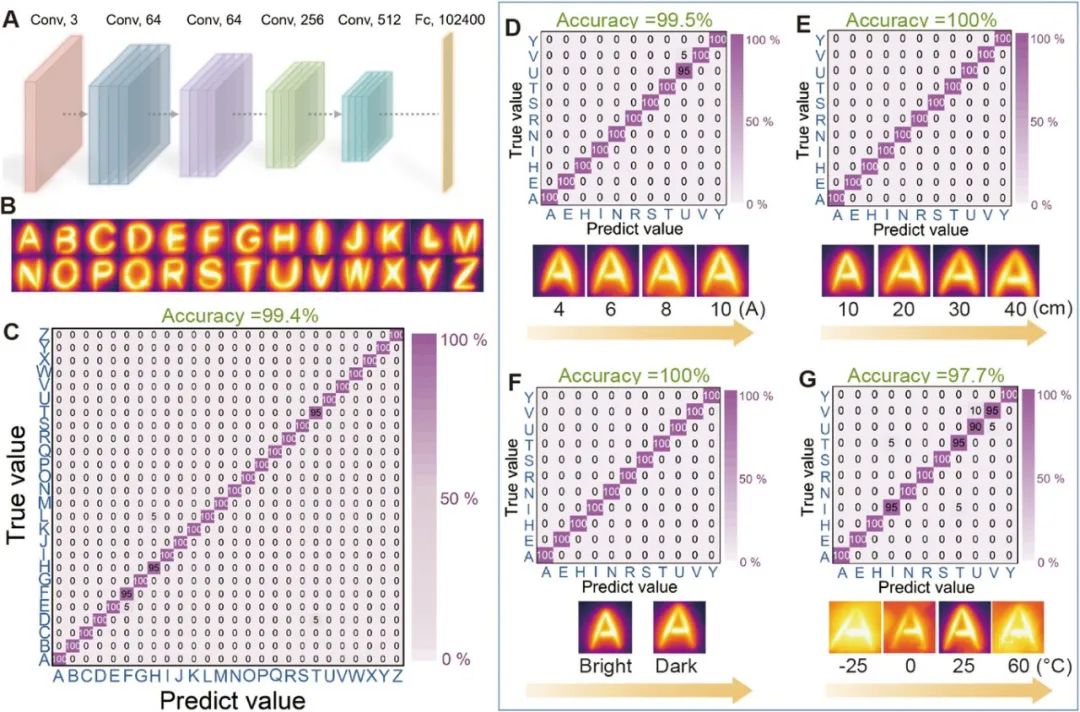
圖4. 基于機器學習和近紅外光的高精度模式識別數據處理。A)培訓過程的說明。B)在近紅外激光下,通過不同掩模在PAM-agar-TABP40有機凝膠上照射26個字母的光學照片。C)26個字母的混淆圖,顯示識別準確率為99.4%。“燕山大學”中11個字母的混淆圖,D)不同的電流(識別準確率為99.5%),E)不同的距離(識別準確度為100%),F)不同的環境亮度(識別正確率為100%)。插圖顯示了相應“A”在不同條件下的光學照片。
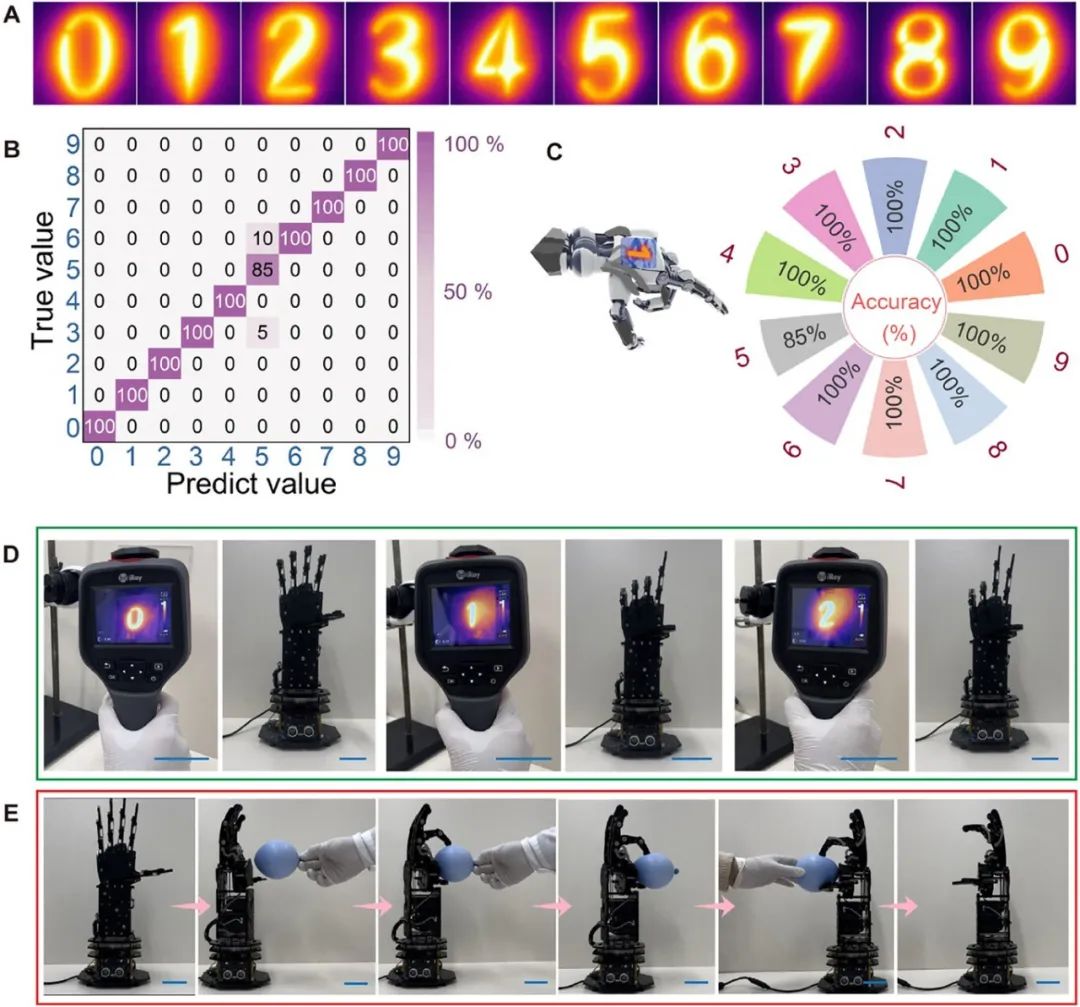
圖5. 非接觸式傳感器的應用。A)在近紅外激光下,通過不同掩模在PAM-agar-TABP40有機凝膠上照射10個數字的光學照片。B)26個字母的混淆圖,顯示識別準確率為98.5%。C)非接觸式傳感系統的數字識別精度總結。D)結合機器學習,基于近紅外光的非接觸式傳感系統成功識別數字并做出相應的手勢。E)非接觸式傳感系統可以抓取和轉移物體
審核編輯 黃宇
-
機器人
+關注
關注
213文章
29463瀏覽量
211462 -
非接觸式
+關注
關注
0文章
82瀏覽量
14445 -
紅外光
+關注
關注
0文章
60瀏覽量
13222 -
傳感系統
+關注
關注
1文章
94瀏覽量
17074
發布評論請先 登錄
透明近紅外傳感器推動非接觸式交互應用
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
【「具身智能機器人系統」閱讀體驗】1.初步理解具身智能
《具身智能機器人系統》第1-6章閱讀心得之具身智能機器人系統背景知識與基礎模塊
近紅外光譜儀的原理和工作機制
近紅外光譜儀校準方法 近紅外光譜儀與紫外光譜儀區別
Aigtek功率放大器在高功率近紅外光梳系統中的應用
物聯網系統中常見的非接觸人體感應方案_紅外傳感器詳解

近紅外光譜的新曙光





 工商網監
工商網監
評論