") 淺談瑞盟科技·MS1003——激光測(cè)距用高精度時(shí)間測(cè)量(TDC)電路
淺談瑞盟科技·MS1003——激光測(cè)距用高精度時(shí)間測(cè)量(TDC)電路
產(chǎn)品簡(jiǎn)述
MS1003 是一款高精度時(shí)間測(cè)量(TDC)電路,對(duì)比 MS1002 具
有更高的精度和更小的封裝,適合于高精度小封裝的應(yīng)用領(lǐng)域。
MS1003 具有雙通道、多脈沖的采樣能力、高速 SPI 通訊、
多種測(cè)量模式,適合于激光雷達(dá)和激光測(cè)距。

主要特點(diǎn)
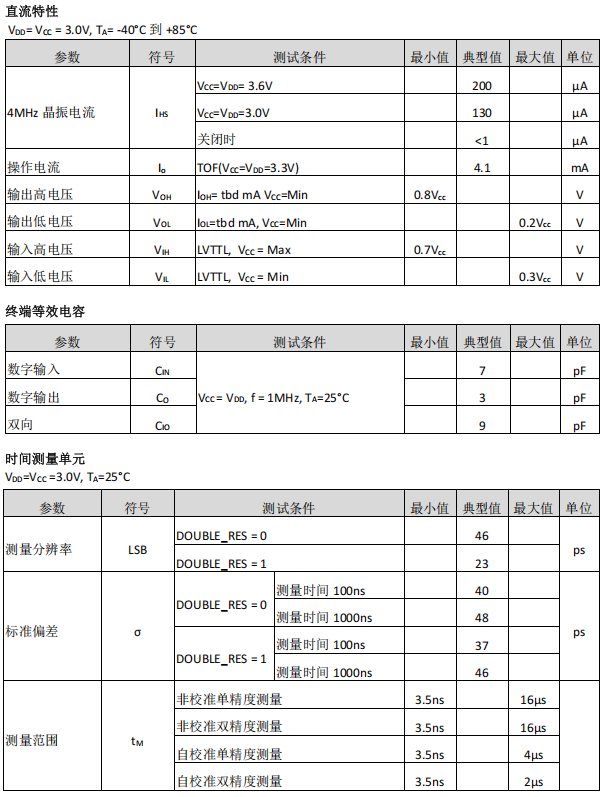
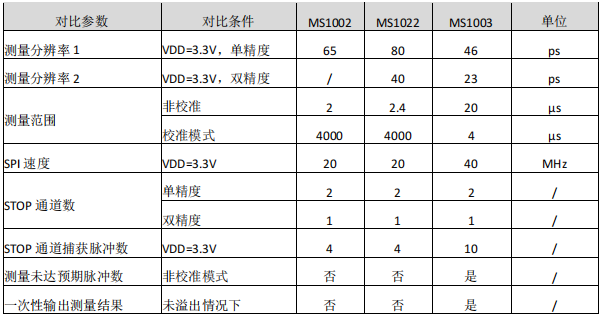
?雙通道單精度模式 46ps
?單通道雙精度模式 23ps
?非校準(zhǔn)單精度測(cè)量范圍 3.5ns(0ns)至 16μs
?非校準(zhǔn)雙精度測(cè)量范圍 3.5ns(0ns)至 16μs
?校準(zhǔn)單精度測(cè)量范圍 3.5ns(0ns)至 4μs
?校準(zhǔn)雙精度測(cè)量范圍 3.5ns(0ns)至 2μs
?10ns 最小脈沖間隔,雙通道最多可接收 20 個(gè)脈沖
?4 線 SPI 通信接口
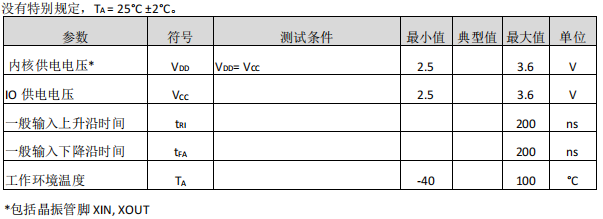
?工作電壓 2.5V 至 3.6V
?工作溫度-40°C 至+100°C
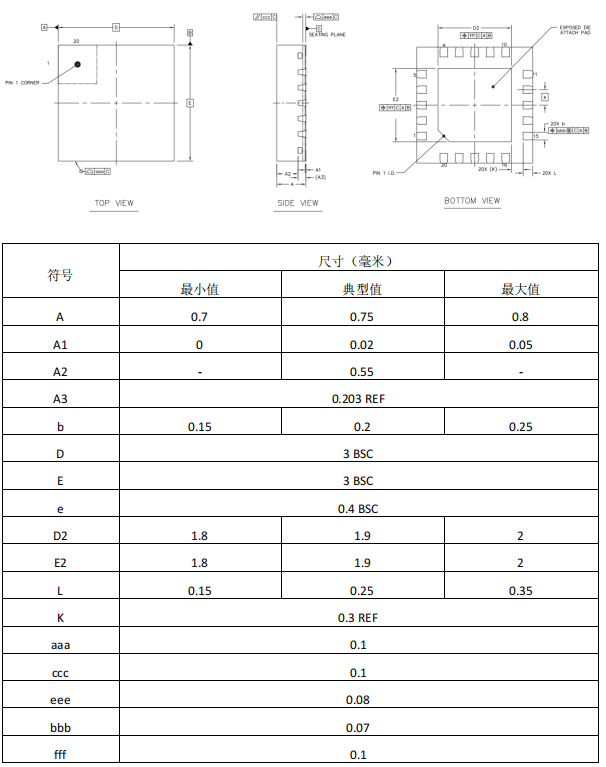
?QFN20 封裝
應(yīng)用
?激光雷達(dá)
?激光測(cè)距
?脈沖測(cè)量
產(chǎn)品規(guī)格分類

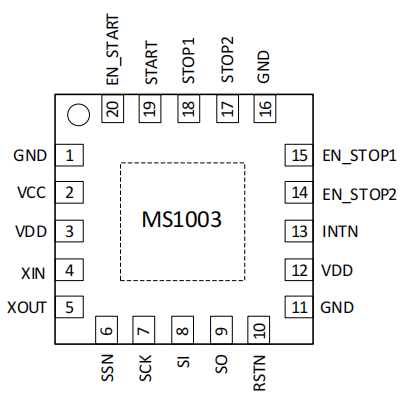
管腳圖
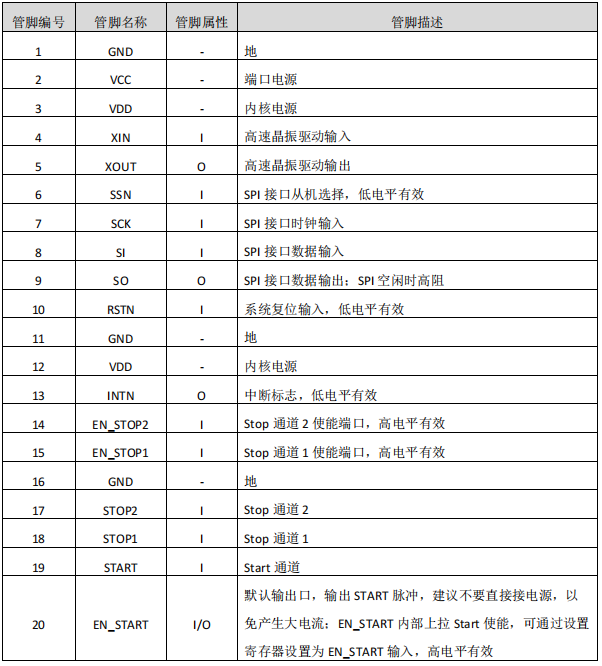
管腳說明
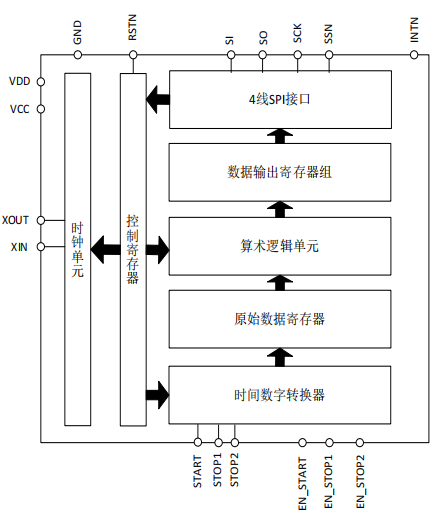
內(nèi)部框圖
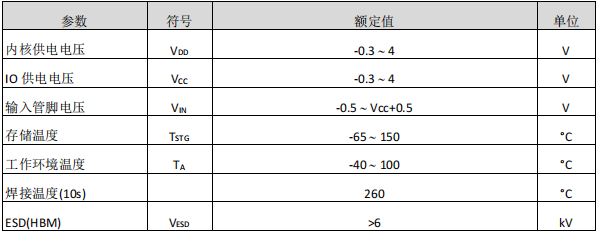
極限參數(shù)
芯片使用中,任何超過極限參數(shù)的應(yīng)用方式會(huì)對(duì)器件造成永久的損壞,芯片長(zhǎng)時(shí)間處于極限工作
狀態(tài)可能會(huì)影響器件的可靠性。極限參數(shù)只是由一系列極端測(cè)試得出,并不代表芯片可以正常工作在
此極限條件下。
推薦工作條件
電氣參數(shù)
功能描述
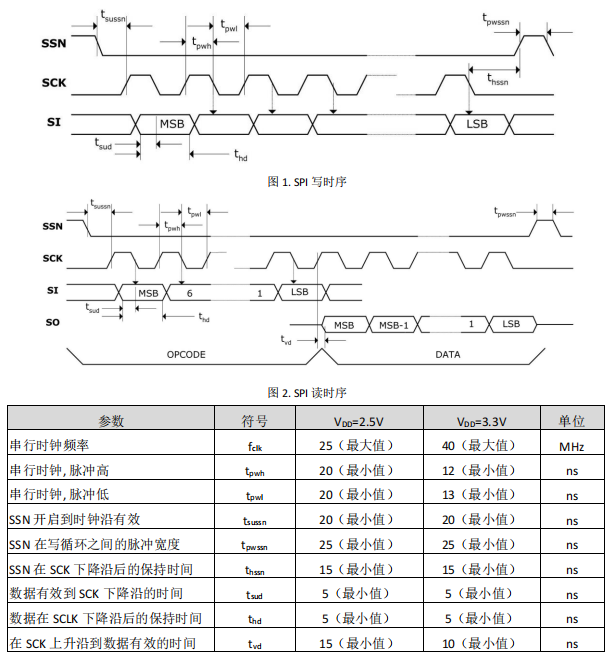
1. SPI接口
MS1003 的 SPI 接口是與 4 線制 SPI 兼容的,它需要一個(gè) SerialSelectNot (SSN)信號(hào),從而不能夠工
作在 3-線制 SPI 接口。
SSN 的下降沿或者第一個(gè) SCK 的上升沿將會(huì)復(fù)位 INTN 管腳(中斷管腳)狀態(tài)。
從最高位(MSB)開始傳輸以最低位(LSB)結(jié)束。傳輸是以字節(jié)方式完成的。數(shù)據(jù)傳輸可以在每個(gè)字節(jié)
后停止,通過給 SSN 發(fā)送一個(gè) LOW-HIGH-LOW 的電平。
如有需求請(qǐng)聯(lián)系——三亞微科技 王子文(16620966594)
4. 電源電壓
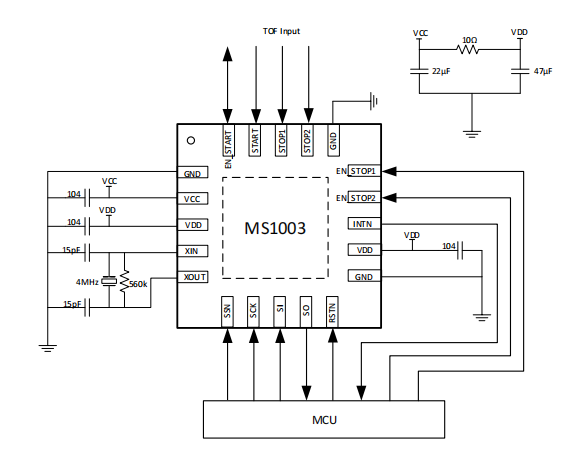
為了達(dá)到最佳測(cè)量效果,好的電源非常重要。電源應(yīng)該具有高電容性和低電感性。MS1003 提供兩
對(duì)電源供應(yīng)端口:VCC - I/O 供電電壓 ,VDD - 內(nèi)核供電電壓。
所有的 Ground 引腳都應(yīng)該連接到印刷電路板的地層上。 VCC 和 VDD 應(yīng)該通過一個(gè)電池或者固定
的線性電壓調(diào)節(jié)器給出。不要應(yīng)用開關(guān)式的調(diào)節(jié)器,避免由于 IO 電壓引起的干擾。
時(shí)間數(shù)字轉(zhuǎn)換器能夠有好的測(cè)量效果,完全取決于好的電源供電。芯片測(cè)量主要是脈沖式的電
流,因此一個(gè)充足的雙通濾波非常重要:VCC 47 μF (最小 22 μF),VDD 100 μF(最小 22 μF)。
電壓應(yīng)用通過一個(gè)模擬的調(diào)節(jié)器給出,我們推薦不要使用開關(guān)式的電壓調(diào)節(jié)。
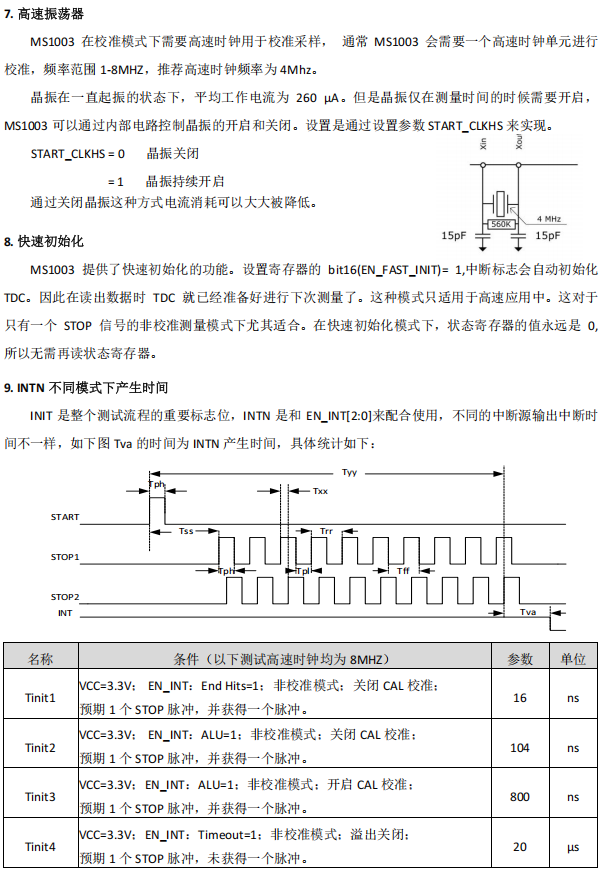
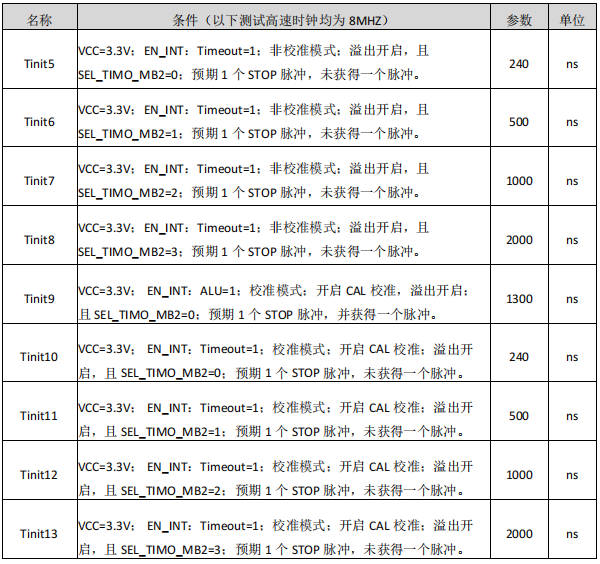
6. 時(shí)間測(cè)量
6.1 概述
非校準(zhǔn)單精度模式測(cè)量范圍從 3.5ns 到 16μs(0-16μs 在兩個(gè) stop 通道之間測(cè)量)。
非校準(zhǔn)雙精度模式測(cè)量范圍從 3.5ns 到 16μs(0-16μs 在兩個(gè) stop 通道之間測(cè)量)。
校準(zhǔn)模式單精度測(cè)量范圍從 3.5ns 到 4μs(0-4μs 在兩個(gè) stop 通道之間測(cè)量)。
校準(zhǔn)模式雙精度測(cè)量范圍從 3.5ns 到 2μs(0-2μs 在兩個(gè) stop 通道之間測(cè)量)。
單精度模式典型精度為 46 ps,2 個(gè) stop 通道相對(duì)于 start 通道。
雙精度模式典型精度為 23 ps,僅 stop1 通道相對(duì)應(yīng) start 通道。
內(nèi)置特殊防抖技術(shù),使測(cè)量時(shí)間高度精準(zhǔn)。
10 ns 的脈沖之間最小間隔。
兩個(gè) stop 通道可同時(shí)采集,且每個(gè) stop 通道最多 10 個(gè)脈沖。
每個(gè) stop 通道可選擇上升或下降沿捕獲,或者選擇上升和下降沿同時(shí)捕獲。
自動(dòng)測(cè)量 START 和 STOP 脈沖之間的時(shí)間間隔,無需再進(jìn)行寄存器設(shè)置。
可任意設(shè)置溢出時(shí)間,從而減少高速測(cè)量時(shí)溢出時(shí)間等待。
在非校準(zhǔn)模式下,可以任意測(cè)量比預(yù)期脈沖數(shù)少的脈沖。
典型應(yīng)用: 激光測(cè)距、激光雷達(dá)、高精度延時(shí)測(cè)量。
6.2 高精度時(shí)間測(cè)量原理
數(shù)字式 TDC 應(yīng)用內(nèi)部的邏輯門延時(shí)來高精度測(cè)量時(shí)間間隔,下圖闡述了這種絕對(duì)時(shí)間 TDC 的測(cè)量
原理結(jié)構(gòu)。該電路結(jié)構(gòu)確保電路以特殊的測(cè)量方法,使信號(hào)通過邏輯門的時(shí)間可以非常精確。最高的
測(cè)量精度完全取決于內(nèi)部通過邏輯門的傳播時(shí)間。
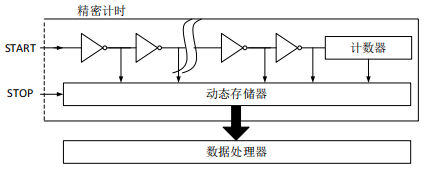
時(shí)間測(cè)量是通過一個(gè) start 信號(hào)觸發(fā),通過內(nèi)部防抖處理后,TDC 的門電路開始高速計(jì)數(shù),直到 stop
信號(hào)產(chǎn)生記錄計(jì)數(shù)結(jié)果,達(dá)到 STOP 預(yù)期脈沖數(shù)后停止計(jì)數(shù)。
3.3V 和 25°C 時(shí),MS1003 的單精度最小分辨率是 46ps。溫度和電壓對(duì)門電路的傳播延時(shí)時(shí)間有很
大的影響。通常是通過校準(zhǔn)來補(bǔ)償由溫度和電壓變化而引起的誤差。在校準(zhǔn)過程中,TDC 測(cè)量 0.5 個(gè)
和 1.5 個(gè)時(shí)鐘周期,相減后得一個(gè)時(shí)鐘周期的 TDC 計(jì)數(shù)結(jié)果,即為校準(zhǔn)值。測(cè)量范圍受計(jì)數(shù)器大小的
限制,以下是非校準(zhǔn)模式下最大測(cè)量范圍:tyy = 46 ps x 442368 ≈ 20 μs。
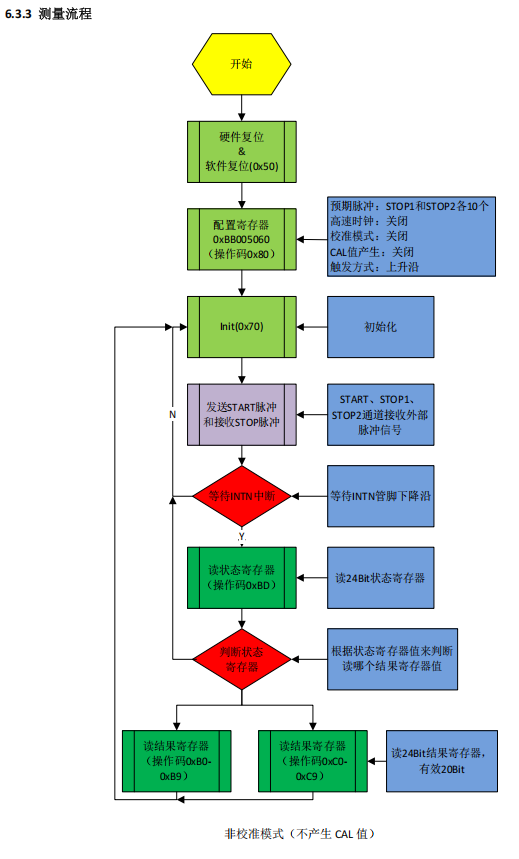
6.3 非校準(zhǔn)時(shí)間測(cè)量
6.3.1 非校準(zhǔn)時(shí)間測(cè)量概述
非校準(zhǔn)時(shí)間測(cè)量,實(shí)際上就是應(yīng)用數(shù)字式 TDC 內(nèi)部的邏輯門延時(shí)來實(shí)現(xiàn)高精度時(shí)間測(cè)量,非校準(zhǔn)
模式下最大測(cè)量范圍是 3.5ns-16μs,單精度模式下,可以兩個(gè) STOP 通道同時(shí)測(cè)量,且每個(gè)通道最多可
以測(cè)量 10 個(gè) STOP 脈沖,雙精度模式下,僅 STOP1 通道可以使用。
非校準(zhǔn)時(shí)間測(cè)量過程中,無需高速時(shí)鐘參與,所以可以通過寄存器設(shè)置來關(guān)閉高速時(shí)鐘
( START_CLKHS=0),在該模式下,測(cè)量速度最快,結(jié)果寄存器直接輸出門延時(shí)個(gè)數(shù),在非校準(zhǔn)模式下結(jié)
果寄存器 20 位的有效位,測(cè)量時(shí)間計(jì)算如下,該測(cè)量時(shí)間受溫度和電壓影響。
測(cè)量時(shí)間=RES_X×46ps (DOUBLE_RES=0)
測(cè)量時(shí)間=RES_X×23ps (DOUBLE_RES=1)
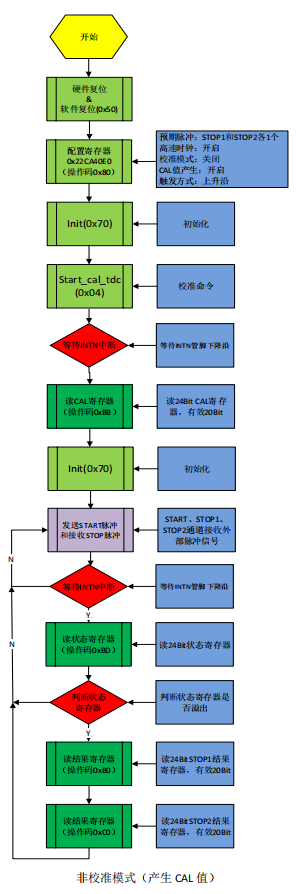
非校準(zhǔn)模式下也可以實(shí)現(xiàn)時(shí)間測(cè)量和 CAL 值同時(shí)測(cè)量,在該模式下需要開啟高速時(shí)鐘
(START_CLKHS=1)和開啟自動(dòng)校準(zhǔn)(NO_CAL_AUTO=0),這樣就會(huì)測(cè)量時(shí)間的同時(shí)會(huì)產(chǎn)生一個(gè) Tref× N 周期
的門延時(shí)個(gè)數(shù),然后將 CAL 值 RES_Tref 存在指定的結(jié)果寄存器中。測(cè)量時(shí)間如下計(jì)算,該測(cè)量時(shí)間和
溫度和電壓無關(guān),僅和高速時(shí)鐘抖動(dòng)有關(guān)。
測(cè)量時(shí)間=RES_X/RES_Tref×Tref× N, N = 1, 2,4,8;
非校準(zhǔn)模式測(cè)量溢出,當(dāng)溢出時(shí)間功能關(guān)閉(EN_SEL_TIMO=0)的情況下,溢出時(shí)間相當(dāng)于 TDC 溢
出,也就是要 20μs 后產(chǎn)生溢出,并且狀態(tài)寄存器 Bit13=1(TDC 溢出);當(dāng)溢出時(shí)間功能開啟
(EN_SEL_TIMO=1)的情況下,溢出時(shí)間由溢出時(shí)間選擇(SEL_TIMO)進(jìn)行設(shè)置,溢出時(shí)間僅和高速時(shí)鐘相
關(guān),不受時(shí)鐘分頻(DIV_CLKHS)的影響,例如高速時(shí)鐘為 8MHZ,SEL_TIMO=0 的情況下,溢出時(shí)間為
125ns,溢出時(shí)狀態(tài)寄存器 Bit14=1(時(shí)間溢出)。
非校準(zhǔn)模式下,當(dāng)測(cè)量脈沖個(gè)數(shù)小于預(yù)期脈沖個(gè)數(shù)時(shí),可以正常輸出測(cè)量脈沖的值,雖然這時(shí)狀
態(tài)寄存器溢出,但測(cè)量到的脈沖產(chǎn)生的結(jié)果是正確的,這種應(yīng)用可以解決在測(cè)距過程中多個(gè)不定目標(biāo)
的問題。
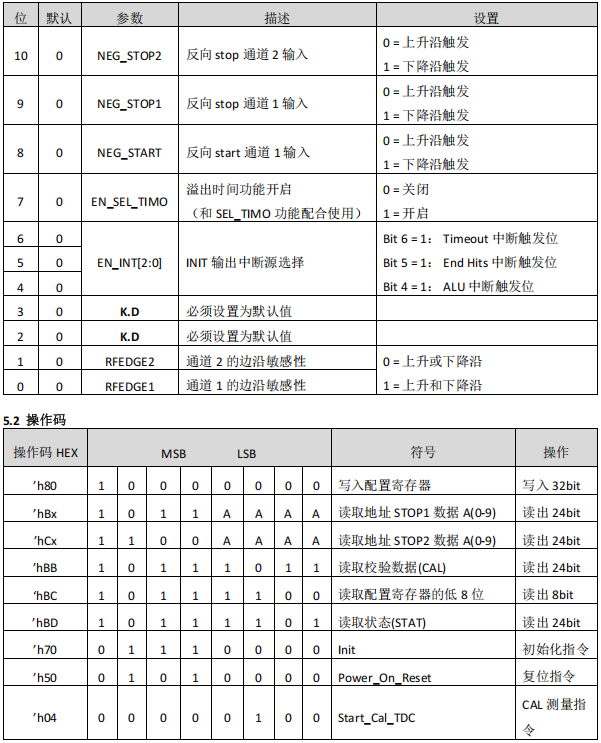
6.3.2 寄存器設(shè)置
主要的設(shè)置為:
a. 選擇測(cè)量預(yù)期脈沖個(gè)數(shù)
寄存器 bit 31-28 設(shè)置 STOP2 預(yù)期脈沖個(gè)數(shù) HITIN2=0 或者 2-B;
寄存器 bit 27-24 設(shè)置 STOP1 預(yù)期脈沖個(gè)數(shù) HITIN1=2-B,不能設(shè)置為 0;否則無法開啟測(cè)量。
b. 選擇測(cè)量精度
寄存器 bit 18, DOUBLE_RES = 1 選擇雙精度模式,測(cè)量精度為典型 23ps 但僅有一個(gè) stop 通道可用。
DOUBLE_RES = 0 選擇單精度模式,測(cè)量精度為典型 46ps,這時(shí)兩個(gè) stop 通道都可用。
c. 校準(zhǔn)選擇
在非校準(zhǔn)模式下,校準(zhǔn)將關(guān)閉,寄存器 bit 13 CALIBRATE=0;
d. 產(chǎn)生 CAL 值
在非校準(zhǔn)模式下,可以選擇產(chǎn)生 CAL 值和不產(chǎn)生 CAL 值,寄存器 bit 12 NO_CAL_AUTO=0 時(shí),產(chǎn)生
CAL 值,NO_CAL_AUTO=1 時(shí),不產(chǎn)生 CAL 值。
e. 溢出選擇
在非校準(zhǔn)模式下,寄存器 bit 7 EN_SEL_TIMO=0 溢出時(shí)間關(guān)閉,這時(shí)溢出時(shí)間為 TDC 溢出,當(dāng)
EN_SEL_TIMO=1 時(shí)開啟溢出時(shí)間,且溢出時(shí)間和寄存器 bit 23-22 SEL_TIMO 設(shè)置有關(guān)。
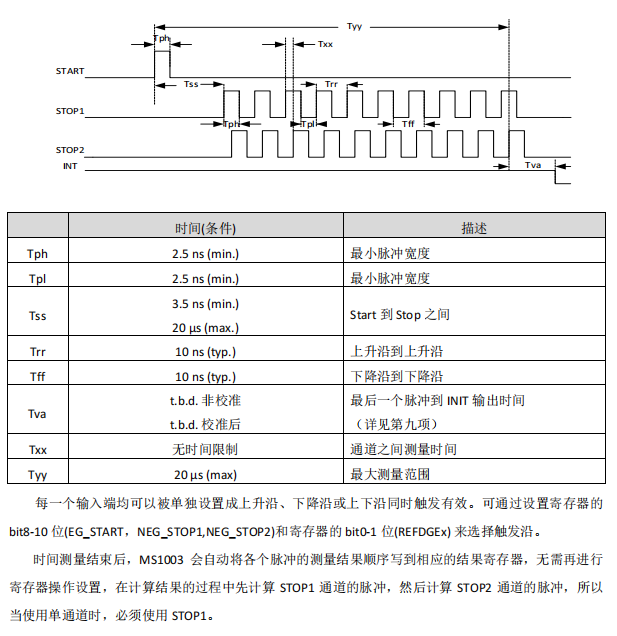
f. 選擇輸入觸發(fā)方式
可通過設(shè)置寄存器的 Bit 8-10(NEG_X)在每一個(gè)輸入端口(Start, Stop1, Stop2)邊沿觸發(fā)方式。當(dāng) RFEDGE
= 0 時(shí),NEG_X = 0 則上升沿觸發(fā),NEG_X = 1 則下降沿發(fā)。還可以通過設(shè)置寄存器的 Bit0&1(REFDGE1 &
FEDGE2),選擇 STOP 由上升沿或下降沿單獨(dú)觸發(fā)(RFEDGE=0)還是上升沿和下降沿同時(shí)觸發(fā)(RFEDGE=1),
當(dāng) RFEDGE=1 時(shí),Bit 9-10 選擇無效。
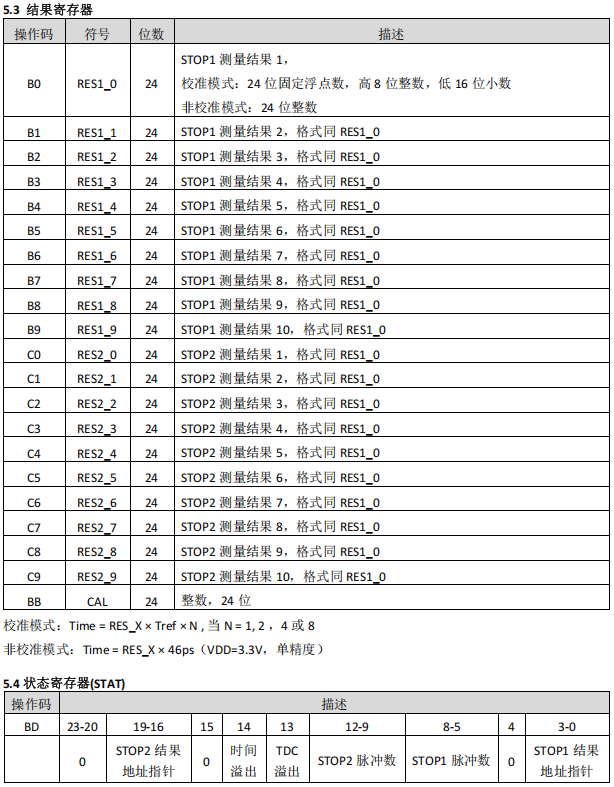
g. 中斷
中斷引腳 INTN 可以有不同的中斷源,在寄存器的 Bits4-6(EN_INT)中進(jìn)行選擇,非校準(zhǔn)模式選擇 bit 6 =
1 和 bit 5= 1;
Reg bit 4 = 1 ALU 已經(jīng)準(zhǔn)備好 。
Reg bit 5 = 1 預(yù)期脈沖個(gè)數(shù)全部被接收到。
Reg bit 6 = 1 測(cè)量時(shí)間溢出。
如有需求請(qǐng)聯(lián)系——三亞微科技 王子文(16620966594)
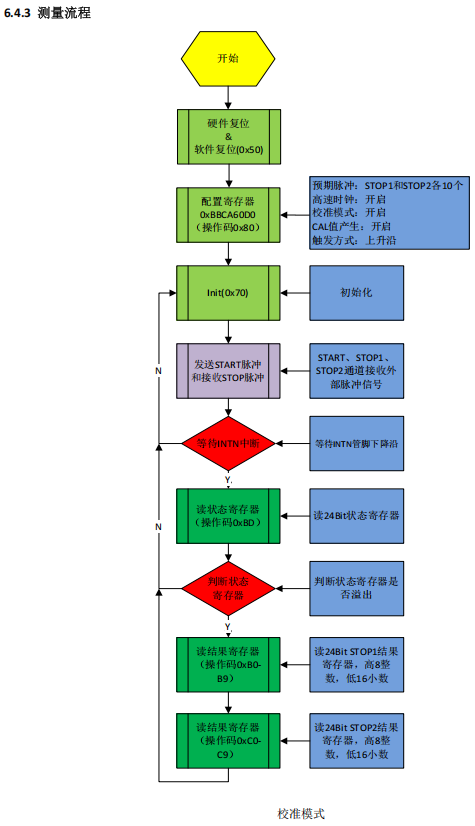
6.4 校準(zhǔn)時(shí)間測(cè)量
注:校準(zhǔn)測(cè)量單精度最大測(cè)量范圍 4μs,雙精度最大測(cè)量范圍 2μs。
6.4.1 校準(zhǔn)時(shí)間測(cè)量概述
校準(zhǔn)時(shí)間測(cè)量,在高速振蕩器開啟情況下進(jìn)行測(cè)量,測(cè)量的門延時(shí)數(shù)量和 Tref 門延時(shí)數(shù)量通過
ALU 進(jìn)行計(jì)算并輸出到結(jié)果寄存器。輸出的結(jié)果為 24 位浮點(diǎn)數(shù),高 8 位為整數(shù)位,低 16 位為小數(shù)
位。校準(zhǔn)模式下最大測(cè)量范圍是 3.5ns-4μs,單精度模式下,可以兩個(gè) STOP 通道同時(shí)測(cè)量,且每個(gè)通
道最多可以測(cè)量 10 個(gè) STOP 脈沖,雙精度模式下,僅 STOP1 通道可以使用。
校準(zhǔn)時(shí)間測(cè)量過程中,需要開啟高速時(shí)鐘( START_CLKHS=1)和校準(zhǔn)開啟(CALIBRATE=1),當(dāng)產(chǎn)生校準(zhǔn)
值關(guān)閉(NO_CAL_AUTOCALIBRATE=1)結(jié)果寄存器輸出非校準(zhǔn)值(可參考非校準(zhǔn)部分介紹),當(dāng)產(chǎn)生校準(zhǔn)
值開啟(NO_CAL_AUTOCALIBRATE=0)時(shí),結(jié)果寄存器輸出校準(zhǔn)后的值 RES_X,測(cè)量時(shí)間如下計(jì)算,被測(cè)
時(shí)差不能超過 2 ×Tref× DIV_CLKHS。
測(cè)量時(shí)間= RES_X × Tref × N, N = 1, 2,4,8;
在校準(zhǔn)時(shí)間測(cè)量中,必須開啟溢出時(shí)間功能(EN_SEL_TIMO=1),溢出時(shí)間由溢出時(shí)間選擇
(SEL_TIMO)進(jìn)行選擇溢出時(shí)間,這里的時(shí)間僅和高速時(shí)鐘相關(guān),不受時(shí)鐘分頻(DIV_CLKHS)的影響,例
如高速時(shí)鐘為 8MHZ,SEL_TIMO=0 的情況下,溢出時(shí)間為 250ns,這時(shí)狀態(tài)寄存器 Bit14=1(時(shí)間溢
出)。
校準(zhǔn)模式下,測(cè)量脈沖個(gè)數(shù)必須大于或者等于預(yù)期脈沖個(gè)數(shù),當(dāng)測(cè)量脈沖小于預(yù)期脈沖個(gè)數(shù)時(shí),
ALU 不進(jìn)行計(jì)算,這時(shí)狀態(tài)寄存器 Bit14=1(時(shí)間溢出)。且 EN_ERR_VAL=1 的情況下,結(jié)果寄存器 0
輸出 0xFFFFFFFFFF。
6.4.2 寄存器設(shè)置
主要的設(shè)置為:
a. 選擇測(cè)量預(yù)期脈沖個(gè)數(shù)
寄存器 bit 31-28 設(shè)置 STOP2 預(yù)期脈沖個(gè)數(shù) HITIN2=0 或者 2-B;
寄存器 bit 27-24 設(shè)置 STOP1 預(yù)期脈沖個(gè)數(shù) HITIN1=2-B,不能設(shè)置為 0;否則無法開啟測(cè)量。
b. 選擇測(cè)量精度
寄存器 bit 18, DOUBLE_RES = 1 選擇雙精度模式,測(cè)量精度為典型 23ps,但僅有一個(gè) stop 通道可用。
DOUBLE_RES = 0 選擇單精度模式,測(cè)量精度為典型 46ps,這時(shí)兩個(gè) stop 通道都可用。
c. 校準(zhǔn)選擇
在校準(zhǔn)模式下,高速晶振和校準(zhǔn)都必須開啟,寄存器 bit 13 CALIBRATE=1 和 bit 19
START_CLKHS=1
d. 產(chǎn)生 CAL 值
在校準(zhǔn)模式下,必須選擇產(chǎn)生 CAL 值,寄存器 bit 12 NO_CAL_AUTO=0 時(shí),產(chǎn)生 CAL 值。
e. 溢出選擇
在校準(zhǔn)模式下,必須開啟溢出,寄存器 bit 7 EN_SEL_TIMO=1 開啟溢出時(shí)間,且溢出時(shí)間和寄存器
bit 23-22 SEL_TIMO 設(shè)置有關(guān)。
f. 選擇輸入觸發(fā)方式
可通過設(shè)置寄存器的 Bit 8-10(NEG_X)在每一個(gè)輸入端口(Start,Stop1,Stop2)邊沿觸發(fā)方式。當(dāng) RFEDGE
= 0 時(shí),NEG_X = 0 則上升沿觸發(fā),NEG_X = 1 則下降沿發(fā)。還可以通過設(shè)置寄存器的 Bit0&1(REFDGE1 &
FEDGE2),可以選擇 STOP 下降沿單獨(dú)觸發(fā)(RFEDGE=0)還是上升沿和下降沿同時(shí)觸發(fā)(RFEDGE=1),當(dāng)
RFEDGE=1 時(shí),Bit 9-10 選擇無效。
g. 中斷
中斷引腳 INT 可以有不同的中斷源,在寄存器的 Bits4-6(EN_INT)中進(jìn)行選擇,由于 Reg bit 5=1 中斷輸
出最早,Reg bit 4=1 輸出最晚,用戶可以根據(jù)實(shí)際情況進(jìn)行選擇。
Reg bit 4 = 1 ALU 已經(jīng)準(zhǔn)備好 。
Reg bit 5 = 1 預(yù)期脈沖個(gè)數(shù)全部被接收到。
Reg bit 6 = 1 測(cè)量時(shí)間溢出&TDC 溢出。
h. 高速時(shí)鐘分頻
由于校準(zhǔn)測(cè)量時(shí)間小于 2×Tref,所以需要測(cè)量時(shí)間增長(zhǎng)的話,需要設(shè)置高速時(shí)鐘分頻,在寄存器的
Bits20-21(DIV_CLKHS)中進(jìn)行設(shè)置,但 2×Tref 不能超出測(cè)量范圍最大值 4μs。
如有需求請(qǐng)聯(lián)系——三亞微科技 王子文(16620966594)
典型應(yīng)用圖
MS1002&MS1022&MS1003 主要性能對(duì)比
封裝外形圖
QFN20
——愛研究芯片的小王
審核編輯 黃宇
-
激光測(cè)距
+關(guān)注
關(guān)注
9文章
168瀏覽量
28108 -
TDC
+關(guān)注
關(guān)注
0文章
39瀏覽量
13934
發(fā)布評(píng)論請(qǐng)先 登錄
高精度激光測(cè)距傳感器:工業(yè)精密測(cè)量的“隱形守護(hù)者”
瑞盟科技--光通信與光電領(lǐng)域芯片應(yīng)用解決方案
MS多傳感器/激光測(cè)試系統(tǒng):可進(jìn)行MTF、MRTD高精度測(cè)試

瑞盟dTOF激光測(cè)距技術(shù)全鏈路解決方案
瑞盟超聲波TOF測(cè)量技術(shù)解決方案
淺談瑞盟科技·MS1030——超聲波流量高精度測(cè)量電路
行業(yè)知識(shí) | CMOS激光位移傳感器如何實(shí)現(xiàn)高精度測(cè)量?

使用TDC去測(cè)量pwm兩個(gè)波形相位延時(shí)時(shí)間,如何去設(shè)計(jì)TDC7201的外圍電路?
MS1205N——激光測(cè)距用高精度時(shí)間測(cè)量(TDC)電路
MS1022——高精度時(shí)間測(cè)量(TDC)電路
物聯(lián)網(wǎng)系統(tǒng)中的高精度測(cè)距方案_單點(diǎn)TOF激光雷達(dá)

激光測(cè)距傳感器的安裝方式有哪些
激光測(cè)距傳感器的工作原理是什么?
TDC7201適用于激光雷達(dá)、測(cè)距儀和ADAS中飛行時(shí)間應(yīng)用的時(shí)間-數(shù)字轉(zhuǎn)換器數(shù)據(jù)表






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論