") Profibus-DP總線磁致伸縮位移傳感器設(shè)計(jì)
Profibus-DP總線磁致伸縮位移傳感器設(shè)計(jì)
0、引言
測(cè)量技術(shù)是現(xiàn)代工業(yè)生產(chǎn)和科學(xué)研究中必不可少的一項(xiàng)技術(shù),其中基于磁致伸縮效應(yīng)的位移測(cè)量技術(shù)因其穩(wěn)定性好、量程大以及便于安裝維護(hù)等優(yōu)點(diǎn),被廣泛應(yīng)用于各種民用和軍用領(lǐng)域。同時(shí),隨著信息技術(shù)的發(fā)展,工業(yè)控制系統(tǒng)正朝網(wǎng)絡(luò)化、分散化和智能化方向發(fā)展,現(xiàn)場(chǎng)總線因其所具有的抗干擾能力、數(shù)字通信、高環(huán)境適應(yīng)性等特點(diǎn),良好地滿足了此趨勢(shì)要求。
Profibus總線技術(shù)由德國(guó)SIEMENS公司于1987年提出,具有統(tǒng)一總線標(biāo)準(zhǔn)、傳輸速度快、對(duì)復(fù)雜系統(tǒng)適應(yīng)性強(qiáng)以及應(yīng)用廣、可實(shí)現(xiàn)“即插即用”的特點(diǎn)。其中Profibus-DP是一種高速的低成本通信連接,用于設(shè)備及控制系統(tǒng)與分散式I/O設(shè)備間的通信,在工業(yè)現(xiàn)場(chǎng)應(yīng)用最廣泛。
本文設(shè)計(jì)了一種基于Profibus-DP協(xié)議的位移傳感器,采用ARM+FPGA架構(gòu),實(shí)現(xiàn)了基于磁致伸縮原理的位移測(cè)量,并通過Profibus-DP協(xié)議與主站進(jìn)行位移數(shù)據(jù)傳輸。
1、系統(tǒng)設(shè)計(jì)
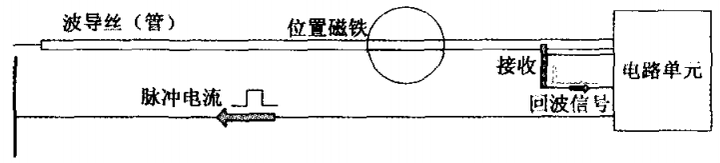
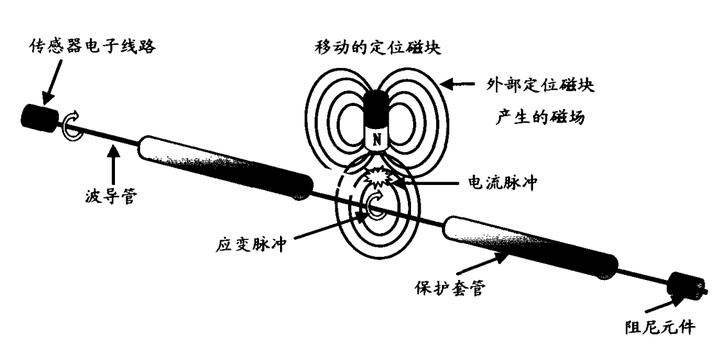
本文所設(shè)計(jì)的位移傳感器基于磁致伸縮原理,系統(tǒng)通過產(chǎn)生一定周期的激勵(lì)脈沖激勵(lì)波導(dǎo)絲,當(dāng)激勵(lì)波遇到位移測(cè)量處的永久磁鐵的磁場(chǎng)時(shí)將產(chǎn)生磁致伸縮效應(yīng),所產(chǎn)生的扭轉(zhuǎn)波將沿著波導(dǎo)絲以固定的速度傳播,通過在近端檢測(cè)扭轉(zhuǎn)波和激勵(lì)波的時(shí)間差即可以實(shí)現(xiàn)位移的測(cè)量。磁致伸縮位移測(cè)量系統(tǒng)工作原理如圖1所示。
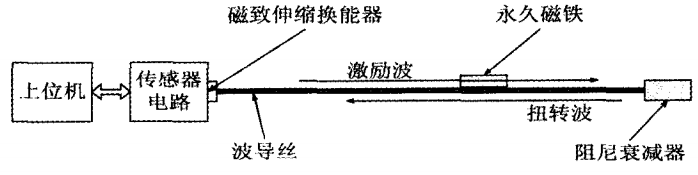 磁致伸縮位移傳感器工作原理
磁致伸縮位移傳感器工作原理
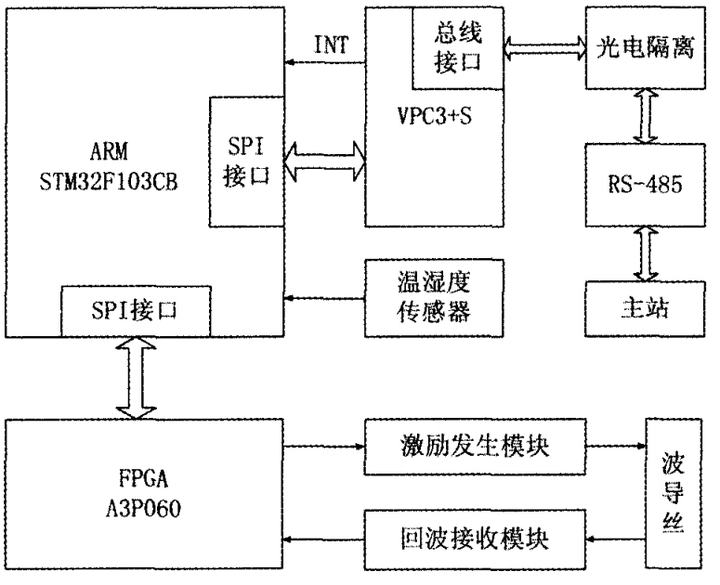
本文設(shè)計(jì)的傳感器電路主要包括激勵(lì)脈沖發(fā)生模塊、回波接收模塊、回波檢測(cè)和測(cè)量模塊、位移計(jì)算和補(bǔ)償模塊、Profibus-DP總線通信模塊、主控模塊等。其中主控處理器選用ST公司的基于ARM Cortex-M33內(nèi)核的STM32F103CB完成系統(tǒng)主控、位移計(jì)算和補(bǔ)償?shù)裙δ埽?a href="http://www.asorrir.com/tags/actel/" target="_blank">Actel公司的A3P060FPGA作為高速單元實(shí)現(xiàn)高精度的回波檢測(cè)和測(cè)量;Profichip公司的VPC3+S作為總線協(xié)議芯片實(shí)現(xiàn)基于Profibus-DP總線協(xié)議的位移數(shù)據(jù)傳輸。位移傳感器系統(tǒng)框圖如下圖所示。
 Profibus-DP位移傳感器系統(tǒng)硬件總體框圖
Profibus-DP位移傳感器系統(tǒng)硬件總體框圖
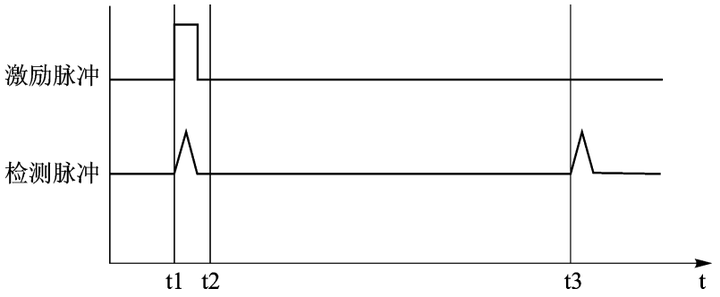
系統(tǒng)工作時(shí),A3P060按照設(shè)定的周期T控制激勵(lì)脈沖發(fā)生模塊產(chǎn)生激勵(lì)脈沖,激勵(lì)脈沖電流將產(chǎn)生環(huán)向磁場(chǎng)并沿著波導(dǎo)絲傳播,遇到待測(cè)量位置磁鐵的磁場(chǎng)時(shí),產(chǎn)生磁致伸縮效應(yīng),波導(dǎo)絲將產(chǎn)生機(jī)械扭轉(zhuǎn),從而形成扭轉(zhuǎn)波沿波導(dǎo)絲傳播,在近端被回波檢測(cè)裝置轉(zhuǎn)換為電信號(hào)送入回波接收模塊中處理。回波接收模塊會(huì)對(duì)信號(hào)進(jìn)行濾波和放大處理后送人比較器,并由A3P060完成回波信號(hào)的時(shí)間檢測(cè)。A3P060將檢測(cè)得到的時(shí)間信息通過SPI接口發(fā)送至處理器STM32F103CB,STM32F103CB利用數(shù)據(jù)處理和位移計(jì)算算法對(duì)采集到的時(shí)間信息進(jìn)行位移計(jì)算、溫度補(bǔ)償以及位移非線性補(bǔ)償處理后,最后將計(jì)算的位移經(jīng)SPI接口傳送至Profibus-DP通信模塊VPC3+S,完成與主站的數(shù)據(jù)交換。
系統(tǒng)設(shè)計(jì)中采用RS485總線作為Profibus-DP的物理層接口,總線接口線路均通過光電隔離模塊連接到DP總線,以保證數(shù)據(jù)的可靠通信。
溫濕度傳感器選用DHT11數(shù)字溫濕度傳感器,采用單線雙向制,由STM32F103CB主動(dòng)讀取傳感器的數(shù)據(jù)信息。
2、Profibus-DP協(xié)議實(shí)現(xiàn)
Profibus-DP總線協(xié)議集成了ISO/OSI模型的物理層、數(shù)據(jù)鏈路層,并根據(jù)實(shí)際需求加入用戶層。一個(gè)DP系統(tǒng),最多支持使用126個(gè)站點(diǎn),各站點(diǎn)賦予唯一的邏輯地址。DP系統(tǒng)采用令牌控制+分時(shí)輪詢的Token_Passing主從輪詢協(xié)議,兼具分散式和主從式控制機(jī)制特點(diǎn),特別適合對(duì)反應(yīng)時(shí)間、可靠性、網(wǎng)絡(luò)負(fù)荷有特殊要求的通信。
本系統(tǒng)選用VPC3+S實(shí)現(xiàn)Profibus-DP總線協(xié)議,采用SPI接口實(shí)現(xiàn)VPC3+S與STM32F103CB的通信。VPC3+S是完整集成Profibus-DP協(xié)議的通信芯片,支持?jǐn)?shù)據(jù)傳輸速率達(dá)到12Mb/s,在系統(tǒng)中完成地址識(shí)別、處理通信中的信息、數(shù)據(jù)安全序列以及DP通信協(xié)議的處理等任務(wù)。
3、軟件設(shè)計(jì)
3.1主流程
主流程主要進(jìn)行系統(tǒng)及各模塊的初始化以及數(shù)據(jù)處理和位移計(jì)算,流程圖如下圖。
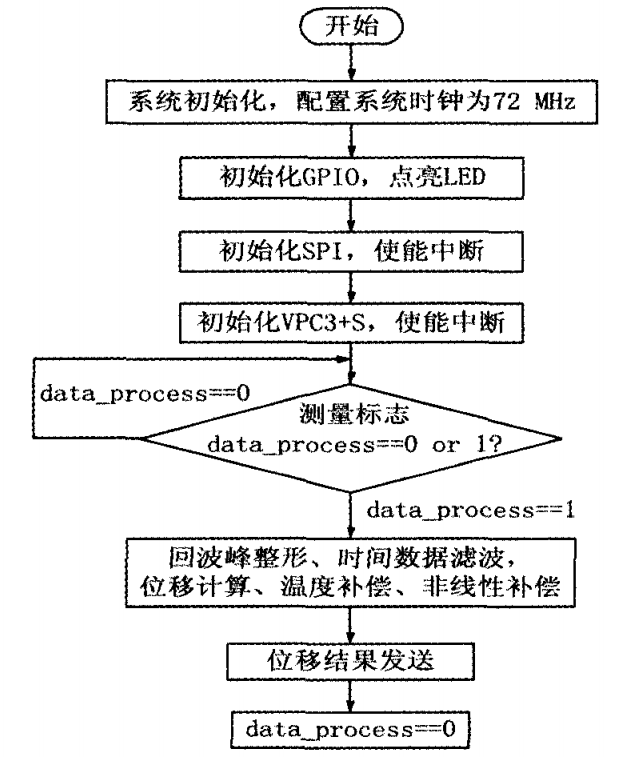 Profibus-DP位移傳感器主流程模塊框圖
Profibus-DP位移傳感器主流程模塊框圖
上電時(shí),首先系統(tǒng)初始化,設(shè)置STM32F103CB工作頻率。接著對(duì)GPIO、SPI等外設(shè)進(jìn)行初始化操作,點(diǎn)亮LED工作指示燈。再對(duì)通信芯片VPC3+S進(jìn)行初始化和配置操作,然后不斷查詢數(shù)據(jù)準(zhǔn)備好標(biāo)志位。STM32F103CB通過SPI中斷接收時(shí)間數(shù)據(jù),主程序?qū)夭ǚ逭巍r(shí)間數(shù)據(jù)濾波,再計(jì)算位移并對(duì)位移結(jié)果進(jìn)行溫度補(bǔ)償和非線性補(bǔ)償。最后,STM32F103CB通過SPI中斷發(fā)送位移結(jié)果到通信芯片VPC3+S。VPC3+S將位移數(shù)據(jù)封裝成Profibus-DP幀格式,發(fā)送到RS485總線上。
3.2位移計(jì)算模塊
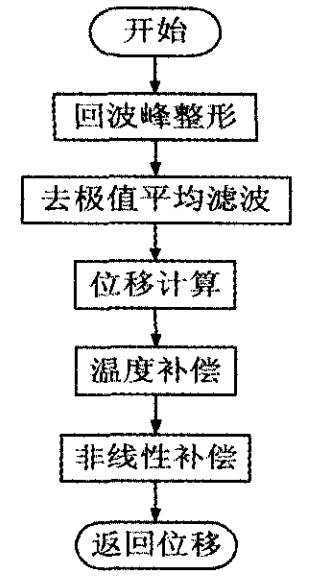
FPGA將時(shí)間數(shù)據(jù)通過SPI發(fā)送到STM32F103CB,如果有符合條件的回波峰,選出并計(jì)算該峰上升沿和下降沿的平均值,然后將該平均值送入數(shù)據(jù)濾波處理函數(shù)進(jìn)行去極值平均處理,提高數(shù)據(jù)穩(wěn)定性,最后將處理后的位移值通過SPI發(fā)送給VPC3+S通信芯片。位移計(jì)算流程圖如下圖。
 Profibus-DP位移傳感器計(jì)算模塊流程
Profibus-DP位移傳感器計(jì)算模塊流程
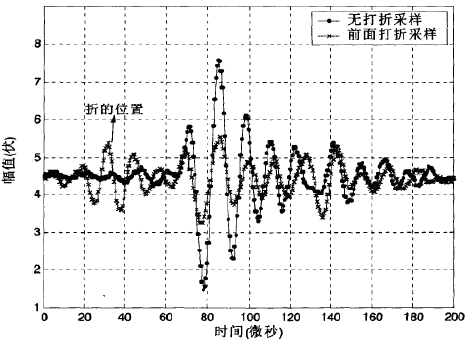
選取峰的原則為:若最高級(jí)幅值有符合條件的峰,則取最高級(jí)幅值的峰,否則取次高一級(jí)幅值的峰,以此類推;若最高一級(jí)幅值符合條件的峰不止一個(gè),則取前面的峰。取最大一級(jí)幅值對(duì)應(yīng)的上升沿和下降沿的時(shí)間平均值作為當(dāng)前回波峰的時(shí)間數(shù)據(jù)。
系統(tǒng)的時(shí)間數(shù)據(jù)采用去極值平均濾波,隨后系統(tǒng)對(duì)數(shù)據(jù)進(jìn)行去抖動(dòng)處理、溫度補(bǔ)償和非線性補(bǔ)償處理,得到最終的延時(shí)數(shù)據(jù),數(shù)據(jù)乘以波速得到位移數(shù)據(jù)。
3.3VPC3+S通信模塊
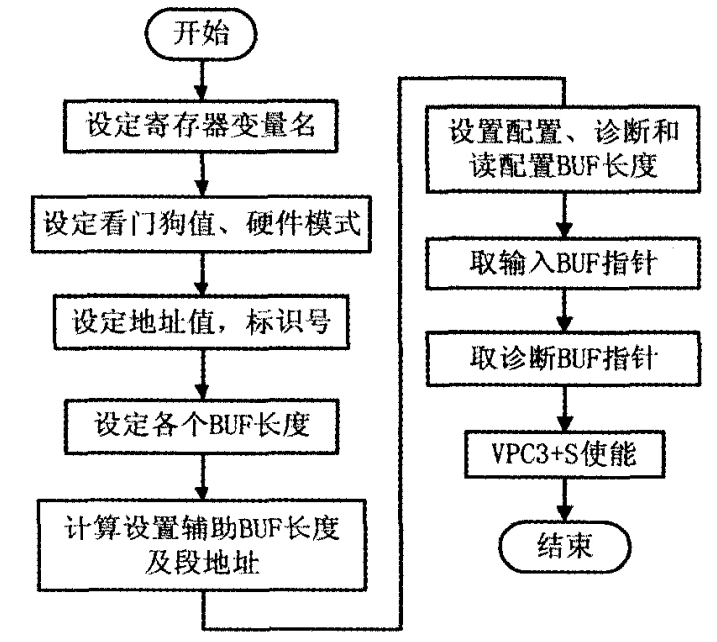
實(shí)現(xiàn)Profibus-DP主從站通信過程,首先要對(duì)從站VPC3+S進(jìn)行初始化。主要內(nèi)容包括:中斷及功能寄存器值配置、從站地址值設(shè)定、看門狗設(shè)置、內(nèi)部空間計(jì)算、緩沖區(qū)分配等。初始化流程如下圖所示。
 Profibus-DP位移傳感器VPC3+S通信模塊流程
Profibus-DP位移傳感器VPC3+S通信模塊流程
從站系統(tǒng)經(jīng)過初始化操作和使能,通過主站確認(rèn)信息進(jìn)入工作狀態(tài),與主站進(jìn)行循環(huán)數(shù)據(jù)交換。從站判斷主站是否有數(shù)據(jù)輸出,有則讀取,否則可以直接將采集到的現(xiàn)場(chǎng)數(shù)據(jù)主動(dòng)地發(fā)送給主站,如此循環(huán)。同時(shí)從站可以及時(shí)響應(yīng)主站的參數(shù)化、組態(tài)、修改地址等中斷請(qǐng)求。
4、系統(tǒng)調(diào)試與測(cè)試
從站搭建調(diào)試完成,構(gòu)建完整通信系統(tǒng)還需主站。本設(shè)計(jì)使用瑞典HMS工業(yè)網(wǎng)絡(luò)有限公司提供的Any-bus-M系列板卡AB5030主站模塊。
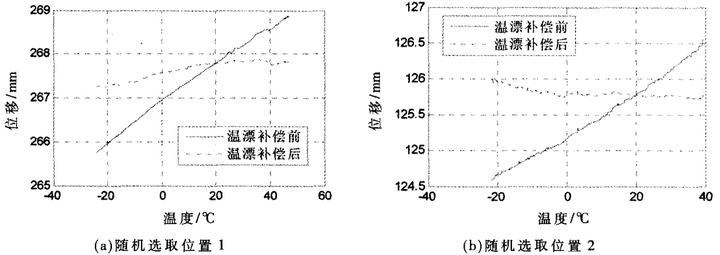 Profibus-DP位移傳感器溫漂補(bǔ)償測(cè)試
Profibus-DP位移傳感器溫漂補(bǔ)償測(cè)試
本文對(duì)系統(tǒng)的溫漂性能進(jìn)行了測(cè)試,上圖(a)和(b)分別給出了同一個(gè)組件在隨機(jī)選取位置升溫和降溫情況下測(cè)得的溫漂結(jié)果。測(cè)試時(shí)保持測(cè)量位置不變,改變環(huán)境溫度,測(cè)得相應(yīng)的位移信息。圖中橫坐標(biāo)為溫度,縱坐標(biāo)為測(cè)量得到的位移,實(shí)線為補(bǔ)償前的,虛線為補(bǔ)償后的。由圖可見,在溫漂補(bǔ)償前,在60℃的大溫差范圍內(nèi),位移溫漂分別達(dá)到3mm和2mm左右,采用溫度補(bǔ)償算法后溫漂降低到0.5mm和0.3mm左右,滿足產(chǎn)品(6μm+5ppm×L)/℃的溫漂要求,其中L為組件長(zhǎng)度。
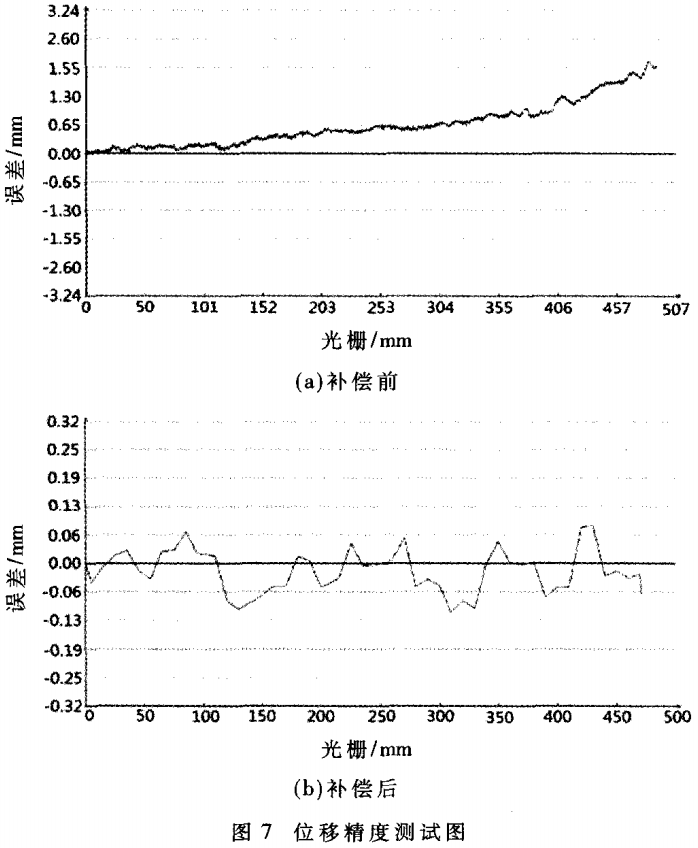 Profibus-DP位移傳感器精度測(cè)試
Profibus-DP位移傳感器精度測(cè)試
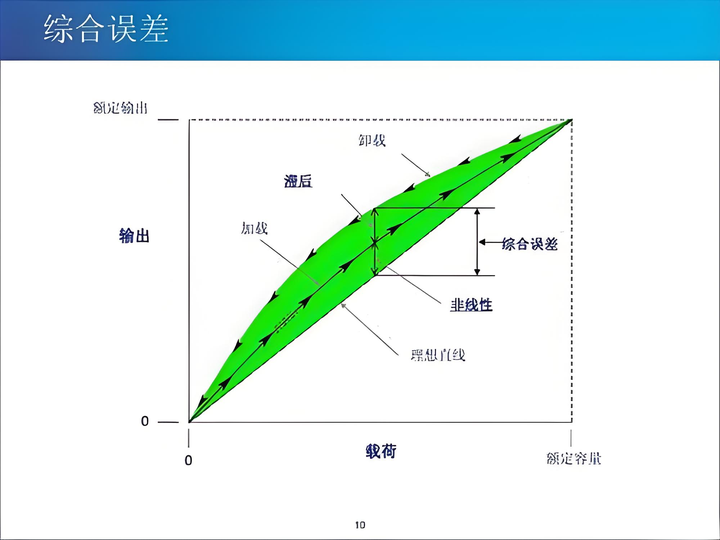
上圖(a)和圖7(b)是位移精度測(cè)試圖,圖中橫坐標(biāo)為光柵尺測(cè)得的位移,縱坐標(biāo)為本系統(tǒng)測(cè)試得到的位移與光柵尺測(cè)得位移的誤差值。上圖(a)為未非線性位移補(bǔ)償前的測(cè)量誤差,上圖(b)為補(bǔ)償后的測(cè)量誤差。由圖可知,經(jīng)補(bǔ)償后在整個(gè)量程范圍內(nèi),測(cè)量誤差控制在±0.1mm范圍內(nèi),滿足系統(tǒng)精度的要求。
5、總結(jié)
本文提出了基于Profibus-DP總線的位移傳感器設(shè)計(jì)方案,采用ARM+FPGA的系統(tǒng)架構(gòu)將位移測(cè)量轉(zhuǎn)化為時(shí)間測(cè)量。測(cè)量結(jié)果表明,該位移傳感器分辨率達(dá)到10μm,通過設(shè)計(jì)溫漂補(bǔ)償算法和非線性位移補(bǔ)償算法,測(cè)量精度達(dá)到±0.1mm,滿足設(shè)計(jì)要求。系統(tǒng)采用Profibus-DP總線,實(shí)現(xiàn)了位移傳感器網(wǎng)絡(luò)化、智能化的要求。實(shí)踐表明,將該位移傳感器應(yīng)用在工業(yè)機(jī)床中,運(yùn)行穩(wěn)定,測(cè)量結(jié)果準(zhǔn)確,抗干擾能力強(qiáng)。
審核編輯 黃宇
-
位移傳感器
+關(guān)注
關(guān)注
5文章
1137瀏覽量
34979 -
PROFIBUS
+關(guān)注
關(guān)注
3文章
450瀏覽量
38884 -
DP
+關(guān)注
關(guān)注
1文章
227瀏覽量
40588
發(fā)布評(píng)論請(qǐng)先 登錄

磁致伸縮位移傳感器濾波器件的特點(diǎn)及選擇
STM32的磁致伸縮智能位移傳感器研究
磁致伸縮位移傳感器誤差分析
EtherCAT在磁致伸縮位移傳感器中的應(yīng)用
現(xiàn)場(chǎng)總線磁致伸縮位移傳感器
PROFIBUS在磁致伸縮位移傳感器中的使用
R系列PROFIBUS磁致伸縮位移傳感器
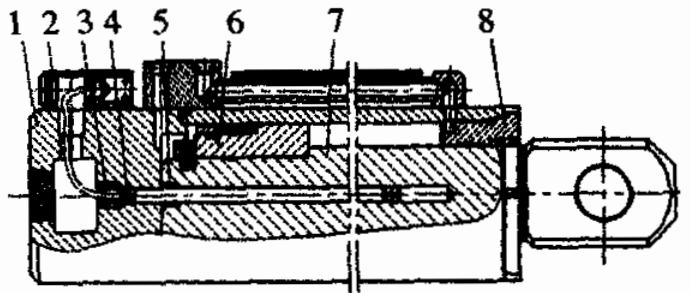
內(nèi)置磁致伸縮位移傳感器的推移油缸







 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論