 RDK賦能“蟻界天敵”:AI巡邏兵24小時在線!紅火蟻無處遁形!
RDK賦能“蟻界天敵”:AI巡邏兵24小時在線!紅火蟻無處遁形!
紅火蟻,農業的“頭號反派”,不僅咬人,還會啃電線、引發火災,連國家都高度重視它的防治。可現有的除蟻手段精準度不高、效率低,根本趕不上紅火蟻的擴張速度。
于是,“基于AI視覺和自主探索導航的紅火蟻防治機器人”登場!它能自主巡邏、精準識別、智能除蟻,像紅火蟻的天敵一樣持續對抗,讓蟻患問題大大減少。目標很簡單:讓紅火蟻少折騰,讓農田、社區更安心!————深圳大學:蟻嵌是蟻嵌,蟹仔是蟹仔團隊。
一、創新與特色
1.1 作品特色
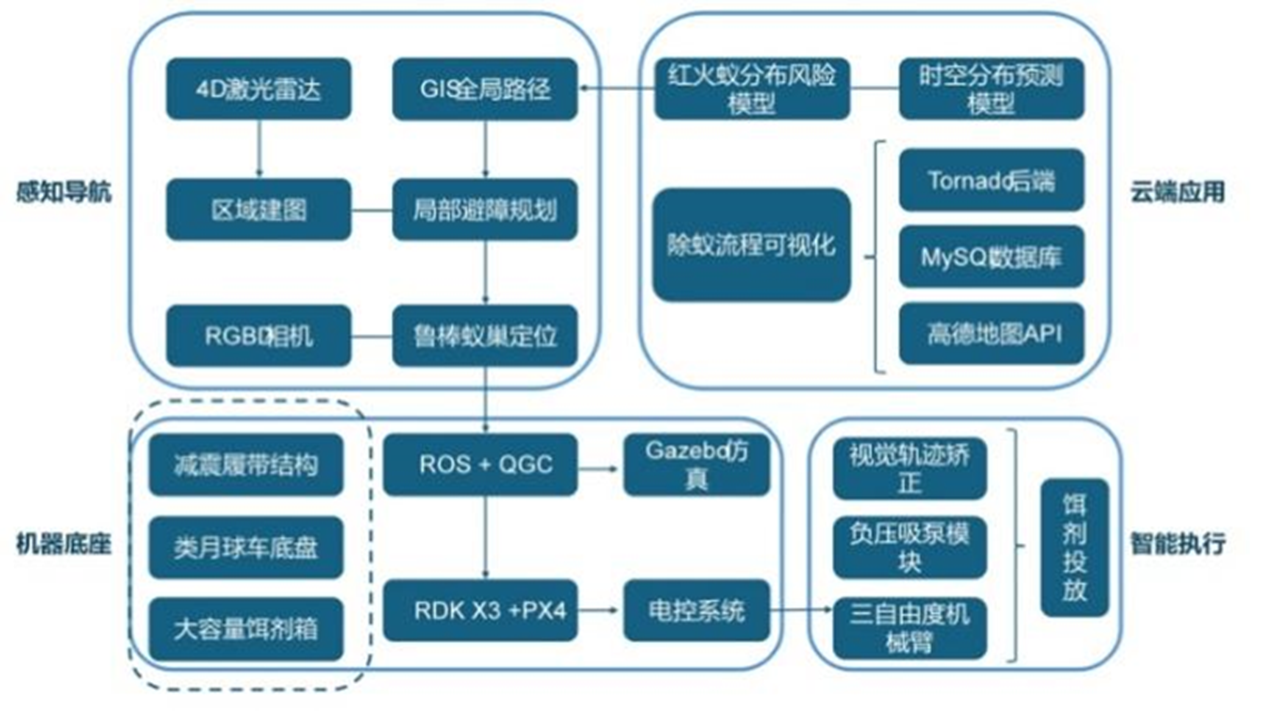
這款AI紅火蟻防治機器人集視覺識別、自主導航、智能投放于一身,像個專業的“除蟻特工”,精準、高效、穩準狠!
- 火眼金睛 :高性能攝像頭+AI視覺,精準鎖定紅火蟻巢穴,探測又快又準!
- 智能導航 :自主規劃路線,LIDAR+IMU傳感器加持,無論是農田、草地還是崎嶇地形,輕松穿越!
- 機械臂投放 :多自由度機械臂+高精度舵機,精準投放餌劑,讓紅火蟻“無處可逃”。
- 履帶底盤 ?:避震+月球車結構,翻山越嶺不在話下,顛簸地形穩得住!
- 云端大腦 ??:數據實時上傳分析,研究紅火蟻動向,優化防治策略,滅蟻更科學!
1.2 創新點
- 懸掛避震系統 :8個避震器,保證機器人“跑得穩,不傷身”。
- 月球車級底盤 :前端采用“被動搖臂”結構,崎嶇路面不減速,穩健行駛無壓力。
- 機械臂+負壓吸泵 :精準吸取餌劑,投放時閉環控制,確保百發百中。
- 智能履帶控制 ?:硬件軟件高度協同,精準巡航,自動調整路線直奔蟻巢。
- YOLO-SRC改良算法 :專門優化移動識別,小小蟻巢也逃不過它的眼睛!
- 餌劑精準投放 :智能控制餌劑用量,確保滅殺率的同時不浪費,每一顆餌劑都物盡其用
二、功能
2.1 功能與特性
- 智能巡航 ?:基于ROS系統,小車可按照用戶設定的全局航點,實時構建3D點云地圖,自主探索、避障、識別紅火蟻巢穴。
- 精準滅殺 :機器人靠近蟻巢后,機械臂+負壓吸泵吸取餌劑,利用視覺識別進行矯正,確保餌劑精準投放,不浪費、不誤傷。
- 生態友好 :餌劑投放量智能控制,既提高滅殺效率,又避免生態污染,不傷害本地蟻種。
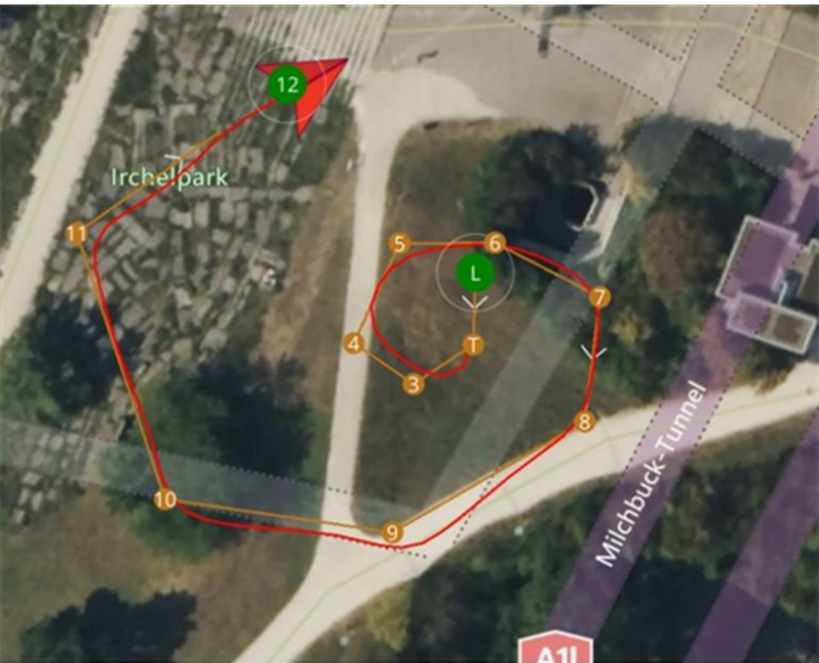
- 遠程監控 :巡邏路徑和滅殺記錄可在Web端 & App端可視化,隨時掌控滅蟻進度!
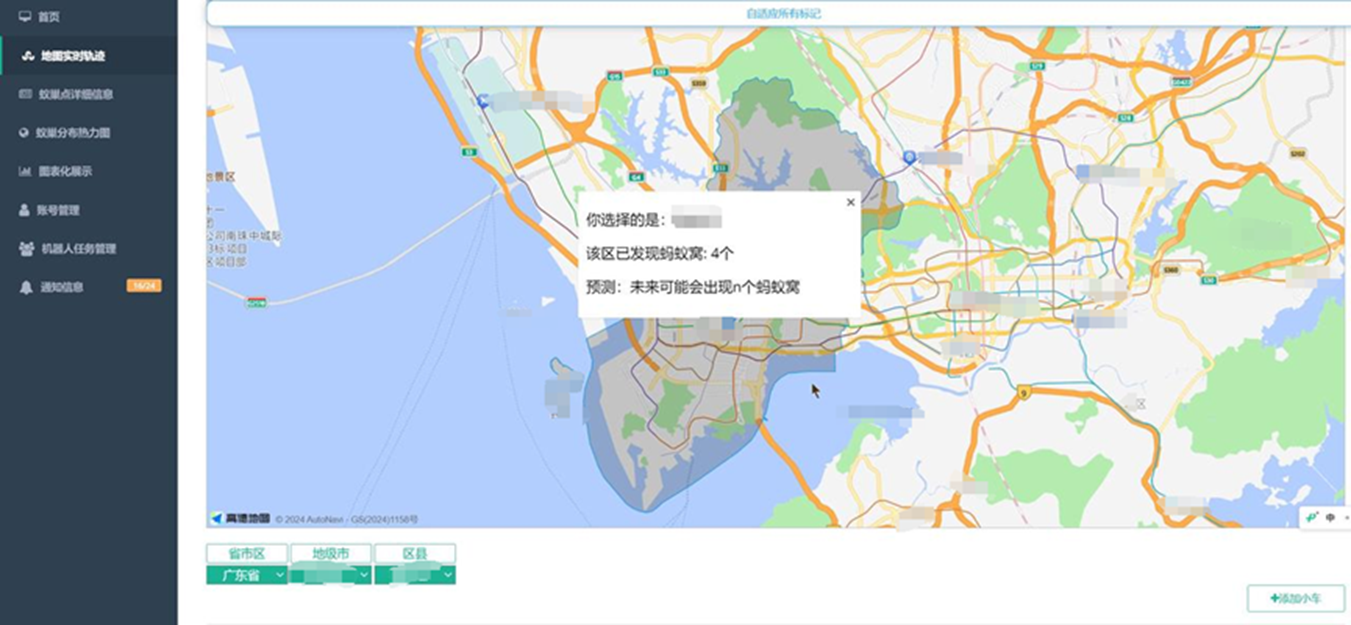
- 智能預測 :云端大模型根據現有數據預測未搜索區域的蟻巢分布,為機器人規劃搜索路線,高效清除隱患。
2.2 設計流程
首先,確定項目背景,強調紅火蟻的危害和現有防治手段的不足。然后,進行需求分析,明確人工巡查和市場產品的局限性。接著,提出機器人設計方案,包括履帶底盤、機械臂和電控系統。履帶底盤采用避震器和月球車機械結構,提升越野性能;機械臂通過高精度舵機和視覺識別實現精確餌劑投放。最后,機器人通過自主導航和云端數據整合,實現高效紅火蟻巢穴探測和滅殺,達到智能化防治的目標。
三、系統實現
3.1總覽
小車可沿預定巡航路線精準滅殺紅火蟻巢穴,也可在劃定的GPS區域內優先覆蓋疫情高風險地區進行搜索滅殺。
滅殺過程:小車依靠機械底座靠近蟻巢,機械臂配合負壓吸泵吸取餌劑,并通過視覺識別和電控系統精準投放,確保滅殺效率,同時降低生態污染,避免對本地蟻種造成破壞。
小車的巡視路徑與滅殺數據將通過Web端和App端可視化展示,同時云端預測模型基于已有蟻巢信息,推測未搜索區域的蟻巢分布,引導小車優化搜索策略。
小車采用“生物防治”理念,打造紅火蟻的“機械天敵”,依靠高識別率、高效搜索和云端數據整合,實現對紅火蟻種群的長期控制,降低其對生態與經濟的影響。
3.2 硬件系統介紹
3.2.1 硬件整體介紹
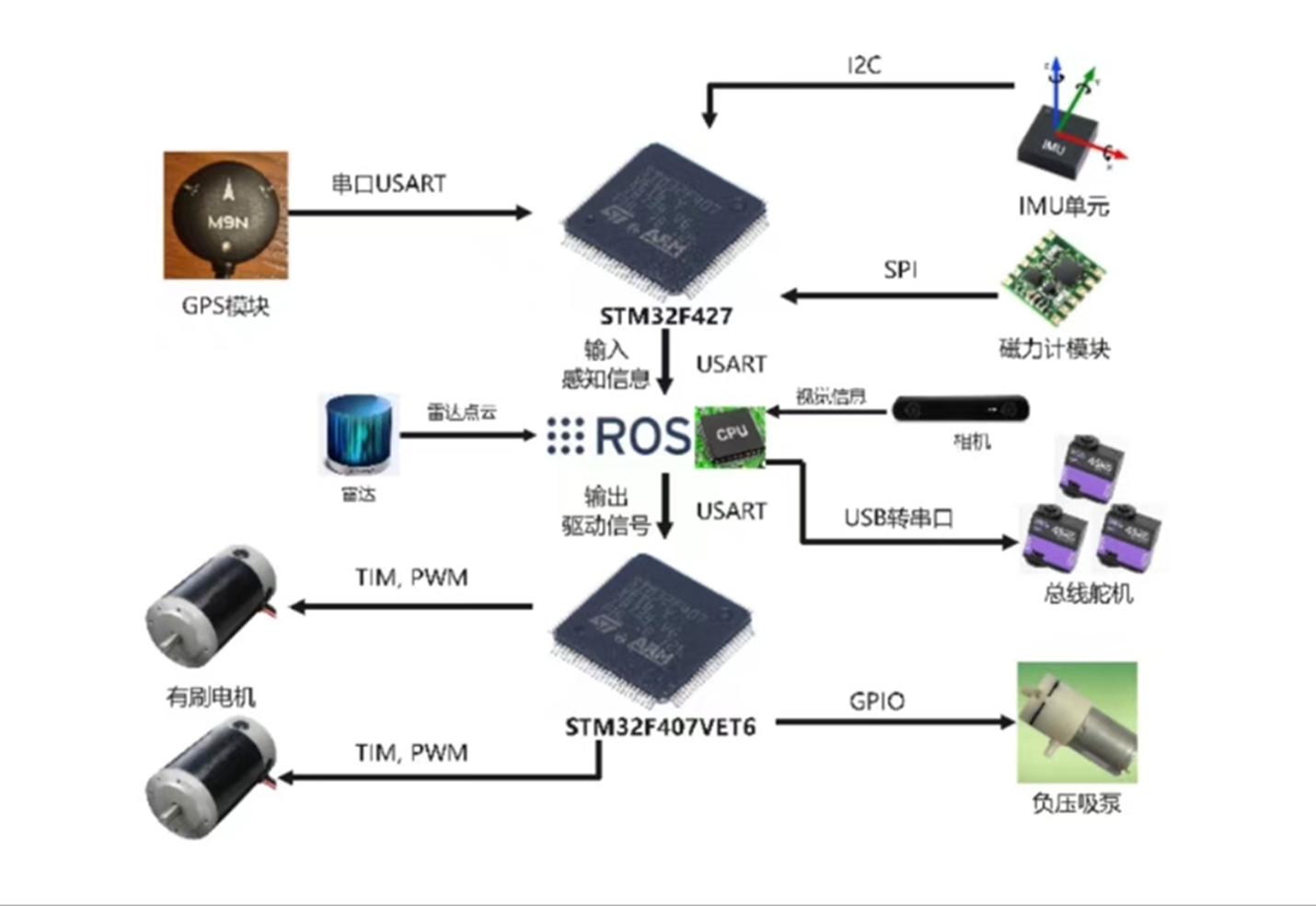
電控系統包括履帶底盤電機的控制與機械臂的控制,執行紅火蟻滅殺任務時,上位機i5主機發送速度信息到下位機,下位機驅動履帶小車機械底座靠近蟻巢,控制機械臂和末端負壓吸泵模塊吸取餌劑,并通過視覺識別矯正使機械臂置于蟻巢上方,而后投放餌劑。
3.2.2 機械設計介紹
A.機器底座
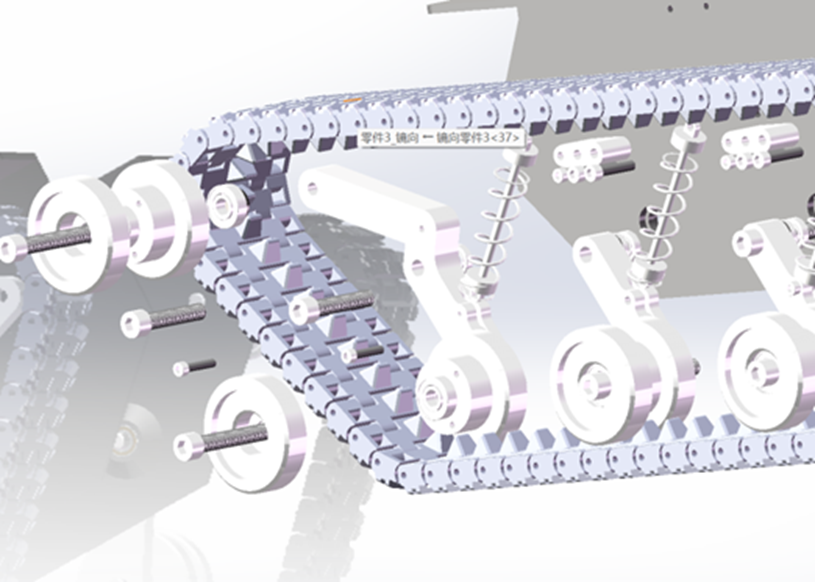
本文的紅火蟻防治機器人采用履帶結構的月球車動力結構,通過電機帶動履帶驅動車體移動。
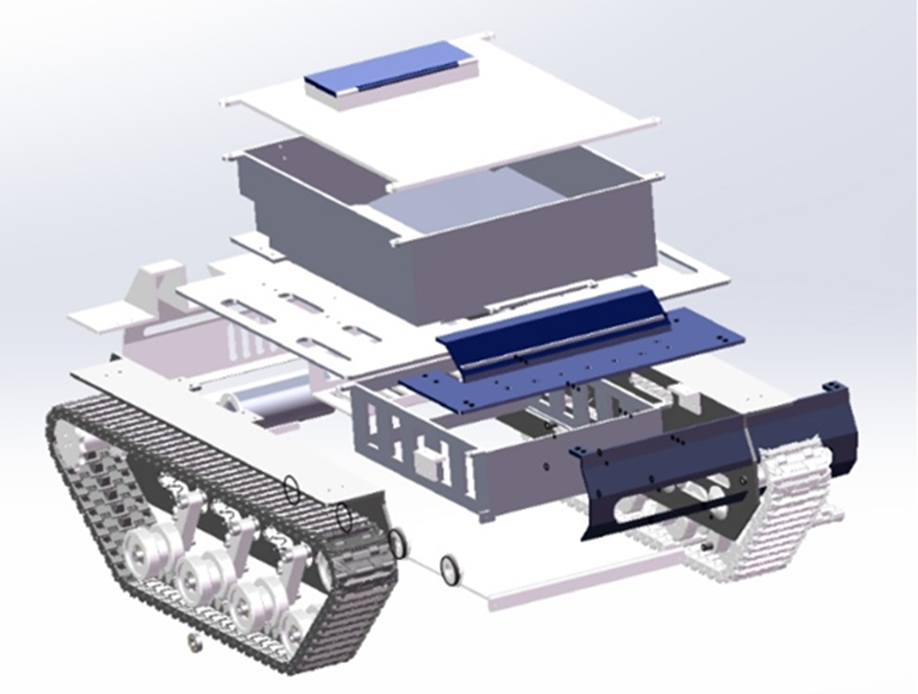
a)避震器系統
我們在底盤上增加了8個避震器,旨在提升車輛的越野性能,并保護車上的設備不受顛簸影響。當遇到不平穩的地面時,從動輪受到向上的壓力,被迫向上移動,并讓車身晃動,而避震器此時就可以給從動輪提供向下的壓力,使從動輪與履帶緊密貼合,履帶與地面緊密接觸,并且這些避震器能夠有效地吸收地面震動,減少車身晃動,提供更穩定的行駛體驗。
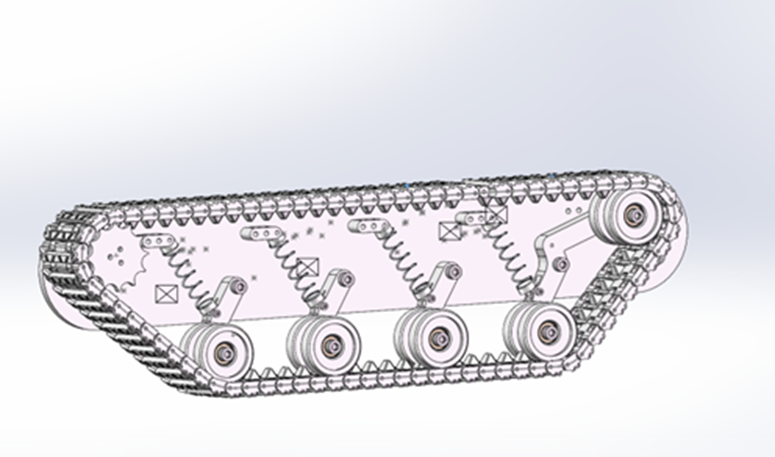
b)類似月球車底盤機械結構
底盤前部兩個從動輪之間采用了類似于月球車的機械結構,即“被動搖臂”型底盤。搖臂固定在連桿構成的懸架上,增強了整體的懸掛性能,使車輛在不平地形中能夠更靈活地行駛。在遇到碎石地帶時,底盤前部會有一定的自主調整性,在允許的范圍內,可以改變履帶與地面的接觸面積,從而增加小車翻越障礙的能力。
c)餌料箱主體設計
采用誘餌箱作為底盤的主體結構,將變壓器和電池放置在箱體下方,以節省空間并保護其免受外部損壞。箱體設計采用了兩邊高中間低的設計,使誘餌粉末能夠集中到中間位置,便于收集和使用。我們設計了有效的固定機制,確保大電池和大電機能夠牢固地固定在底盤上,不會因為顛簸而移位或損壞。
d)強化越野性能的履帶設計
我們針對地形復雜的野外環境,對履帶進行了優化設計,使其更好地適應各種地形。這包括增加了履帶的寬度和厚度,以增加對不平地形的穩定性和抓地力,從而減少小車的側翻概率,提升車輛的越野爬坡能力。
B.機械臂設計
機械臂運動系統是由三個總線舵機、機械外殼組成三自由度機械臂,我們采用了連桿和集中舵機的方式來驅動機械臂,這種方式可以極大的減輕機械臂末端的壓力負荷,并且將重力全部集中在小車底盤上,使得小車重心更穩。機械臂旁會有一個類似卡扣的結構將輸送固體顆粒的軟管給扣緊,在深度相機旁會有一個吸泵,將固體顆粒吸上來并放射出去,深度相機對紅火蟻巢穴進行識別,一旦識別出紅火蟻,上位機通過串口發送轉動位置信息給到總線舵機調試板,總線舵機調試板將接收的信息轉化為 PWM 波驅動舵機進行精準的角度轉動,對準巢穴后,打開吸泵吸起毒藥,電機關閉時倉門打開,農藥落下,殺死紅火蟻。
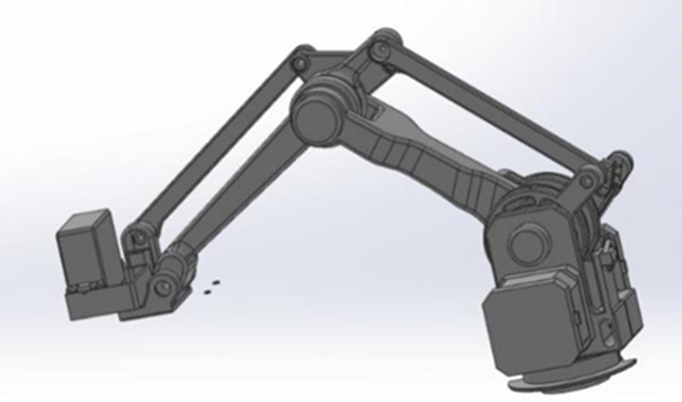
機械臂大體分為三部分,分別是機械臂底部運動模塊,大臂運動模塊,小臂運動模塊。
a)機械臂底部運動模塊:
機械臂整個壓在機械臂底盤固定件,使底部齒輪完美配合,移動盤在邊邊有三個螺紋孔,這三個螺紋孔與螺桿式萬向球配合,他們的位置形成三角形,有效地避免機械臂會因重心不穩而傾斜。在舵機的作用下,齒輪會帶動從動齒輪旋轉,移動盤與舵機在齒輪的帶動下進行旋轉,移動盤中間會有一個軸承,可以極大地減少摩擦并旋轉得更加順利。
b)大臂運動模塊:
一對大臂配合,中間的圓柱孔可以讓紅火蟻餌料輸送管嵌進去,從而避免輸送管暴露和損壞,舵機與大臂配合,可以控制機械臂大體的位置。
c)小臂運動模塊:
一對小臂配合,中間的圓柱孔可以讓紅火蟻餌料輸送管嵌進去,從而避免輸送管暴露和損壞,舵機與曲柄相連,曲柄與連桿相配合,連桿與小臂相配合,舵機運動,可以使曲柄控制連桿,進而讓連桿精準控制小臂的位置,使機械臂末端的達到目標點。
圖9 機械臂設計拆解圖
3.2.3 電路各模塊介紹
下位機采用STM32F407VET6核心板。我們基于STM32F407VET6的拓展板,集成了繼電器模塊。
拓展板的功能主要是用來固定線材,由于在封裝庫中沒有找到合適的型號,所以利用了其他端口來替代,但是焊接的時候依舊是主要采用P2.54的端坐
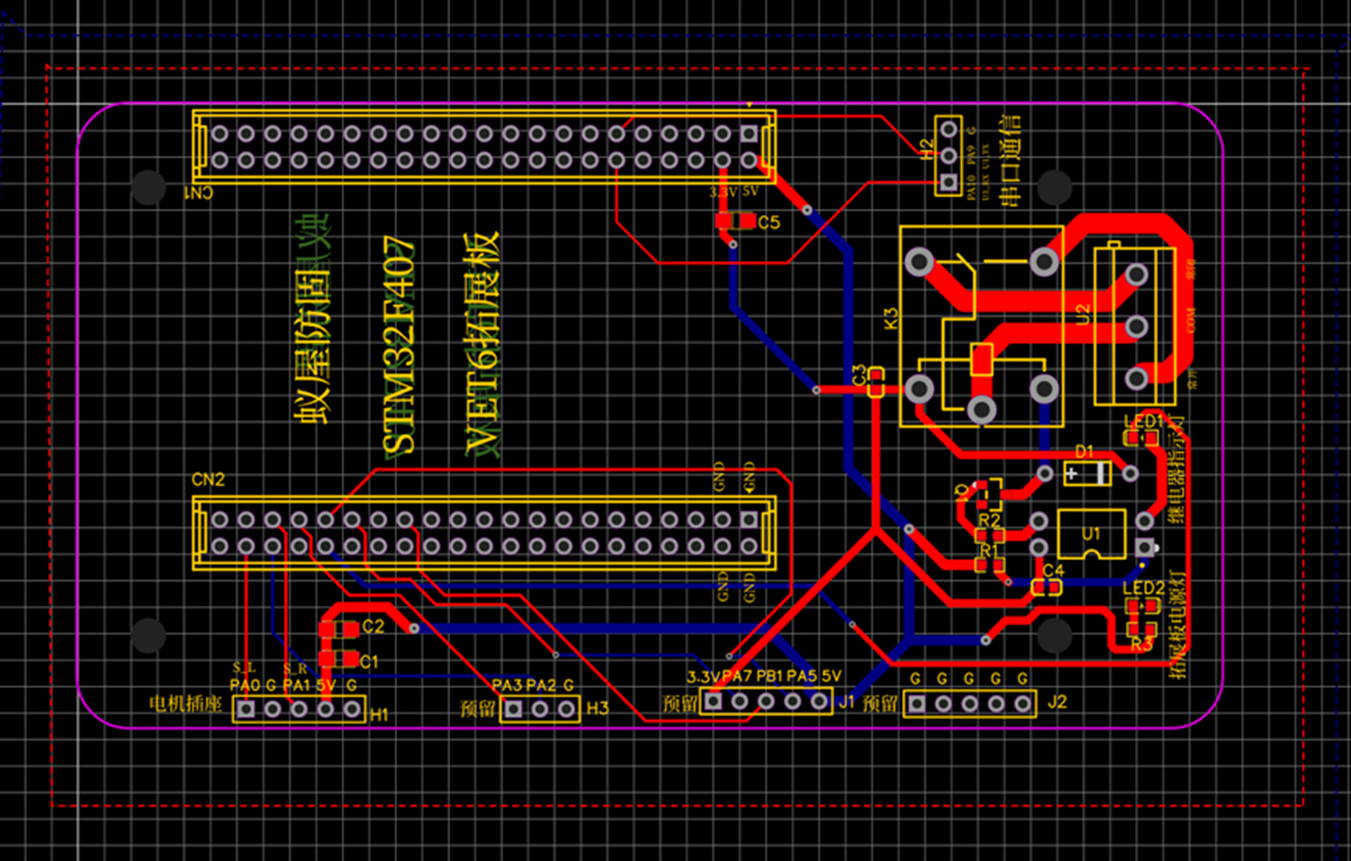
另外的硬件設備:i5主機一臺(主要通過USB轉串口模塊通過串口與下位機通信),一塊RDKx3開發板。
我們以二塊STM32為核心的雙U系統架構,分別負責感知與關節驅動,PX4模塊采用STM32F427 Cortex M4為核心處理器,主要負責感知模塊的驅動與數據的運算,并將處理好的信息上傳CPU處理,STM32F407VET6自定義模塊自主打板,主要負責驅動動力關節。
3.3 導航感知系統介紹
3.3.1整體介紹
導航感知由本地的自主探索導航、手動規劃的大致巡航航點和范圍劃定的風險驅動導航融合構成。
3.3.2 導航感知各模塊介紹(簡化版)
A. SLAM
SLAM(同步定位與地圖構建)用于讓設備在未知環境中同時進行自身定位與環境地圖構建。它通過相機、激光雷達、IMU等傳感器收集環境信息,并利用算法融合這些數據,確定設備位置并生成地圖。
LOAM 是經典的激光 SLAM 算法,主要包含點云特征提取、激光里程計、地圖構建三個模塊。它通過提取點云的邊緣點和平面點進行匹配,實現高效定位與建圖。在此基礎上,LEGO-LOAM 通過地面點分割減少計算量,并引入閉環模塊降低長期漂移。
由于 LOAM 依賴激光雷達掃描,長時間運行后易產生漂移,因此多傳感器融合 SLAM 成為趨勢。IMU 可提供高頻率的角速度與加速度數據,結合 GPS 進行融合,提高系統魯棒性。
主流融合方式有 松耦合(分別處理 IMU 和 LiDAR 數據后融合)和 緊耦合(直接融合 LiDAR 原始特征點與 IMU 數據)。LIO-SAM 采用緊耦合策略,通過 IMU 預積分校正激光點云畸變,并結合 GPS 與閉環檢測,最終實現高精度、低漂移的魯棒定位與建圖。
為了更好地實現定位與建圖效果,我們將ALOAM、LeGO-LOAM與LIO-SAM三種主流SLAM算法進行對比并評估性能。經過實驗,我們發現LIO-SAM算法與前兩者相比,細節更加豐富,同時建圖范圍更廣。ALOAM算法在X軸上擬合較好,但是在Y軸和Z軸上誤差較大。LeGO-LOAM算法在X軸和Y軸上擬合較好,但是在Z軸上嚴重偏離真實軌跡。LIO-SAM算法則在三個方向上擬合效果都優于其他兩種算法,不過波動較大,有可能是受到IMU標定影響,但是曲線趨勢方向大致正確。
最終我們決定采用LIO-SAM算法作為機器人SLAM算法。
B. FAR Planner 自主導航框架(簡化版)
FAR (Fast, Attemptable Route) Planner 是一種實時路徑規劃算法,可根據傳感器數據動態提取環境幾何特征,并構建 Visibility Graph 進行導航。它無需預先構建地圖,可在 1-2ms 內完成 300m 范圍的全局路徑規劃與動態調整。
算法流程:
- 環境建模:將點云轉換為二進制圖像,并使用平均濾波生成模糊圖像。
- 特征提取:從模糊圖像中提取多邊形輪廓,并與傳感器數據匹配。
- 動態避障:通過多幀數據檢測行人、車輛等動態障礙物,并實時更新 V-Graph,當障礙物移開時恢復原有路徑連接。
- 未知環境探索:在無先驗地圖的環境中,FAR Planner 可基于當前信息生成多條可行路徑嘗試,并持續優化導航路線。
這一框架使小車能在復雜環境下進行高效、自主的動態導航。
C. 基于GIS地圖的航點規劃(簡化版)
為提升紅火蟻疫情防治效率,本系統基于 GIS地圖路徑規劃 進行航點優化。云端整合 小車巡視路徑、紅火蟻巢穴信息、歷史疫情數據 等多源數據,利用預測模型估算未搜尋區域的蟻巢分布概率。
航點規劃核心算法 綜合考慮 已知巡視路徑、蟻巢分布、風險等級、用戶優先級 等因素,并結合實時數據 動態調整最優航點。云端生成航點后,通過 物聯網 傳輸至小車,小車接收導航指令后自主巡視。
巡視過程中,小車 實時上傳路徑、蟻巢信息 等數據,云端系統分析后即時調整航點,以適應環境變化,確保巡視策略最優
D. YOLO-SRC視覺目標定位算法(簡化版)
在 過曝、遮擋、運動模糊 等干擾嚴重的戶外環境中,蟻巢檢測面臨挑戰。我們開發的 YOLO-SRC 算法基于 YOLOv4 改進,結合 合成噪聲數據 與 對比學習一致性對齊 訓練方法,提高了蟻巢檢測的魯棒性與準確性。
核心優化點:
- 特征提取網絡優化 —— 增強微小目標特征捕捉,提高識別精度。
- 多尺度特征融合 —— 融合不同層級特征,提升檢測性能。
- 數據增強與對齊訓練 —— 通過 JSD散度損失 使模型在不同噪聲域下預測對齊,增強抗干擾能力。
目標定位流程:
- RGBD雙目相機 采集圖像,YOLO-SRC輸出目標檢測框。
- 對齊Depth圖,利用均值濾波去噪,獲取目標中心深度。
- 矩陣映射 將像素坐標轉換為 機器人坐標系,實現 蟻巢空間位姿估計。
3.4.2 軟件各模塊介紹
后端設計介紹:
使用 Tornado 框架處理高并發和長連接請求,負責數據交互和 API 接口提供,功能模塊包括:
- 軌跡展示處理器:讀取機器人運行軌跡數據(經緯度),通過高德地圖API在前端展示。
- 標記點處理器:處理紅火蟻巢標記點的操作,包括添加、更新和獲取標記點數據。
- 區域選擇處理器:查詢并返回用戶選擇區域內的紅火蟻巢數量。
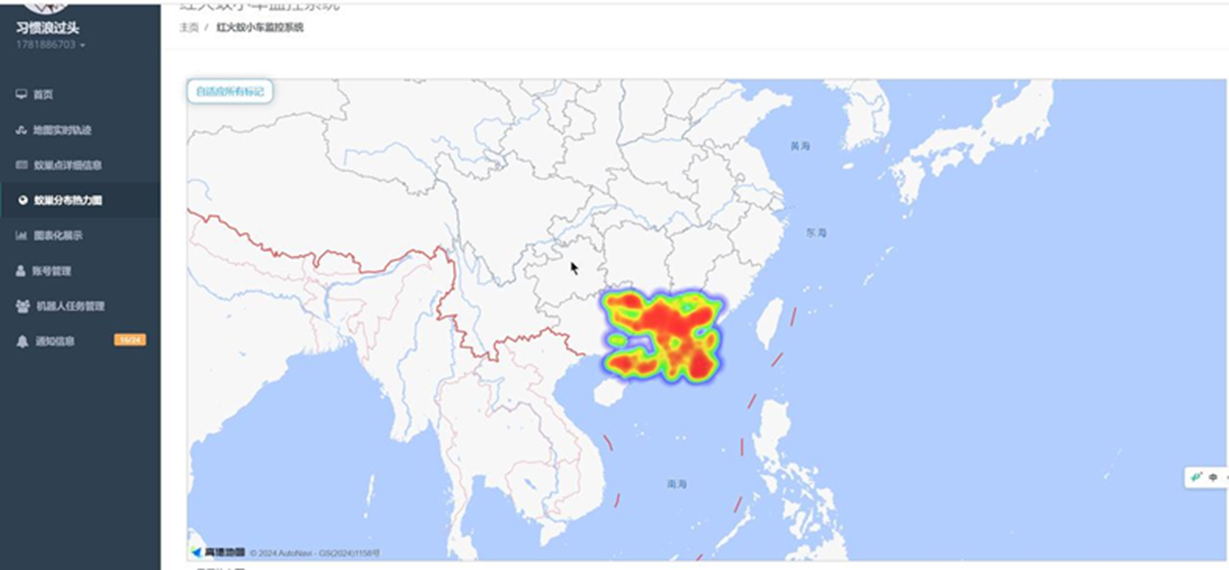
- 熱力圖處理器:返回紅火蟻巢位置數據,前端生成熱力圖展示。
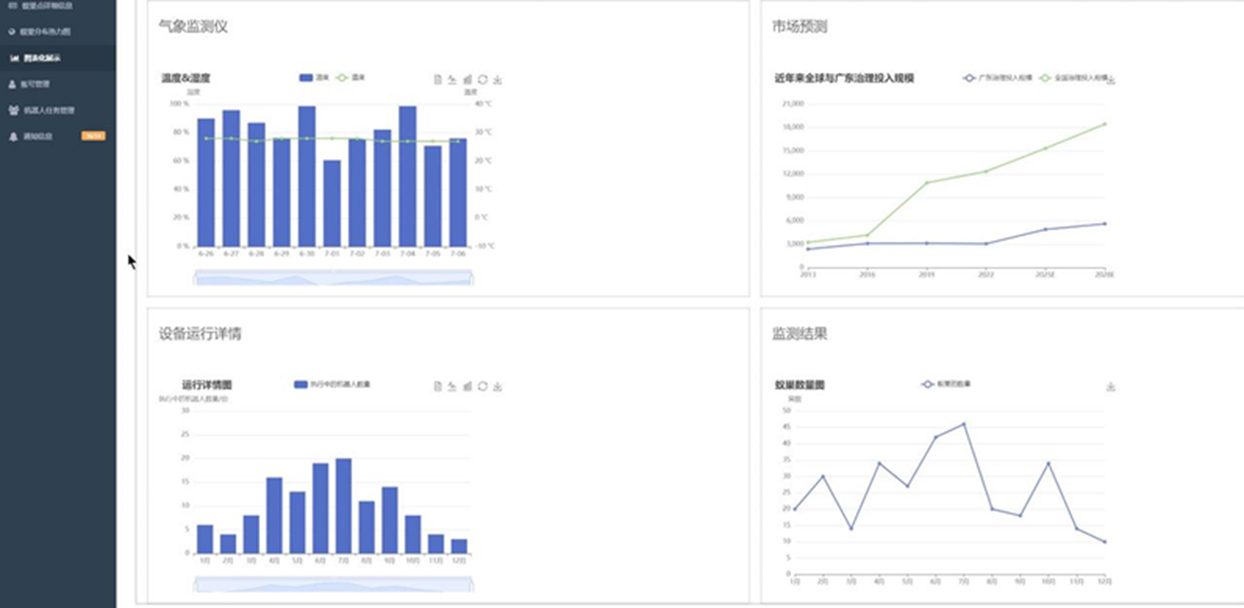
- 圖表可視化處理器:處理天氣、機器人狀態、溫濕度及蟻巢統計數據,生成圖表進行展示。
- 登錄登出功能及攔截器:負責用戶認證、會話管理和權限控制,確保系統安全。
前端設計介紹:
前端使用 高德地圖API 實現機器人軌跡、紅火蟻巢標記和熱力圖的可視化,功能模塊包括:
- 軌跡展示:在高德地圖上展示機器人軌跡,通過經緯度描點成線,并提供軌跡的顯示與隱藏控制功能。
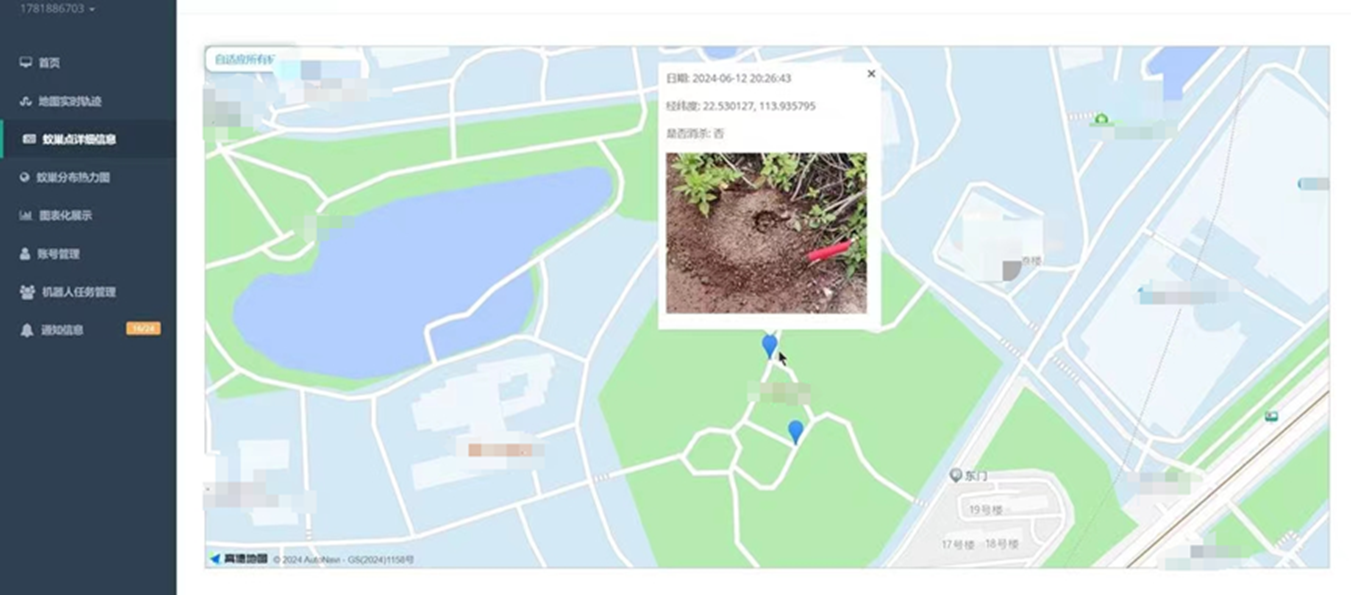
- 標記點展示:在地圖上標記紅火蟻巢位置,點擊標記點顯示詳細信息(照片、經緯度、發現時間等)。
- 區域選擇:用戶可以選擇特定區域,系統查詢該區域內所有紅火蟻巢數量,并在地圖上進行展示。
- 熱力圖:生成紅火蟻巢分布的熱力圖,顯示蟻巢密位置分布以及密度情況,蟻巢越密集,顏色越深。
- 圖表可視化:展示未來天氣預報、機器人運行狀態、溫濕度及紅火蟻巢統計信息的圖表。
五、性能一覽
1 部分機械結構采用PLA材料打印,部分機械結構采用pla-CF材料打印。打印密度均大于80%。
2. 殺蟻餌料載重達40kg
3 機器人巡航續航達4小時
4 最高速度1m/s
5 視覺識別精準,高達92%以上
指導老師:張博

深圳大學機電與控制工程學院研究員,博士生導師,深圳市高層次人才,現任人工智能與數字經濟廣東省實驗室(深圳)主任助理,深圳市自主無人系統與智能操作聯合實驗室主任。主要從事的科研方向包括:空間智能、自主智能、具身智能與智能無人系統及其應用。歷任深圳大學機電與控制工程學院自動化系主任,學科辦公室副主任,機器人工程專業負責人。兼任《Energy Review》青年編輯,TIE、TIC、ISA、IET、Sensors、Journal of the Franklin Institute等期刊審稿人。作為項目負責人主持國家級項目8項,省市級項目3項。以第一/通訊作者發表論文20余篇,其中TOP期刊論文4篇,出版專著 1 部,授權專利20余項。
-
AI
+關注
關注
87文章
34000瀏覽量
275028 -
人工智能
+關注
關注
1804文章
48599瀏覽量
245941 -
RDK
+關注
關注
0文章
24瀏覽量
9163
發布評論請先 登錄
蟻群算法基本原理及其應用實例
NHLERE:應用蟻群算法的WSN路由算法
TSP問題蟻群算法通用MATLAB源程序
有沒有蟻群算法的matlab編程代碼
蟻群算法參數優化
小蟻LITE運動相機評測 超高性價比
人工智能芯片新發展,小蟻科技賦能邊緣計算
蟻群算法的代碼和講解免費下載





 工商網監
工商網監
評論