 智元機器人開源資料 智元靈犀X1開發指南
智元機器人開源資料 智元靈犀X1開發指南
給大家帶來一些智元機器人開源資料 ;這里主要分享給大家 智元靈犀X1開發指南。
智元機器人將其自主研發的全棧開源機器人智元靈犀X1面向全球開發者正式開源,在提供核心組件的基礎上,智元機器人完整地開源了軟硬件全套圖紙和代碼,總資料大小超過1.2GB。在整機結構硬件方面,提供了整機結構圖紙、整機硬件框圖、整機BOM,細致到每一個螺絲和齒輪,確保開發者能夠精確理解和復現他們的設計理念,整機全部物料均可通過自行加工或者購買方式獲取,還特別提供整機裝機說明,幫助開源用戶迅速完成機器人本體的組裝。在整機軟件算法方面,提供了AimRT平臺組件、機器人URDF文件、仿真Sim2Sim、Sim2Real代碼、強化學習訓練代碼、模型轉換、推理工具,和調試工具(數據可視化、遙控器)等等,“一站式”全套圖紙和代碼幫助大家更好地學習人形機器人開發流程。
毫無疑問,靈犀X1的開源大幅降低了機器人開發的門檻,無論是企業還是個人,是學生還是愛好者,都能夠以更簡單的方式去開發機器人的各種軟件算法,包括運動控制、感知系統、人機交互等。
智元靈犀X1機器人開發資料 軟硬件全套圖紙和代碼
https://bbs.elecfans.com/jishu_2460649_1_1.html
BOM清單、整機STEP、整機圖紙(SolidWorks)、裝機SOP。
智元靈犀X1整機標零作業指導書
*附件:智元靈犀X1整機標零作業指導書.xlsx
關于智元靈犀X1
靈犀X1采用串并聯混合構型手臂和差分驅動雙肩關節設計,整臂僅重2.5kg。依托智元X-Lab自研的PowerFlow兩款模塊化關節,實現全身三十多個自由度的精準操控。
另外還支持獨特的“機-機模式”,將手機屏幕作為機器人的“臉”,同時手機也作為機器人的“大腦”。
那么在靈犀X1正式開源后,我們來看一下實際的開源資料都有哪些,是不是普通人也能“手搓”機器人 了?

首先在智元機器人官網上,目前已經放出了靈犀X1的開發指南,官方表示根據該指南即可完成機器人的搭建。而其中設計資料官方也提供了下載鏈接,包括BOM清單、整機STEP、整機圖紙(SolidWorks)、裝機SOP等。
從官方的BOM清單中我們看到,靈犀X1共有175種物料,其中結構件需要自行定制,大部分可以用3D打印制造,也有部分需要進行機加工,比如腳踝連桿就需要用到鈦合金材料,腳踝連接軸用到40Cr鋼等材料。
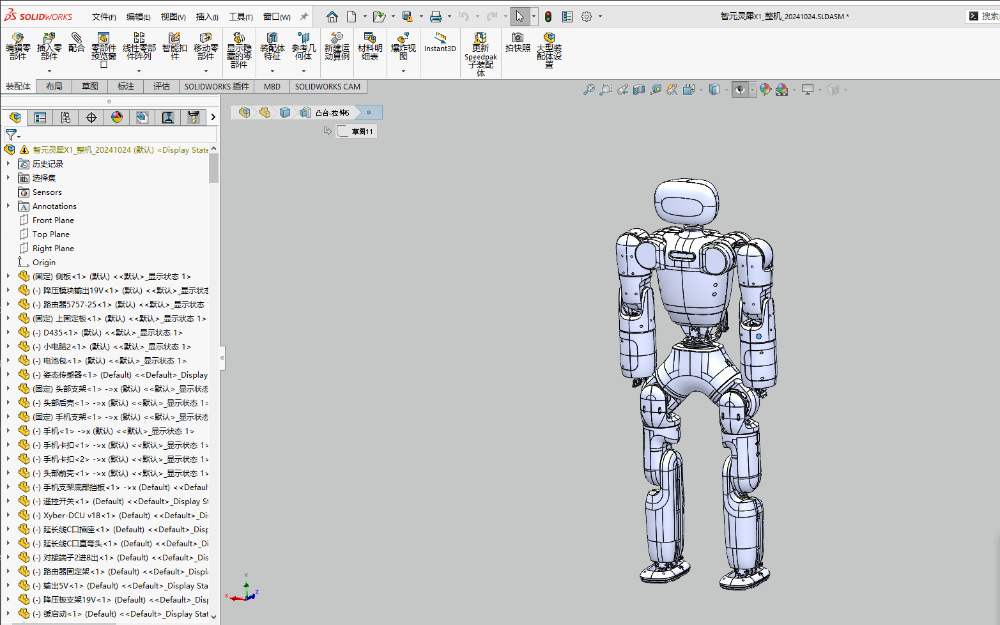
同時智元提供了詳細的整機SolidWorks建模圖紙,可以根據圖紙來進行制作相應的零部件。

在電子硬件部分,可以BOM清單上的部件看到大部分都能夠在網上購買,甚至還給出了相應的購買鏈接。當然核心的PowerFlow關節電機、域控制器DCU等還需要向智元購買,目前官網的通用人形機器人套件,包括6個PowerFlow R86-3、9個PowerFlow R86-2、10個PowerFlow R52、4個PowerFlow L28、2個域控制器 、2個自適應夾爪,售價為54818,并已經售罄。
如果你已經準備好BOM清單上的物料,那么在裝機SOP文件中,智元提供了133頁的整機組裝指導,你可以像搭建樂高積木一樣,按照步驟將零部件組裝成靈犀X1。

在組裝好靈犀X1之后,在軟件部分也同樣可以直接使用智元提供的推理和訓練代碼。據官方文檔介紹,X1的軟件系統基于智元開源組件AimRT作為中間件實現,并且采用強化學習方法進行運動控制。智元提供靈犀X1所使用的強化學習訓練代碼,配合配套的推理軟件可以進行真機和仿真的行走調試,或導入其他機器人模型進行訓練。
官方文檔介紹--智元靈犀X1開發指南
靈犀X1概述
1. 整機結構
靈犀X1全身包含29個關節(R86-29、R86-36、R5210、L284)和2個夾爪,支持擴展頭部3自由度。

2. 整機硬件

3. 開源資料(更新時間:2025.03.07)
3.1 設計資料
BOM清單、整機STEP、整機圖紙(SolidWorks)、裝機SOP可通過以下任一途徑下載:
百度云盤:https://pan.baidu.com/s/1UEdeDBTJiXRmIqMKwmO5RA?pwd=1234(提取碼:1234)
谷歌云盤:https://drive.google.com/drive/folders/1MECbyKRJbnc_XKWsdUbn-70xmYFmw9FW?usp=sharing
Github:https://github.com/AgibotTech/agibot_x1_hardware
3.2 開源代碼
推理代碼:https://github.com/AgibotTech/agibot_x1_infer
訓練代碼:https://github.com/AgibotTech/agibot_x1_train
4. X1整機開發流程(更新時間:2025年1月14日)
依次按照如下流程操作即可完成智元靈犀X1機器人的搭建,
4.1 執行器狀態確認
X1整機裝配前,針對各個執行器做確認工作,防止裝機后需要重新標定設置,以下是執行器的狀態確認流程。
上位機可以通過命令行顯式地更改R86-3/R86-2/R52/L28執行器內部的參數,在第一次使用時建議充分了解參數配置的方法。
注:以R系列的執行器為主,L28執行器有不同點會進行標注。
4.1.1 準備環境
準備一臺Windows系統的電腦,并下載上位機軟件 REF-CLI v1.0.3.exe 。
1.給執行器上電,用 USB-C 數據線(注:L28為4pin USB線)將執行器連接至電腦,并打開上位機軟件。等待上位機識別成功后,會有如下顯示:

此時,編號為 00003986464D 的設備在上位機中的索引名為 ref0,下發指令需要與設備名一致。
在上位機中直接鍵入 ref0 并敲擊回車,會顯示當前執行器的基本信息。根據下圖所示,當前的固件版本為 3.2.7,CAN總線ID為1。

注:可通過機身鐳射的14位SN碼區分執行器版本, 區分方式如下,
SN第6、7位為版本號,有20和30兩種,
X1 0 0X 20 XXXXXXX X1 0 0X 30 XXXXXXX
V2執行器(版本號20)的固件版本為3.2.7
V3執行器(版本號30)的固件版本為3.2.9
- 查詢執行器內部參數模式,輸入指令: ref0.motor.config,默認為模式6=MIT混合控制,如下圖所示:

注:詳細操作方式,見智元靈犀X1 PowerFlow R系列執行器產品手冊。
4.1.2 LED狀態指示
| LED | 含義 |
|---|---|
| 綠色閃爍 | 失能狀態 |
| 綠色常亮 | 使能狀態 |
| 紅色常亮 | 錯誤狀態(注:L28此處為藍色閃爍) |
| 藍色常亮 | 電機校準中(出廠默認校準完畢) |
4.1.3 使能 / 失能
執行器上電后為失能狀態,可以通過以下指令進行狀態切換,并觀察LED狀態進行判定。
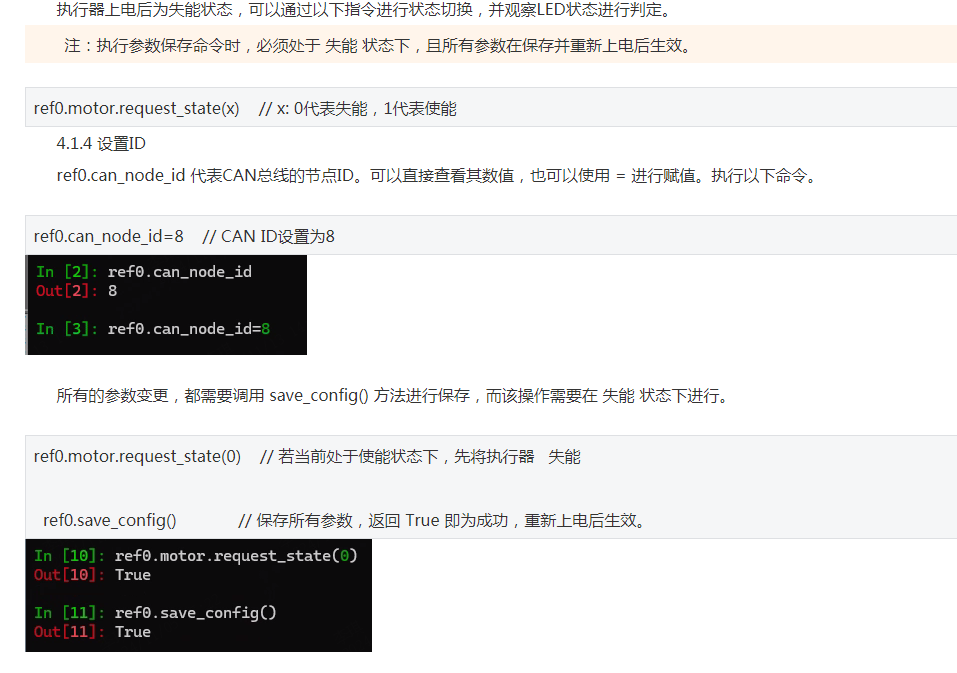
4.1.5 執行器標零
注:L28上電自動回零,不支持手動標零。
用戶可以自行設置執行器的零位,在失能狀態下輸入以下命令:
ref0.motor.apply_user_offset() // 保存當前位置為零位
ref0.motor.request_state(0) // 若當前處于使能狀態下,先將執行器 失能
ref0.save_config() // 保存所有參數,返回 True 即為成功,重新上電后生效。

4.2 執行器桌面聯調測試
4.2.1 接線說明
按照整機接線方案進行連接,包含DCU以及所有關節。

4.2.2 測試步驟
注:該測試是桌面聯調環境,所有關節會使能并執行正反向運動,請勿用于整機環境!!!
PC需要X86架構CPU,并且安裝Ubuntu22.04 實時系統

1.下載聯調測試軟件 xyber_dcu_test_v0.1.3.zip
2.進入 cfg目錄,打開 x1_test_cfg.yaml,修改對應的網卡名稱,也可以屏蔽掉缺失的關節。若不希望執行器運動,可以將 move_actuator 字段設為 false,這樣測試程序只會對執行器進行使能操作以驗證整機通信。imu_dcu_name 字段可以開關IMU數據的檢查,詳見注釋。

3.執行測試腳本,根據提示輸入密碼
4.所有關節會執行 使能->正轉->反轉->停止 步驟,軟件會自動判斷其是否運動到位。觀察日志打印,若測試失敗會紅色打印log。
4.3 整機組裝
完成整機組裝方法請參照3.1 設計資料 中的智元靈犀X1裝機SOP 部分及智元靈犀X1裝機視頻教程https://agibotmall.com/video的說明。
4.4 IMU調試
靈犀X1使用的IMU為 YIS320,具體型號請參考開源BOM清單。
目前軟件中只啟用了下肢DCU所連接的IMU,只連接一個下肢IMU即可。
DCU與IMU是串口通信,波特率為921600,購買IMU需要用其自帶的上位機檢查一下波特率,并將輸出頻率調整至最大值。

4.5 整機硬件部署
請按照如下步驟完成X1整機的硬件確認,
STEP1: 按照SOP接線完成以后,使用萬用表,撥碼到短路測試擋位,測試電池的或者電源的正極(萬用表紅色筆芯)和負極(萬用表黑色筆芯),如果萬用表沒有發出蜂鳴聲,則代表正負極無短路。
STEP2: 正負極確認沒有短路后,把總開關船型開關打開,讓開關處于ON的狀態。
STEP3:拿出整機物料中的鑰匙無線開關,按下ON 按鍵,整機上電。
STEP4:整機上電完畢,沒有出現異常,例如指示燈異常(具體參考4.2指示燈定義)或者異常下電(緩起板指示燈熄滅)等情況,則可以按照手冊進行后續調試步驟。
4.6 整機標零
整機標零請參照* 智元靈犀X1整機標零作業指導書*
4.7 整機軟件部署
軟件部署方法請參照3.2 開源代碼 中的推理代碼部分的說明。
-
機器人
+關注
關注
213文章
29463瀏覽量
211472 -
BOM
+關注
關注
5文章
265瀏覽量
41029 -
人形機器人
+關注
關注
7文章
684瀏覽量
17452 -
智元機器人
+關注
關注
1文章
19瀏覽量
732
發布評論請先 登錄
圖紙代碼完全開源!稚暉君:人人都能造人形機器人!
“0元購”智元靈犀X1機器人,軟硬件全套圖紙和代碼全公開!資料免費下載!
《電子發燒友電子設計周報》聚焦硬科技領域核心價值 第10期:2025.05.6--2025.05.9
《電子發燒友電子設計周報》聚焦硬科技領域核心價值 第11期:2025.05.12--2025.05.16
推薦玩機器人的書
ColorSky雙足機器人開源項目
收機器人、人工智能方面的原創課程視頻,1000元-3000元不等
全自動AI移動機器人(開發手冊+開源資料)

?大象機器人首發萬元級水星Mercury人形機器人系列






 工商網監
工商網監
評論