 EtherCAT轉EtherNet/IP實現工控機與機器人設備通訊的配置案例
EtherCAT轉EtherNet/IP實現工控機與機器人設備通訊的配置案例

一、案例背景
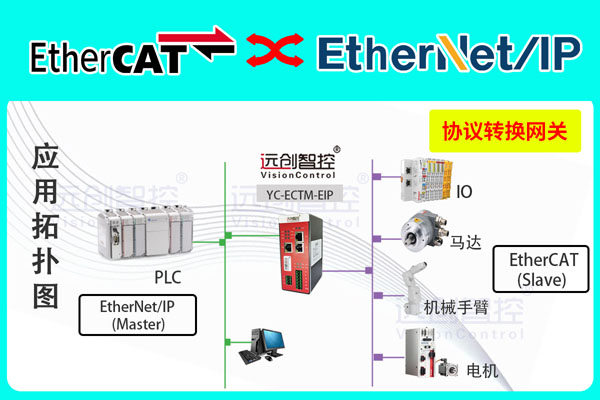
在錢江機器人公司的生產場景中,機器人控制柜配件刀片式IO板的應用面臨著特殊的技術挑戰。現場工控機采用EtherNet/IP通信協議,而刀片式IO板作為從站設備,需要通過EtherCAT網絡進行連接。然而,工程師們在開發EtherCAT主站部分時面臨時間緊迫的問題,難以自主完成相關開發工作。 為了解決這一難題,錢江機器人公司的技術團隊開始在市場上廣泛尋找合適的解決方案。他們對市面上眾多產品的技術參數進行了詳細分析,包括數據傳輸速率、兼容性、支持的設備類型等關鍵指標。同時,他們也高度重視售后服務的質量,評估供應商能否提供及時、專業的技術支持。穩定性更是重中之重,畢竟在工業生產環境中,設備的穩定運行直接關系到生產效率和產品質量。 經過多輪嚴謹的篩選與比對,最終捷米特品牌的JM-ECTM-EIP網關模塊脫穎而出。這款網關屬于EtherCAT主站網關,能夠完美實現EtherNet/IP到EtherCAT的協議轉換。它作為EtherNet/IP與EtherCAT之間的橋梁,使得工控機能夠順利與IO板、驅動器等從站設備進行通信。通過使用該網關,錢江機器人公司不僅節省了大量的開發時間和人力成本,還確保了整個系統的穩定運行,為生產的高效開展提供了有力保障。
二、硬件設備
·工控機:支持標準的EtherNet/IP協議
·機器人EtherCAT IO板:支持標準的EtherCAT協議
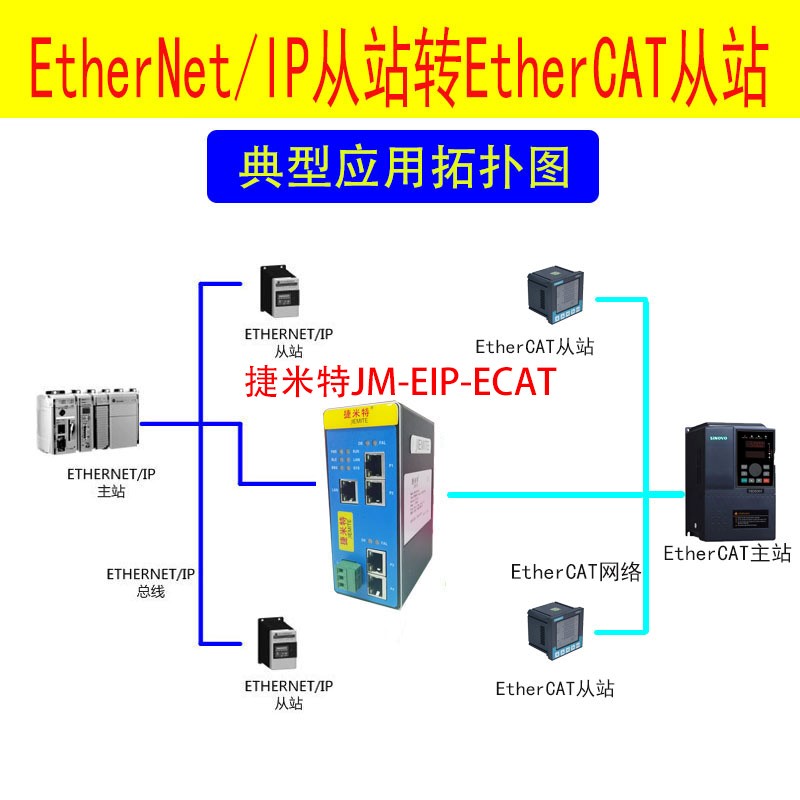
·捷米特JM-ECTM-EIP協議網關:實現EtherNet/IP網絡與EtherCAT網絡之間的數據通訊,即EtherNet/IP和EtherCAT網絡之間無縫內部連接。該網關可實現雙向數據交換,既允許現有的、低成本的EtherCAT設備集成到EtherNet/IP

三、技術指標
?ECTM-EIP在EtherNet/IP一側為EtherNet/IP從站,在EtherCAT一側為EtherCAT主站;
?EtherCAT最多支持500個字節
?支持DC-Synchronous、SM Synchronous模式
?支持拓撲查看器、診斷檢測、自動掃描
?支持EtherNet/IP協議;
?支持最大的輸入字節數為1500字節,最大的輸出字節為1500字節;
?供電:24VDC(±5%),最大功率3.5W ;
?防護等級:IP20;

四、設備連接及配置過程:
1. 配置 EtherCAT 側參數
·設置從站信息:在軟件中添加IO板設備的從站信息,根據IO板設備的型號和規格,導入相應的設備描述文件(EDS文件)。
·配置通信參數:設置EtherCAT網絡的通信速率、周期時間等參數,確保與IO板設備的通信要求相匹配。例如,將通信速率設置為100Mbps,周期時間設置為 1ms。
2. 配置 EtherNet/IP 側參數
·設置 IP 地址:為協議轉換網關的 EtherNet/IP端口分配一個與工控機在同一網段的 IP 地址,如 192.168.0.100,子網掩碼設置為 255.255.255.0。
·配置連接參數:設置 EtherNet/IP 的連接類型、連接超時時間等參數。例如,將連接類型設置為顯式連接,連接超時時間設置為 500ms。
·雙擊
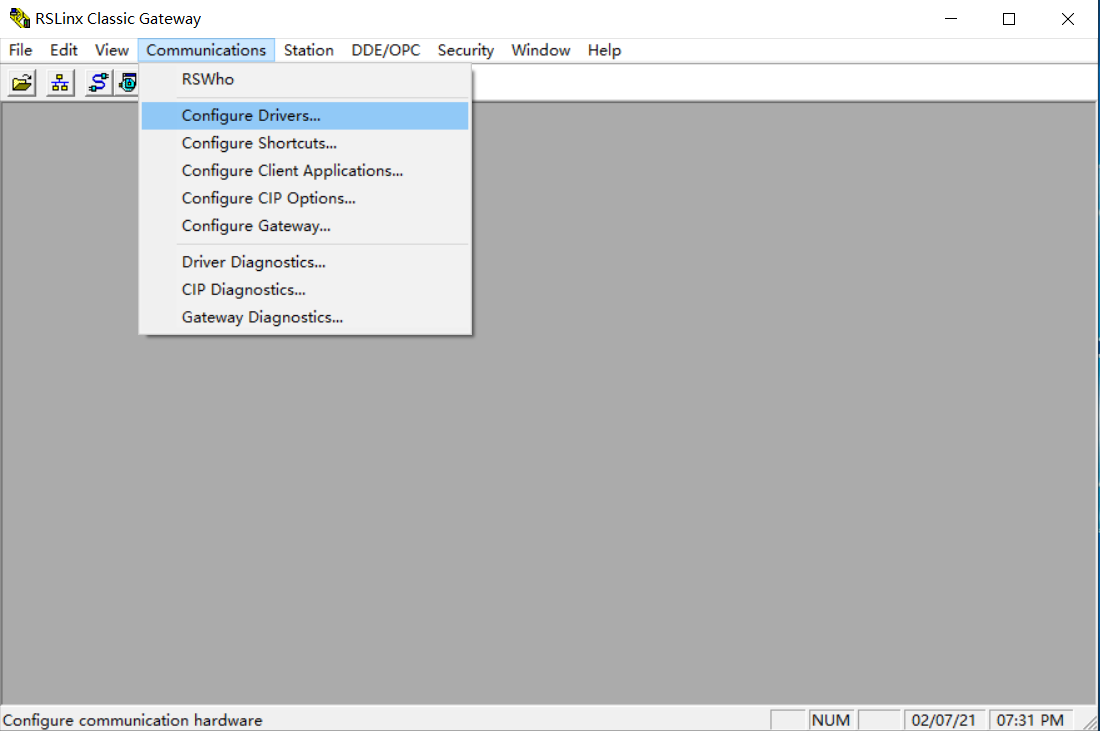
圖標,打開軟件,在RSLinx軟件中配置通訊驅動程序,從 “Communications”(通訊)下拉菜單中選擇“ConfigureDrivers”(配置驅動程序),將出現“ConfigureDrivers”對話框(在添加新驅動程序之前,確認滿足以下條件:工作站正確配置工作站的IP地址和其他網絡參數,正確連接到EtherNet/IP網絡);
·
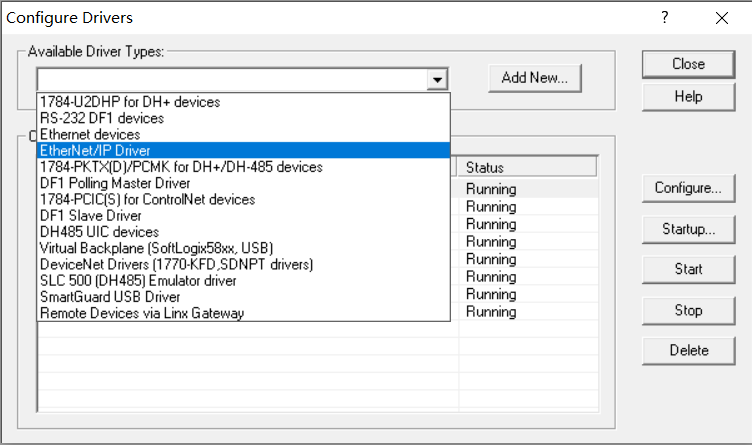
·從“AvailableDriverTypes”(可用的驅動程序類型)下拉菜單中選擇“EtherNet/IP Driver”(EtherNet/IP驅動程序)或者“Ethernetdevices”(以太網設備),然后點擊“AddNew…”(新加);
·
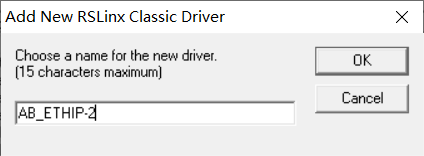
·將顯示“ AddNewRSLinxClassicDriver”(添加新RSLinxClassic驅動程序)對話框;可以修改新的驅動程序名稱,此例子接受缺省名字(AB_ETHIP-2)然后單擊OK;
·
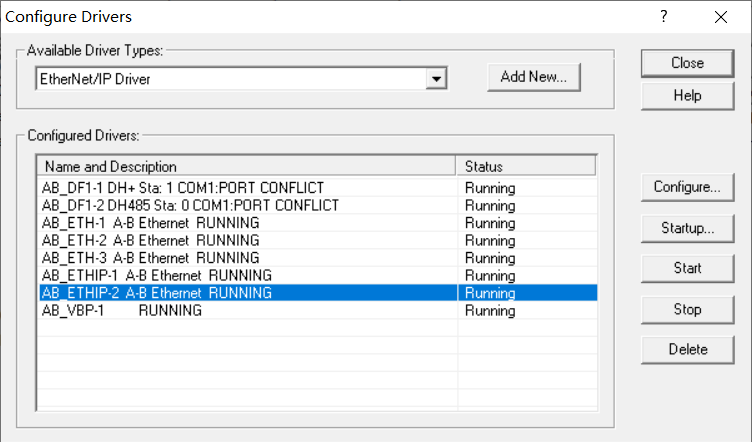
·新的驅動程序AB ETHIP - 2 A-B EthernetRUNNING在ConfiguredDrivers列表里,如下圖,點擊Close;
·
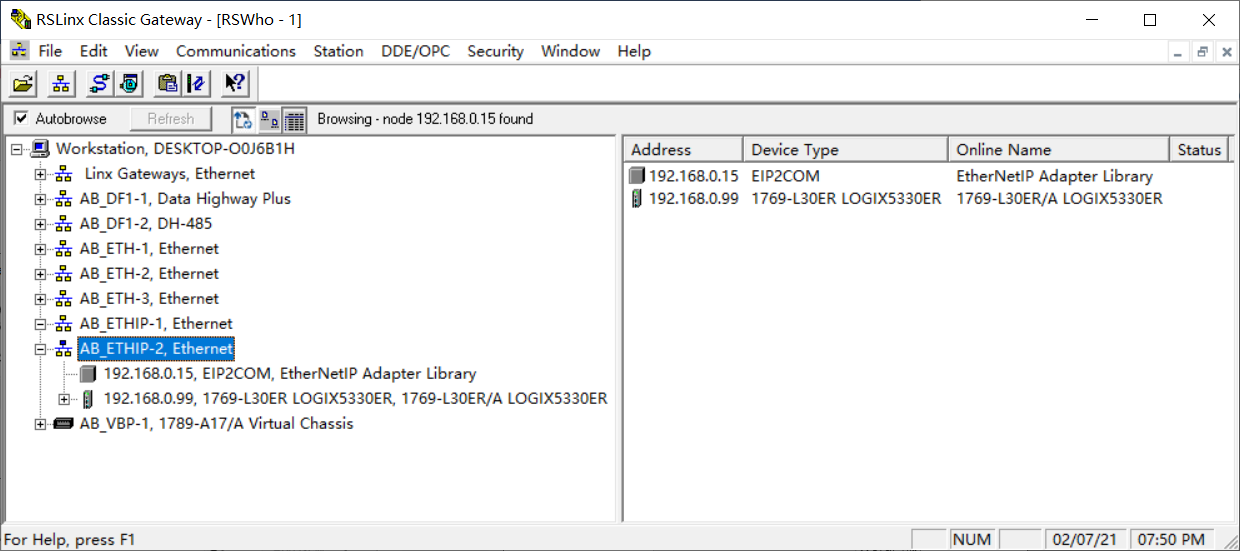
·點擊Communication下拉菜單的RSWho或者點擊RSWho圖標

,彈出RSWho對話框,顯示控制網絡的樹狀瀏覽畫面,雙擊AB_ETHIP-2,Ethetnet驗證剛才配置的AB_ETHIP驅動能否與Logix控制器或者網關設備進行通訊;(如果有設備的通訊狀態出錯,例如一個被認可的設備被拔掉,設備顯示帶紅色X,表明RSWho原先認可,但現在無法找到);
·
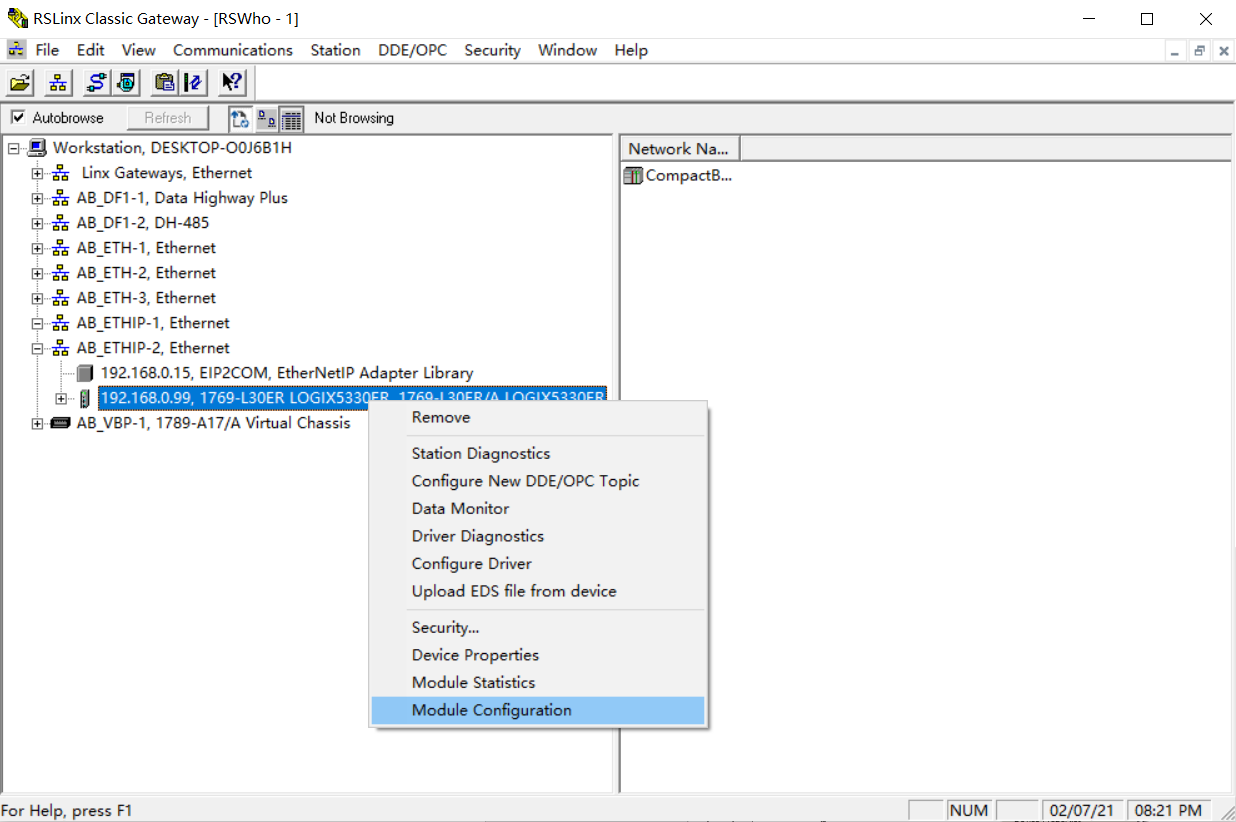
·可使用RSLinx軟件(或者Studio5000)修改通訊模塊的IP地址,右擊EtherNet/IP模塊,選擇ModuleConfiguration(模塊配置)
·
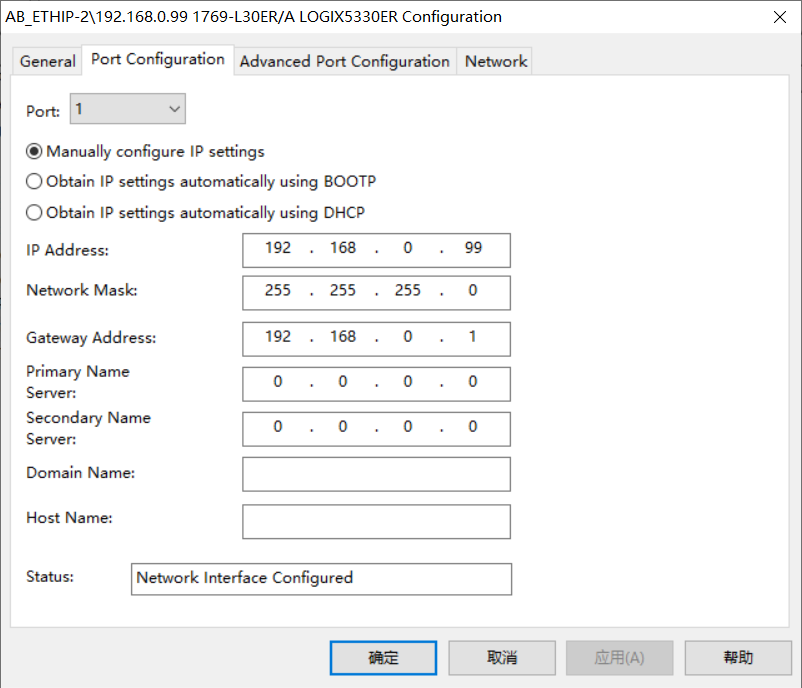
·單擊PortConfiguration(串口配置)選項卡,修改完成后點擊確認;
·
5. 數據映射
在網關配置軟件中進行數據映射,將EtherCAT側IO板設備的輸入輸出數據映射到 EtherNet/IP 側的相應數據區域。例如,將IO板設備的第1-8個數字輸入信號映射到EtherNet/IP的輸入寄存器0--7 中。
6. 保存配置
完成所有參數配置和數據映射后,保存配置并將其下載到協議轉換網關中。
五、系統測試
1.啟動所有設備,包括工控機、協議轉換網關和 IO 板設備。
2.在工控機的控制軟件中,查看監控界面上的數據顯示是否正常。通過手動操作 IO 板設備的輸入信號,觀察監控界面上的指示燈是否相應變化。
3.在控制軟件中發送控制指令,檢查 IO 板設備的輸出是否按照指令進行動作。例如,發送一個輸出信號使IO板設備的某個繼電器閉合,觀察繼電器的實際狀態。
4.如果在測試過程中出現通信故障或數據異常,檢查設備的連接是否正常,網關和工控機的配置參數是否正確,排查網絡故障等問題。
(具體內容配置過程及其他相關咨詢可聯系楊工。)
審核編輯 黃宇
-
機器人
+關注
關注
213文章
29463瀏覽量
211456 -
工控機
+關注
關注
10文章
1852瀏覽量
51506 -
ethercat
+關注
關注
19文章
992瀏覽量
39604
發布評論請先 登錄
探尋西門子PLC與川崎機器人利用 Ethernet IP 轉 Profinet網關實現通訊的成功案例

Modbus轉Profinet網關:工控機的“逆襲神器”
EtherNet IP轉Profinet網關連接FANUC機器人配置指南(PROFIENT組態篇)

開疆智能Profinet轉EthernetIP從網關連接ABB機器人做EtherNet主配置案例
西門子 PLC 與川崎機器人通訊:Profinet 轉 Ethernet IP 實例解析
工控機怎么編程?工控機是如何控制設備的?
EtherCAT轉EtherNet/IP協議網關(JM-EIP-ECAT)

EtherNet/IP轉DeviceNet協議網關(EtherNet/IP轉DeviceNet)

Profinet轉EtherNet/IP主站協議網關(Profinet轉EtherNet/IP)

EtherCAT轉EtherNet/IP主站協議網關(EtherCAT轉EtherNet/IP)

EtherCAT主站轉EtherNet/IP協議網關(EtherNet/IP轉EtherCAT)
EtherCAT從站轉EtherNet/IP從站協議網關(JM-EIP-ECAT)

EtherNet/IP轉EtherCAT協議轉換網關模塊配置
Modbus轉Ethernet IP網關模塊與匯川PLC通訊案例

Modbus轉Ethernet/IP網關模塊與匯川PLC通訊在網關配置軟件中的配置






 工商網監
工商網監
評論