 人形機器人步入“雙腦協同”時代:破解核心控制器的技術困局
人形機器人步入“雙腦協同”時代:破解核心控制器的技術困局
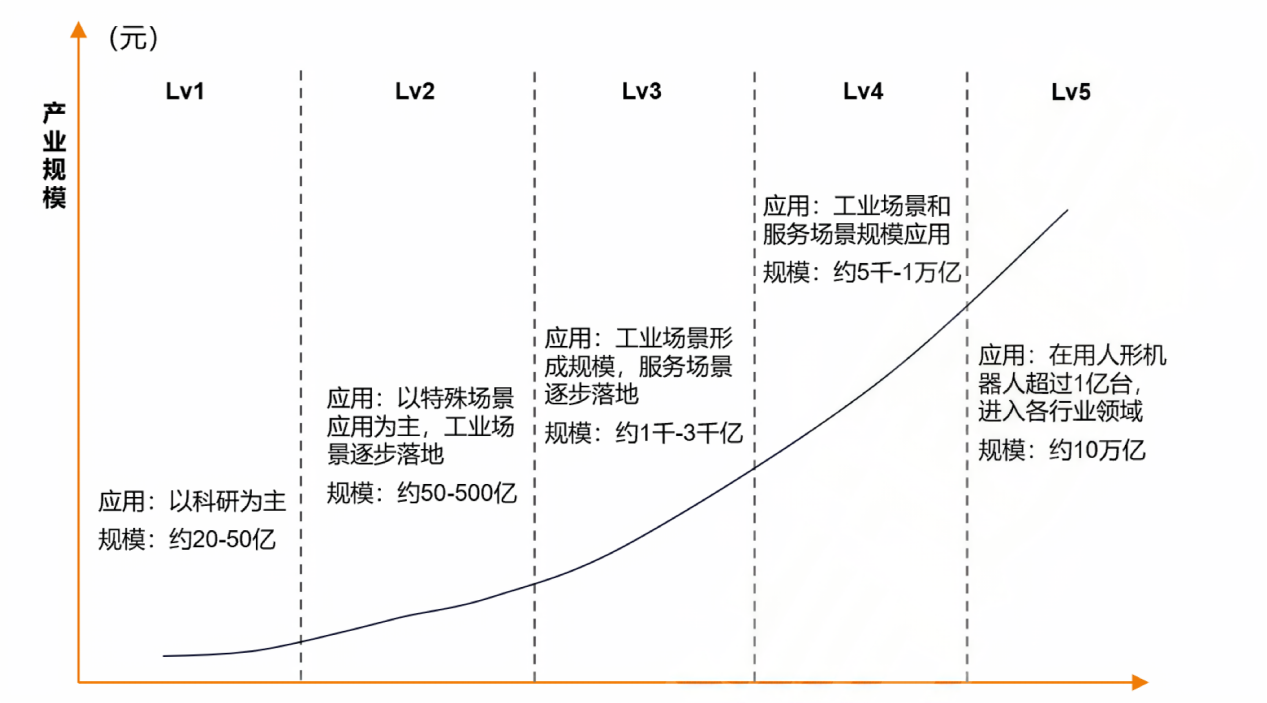
今年以來,全球人形機器人產業迎來關鍵轉折點,據高工機器人產業研究所(GGII)預測,到2035年,全球人形機器人市場規模將超過4000億元。而實現這一目標的核心突破口,正聚焦于曾長期被忽視的“中樞神經系統”——核心控制器領域。面對傳統架構的固有缺陷,阿普奇創新推出“雙腦協同”核心大小腦方案,為行業提供了突破體積、算力、實時性三重枷鎖的技術路徑。
行業痛點:算力、體積與可靠性的“不可能三角”
傳統人形機器人控制器長期面臨三大技術挑戰:
1
算力割裂
分立式架構導致感知與運控單元間的數據交換延遲高達50-100ms,難以支持動態環境下的實時響應。例如,早期許多人形機器人步態失衡情況頻頻出現,其主要原因之一是控制延遲,而這是行業核心技術的重大瓶頸之一。
2
體積矛盾
堆疊式設計使控制器體積普遍偏大,嚴重限制機器人結構設計的靈活性,尤其是在需要高集成度的仿生關節場景中。
3
環境脆弱性
工業場景中的電磁干擾、振動沖擊等問題,導致系統穩定性下降30%以上,例如,某服務機器人曾因散熱不足引發算力降頻,這是其環境適應性不足而導致的。
“雙腦協同”架構的技術突破
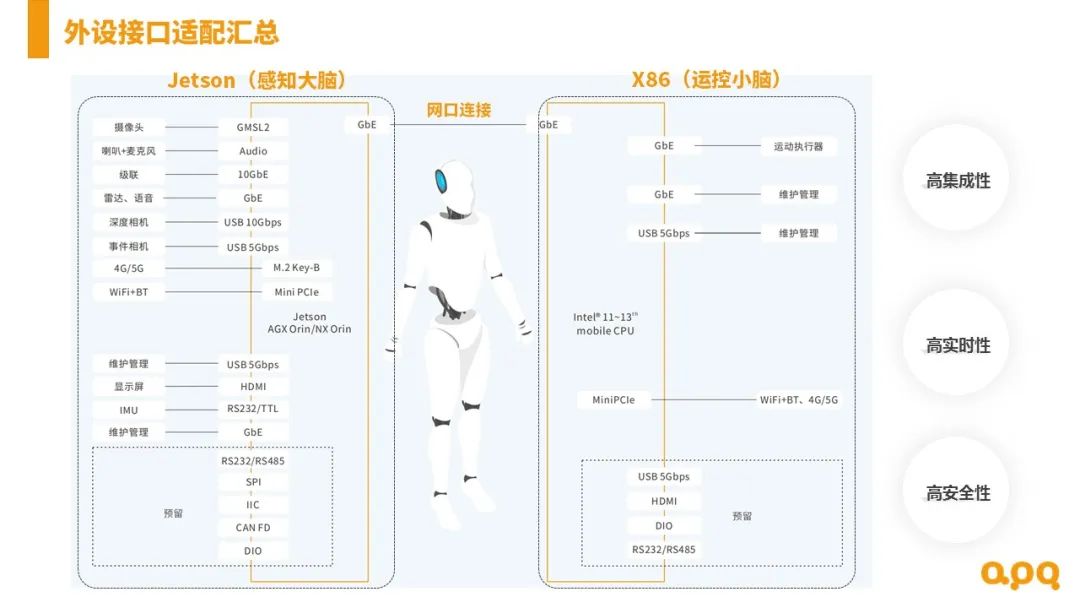
面對當前行業面臨的技術痛點,阿普奇提出的“感知-決策-執行”融合架構,推出具身智能機器人控制器KiWiBot系列,通過“感知大腦+運控小腦”異構融合架構,實現三大技術的創新突破:

1
異構算力融合
●感知大腦搭載NVIDIA Jetson AGX Orin,275TOPS算力可并行處理16路攝像頭數據流;
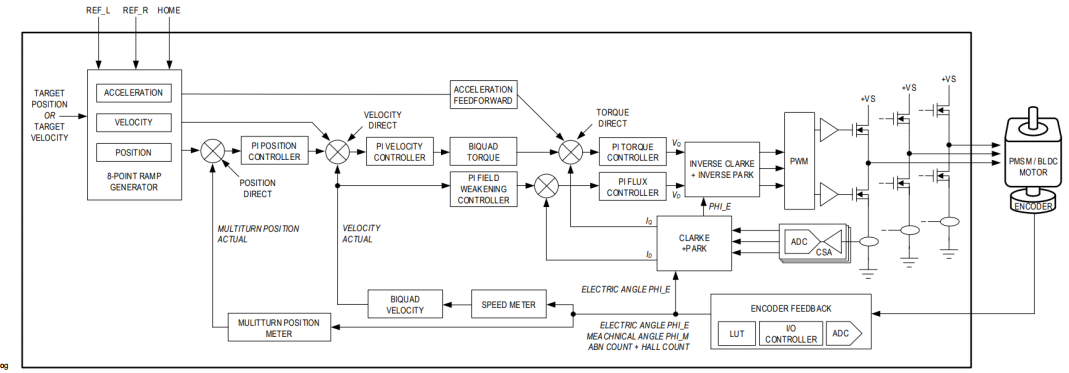
●運控小腦采用Intel x86處理器,能夠在周期內完成多軸伺服電機的力矩閉環控制;
●通過PCIe通道實現數據告訴互通,較傳統CAN總線速率有顯著提升;
2
時空一致性優化
●搭載Linux+RT實時補丁系統,降低任務調度的抖動;
●支持PTP協議,實現傳感器-控制器-執行器的時間同步;;
●通過EtherCAT主站協議,縮短關節控制周期;
3
工業級可靠性設計
●緊湊型機身內集成自研熱管-鰭片復合散熱系統,在-20℃~60℃環境,保持低噪運行;
●狀態自感知模塊實時監測多項設備參數,通過AI故障預測保證設備的健康運維;
隨著高性能計算、實時控制與可靠性設計的持續突破,核心控制器正在從功能模塊進化為機器人的“核心大小腦”。當核心大小腦能夠賦予類人的反射神經與抗干擾能力,具身智能的產業化落地或將迎來質變時刻,阿普奇作為具身機器人核心控制器供應商,將聚焦在高性能計算、可靠性設計、AI計算底座、實時運控優化、安全運維套件等維度,提供高可靠性的核心大小腦,協力突破具身機器人行業在核心控制器上的技術困局。
-
控制器
+關注
關注
114文章
16959瀏覽量
182849 -
人形機器人
+關注
關注
7文章
684瀏覽量
17454
發布評論請先 登錄
ADI如何重塑人形機器人運動核心
破解數據與泛化難題,通用人形機器人研發全面提速

從感知到運控:具身智能機器人控制器的雙腦協同設計與場景適配
4月25-26日 阿普奇將亮相2025中國人形機器人生態大會

EtherCAT科普系列(4):EtherCAT技術在人形機器人靈巧手領域應用

從控制到感知,一文讀懂納芯微的人形機器人布局(下篇)

從控制到感知,一文讀懂納芯微的人形機器人布局(上篇)

突破人形機器人控制器性能瓶頸:高效穩定的電容器解決方案
具身智能照進現實,物理 AI 解人形機器人量產困局
春晚后人形機器人升級,驚呆網友:中國的AI技術不可想象
研華模塊化電腦SOM-7583:打造人形機器人超強“小腦”控制器






 工商網監
工商網監
評論