 迅為RK3568開發板SPI驅動指南-mcp2515驅動編寫:讀寄存器函數
迅為RK3568開發板SPI驅動指南-mcp2515驅動編寫:讀寄存器函數
迅為RK3568開發板SPI驅動指南-mcp2515驅動編寫:讀寄存器函數
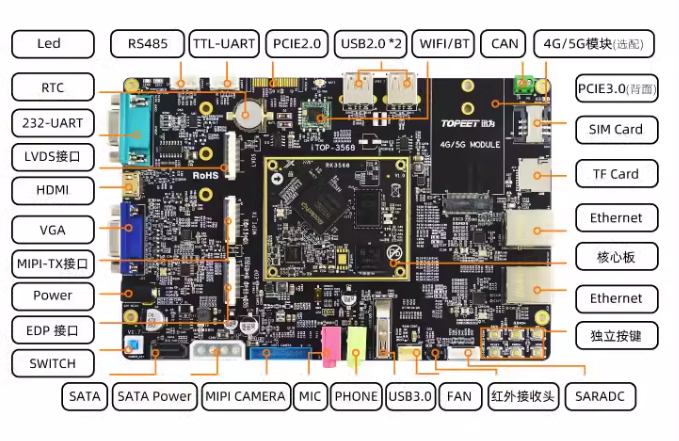
瑞芯微RK3568芯片是一款定位中高端的通用型SOC,采用22nm制程工藝,搭載一顆四核Cortex-A55處理器和Mali G52 2EE圖形處理器。RK3568支持4K解碼和1080P編碼,支持SATA/PCIE/USB3.0外圍接口。RK3568內置獨立NPU,可用于輕量級人工智能應用。RK3568支持安卓11和linux系統,主要面向物聯網網關、NVR存儲、工控平板、工業檢測、工控盒、卡拉OK、云終端、車載中控等行業。
?
【公眾號】迅為電子
在上個章節中編寫了mcp2515的復位函數,但并不能判定mcp2515進入了復位狀態,而在本章節將編寫mcp2515的讀寄存器函數,通過讀取mcp2515 CAN狀態寄存器的值,來確定當前SPI轉CAN模塊所處的工作模式。
189.1理論分析
mcp2515 CAN狀態寄存器相關描述如下圖所示:
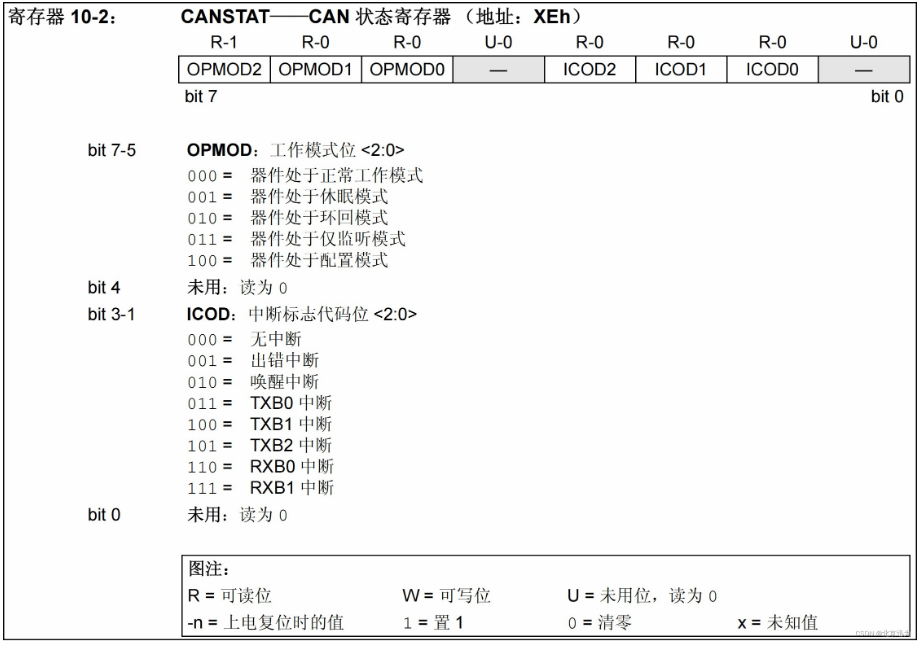
從上圖可知,can狀態寄存器的地址是0x0e,可以通過高三位來判斷mcp2515芯片所處的模式,整理之后的匹配圖如下所示:
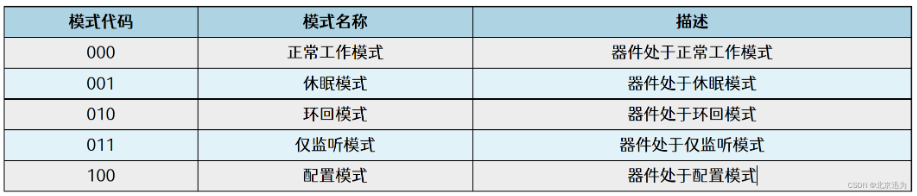
當bit7-5位是0x0100時,就說明MCP2525處于配置模式下,在講解復位函數的編寫中提到MCP2515提供了一系列的SPI指令,通過向MCP2515發送SPI指令就可以完成復位、讀、寫等操作,具體的SPI指令表如下圖所示:
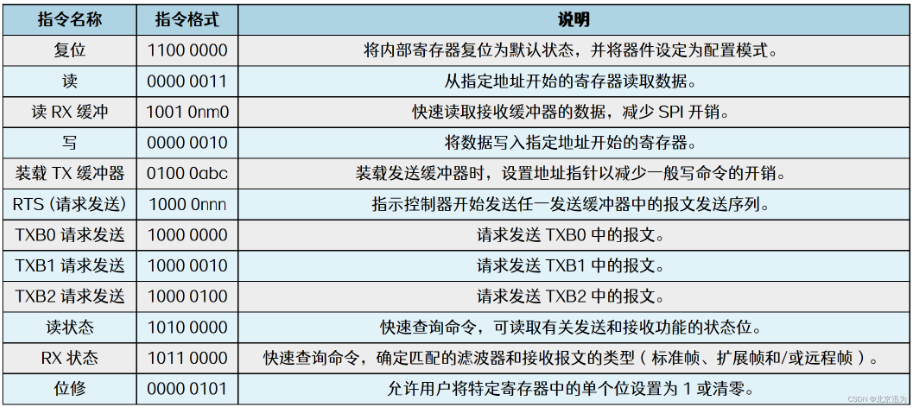
根據SPI指令表可以得到讀指令對應的指令格式為00000011,轉換為16進制為0x03,所以只需要先向MCP2515寫入0x03,然后就可以讀取指定地址的寄存器數據了,編寫讀寄存器函數可以用到上一章講解的先寫后讀spi_write_then_read函數,具體內容如下所示:
char mcp2515_read_reg(char reg) {
char write_buf[] = {0x03, reg}; // SPI寫緩沖區寫入SPI讀指令0x03
char read_buf; // SPI讀緩沖區
int ret;
ret = spi_write_then_read(spi_dev, write_buf, sizeof(write_buf), &read_buf, sizeof(read_buf)); //調用SPI寫讀函數
if (ret < 0) {
printk("spi_write_then_read error\n");
return ret;
}
return read_buf;
}
至此,關于MCP2515讀寄存器函數就編寫完成了,在下個小節將編寫完整的驅動程序,對這兩章填充的復位函數和都寄存器函數進行驗證。
189.2驅動程序編寫
本實驗驅動對應的網盤路徑為:iTOP-3568開發板\03_【iTOP-RK3568開發板】指南教程\02_Linux驅動配套資料\04_Linux驅動程序\116_mcp2515_04\。
本實驗將以187章編寫完成的驅動程序為基礎,添加了188章完善的復位函數以及上一小節填充的讀寄存器函數,并在probe函數中對兩個函數進行調用,從而驗證兩個函數編寫的正確性。編寫完成的mcp2515.c代碼如下所示:
#include
#include
#include
#include
#include
#include
dev_t dev_num; //設備號
struct cdev mcp2515_cdev; //字符設備結構體
struct class *mcp2515_class; //設備類
struct device *mcp2515_device; //設備
struct spi_device *spi_dev; // SPI設備指針
// MCP2515芯片復位函數
void mcp2515_reset(void){
int ret;
char write_buf[] = {0xc0}; //復位指令0x11000000即0xc0
ret = spi_write(spi_dev, write_buf, sizeof(write_buf)); //發送復位命令
if(ret < 0){
printk("spi_write is error\n"); //打印錯誤信息
}
}
// MCP2515讀寄存器函數
char mcp2515_read_reg(char reg) {
char write_buf[] = {0x03, reg}; // SPI寫緩沖區寫入SPI讀指令0x03
char read_buf; // SPI讀緩沖區
int ret;
ret = spi_write_then_read(spi_dev, write_buf, sizeof(write_buf), &read_buf, sizeof(read_buf)); //調用SPI寫讀函數
if (ret < 0) {
printk("spi_write_then_read error\n");
return ret;
}
return read_buf;
}
//打開設備文件的回調函數
int mcp2515_open(struct inode *inode, struct file *file) {
return 0; //返回成功
}
//讀取設備文件的回調函數
ssize_t mcp2515_read(struct file *file, char __user *buf, size_t size, loff_t *offset) {
return 0; //返回成功
}
//寫入設備文件的回調函數
ssize_t mcp2515_write(struct file *file, const char __user *buf, size_t size, loff_t *offset) {
return 0; //返回成功
}
//關閉設備文件的回調函數
int mcp2515_release(struct inode *inode, struct file *file) {
return 0; //返回成功
}
//設備文件操作集合
struct file_operations mcp2515_fops = {
.open = mcp2515_open,
.read = mcp2515_read,
.write = mcp2515_write,
.release = mcp2515_release,
};
// MCP2515設備初始化函數
int mcp2515_probe(struct spi_device *spi) {
int ret, value;
printk("This is mcp2515_probe\n");
spi_dev = spi; //保存SPI設備指針
//分配字符設備號
ret = alloc_chrdev_region(&dev_num, 0, 1, "mcp2515");
if (ret < 0) {
printk("alloc_chrdev_region error\n");
}
//初始化字符設備
cdev_init(&mcp2515_cdev, &mcp2515_fops);
mcp2515_cdev.owner = THIS_MODULE;
//添加字符設備
ret = cdev_add(&mcp2515_cdev, dev_num, 1);
if (ret < 0) {
printk("cdev_add error\n");
return -1;
}
//創建設備類
mcp2515_class = class_create(THIS_MODULE, "spi_to_can");
if (IS_ERR(mcp2515_class)) {
printk("mcp2515_class error\n");
return PTR_ERR(mcp2515_class);
}
//創建設備
mcp2515_device = device_create(mcp2515_class, NULL, dev_num, NULL, "mcp2515");
if (IS_ERR(mcp2515_device)) {
printk("mcp2515_device error\n");
return PTR_ERR(mcp2515_device);
}
mcp2515_reset(); //復位MCP2515設備
value = mcp2515_read_reg(0x0e); //讀取寄存器值
printk("value is %x\n", value); //打印讀取的值
return 0; //返回成功
}
// MCP2515 SPI設備的移除函數
static int mcp2515_remove(struct spi_device *spi) {
device_destroy(mcp2515_class, dev_num);
class_destroy(mcp2515_class);
cdev_del(&mcp2515_cdev);
unregister_chrdev_region(dev_num, 1);
return 0;
}
// MCP2515設備匹配表,用于設備樹匹配
static const struct of_device_id mcp2515_of_match_table[] = {
{ .compatible = "my-mcp2515" },
{}
};
// MCP2515設備ID匹配表,用于總線匹配
static const struct spi_device_id mcp2515_id_table[] = {
{ "mcp2515", 0 },
{}
};
// MCP2515 SPI驅動結構體
static struct spi_driver spi_mcp2515 = {
.probe = mcp2515_probe, //探測函數
.remove = mcp2515_remove, //移除函數
.driver = {
.name = "mcp2515", //驅動名稱
.owner = THIS_MODULE, //所屬模塊
.of_match_table = mcp2515_of_match_table, //設備樹匹配表
},
.id_table = mcp2515_id_table, //設備ID匹配表
};
//驅動初始化函數
static int __init mcp2515_init(void)
{
int ret;
//注冊SPI驅動
ret = spi_register_driver(&spi_mcp2515);
if (ret < 0) {
//注冊失敗,打印錯誤信息
printk("spi_register_driver error\n");
return ret;
}
return ret;
}
//驅動退出函數
static void __exit mcp2515_exit(void)
{
//注銷SPI驅動
spi_unregister_driver(&spi_mcp2515);
}
module_init(mcp2515_init);
module_exit(mcp2515_exit);
MODULE_LICENSE("GPL");
189.3運行測試
189.3.1編譯驅動程序
在上一小節中的mcp2515.c代碼同一目錄下創建Makefile文件,Makefile文件內容如下所示:
export ARCH=arm64#設置平臺架構
export CROSS_COMPILE=aarch64-linux-gnu-#交叉編譯器前綴
obj-m += mcp2505.o #此處要和你的驅動源文件同名
KDIR :=/home/topeet/Linux/linux_sdk/kernel #這里是你的內核目錄
PWD ?= $(shell pwd)
all:
make -C $(KDIR) M=$(PWD) modules #make操作
clean:
make -C $(KDIR) M=$(PWD) clean #make clean操作
對于Makefile的內容注釋已在上圖添加,保存退出之后,來到存放mcp2515.c和Makefile文件目錄下,如下圖所示:

編譯完生成ft5x06_driver.ko目標文件,如下圖所示:

至此驅動模塊就編譯成功了。
189.3.2運行測試
在進行實驗之前,首先要確保開發板燒寫的是我們在186.1小節中編譯出來的boot.img。開發板啟動之后,然后使用以下命令進行驅動模塊的加載,如下圖所示:
insmod mcp2515.ko

根據打印信息可以得到讀取到的CAN狀態寄存器的值為0x80,換算成二進制為10000000,bit7-bit5為100,然后與下圖進行比對,證明當前mcp2515處在配置模式。

然后使用以下命令進行驅動模塊的卸載,如下圖所示:
rmmod mcp2515.ko

由于沒有在remove卸載函數中添加打印相關內容,所以使用rmmod命令卸載驅動之后,沒有任何打印,至此,MCP2515復位函數以及寄存器讀函數驗證實驗就完成了。
-
寄存器
+關注
關注
31文章
5421瀏覽量
123285 -
SPI
+關注
關注
17文章
1775瀏覽量
94644 -
RK3568
+關注
關注
5文章
575瀏覽量
6053
發布評論請先 登錄
北京迅為RK3568開發板OpenHarmony系統南向驅動開發內核HDF驅動框架架構



北京迅為iTOP-RK3568開發板OpenHarmony系統南向驅動開發實操-HDF驅動配置LED
【北京迅為】iTOP-RK3568開發板鴻蒙OpenHarmony系統南向驅動開發實操-HDF驅動配置UART






 工商網監
工商網監
評論