 MS41968——低壓、多通道鏡頭驅動芯片(內置光圈控制)
MS41968——低壓、多通道鏡頭驅動芯片(內置光圈控制)
產品簡述
MS41968 是一款低壓 5V 多通道鏡頭驅動芯片,
集成 Hall 模式的光圈驅動、四通道步進電機驅動、兩
動部分采用具有電流細分的電壓驅動方式以及扭矩紋
波修正技術,實現了超低噪聲微步進電機驅動。
主要特點
?電壓驅動方式,256 細分微步進驅動電路:
工作電壓 5V,每個 H 橋驅動電流±0.4A
?四線 SPI 串行總線通信控制電機
?Hall 位置檢測的 PID 光圈控制
?四通道高精度步進電機驅動
?兩通道直流電機驅動用于 IRCUT,
也可以組合成第五個通道的步進驅動
?四通道 LED 驅動
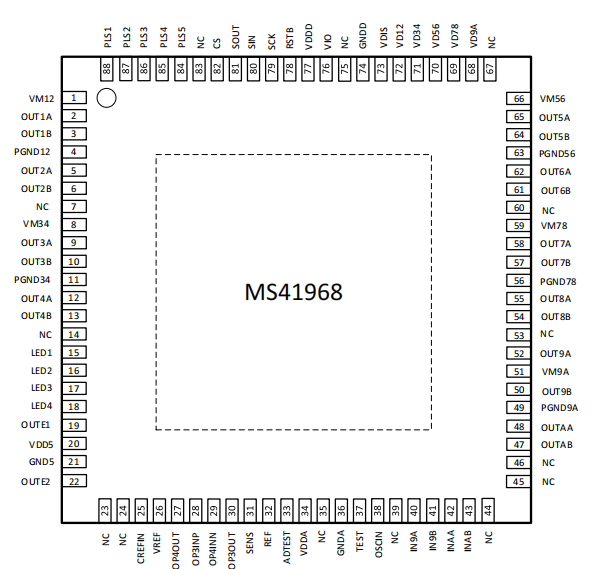
?QFN88 (10x10) 封裝
應用
?攝像機
?監控攝像機MS41968 集成邏輯 IO 接口電源供電 VIO,可以
應用于 1.2V 到 3.6V 的不同電壓接口。
產品規格分類
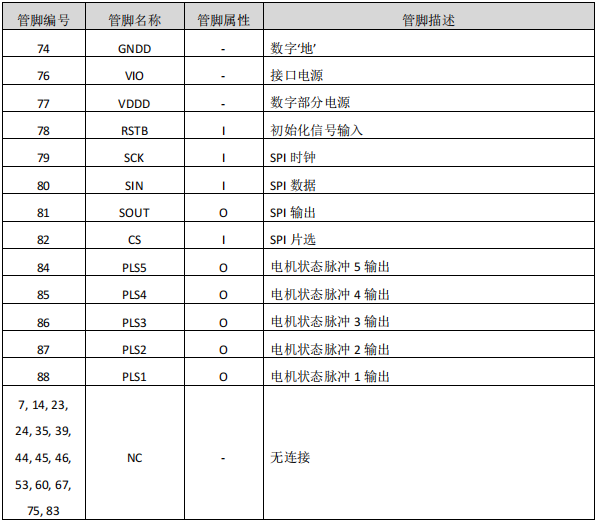
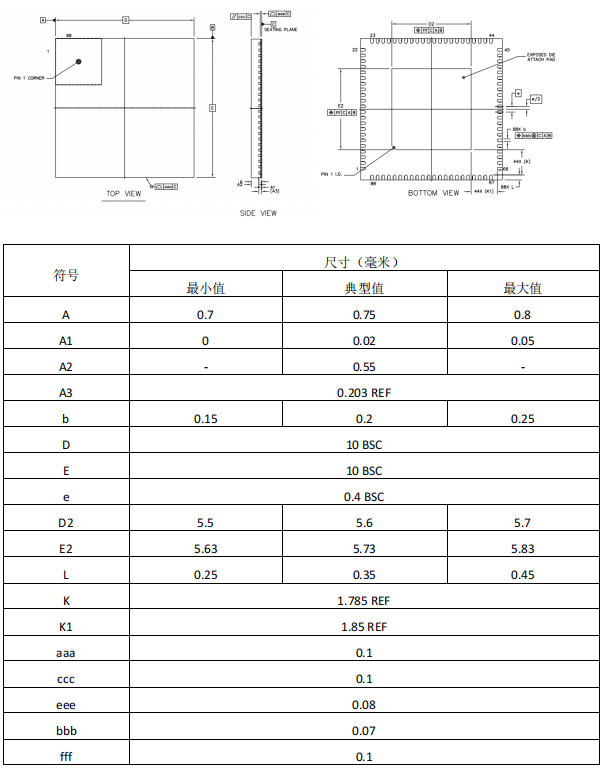
管腳圖
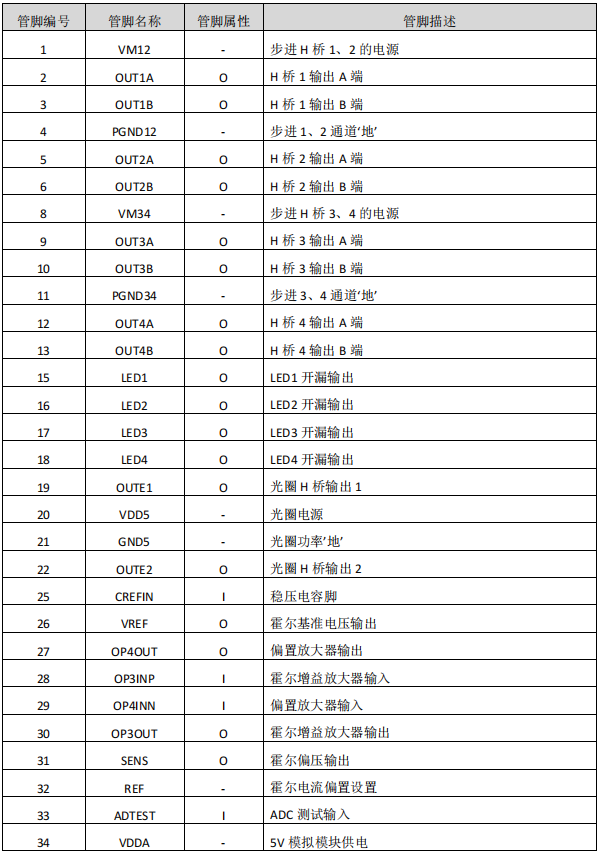
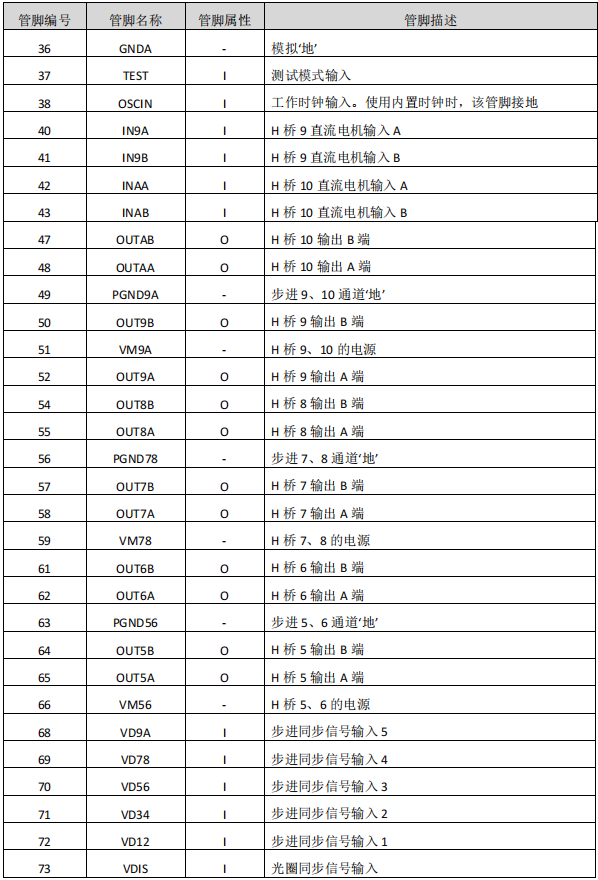
管腳說明
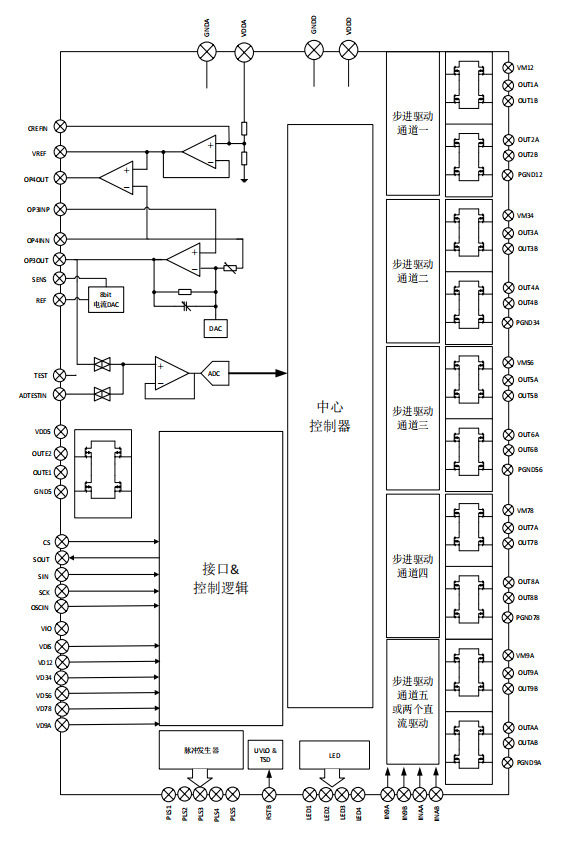
內部框圖
極限參數
絕對最大額定值
芯片使用中,任何超過極限參數的應用方式會對器件造成永久的損壞,芯片長時間處于極限工作
狀態可能會影響器件的可靠性。極限參數只是由一系列極端測試得出,并不代表芯片可以正常工作在
此極限條件下。
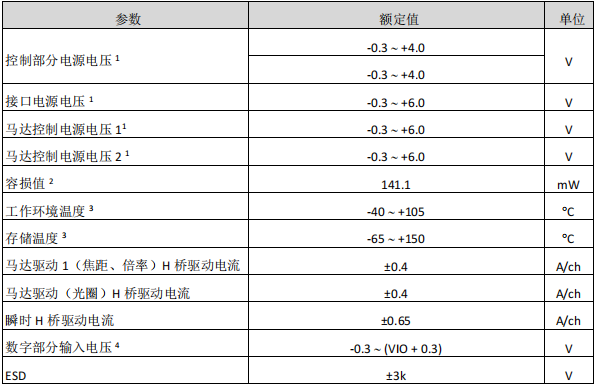
注:1. 絕對最大額定值,是指在容損范圍內使用的場合。
2. 容損值,是指在Ta = 85°C 時封裝單體的值。實際使用時,希望在參考技術資料和PD- Ta特性圖的基
礎上,依據電源電壓、負荷、環境溫度條件,進行不超過容損值的散熱設計。
3. 除了容損值、工作環境溫度以及存儲溫度的參數以外,所有溫度為 Ta = 25°C。
4. (VIO + 0.3)電壓不可超過5.5V。
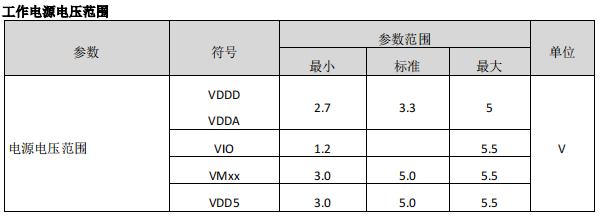
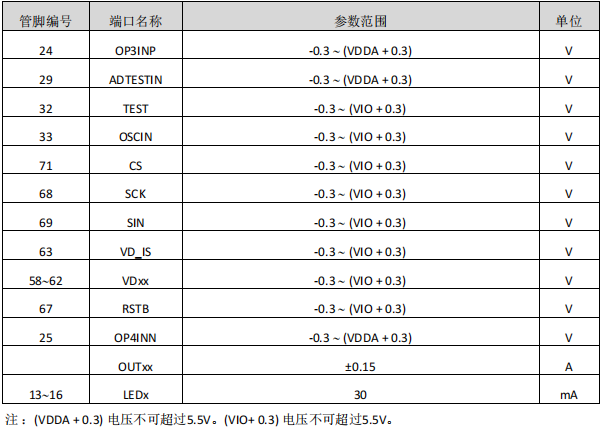
端子容許電流電壓范圍
注:1. 容許端子電流電壓范圍,是指任何情況下不允許超過這個電氣參數范圍。
2. 額定電壓值,是指對 GND 的各端子的電壓。GND 是指 GNDD,MGNDx。
3. 應用時,VDDA 與 VDDD 需要接一起,可以接 2.7V?5V 電源。另外,需要保證 VMxx 電壓大于等于
VDDA 的電壓。
4. 在下面沒有記述的端子以外,嚴禁從外界輸入電壓和電流。
5. 關于電流,“+”表示流向 IC 的電流,“-”表示從 IC 流出的電流。
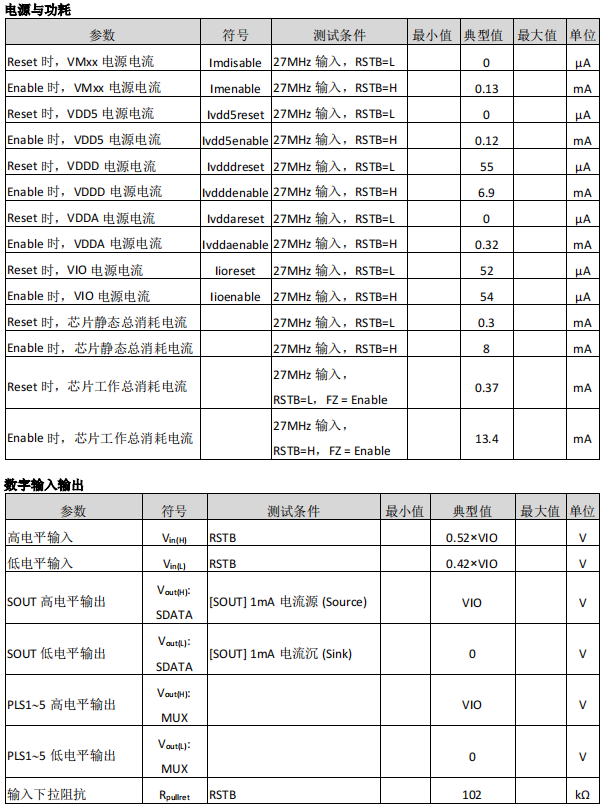
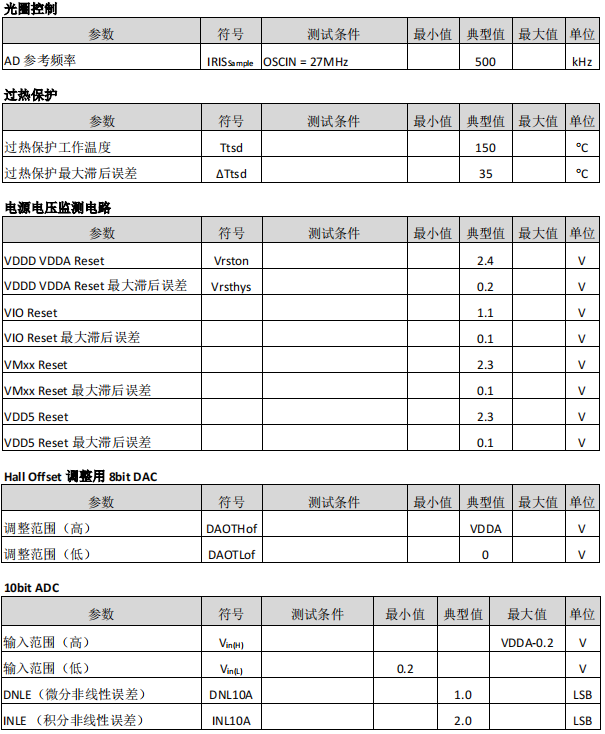
電氣參數
VDD5=VMx =5V,VDDD=VDDA=3.3V, VIO=3.3V。沒有特別規定,環境溫度為Ta=25°C±2°C。
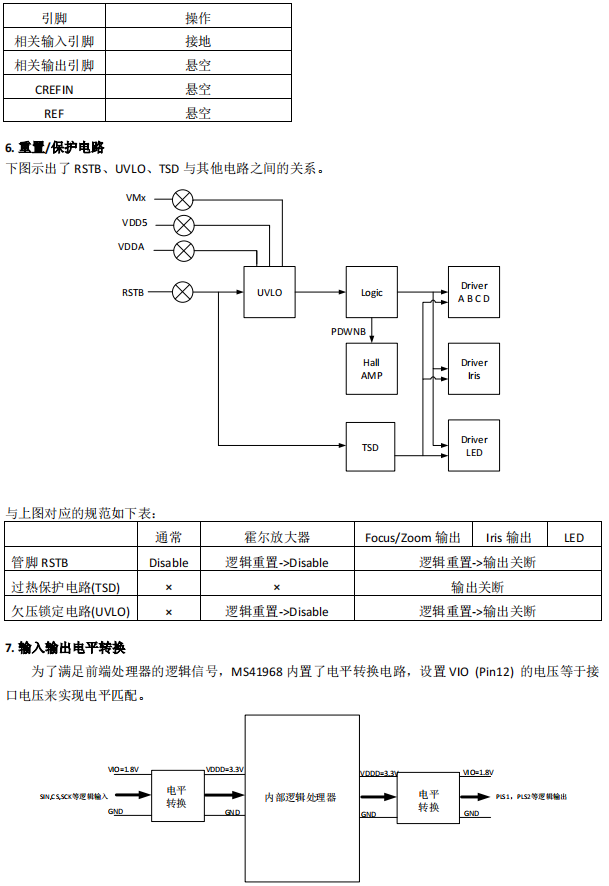
功能描述
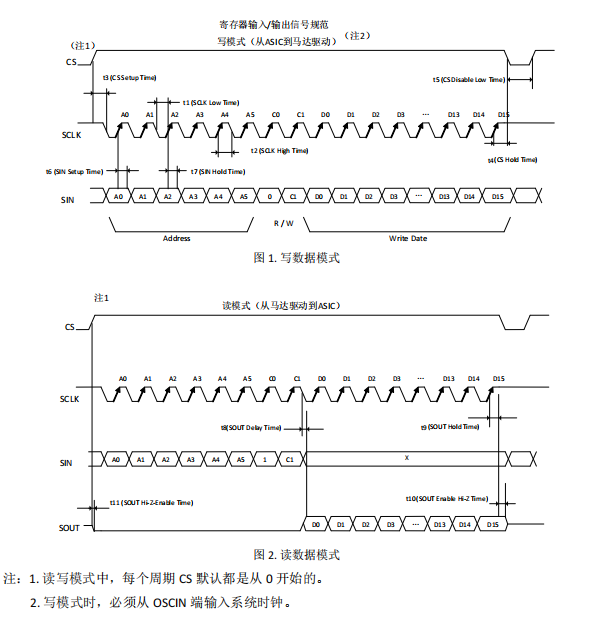
1. 串行接口
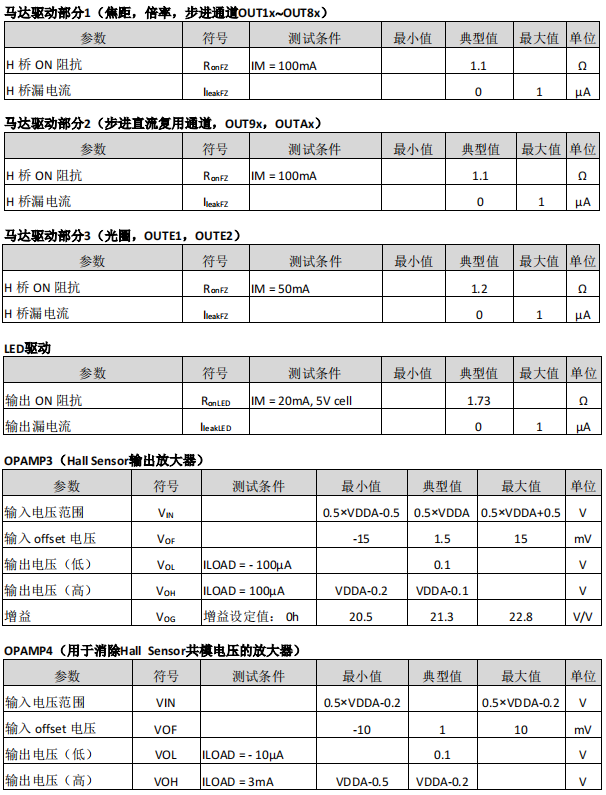
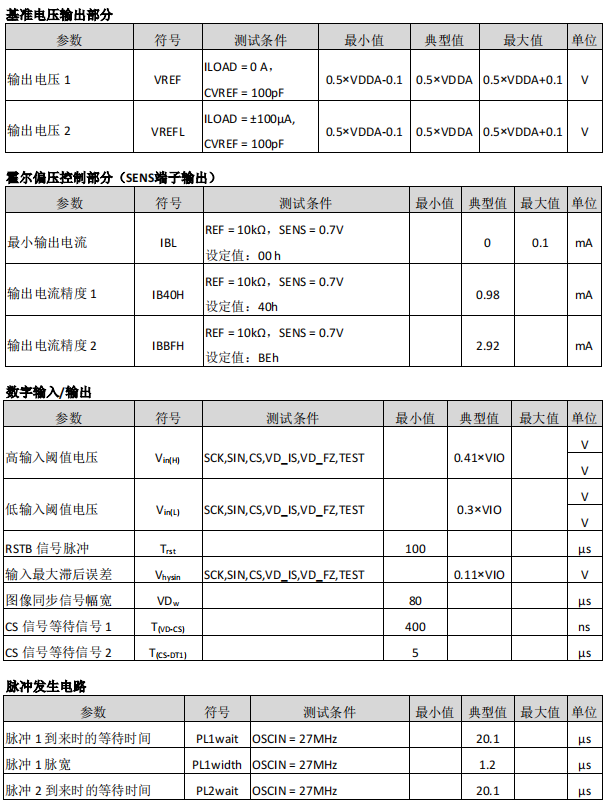
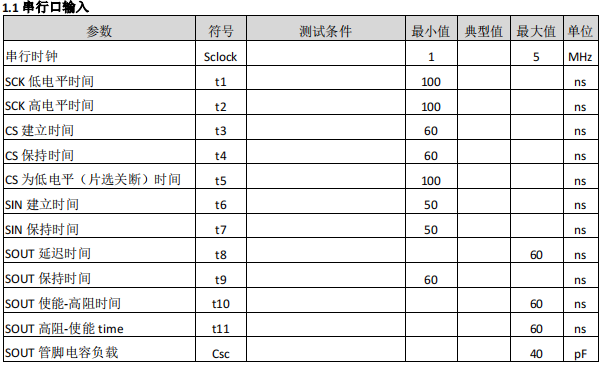
電氣參數(設計參考值)
VDD5=VMxx=5V,VDDD=VDDA=3.3V,VIO=3.3V。沒有特別規定,Ta = 25°C ±2°C。
1. 數據轉換在 CS 的上升沿開始,在 CS 的下降沿停止。
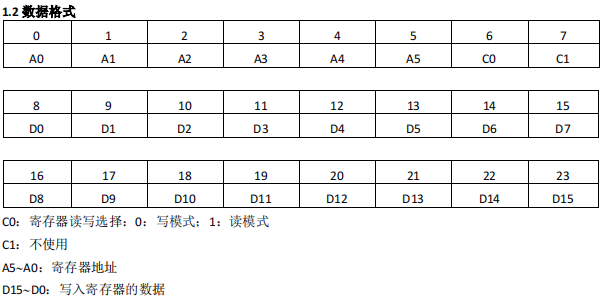
2. 一次轉換的數據流單位是 24 位。
3. 當地址和數據從 SIN 引腳輸入時,同時鐘信號 SCK 保持一致在CS = 1的條件下。
4. 數據在SCK信號的上升沿被打入IC。
同時,數據輸出時,在 SOUT 引腳讀出(數據在SCK的上升沿輸出)
5. 在CS = 0時,SOUT 輸出高阻態,并且在CS= 1,輸出“0”,除非有數據讀出。
6. 整個串行接口的控制在CS = 0時復位。
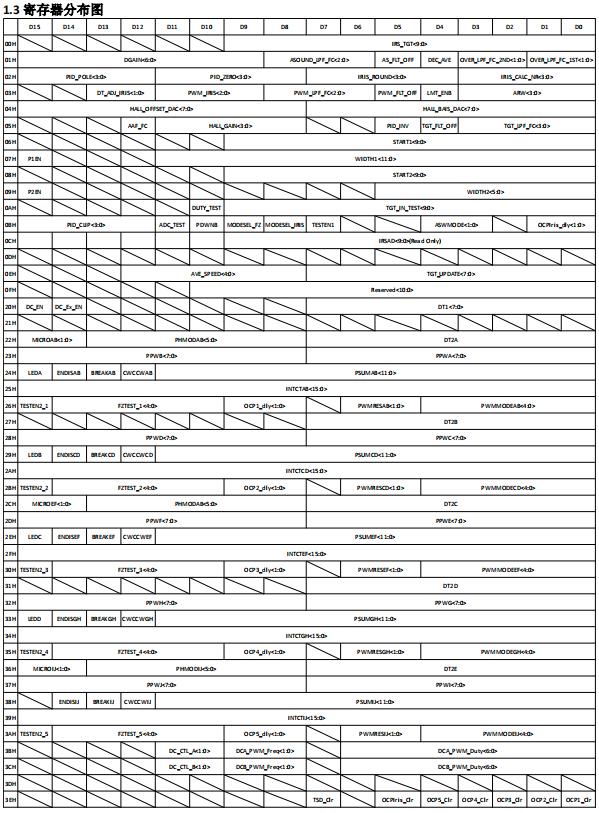
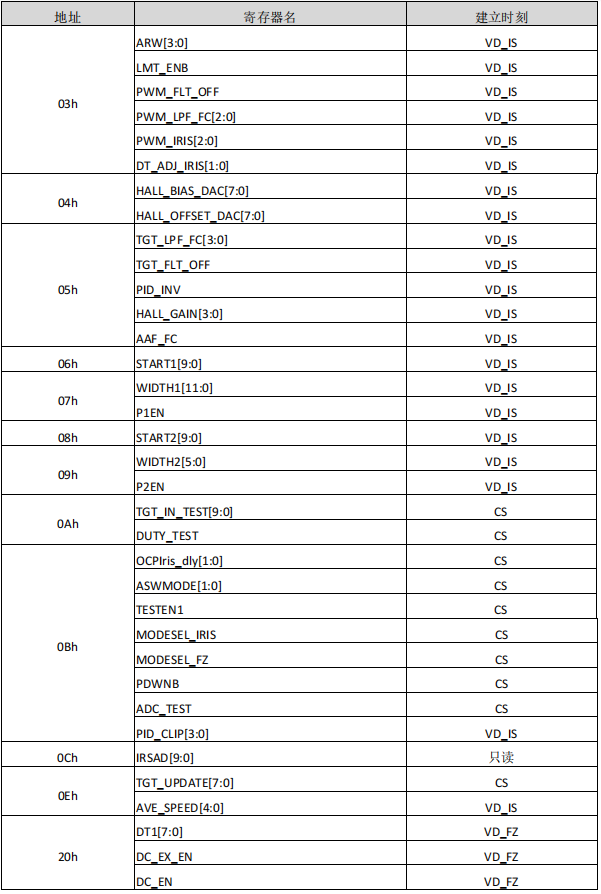
1.4 寄存器列表
所有寄存器位數據在RSTB = 0時被初始化。
其中,α通道對應由OUT1A、 OUT1B、OUT2A、 OUT2B組成的步進電機通道。
其中,β通道對應由OUT3A、OUT3B、 OUT4A、 OUT4B組成的步進電機通道。
其中,γ通道對應由OUT5A、OUT5B、 OUT6A、OUT6B組成的步進電機通道。
其中,δ通道對應由OUT7A、 OUT7B、 OUT8A、OUT8B組成的步進電機通道。
其中,ε通道對應由OUT9A、OUT9B、 OUTAA、 OUTAB組成的步進電機通道。
*注:27h、31h地址對應的β通道、δ通道沒有細分選項(固定為256分頻)和相位矯正選項。27h、31h
地址的D15?D8需要固化為0。
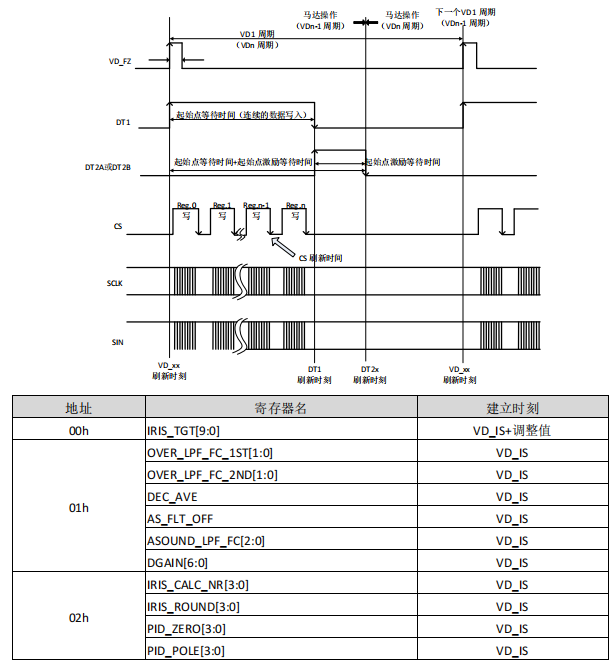
1.5 寄存器建立時刻
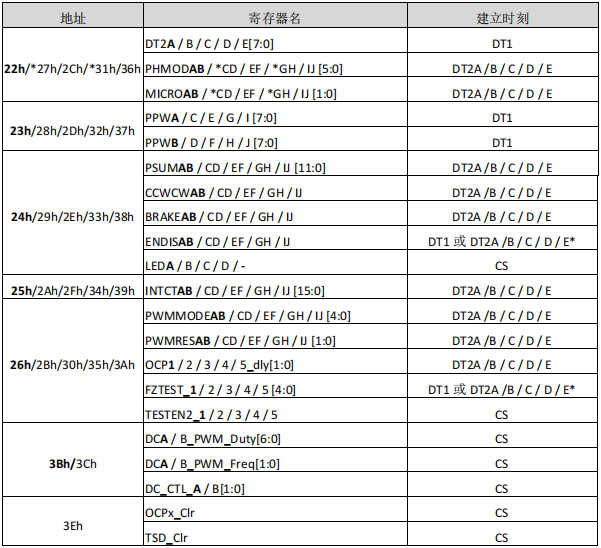
* 0→1:起作用于DT1:1→0:起作用于DT2x。
*注:27h、31h地址對應 的β通道、δ通道沒有細分選項(固定為256分頻)和相位矯正選項。27h、31h
地址的D15?D8需要固化為0。
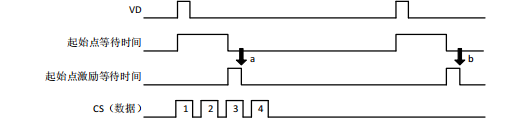
原則上來說,用于細分步進的寄存器的建立應該在起始點延時的這段時間段執行完(參考第19頁
圖)。在起始點延時這段時間外寫入的數據也能被存入寄存器。然而,如果寫操作在刷新時間后執行
的話,寫入的寄存器不會在計劃的時刻有效。舉例說明:如果在起始點激勵延時后更新的數據1?4如下
圖一樣被寫入,數據1和2在a時刻立即被更新,數據3和4在b時刻被更新。即使數據是連續寫入的,更
新的時間間隔了1個VD的周期。
由于上述原因,為了數據及時更新,寄存器數據的建立需要在起始點延時的這段時間段執行完。
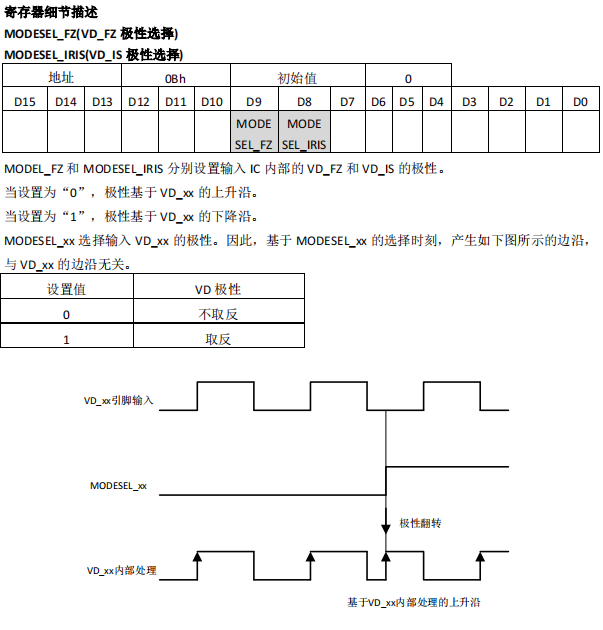
2. VD信號內部處理
這個系統中,步進電機的反射時間和旋轉時間分別基于VD_IS和VD_FZ的上升沿。VD_IS和VD_FZ的
極性能通過下面的寄存器設置。
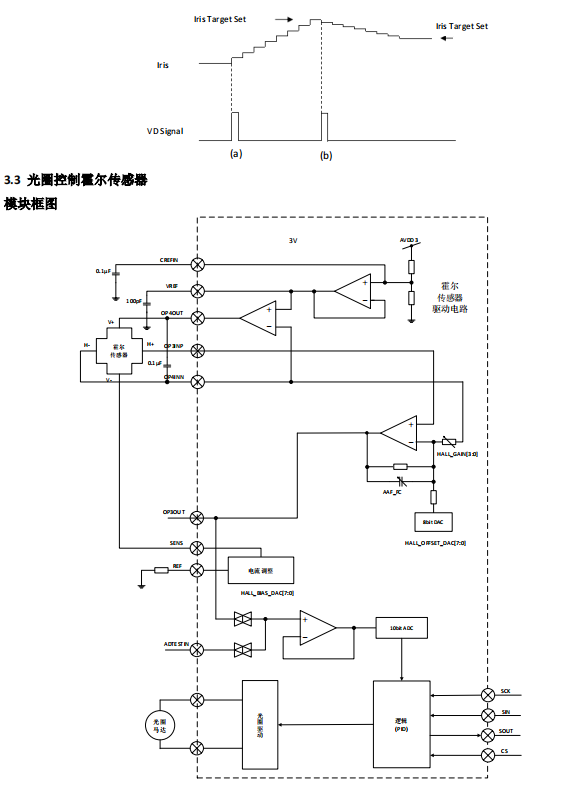
3. 光圈控制
3.1 特性
?PWM 波驅動→低功耗
?通過寄存器可以設置每個濾波器→低噪聲
?增益放大器周圍內置無源部件→對外置部分減幅
?內置 8 比特 DAC 用來調整霍爾補償
?內置電流 DAC 用來調整霍爾偏置電流
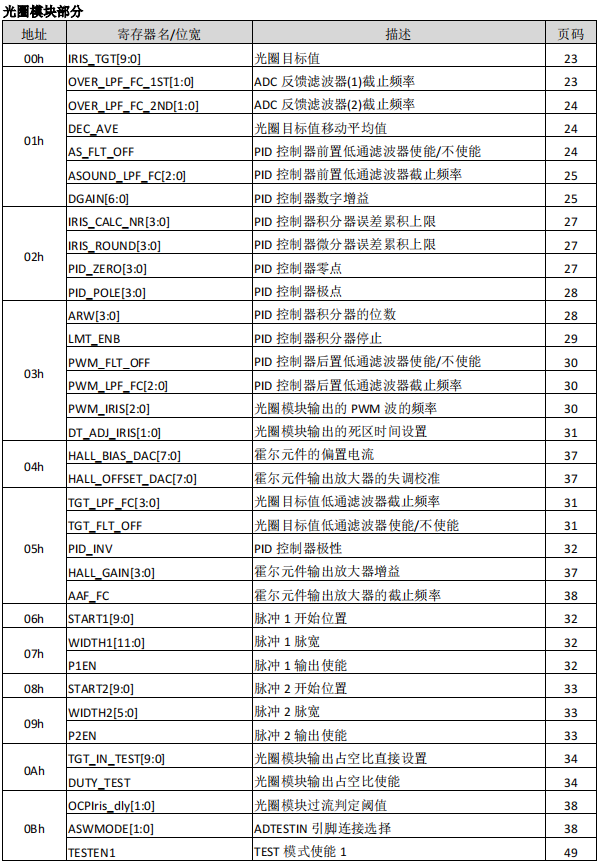
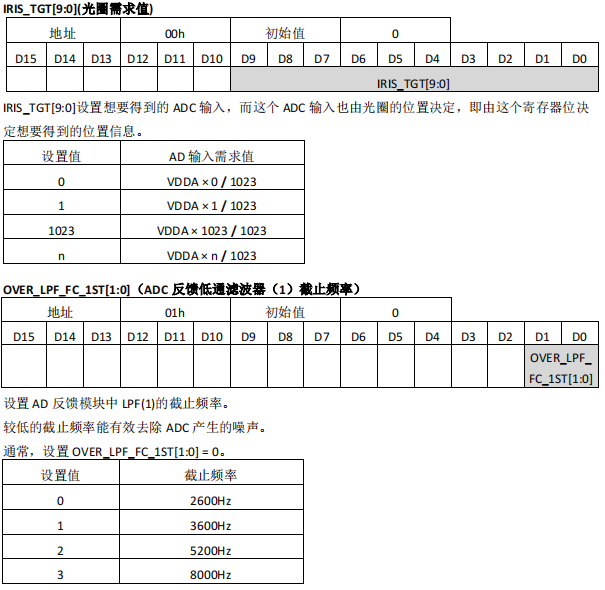
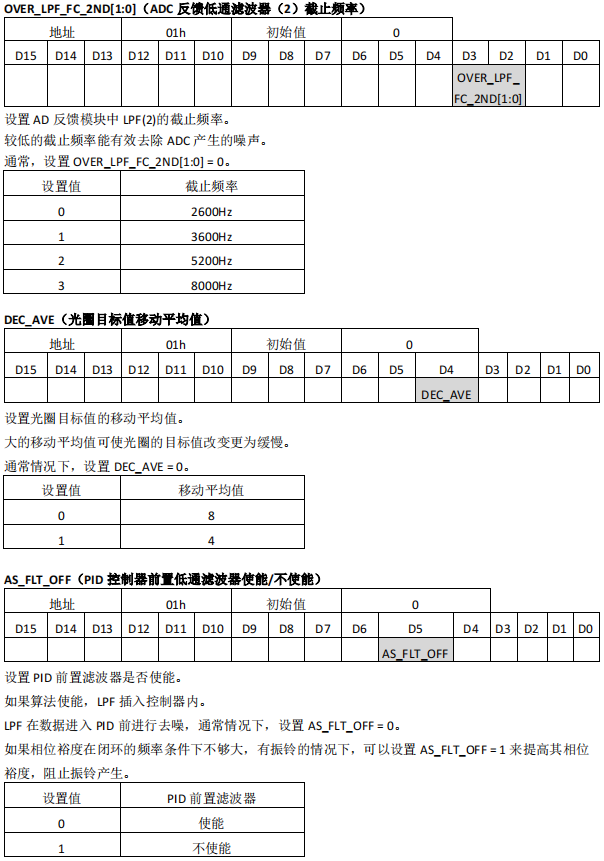
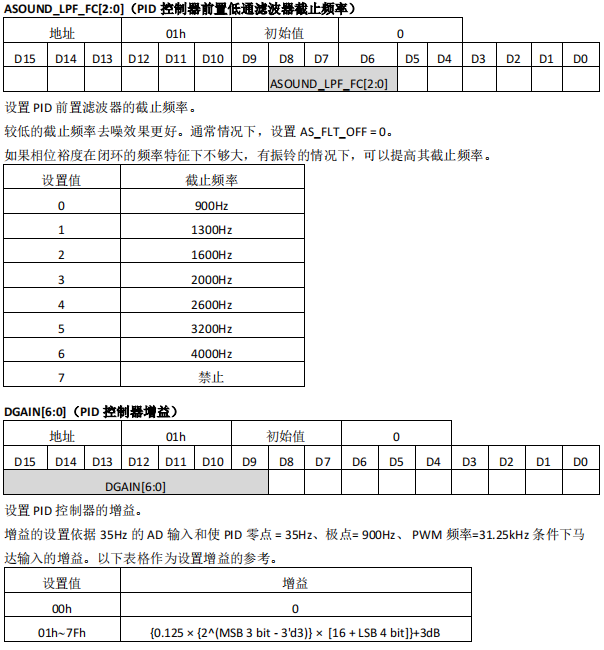
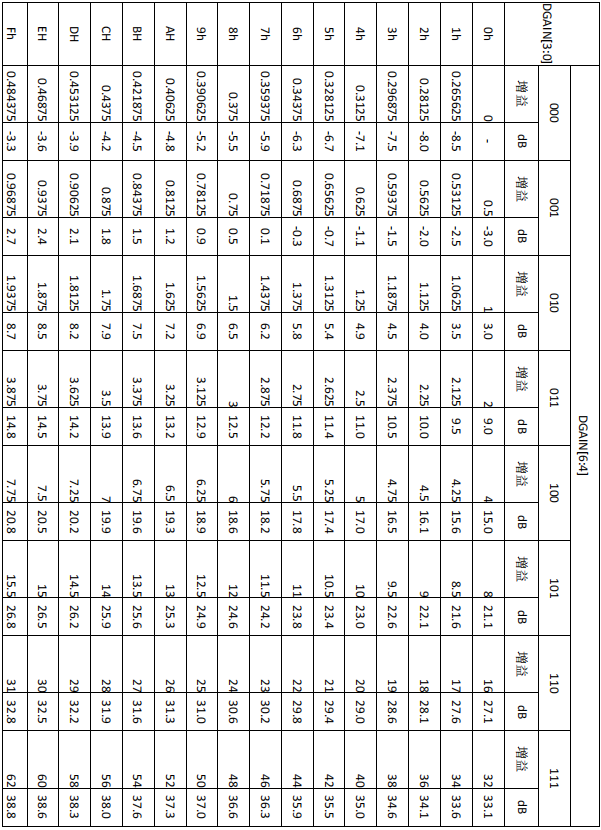
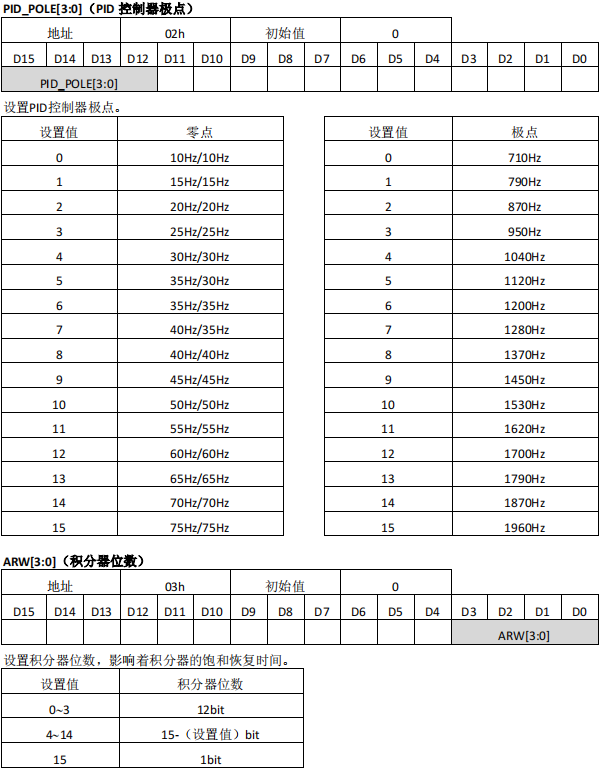
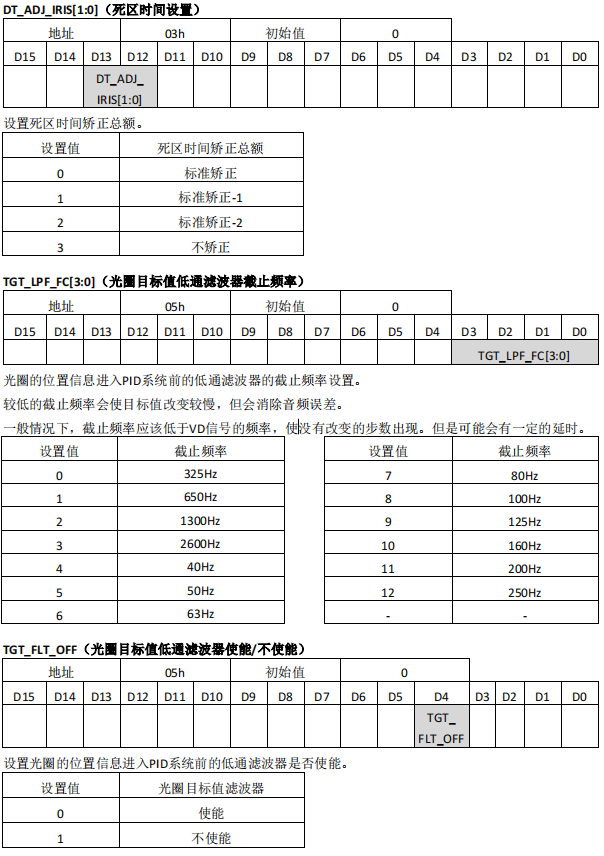
3.2 寄存器細節描述
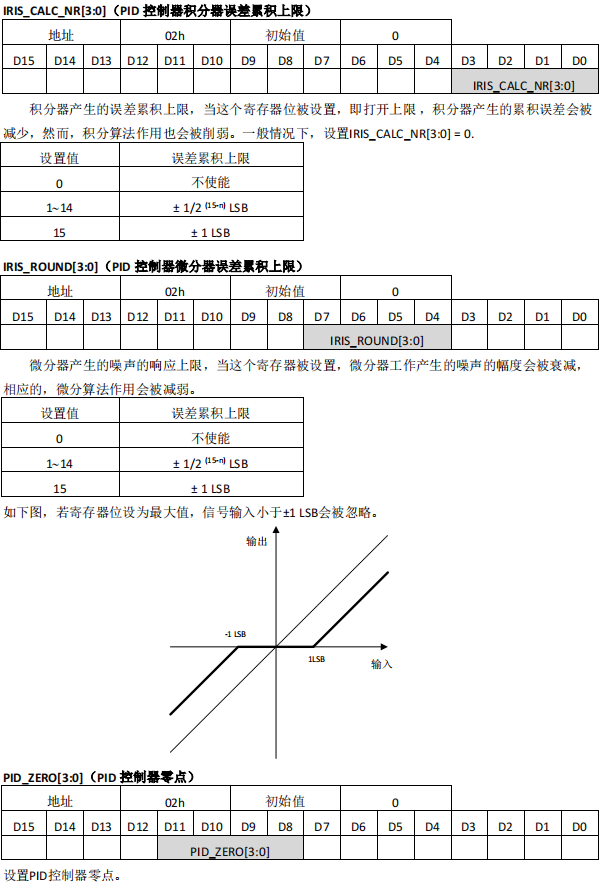
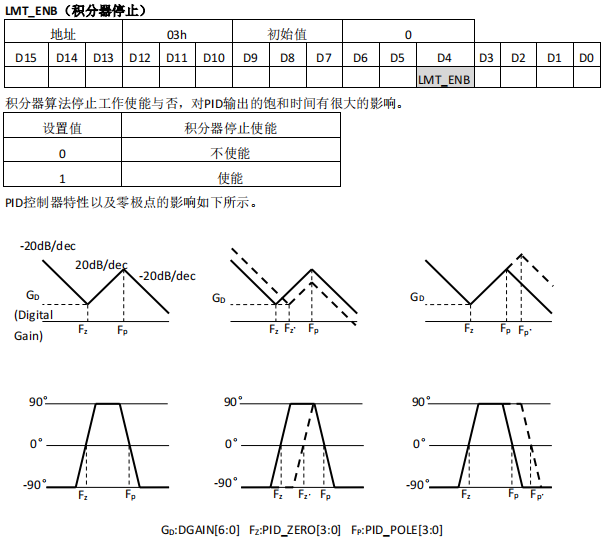
系統的極點位置主要影響系統幅度特性峰值的位置,系統的零點位置主要影響系統的幅度特性谷
值位置及下凹程度。積分器作用的強弱由零點位置決定,微分器作用的強弱由零極點位置共同作用。
零點位置越小,積分作用越強,積分作用使系統的穩定性下降。積分作用強時,系統會不穩定,但能
消除穩態誤差。微分作用由零極點共同作用,可以改善動態特性。微分作用偏大時,超調量較大,調
節時間較短。微分作用偏小時,超調量也較大,調節時間較長。只有設置參數合理時,才能使超調量
較小,減短調節時間。增益加大,使系統動作靈敏,速度加快,穩態誤差減少。增益偏大,振蕩次數
加多,超調時間加長。增益太大時,系統會趨于不穩定。增益太小時,又會使系統的動作緩慢。
一般情況下,對參數的選擇通常采用實驗湊試法,整體步驟為“先比例,再積分,最后微分”。
(1)整定增益控制:將增益控制作用由小變到大,觀察各次響應,直到得到響應快、超調小的響應曲
線。(2)整定積分環節:將步驟(1)中選擇的比例系數減小到原來的50%?80%,再調節零點使積分作用由
小到大,反復試湊得到較滿意的響應,確定比例和積分的相關參數。(3)若經過上述兩個步驟,動態過
程不能令人滿意,則將極點設置由小到大,同時相應地改變比例和零點,反復試湊得到滿意的控制效
果和相關參數。
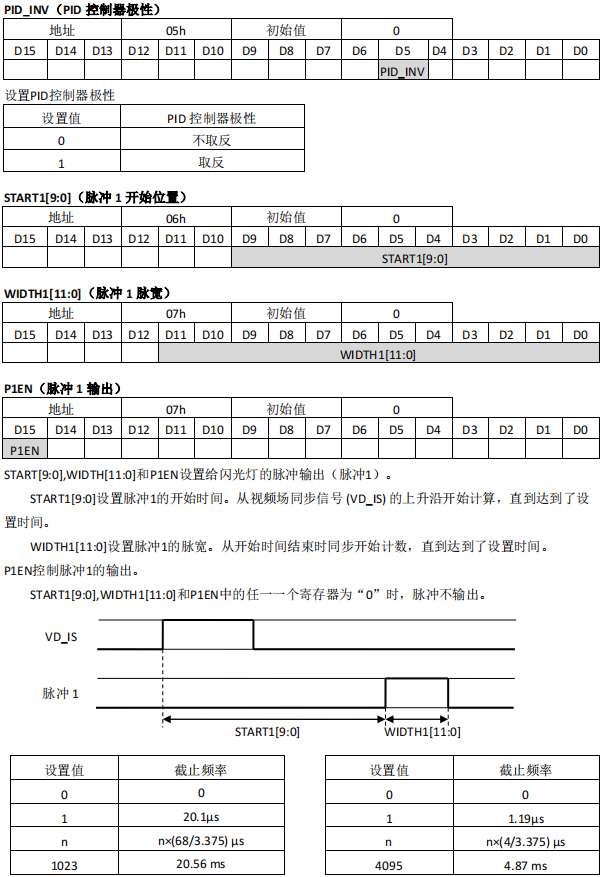
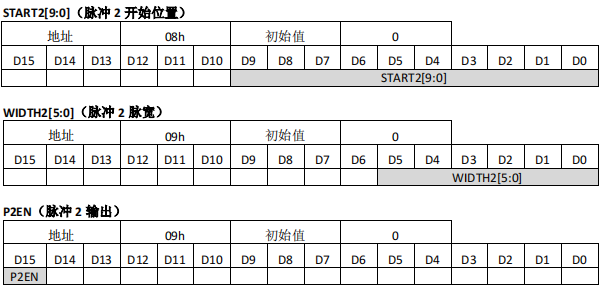
START2[9:0]、WIDTH2[5:0]和P2EN設置給光圈用來完全關斷的脈沖輸出(脈沖2)。
注:PID工作時不能有脈沖2。
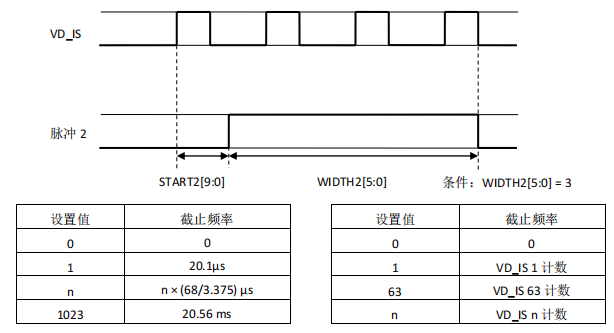
START2[9:0]設置脈沖2的開始時間。從視頻場同步信號 (VD_IS) 的上升沿開始計算,直到達到了設
置時間。
WIDTH2[5:0]設置脈沖2的脈寬。這個設置在開始時間計數結束后開始執行,出現上升沿。經過了
計數值個VD_IS的上升沿個數后,在VD_IS的下降沿結束。
P2EN控制脈沖2的輸出。
START2[9:0]、WIDTH2[5:0]和P2EN中的任一一個寄存器為“0”時,脈沖不輸出。同時,計數時,
START2和WIDTH2不更新。

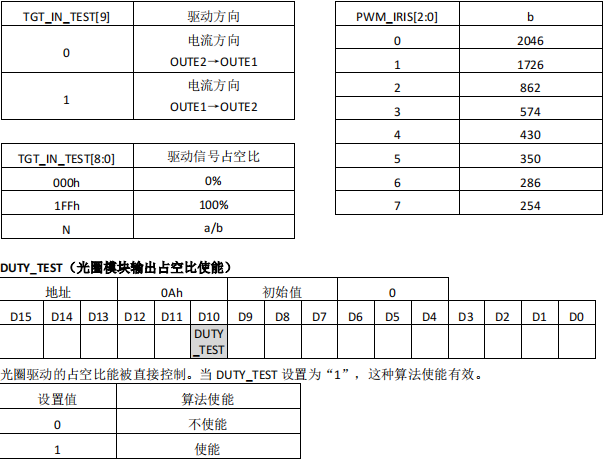
光圈模塊輸出驅動信號的占空比能被直接控制。DUTY_TEST必須為“1”才能使算法使能。
TGT_IN_TEST[9]設置光圈輸出模塊的轉動方向。TGT_IN_TEST[8:0]設置光圈輸出模塊的驅動占空比。
計算占空比的方法
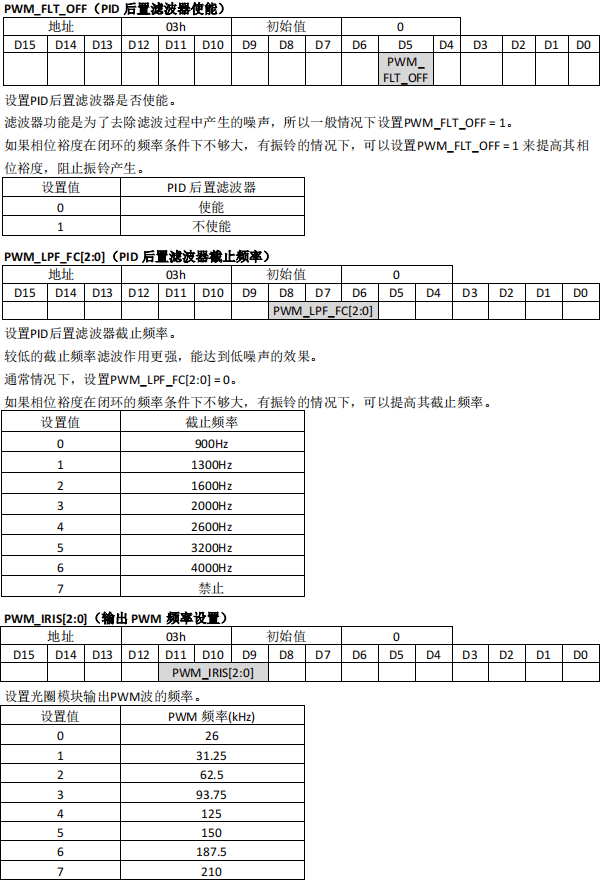
驅動信號占空比與 PWM_IRIS[2:0] 的設置值有關。
a 的計算方法是 a = {TGT_IN_TEST[8:1], 2’b00, TGT_IN_TEST[0]} (11位2進制數)
b 如上面的表格所示和PWM_IRIS[2:0]有關
占空比由計算a/b得到。如果a/b>1,占空比是100%。
舉例說明:當TGT_IN_TEST[8:0] = 80h,PWM_IRIS[2:0] = 2,
a = {40h, 2’b00, 1’b0} = 200h
a/b = 200h / 862 =0.59
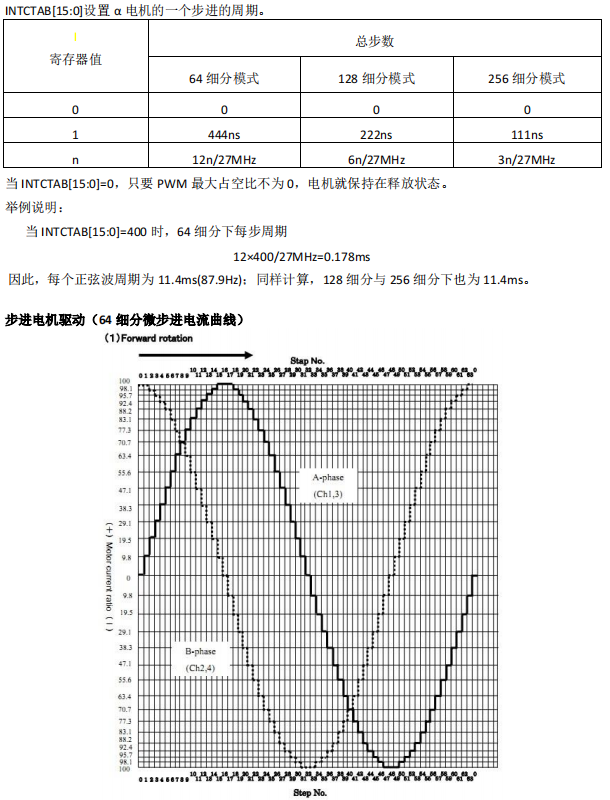
舉例說明:
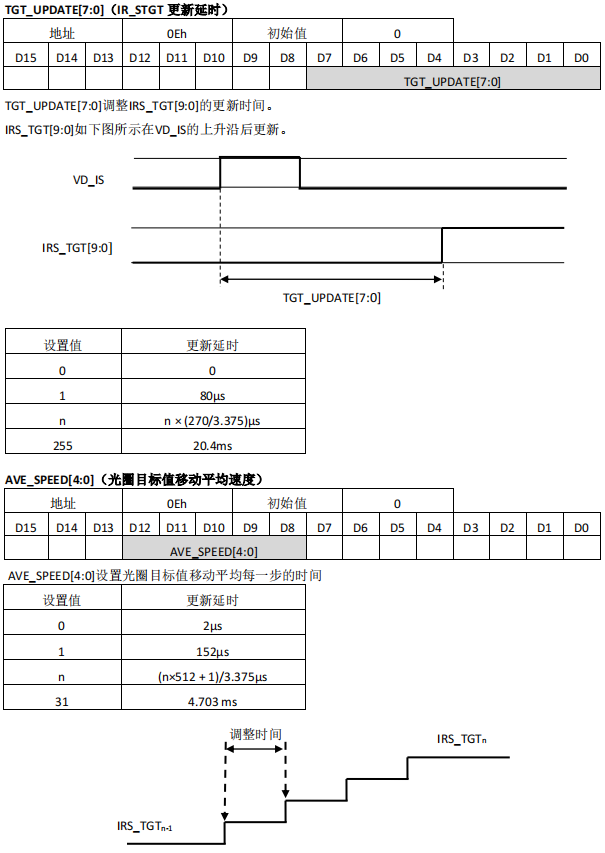
設置AVE_SPEED[4:0]使得數據更新的速度和VD信號的周期基本相同。
如果VD = 60Hz,那么在8步調節的情況下,每一步的時間即 1 / (60Hz) / 8 = 2.08ms
參考表格,根據AVE_SPEED[4:0]的值,每一步的時間可設置為2.12ms,所以光圈每隔17.0ms改變一次。
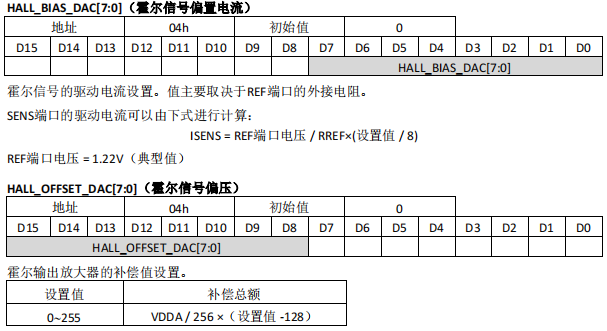
偏置電流和偏壓調整的方法如下:
1. 霍爾信號偏置電流設置。
2. 一旦失調電壓被設置為 0(設置值為:80h),輸出 OP3OUT 被調整(反饋到 10bit ADC)。
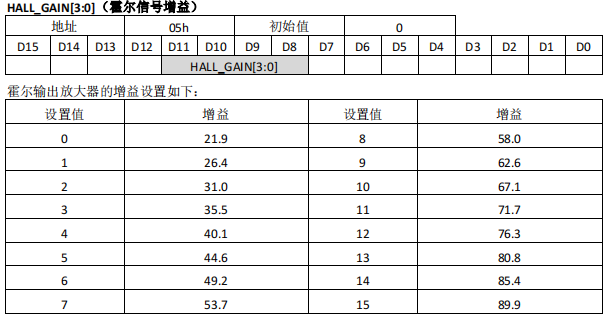
a ) 調整霍爾增益 (HALL_GAIN[3:0]) ,使得 OP3OUT 的輸出在光圈完全打開和完全關斷的范圍內,接近
于目標值范圍。
舉例說明:當目標值 VDDD = 3.0V,完全打開 = 0.2V,完全關閉 = 2.8V;
調整霍爾增益(HALL_GAIN[3:0]),使得 OP3OUT 端口的輸出范圍接近于:2.8V - 0.2V = 2.6V。
b) 調整偏置電流,使得輸出范圍接近于目標值范圍。
c) 調整失調電壓,使得 OP3OUT 的輸出接近于目標值范圍。
b 和 c 能分別執行。
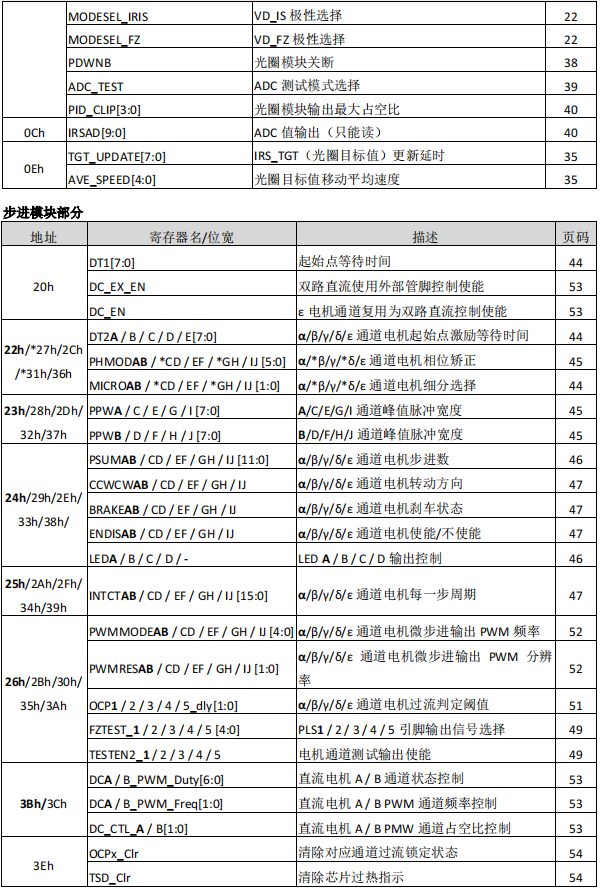
這個模塊是一個用于聚焦和放大的步進電機驅動。下面的一些設置可以用來執行一系列的控制。
(下面是對 α 電機:驅動器 A/B 的描述。驅動器 C/D,E/F,G/H,I/J 和 α 電機執行一樣的算法)。
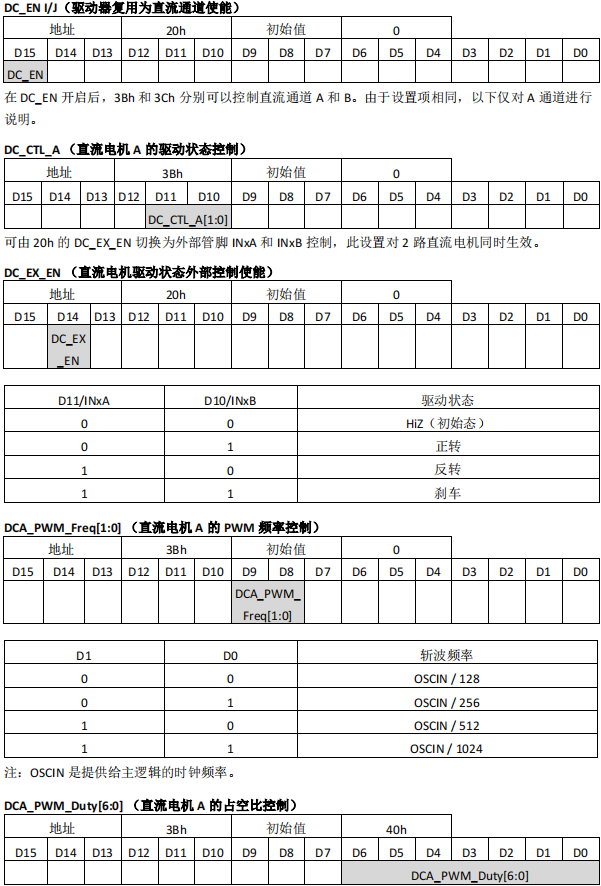
其中,驅動器 I/J 可由 20h 的 DC_EN 復用為 2 路直流電機通道。
主要的設置參數:
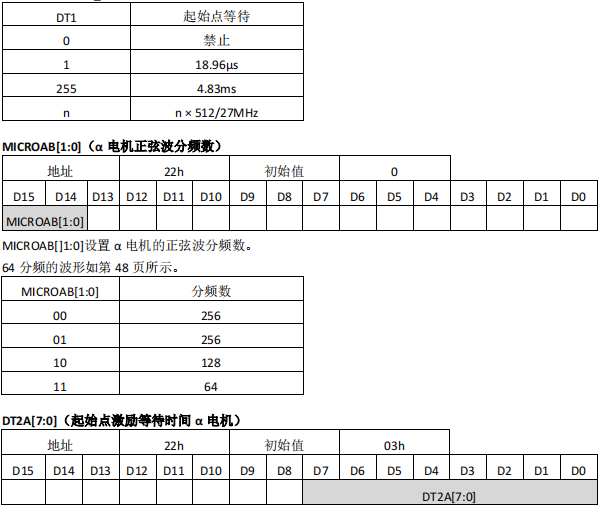
1)微步進分頻數 MICROAB[1:0]:微步數能設置成 64、128 和 256 微步進模式。
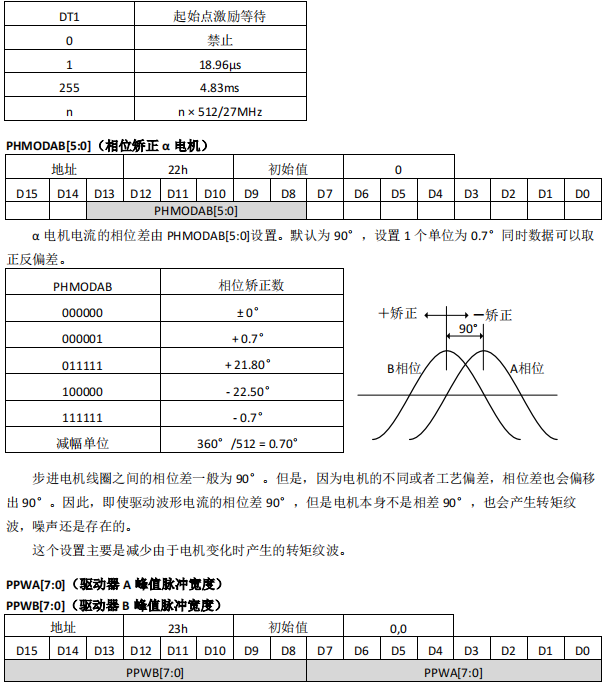
2)相位矯正 PHMODAB[5:0]:驅動器 A 和驅動器 B 的相位差目標在 90°;可以做-22.5°到 +21.8°的相位
修正。
3)起始點激勵延時 DT2A[7:0]:更新數據時間設置。
4)幅度設置 PPWA[7:0],PPWB[7:0]:獨立設置驅動器 A/B 的負載驅動電流。
5)步進數設置 PSUMAB[11:0]:步進電機步進數。
6)步進周期 INTCTAB[15:0]:電機旋轉速度設置;電機旋轉速度與正弦波的的微步進模式無關。
7)PWM 頻率 PWMMODEAB[4:0],PWMRESAB[1:0]:驅動器輸出的 PWM 波頻率設置
8)觀察項 FZTEST_1[4:0]:設置 PLS1 的輸出項。
9)過流。
10)其他。
4.2 相關設置的建立時刻
建立時刻和相關時間如下所示。

地址 27h 到 2Bh,2Ch 到 30h,31h 到 35h,36h 到 3Ah 的設置同 22h 到 26h 的設置相同,所以
27h 到 3Ah 的描述省略。如果相關寄存器被刷新,則每一個 VD 周期來到時,會實現一次設置的加載
刷新。當同樣的設置被執行超過 2 個 VD 脈沖時,沒有必要在每個 VD 脈沖都寫入寄存器數據。
DT1[7:0](起始點等待時間,地址 20h)
更新數據時間設置。5 個步進通道共用設置。在系統硬件復位后(39 引腳 RSTB:低→高),開始
激勵和驅動電機前(DT1 結束)這段時間內,必須設置此項。
由于這個設置在每次 VD 脈沖來到時更新,沒有必要一定在起始點等待時間內寫入。
DT2A[7:0](起始點激勵等待時間,地址 22h)
更新數據時間設置。復位后(39 引腳 RSTB:低→高),需要在開始激勵和驅動電機前被設置執行
(DT1 結束)。
MICROAB[1:0](正弦波分頻數,地址 22h)
設置正弦波的分頻數。這個設置不改變轉動次數和轉動速度。
只有當轉速達不到要求時,才需要設置此項。復位后(39 引腳 RSTB:低→高),設置有效。
PHMODAB[5:0](相位矯正,地址 22h)
通過矯正線圈 A 和 B 的相位差,驅動器產生的噪聲會減少。合適的相位矯正必須依據于電機的旋
轉方向和速度,此設置需要隨著旋轉方向 (CCWCWAB) 或者旋轉速度 (INTCTABA) 的變化而改變。
PPWA[7:0], PPWB[7:0](峰值脈沖寬度,地址 23h)
設置 PWM 最大占空比。設置需要在開始激勵和驅動電機前被設置執行(DT1 結束)。
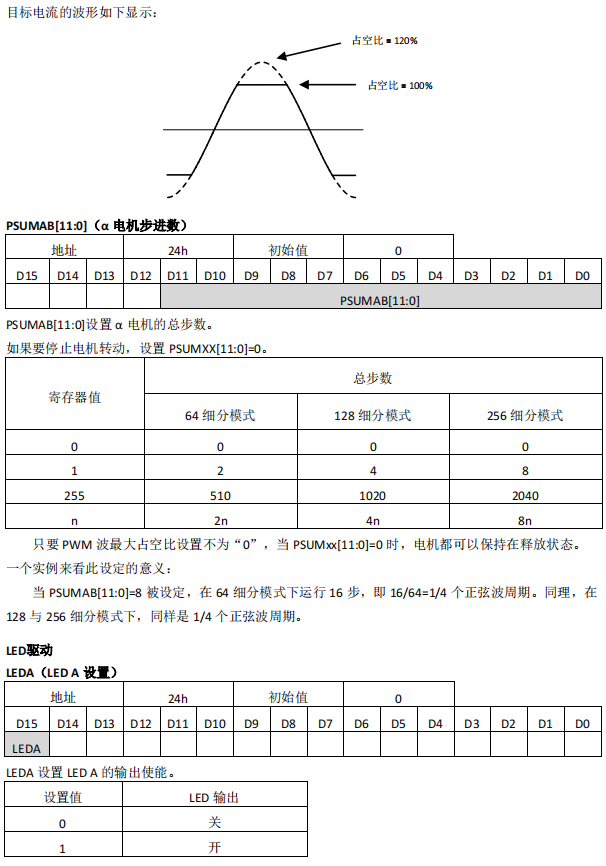
PSUMAB[11:0](步進電機步進數,地址 24h)
1 個 VD 的時間間隔內的電機的轉動次數設置。
每次 VD 脈沖輸入時,電機轉動所設置的次數。因此,設置次數為“0”是可以停止電機的轉動。
當設置的轉動次數總額超過了 1 個 VD 脈沖的時間,超出部分會被取消。
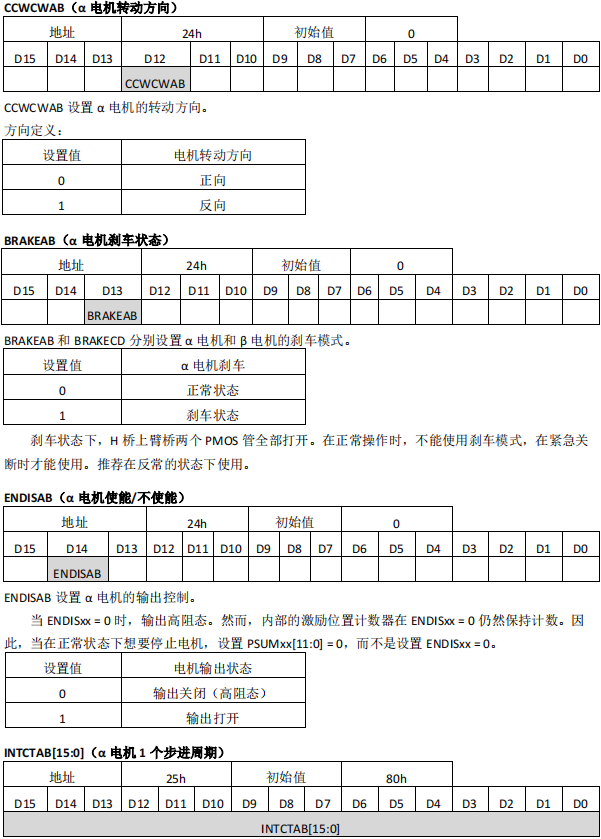
CCWCWAB(轉動方向,地址 24h)
電機轉動方向設置。只要在選擇轉動方向前設置即可。
BRAKEAB(電機剎車設置,地址 24h)
剎車時設置電流為 0。 由于執行此設置時,很難得到電機的最終位置,所以此設置一般用于立即
停止電機。
ENDISAB(電機工作使能/不使能,地址 24h)
設置電機工作使能。當設置為不使能時,電機引腳輸出高阻態,電機正在轉動時不要設置成不是
使能。
LEDA(LED 設置,地址 24h)
LED 開/關設置。在 CS 的下降沿被設置。可以認為和電機驅動無關,能實現開/關的獨立設置。
INTCTAB[15:0](脈沖周期,地址 25h)
脈沖周期設置。轉動速度決定于這個設置。
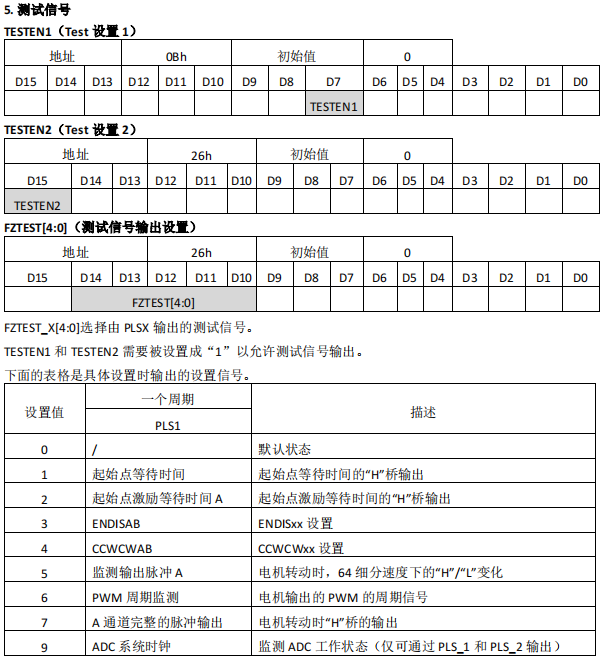
TESTEN2_1(電機通道測試輸出使能,地址 26h)
PLS1 輸出使能,需要配合 TESTEN1 使用
FZTEST_1[4:0](PLS1 引腳輸出信號選擇,地址 26h)
PLS1 引腳輸出信號選擇。
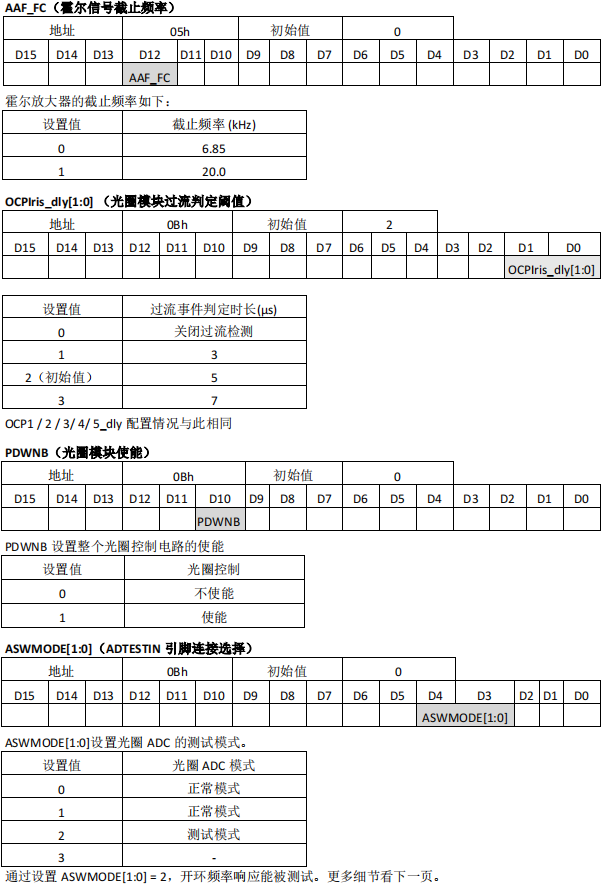
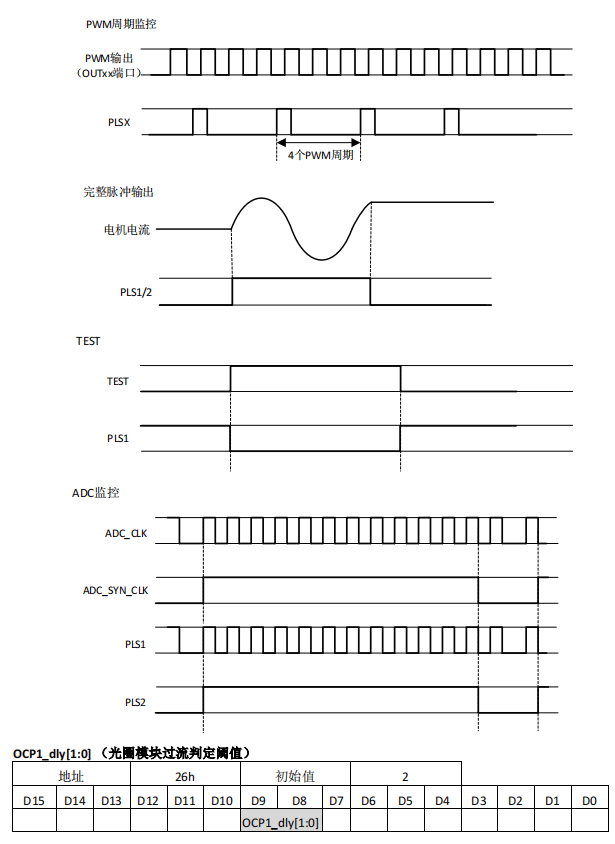
OCP1_dly[1:0](光圈模塊過流判定時長,地址 26h)
過流事件判定時長設置,同 OCPIris_dly[1:0]。
PWMMODEAB[4:0], PWMRESAB[1:0](微步進輸出 PWM 波頻率,地址 26h)
設置微步進輸出 PWM 波頻率。需要在開始激勵和驅動電機前設置執行(DT1 結束)。
4.3 步進電機微步驅動時,如何調整寄存器值
為了控制鏡頭,需要在每個 VD 都要求設置電機轉動次數和轉動速度。相關設置的轉動次數和速
度的寄存器為:
INTCTxx[15:0]:設置每一步的時間(相應的,即轉動速度)
PSUMxx[11:0]:每個 VD 時段內轉動總步數
當在連續的 VD 時段內持續驅動電機,需要設置持續轉動時間以適應 VD 周期。
以下是電機轉動時,計算 INTCTxx[15:0]和 PSUMxx[11:0]的方法:
1) 計算 INTCTxx[15:0](決定電機轉動速度)
INTCTxx[15:0] × 768 = OSCIN 頻率 / 轉動頻率
2) 由 INCTxx[15:0]計算 PSUMxx[11:0]。不能單單看 PSUMxx[11:0]的值。
下面的等式成立時,持續轉動時間和 VD 時間相同,電機實現均勻轉動
INTCTxx[15:0] × PSUMxx[11:0] × 24 = OSCIN 頻率 / VD 頻率
3) PSUMxx[11:0]設置完成后,由上式重新計算 INTCTxx[15:0]
舉例說明,OSCIN 頻率 = 27MHz,VD 頻率 = 60Hz
計算 PSUMxx[11:0]和 INTCTxx[15:0],使電機在 800pps(1-2 相位)轉動
800pps = 100Hz,所以
INTCTxx[15:0] = 27MHz / (100Hz × 768) =352
相應的
PSUMxx[11:0] = 1/(60Hz)× 27MHz/ (352 × 24) = 53
重新計算 INTCTxx[15:0]得:
INTCTxx[15:0] = 1/(60Hz)× 27MHz/ (53 × 24) = 354
可以通過查看第 46 頁和第 47 頁來查看更多細節。
如果上述 2)中等式左邊比右側小,那么轉動時間比 VD 周期小且會引起不連續的轉動。反之,超
過 VD 周期的轉動會被取消。

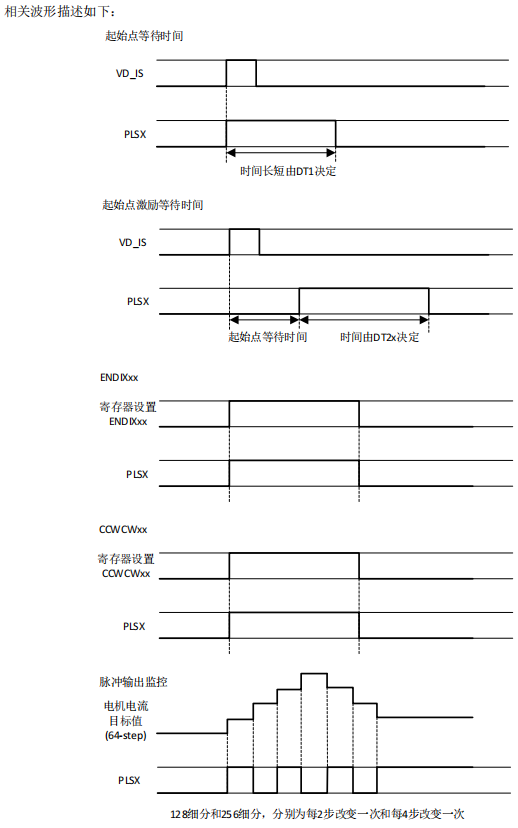
DT1[7:0]設置數據寫入系統的延時時間(起始點等待時間)。
電機可以精確地在起始點等待時間從“1”到“0”翻轉后被激活。起始點等待時間從視頻同步信
號(VD_FZ)的上升沿開始計算。
由于起始點延時時間是主要是用來等待串行數據的寫入。應該設置寄存器值大于“0”,如果是
“0”的話,相應的數據不能更新。
參考第 19 頁 VD_FZ 和起始點等待時間的關系。
DT2A[7:0]設置 α 電機開始轉動前的等待延遲時間。
電機在起始點激勵等待時間從“1”到“0”翻轉后開始轉動。起始點激勵等待時間是在起始點等
待時間結束時刻開始計算。
這個信號是 AB 通道的單獨延遲。應該設置寄存器值大于“0”,如果是“0”的話,相應的數據
不能更新。
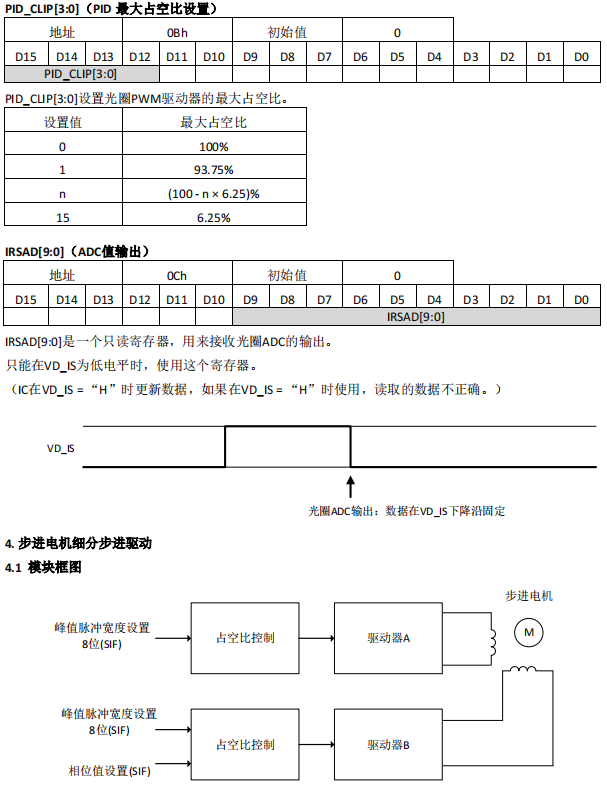
PPWA[7:0]到 PPWD[7:0]設置 PWM 波的最大占空比,決定了驅動器 A 到 D 輸出電流峰值的位置。
最大占空比由下式進行計算:
驅動器 X 最大占空比 = PPWx/ (PWMMODE × 8)
當 PPWx = 0,線圈電流為 0。
舉例, 當 PPWA[7:0] = 200,PWMMODE[4:0] = 28,最大占空比為:200 / (28 × 8)= 0.89。
根據 PWMMODE 和 PPWx 的值,最大占空比可能超過 100%。
當然 PWM 中占空比不可能超過 100% ,正弦波峰值點會被削去如下圖所示。
舉例說明,當 PWMMODE = 10,PPWx = 96,最大占空比 = 90/(10 × 8)= 120%。
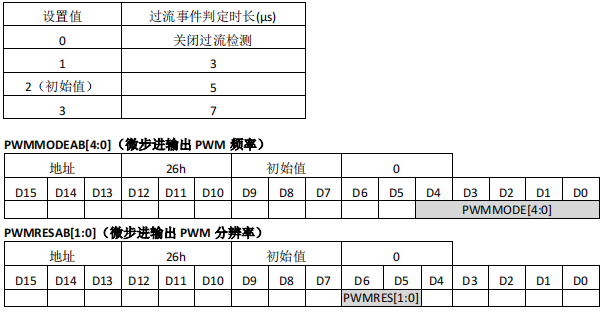
PWMMODEAB[4:0]通過設置系統時鐘 OSCIN 的分頻數來設置微步進輸出 PWM 的頻率。
PWMMODEAB[4:0]能在 1?31 的范圍內設置,PWM 頻率在 PWMMODEAB = 0 和 PWMMODAB = 1 時
候的取值是一樣的。
PWMRESAB[1:0]設置由 PWMMODEAB[4:0]決定的頻率的分頻數。
PWM 頻率由下面的式子進行計算:
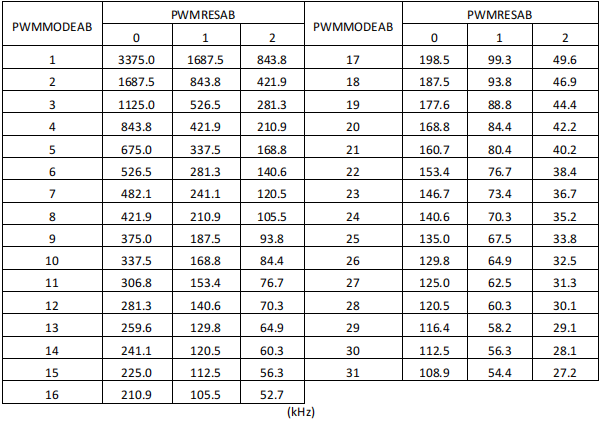
PWM 頻率 = OSCIN 頻率 / ((PWMMODEAB × 2 3 ) × 2 PWMRESAB)
OSCIN = 27MHz 時,PWM 的頻率如下表
輸入引腳的輸入電容
輸入引腳的電容值為 10pF 或者更小。
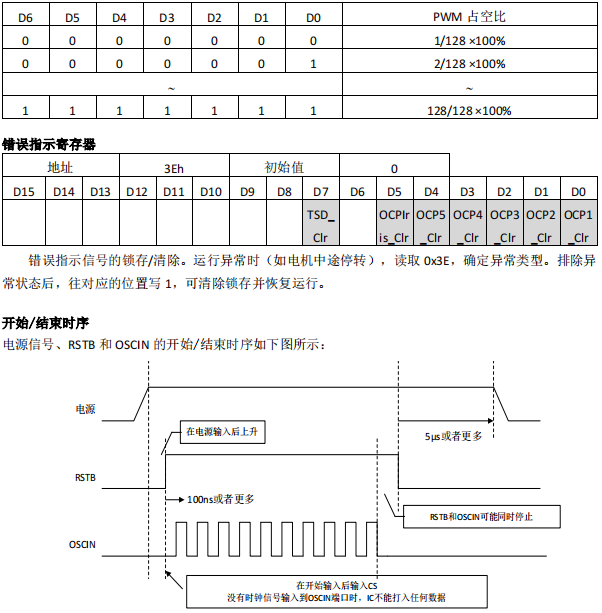
OSCIN 和 VD 信號的時刻
一旦 VD 信號(VD_FX 或者 VD_IS 輸入)和 OSCIN 同步,那么 VD 信號和 OSCIN 信號對輸入時刻沒
有約束。
掉電模式
當 PDWNB = 0,掉電模式被設置。掉電模式下,光圈模擬部分的電路停止工作(電機驅動不受影
響)。當只有電機驅動在使用時,設置 PDWNB 為“0”可以減少功耗。
掉電模式下,相關引腳的操作如下:
典型應用圖
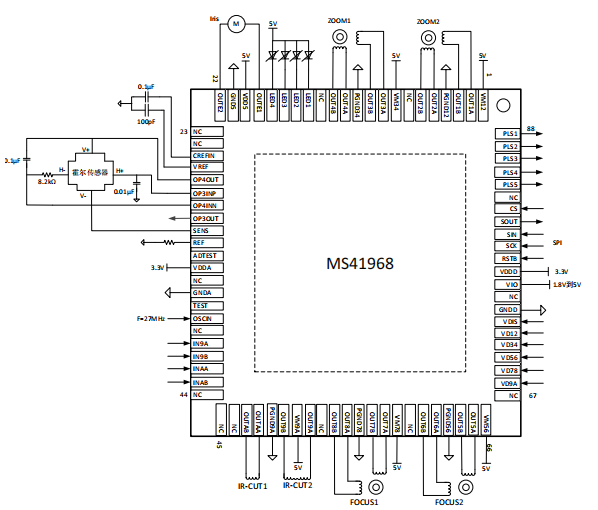
注:VIO 給數字輸入腳供電,輸入邏輯電壓不要超過 VIO。
VDDA 與 VDDD 需要接一起,可以接 2.7V?5V 電源。另外,需要保證 VMxx 電壓大于等于 VDDA 的
電壓。
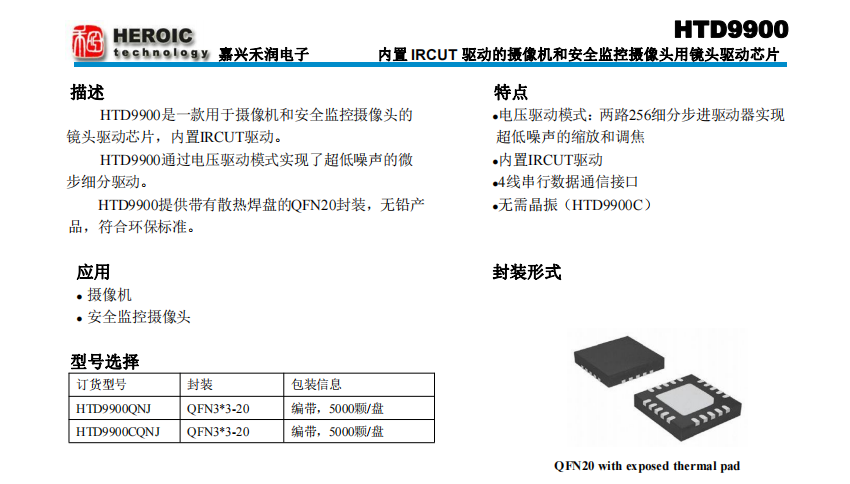
封裝外形圖
QFN88
——愛研究芯片的小王
審核編輯 黃宇
-
多通道
+關注
關注
0文章
101瀏覽量
28283 -
驅動芯片
+關注
關注
13文章
1379瀏覽量
55967
發布評論請先 登錄
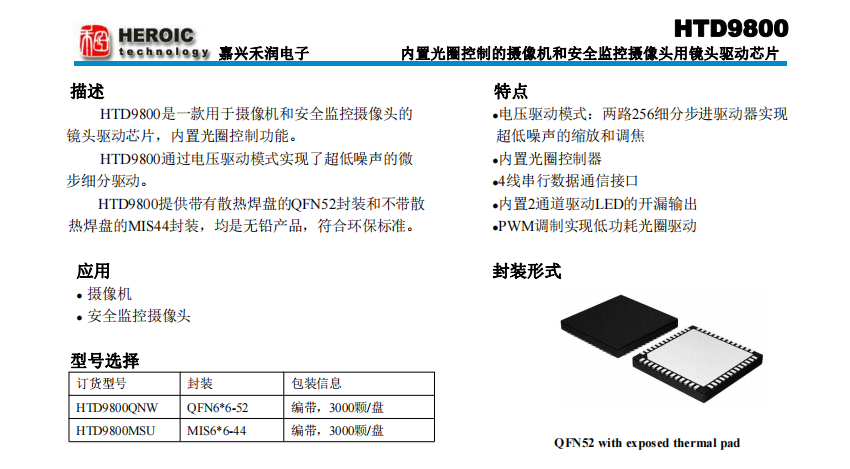
HTD9800內置光圈控制的攝像機和安全監控攝像頭用鏡頭驅動芯片中文手冊
HTD9900內置IRCUT驅動的攝像機和安全監控攝像頭用鏡頭驅動芯片
HTD9800 內置光圈控制的攝像機和安全監控攝像頭用鏡頭驅動芯片
MS41949——四通道、超低噪聲、256 細分、低壓 5V、微步進電機驅動
MS31051S/D——低壓 5V DC 電機驅動

MS3111S——低壓 5V DC 電機驅動

MS39233——低壓三個半橋驅動器
MS41929——雙通道超低噪聲 256 細分微步進低壓電機驅動
MS41919——雙通道超低噪聲 256 細分微步進低壓電機驅動






 工商網監
工商網監
評論