") 大象機(jī)器人推出myAGV復(fù)合機(jī)器人智慧物流套裝
大象機(jī)器人推出myAGV復(fù)合機(jī)器人智慧物流套裝
在數(shù)字經(jīng)濟(jì)與實(shí)體經(jīng)濟(jì)深度融合的當(dāng)下,機(jī)器人技術(shù)、人工智能技術(shù)已經(jīng)在眾多傳統(tǒng)實(shí)業(yè)中被廣泛利用,通過自動(dòng)化流程有效地提高生產(chǎn)效率和降低運(yùn)營成本,職業(yè)教育、高等教育的實(shí)踐教學(xué)亟需與產(chǎn)業(yè)前沿接軌。
大象機(jī)器人重磅推出賽級場景模擬方案——myAGV復(fù)合機(jī)器人智慧物流套裝,以"技術(shù)全集成、教學(xué)零門檻、場景真落地"為核心價(jià)值,為院校、科研機(jī)構(gòu)及行業(yè)賽事打造了一站式智慧物流實(shí)訓(xùn)解決方案。
場景深剖:
硬核技術(shù)驅(qū)動(dòng)教育創(chuàng)新
物流運(yùn)輸行業(yè)是與群眾民生息息相關(guān)的傳統(tǒng)實(shí)業(yè)巨頭,在新質(zhì)生產(chǎn)力的變革引領(lǐng)下,全球智慧物流產(chǎn)業(yè)正在快速發(fā)展。
據(jù)《2025年中國智慧物流行業(yè)數(shù)字化轉(zhuǎn)型與投資戰(zhàn)略報(bào)告》顯示,2023年中國智能物流市場規(guī)模突破8000億元,并預(yù)測2025年將突破1.2萬億元,AGV(自動(dòng)導(dǎo)引車)、AMR(自主移動(dòng)機(jī)器人)、智能分揀系統(tǒng)等核心技術(shù)已滲透至汽車制造、3C電子、醫(yī)藥流通等十大核心領(lǐng)域。
"十四五"規(guī)劃中將"智能物流與供應(yīng)鏈"列為數(shù)字經(jīng)濟(jì)重點(diǎn)工程,強(qiáng)調(diào)"加強(qiáng)物流人才隊(duì)伍建設(shè),推進(jìn)物流行業(yè)技能培訓(xùn)和教育改革",并要求職業(yè)院校"培養(yǎng)高素質(zhì)專業(yè)人才"。
然而,行業(yè)高速發(fā)展的背后,卻面臨嚴(yán)峻挑戰(zhàn):"技術(shù)迭代速度"與"人才供給斷層"的矛盾日益凸顯——企業(yè)需求側(cè)要求工程師兼具機(jī)器人運(yùn)動(dòng)控制、多機(jī)協(xié)同調(diào)度、AI視覺算法等跨領(lǐng)域能力,而教育供給側(cè)仍依賴傳統(tǒng)"單點(diǎn)式"教學(xué),導(dǎo)致畢業(yè)生難以快速適配智能倉儲(chǔ)、柔性產(chǎn)線等真實(shí)場景。
myAGV復(fù)合機(jī)器人智慧物流套裝的誕生,正是基于此需求做出的重點(diǎn)突破。這款深度融合AGV導(dǎo)航、機(jī)械臂控制、AI視覺的桌面級教育裝備,通過場景復(fù)現(xiàn)、技術(shù)棧開源、產(chǎn)學(xué)研實(shí)踐實(shí)現(xiàn)理論學(xué)習(xí)與應(yīng)用實(shí)踐閉環(huán)。
全場景沙盤:
從理論到實(shí)踐的閉環(huán)
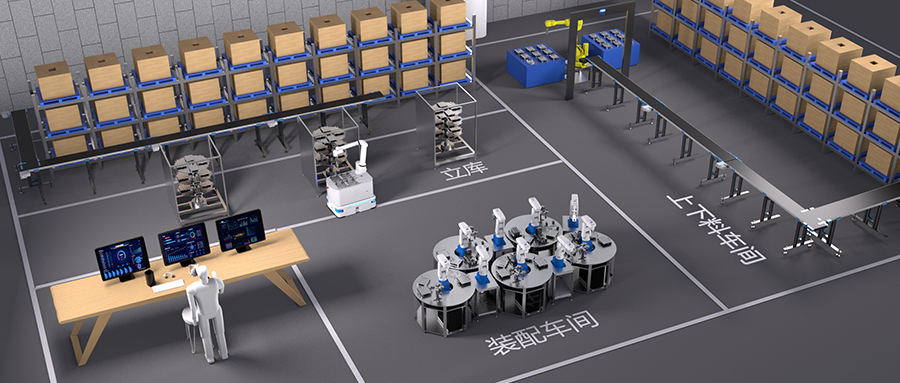
深度模擬工業(yè)場景,基于真實(shí)物流倉儲(chǔ)需求,myAGV復(fù)合機(jī)器人智慧物流套裝構(gòu)建了覆蓋"自主導(dǎo)航 - 避障 - 分揀 - 搬運(yùn) - 回充"的全流程場景沙盤。
myAGV復(fù)合機(jī)器人將在場景中完成:
多目標(biāo)路徑規(guī)劃(Dijkstra算法優(yōu)化路徑效率)
AI視覺分揀(支持ARUCO碼、QR碼、OCR文本識別)
機(jī)械臂協(xié)同作業(yè)(±0.5mm重復(fù)定位精度,250g負(fù)載抓取)
自動(dòng)回充管理(紅外定位+智能電量監(jiān)測,續(xù)航無憂)
可視化UI(一鍵啟動(dòng),全流程自動(dòng)化)
通過全流程自動(dòng)化任務(wù),學(xué)生可直觀理解智慧物流系統(tǒng)的核心邏輯,無縫對接企業(yè)真實(shí)應(yīng)用場景。
技術(shù)內(nèi)核:
ROS開源生態(tài)+多技術(shù)融合
ROS全棧支持:基于Robot Operating System(ROS)架構(gòu),提供RVIZ仿真環(huán)境支持。允許用戶實(shí)時(shí)顯示、采集機(jī)械臂及AGV小車的狀態(tài)信息。
支持Python/C++雙語言開發(fā)。提供標(biāo)準(zhǔn)化驅(qū)動(dòng)庫(PyPI一鍵安裝)
學(xué)生可深度學(xué)習(xí):
機(jī)械臂運(yùn)動(dòng)學(xué)控制(MDH模型、Pieper逆解算法)
SLAM建圖與導(dǎo)航(Trajectory Rollout動(dòng)態(tài)避障)
多傳感器數(shù)據(jù)融合(激光雷達(dá)、IMU、3D視覺同步協(xié)作)
開放式的開發(fā)環(huán)境,助力學(xué)生從底層代碼到系統(tǒng)集成能力全面提升,培養(yǎng)"軟硬一體"的復(fù)合型人才。
深化延展-AI視覺與算法實(shí)戰(zhàn),套裝集成3D相機(jī)與OpenCV/YOLO框架,英偉達(dá)高性能邊緣計(jì)算芯片加持,支持自主深化延展:
物體位姿估計(jì)(點(diǎn)云數(shù)據(jù)實(shí)時(shí)處理)
動(dòng)態(tài)目標(biāo)追蹤(深度學(xué)習(xí)模型訓(xùn)練與部署)
工業(yè)級分揀邏輯(多級分類與優(yōu)先級調(diào)度)
通過真實(shí)數(shù)據(jù)訓(xùn)練與算法優(yōu)化,學(xué)生可掌握AI在智能制造中的落地方法論。
教育賦能:
產(chǎn)教融合的最高標(biāo)準(zhǔn)
階梯式課程體系
從入門到精通的64課時(shí)全鏈路
基礎(chǔ)層:ROS系統(tǒng)搭建、機(jī)器人控制基礎(chǔ)、傳感器原理(16課時(shí))
進(jìn)階層:SLAM建圖與導(dǎo)航、3D SLAM技術(shù)、AI視覺識別技術(shù)(32課時(shí))
實(shí)戰(zhàn)層:智慧物流系統(tǒng)集成、工業(yè)級任務(wù)優(yōu)化調(diào)度策略、創(chuàng)新項(xiàng)目開發(fā)(16課時(shí))
配套資源涵蓋PPT、代碼案例、實(shí)訓(xùn)手冊、視頻教程,支持教師快速開課,學(xué)生即學(xué)即用。
賽事與科研雙驅(qū)動(dòng)
以賽促學(xué):
產(chǎn)品設(shè)計(jì)兼容"全國職業(yè)院校技能大賽"、"世界機(jī)器人大賽"等賽事標(biāo)準(zhǔn),提供定制化賽題支持(如動(dòng)態(tài)避障效率挑戰(zhàn)、多機(jī)器人協(xié)同分揀)。
科研孵化:
開放API接口與硬件模型,支持二次開發(fā)(如5G模塊、數(shù)字孿生系統(tǒng)接入),助力院校申報(bào)省級/國家級科研課題,產(chǎn)出專利與論文成果。
職業(yè)教育數(shù)字化轉(zhuǎn)型
套裝采用桌面級設(shè)計(jì)(占地面積僅350*225cm),單套設(shè)備即可支撐4-6人小組實(shí)訓(xùn),采購成本僅為工業(yè)級設(shè)備1/10。支持AGV、機(jī)械臂、視覺系統(tǒng)獨(dú)立拆分教學(xué),滿足院校從基礎(chǔ)教學(xué)到科研創(chuàng)新的多層次需求。
2025年智能制造業(yè)相關(guān)領(lǐng)域人才缺口將達(dá)百萬級別,myAGV復(fù)合機(jī)器人智慧物流套裝將協(xié)助高職院校、高等院校將理論學(xué)習(xí)與應(yīng)用實(shí)踐相結(jié)合,構(gòu)建"教學(xué) - 實(shí)訓(xùn) - 產(chǎn)業(yè)"無縫銜接的育人生態(tài),為行業(yè)輸送"懂理論、精技術(shù)、能實(shí)戰(zhàn)"的新工科人才,歡迎垂聯(lián),共同打造產(chǎn)教融合標(biāo)桿。
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
29463瀏覽量
211512 -
人工智能
+關(guān)注
關(guān)注
1804文章
48677瀏覽量
246364 -
智慧物流
+關(guān)注
關(guān)注
2文章
444瀏覽量
14621 -
大象機(jī)器人
+關(guān)注
關(guān)注
0文章
85瀏覽量
67
原文標(biāo)題:賽級場景模擬,機(jī)器人實(shí)訓(xùn)新生態(tài),myAGV復(fù)合機(jī)器人智慧物流套裝首發(fā)!
文章出處:【微信號:ElephantRobotics,微信公眾號:大象機(jī)器人】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
智能復(fù)合機(jī)器人:糾偏算法如何重塑工業(yè)精度與效率?
盤點(diǎn)#機(jī)器人開發(fā)平臺
大象機(jī)器人攜手進(jìn)迭時(shí)空推出 RISC-V 全棧開源六軸機(jī)械臂產(chǎn)品
復(fù)合機(jī)器人是通過什么導(dǎo)航方式?

富唯智能最小復(fù)合機(jī)器人的強(qiáng)大抓取實(shí)力?

復(fù)合機(jī)器人能滿足多少毫米級的定位?
復(fù)合機(jī)器人抓取精度的影響因素及提升策略
軟通天樞發(fā)布軟通天匯復(fù)合機(jī)器人系列產(chǎn)品
大象機(jī)器人以科技治愈人心
多功能復(fù)合機(jī)器人設(shè)計(jì)方案

復(fù)合機(jī)器人正逐漸在倉儲(chǔ)物流領(lǐng)域發(fā)揮重要作用
一臺復(fù)合機(jī)器人需要多少錢?

復(fù)合機(jī)器人:開啟智能倉儲(chǔ)新篇章

復(fù)合機(jī)器人倉庫搬運(yùn)方案






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論