 手把手教你搭建OpenScenario交通場景(下)
手把手教你搭建OpenScenario交通場景(下)
在《手把手教你搭建OpenScenario交通場景(上)》中,我們已經介紹,在動力學仿真軟件ModelBase中對車輛、行人、物體和RSU四類實體進行創建后,實體的名稱將根據各自類型出現在編輯器左上位置的實體列表中進行顯示,并可用于通過點擊在編輯器中實現快速查找。
模型庫
包括車輛模型和駕駛員模型兩部分,其中,關于車輛模型部分,列表中不同的模型將在軟件運行動畫界面中顯示不同樣式,并且支持對車輛中心和邊界框等外觀參數進行編輯;而駕駛員模型部分,則可對體現其駕駛風格的如舒適加/減速度,最小換道距離,超車渴望度等各類參數,是否遵守交通規則等特征進行設置,或對駕駛員模型進行新建或刪除。


隨機交通
可用于設置場景中是否開啟隨機交通流功能,在功能開啟后可選擇周邊待生成隨機交通車輛的中心實體,設置生成車輛的范圍區域、最大數量、類型占比和最大期望速度等信息。如下圖所示,隨機交通車只生成在圖中的暗灰色區域,當隨機車輛跑出橢圓區域則會被自動消除,圖中橢圓區域的車輛繼續行駛。場景中的所有隨機車輛均處于自動駕駛模型,車輛采用隨機終點。


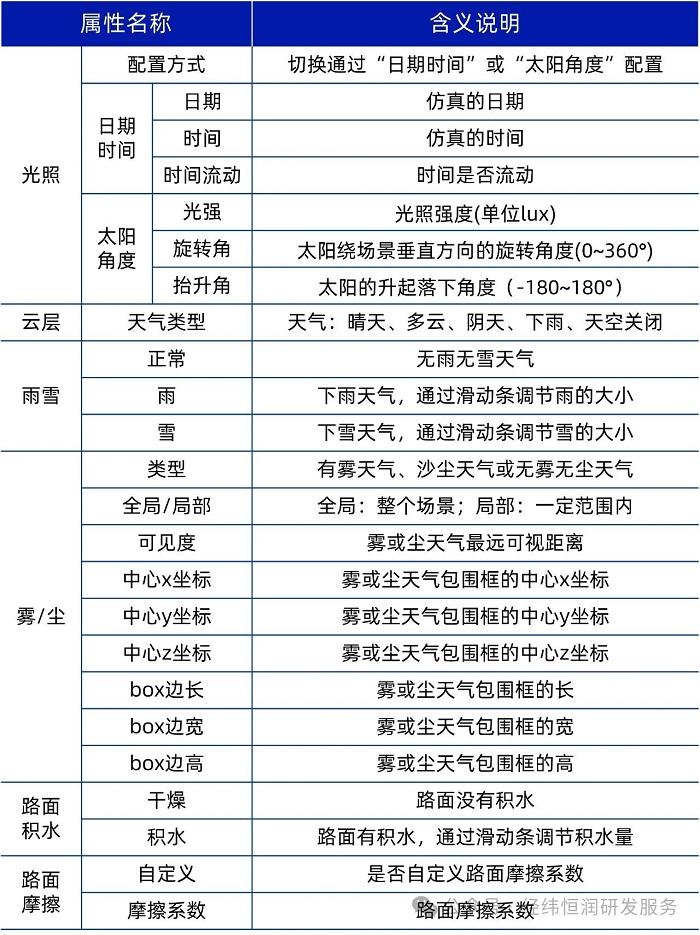
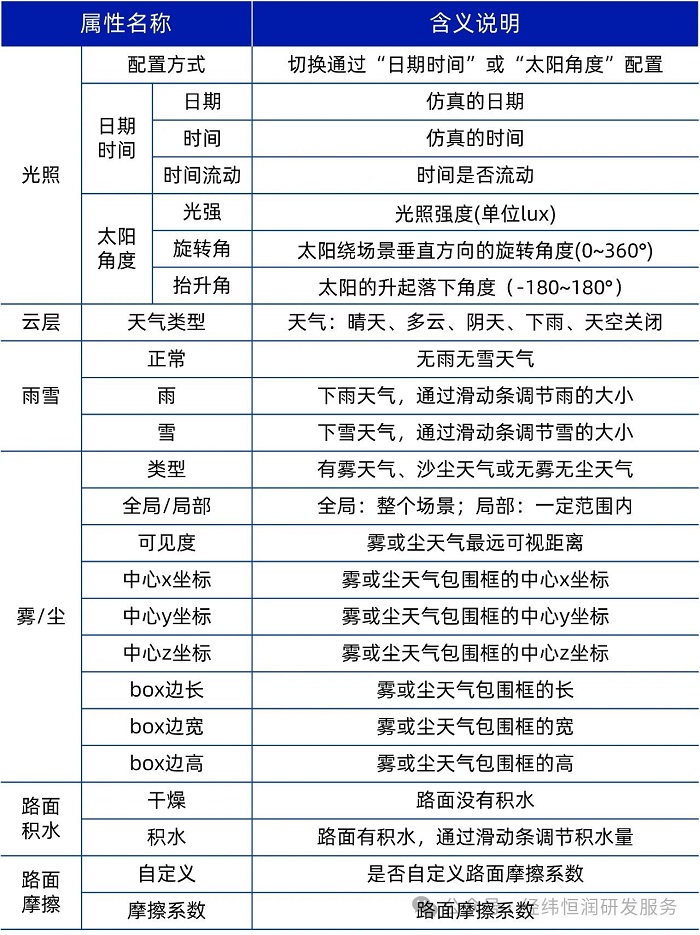
環境配置
可用于配置場景運行時的環境參數,支持對光照、云層和晴雨雪霧塵天氣變化,以及路面積水情況進行模擬,并實現運行動畫中的顯示效果,在環境配置界面中可供修改的參數及其含義如下表所示:
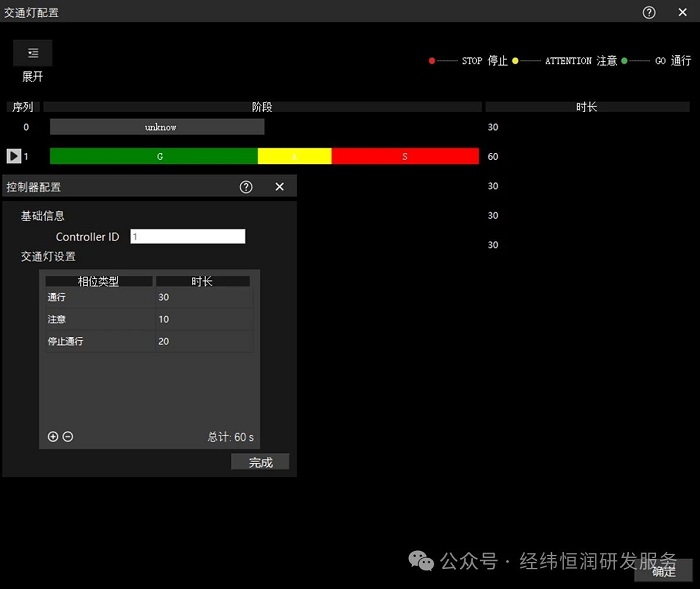
交通燈配置
在通過道路編輯器進行交通燈添加并與控制器綁定的基礎上,在配置界面中能夠以每個控制器為單元對交通燈相位總時長,各色交通燈(包括通行--綠色、注意--黃色、停止通行--紅色)相位時長占比進行設置,來作為車輛通過各個交叉路口的交通準則。

SCP編輯
SCP指令是通過發送指令的方式控制仿真運行過程中實體的行為。在SCP編輯界面,點擊“生成”按鈕,可生成勾選框所對應的SCP指令。運行時點擊“發送”可將文本框中的指令發送至后端執行。點擊“重置”按鈕可取消所有勾選并清空輸入框。
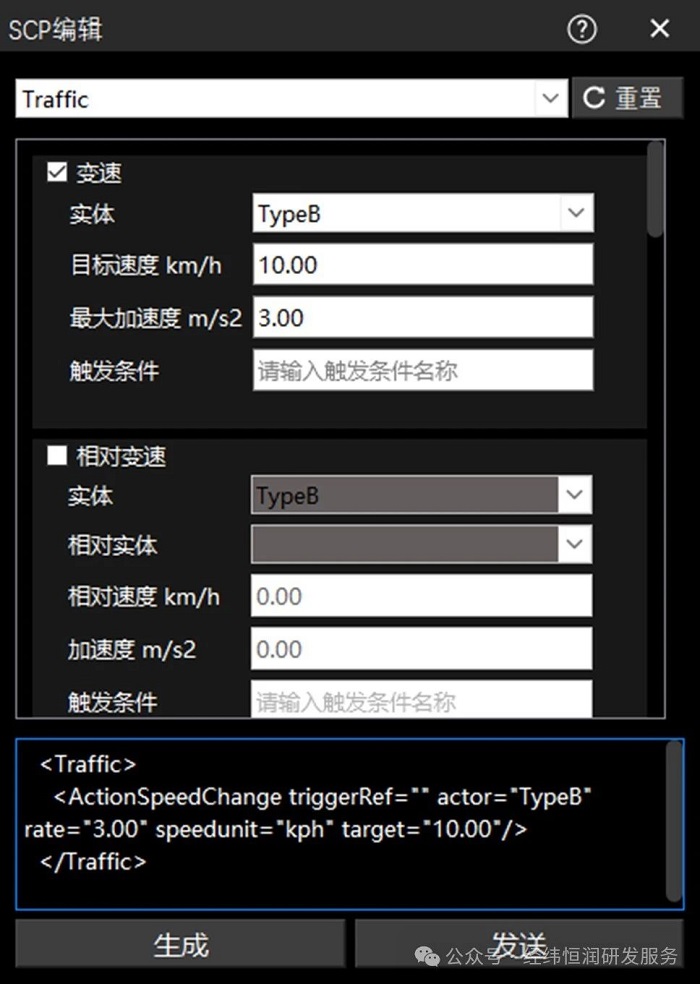
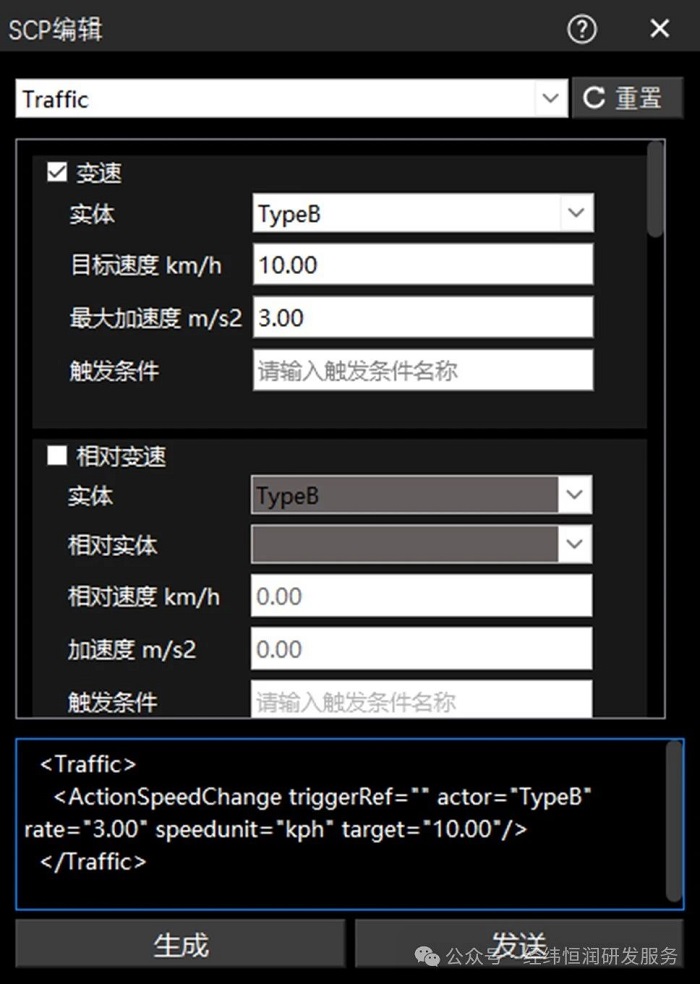
SCP指令采用了xml的格式,通過節點名稱來確定指令的內容,通過節點中的參數確定指令的詳細內容。SCP主要包括七類控制指令:交通行為指令(Traffic)、實體控制指令(Player)、環境控制指令(EnvironmentAction)、交通燈控制指令(TrafficLight)、設置參數指令(Set)、動畫控制指令(Animator)、接口指令(API)。通過靈活運用各種SCP指令可以搭建更豐富的場景,測試更復雜的功能。
另外,通過點擊“生成”按鈕來生成的SCP指令也可以復制粘貼到車輛行為設置-觸發條件及行為界面中,作為上述以SCP形式進行車輛行為設置的代碼內容來使用。
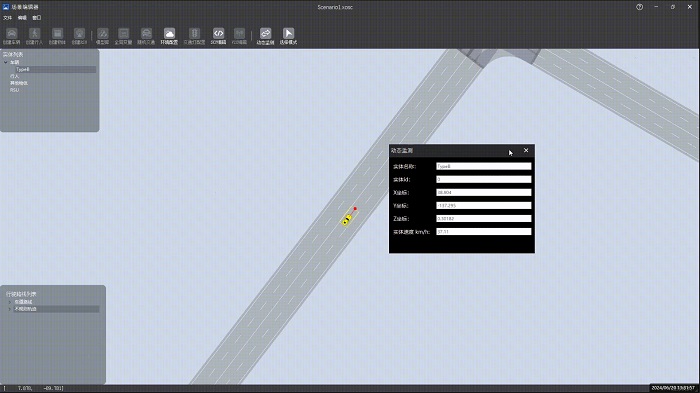
動態監測
動態監測界面可以監測實體在運行時的實時數據,在運行狀態時,選中實體,打開動態監測界面,界面中會實時顯示該實體的動態參數。各參數的含義如下:
- 實體名稱:選中實體的名稱
- 實體id:選中實體的id
- X坐標:選中實體的X坐標
- Y坐標:選中實體的Y坐標
- Z坐標:選中實體的Z坐標
- 實體速度km/h:選中實體的速度
行駛路線列表
行駛路線列表位于場景編輯器的左下方,在行駛路線列表中存放該場景中的車道路線和不規則軌跡。
- 車道路線
① 新建車道路線:在車道路線列表中,右擊“車道路線”,彈出新建選項,點擊新建路線,會自動新建出一個空的車道路線表格,此時進入“路線模式”,鼠標光標也將變為十字標志。在場景編輯區域內點擊道路即可將指定的道路作為一個路線點添加進表格中,然后可繼續在道路中沿著車輛行駛的下游方向選擇路線點,高亮顯示的車道數量不斷增加,最終完成車道路線的創建。
② 編輯車道路線:對于已經創建的車道路線,可以在車道路線列表中進行選中,然后對車道路線表格中的路線點進行刪除,或通過點擊“新建路線點”按鈕進入車道路線編輯模式,在該路線下游繼續添加路線點以實現路線的進一步延伸。
③ 刪除車道路線:對于已經創建的車道路線,可以在車道路線列表中進行選中,然后右鍵點擊“刪除路線”選項進行整條車道路線的刪除。
- 不規則軌跡
不規則軌跡是由多個坐標點根據一定的連接方式確定的運行軌跡,ModelBase支持以Polyline(折線)、Clothoid(羊角螺旋線)、Nurbs(B樣條曲線)三種方式對選定的坐標點進行自動連接。
① 新建不規則軌跡:在車道路線列表中,右擊“不規則軌跡”,彈出新建選項,點擊新建路線,會自動新建出一個空的不規則軌跡表格,此時進入“不規則軌跡模式”,鼠標光標也將變為十字標志。在場景編輯區域內點擊任意區域即可作為一個軌跡點添加進表格中,在點擊的過程中,新增的軌跡點將與上一個軌跡點已選定的軌跡類型進行自動鏈接,最終形成一條理想的不規則軌跡。
② 編輯不規則軌跡:對于已經創建的不規則軌跡,可以在不規則軌跡列表中進行選中,然后對不規則軌跡表格中的軌跡點進行刪除或坐標值修改,或通過點擊“新建軌跡點”按鈕進入編輯模式,在該軌跡下游繼續添加軌跡點以實現軌跡的進一步延長。
③ 刪除/隱藏不規則軌跡:右鍵不規則軌跡的名稱,例如“trajectory_0”,點擊刪除軌跡,即可將該選中的不規則軌跡刪除。點擊“隱藏軌跡”,即可將選中的不規則軌跡隱藏。
④ 導入不規則軌跡:右擊“不規則軌跡”,點擊“導入軌跡”,彈出選擇窗口。“導入軌跡”功能支持導入 [time latitude longitude altitude heading]或[time latitude longitude altitude]格式的GPS軌跡文件,其中每一列數據需要滿足對應的數據格式,例如:數據文件第一列為時間,第二列為緯度,其余各列以此類推。“導入軌跡” 實際是根據設置的參考經緯度將一系列經緯度軌跡點轉換為世界坐標系下的軌跡點,暫時只用到軌跡點經緯度信息。目前支持導入的類型包括*.txt格式的文本文件、*.xls、*.xlsx 格式的Excel文件。
在完成上述兩種行駛路線的創建后,車道路線和不規則軌跡將分別出現在編輯器左下角的列表中,并在車輛行為配置--初始狀態子界面中,選擇基于“指定不規則軌跡”或“指定車道路線”的行駛路線控制模式時進行對應使用,隨后被設置車輛將沿該路線進行行駛。
ModelBase是經緯恒潤自主研發的綜合駕駛測試仿真軟件,具備車輛動力學模型及智能駕駛場景仿真能力,可用于乘用車、商用車的整車電控系統、ADAS系統的設計、測試和驗證。可以覆蓋電控系統的整個開發周期,包括早期的算法仿真測試(MIL/SIL),控制器的硬件在環測試(HIL),半實物臺架測試(如電機臺架、動力系統臺架、整車臺架等),以及車輛在環測試(VIL)。
ModelBase軟件可免費申請試用,只需要發送【姓名、聯系電話、郵箱、公司/學校名稱、部門/院系、申請版本(動力學版本/智能駕駛版本)】信息到[email protected]即可。
-
仿真
+關注
關注
51文章
4234瀏覽量
135293 -
車輛
+關注
關注
0文章
84瀏覽量
15401 -
仿真軟件
+關注
關注
21文章
254瀏覽量
30878
發布評論請先 登錄
手把手教你如何調優Linux網絡參數
正點原子Linux系列全新視頻教程來啦!手把手教你MP257開發板,讓您輕松入門!
請求贈閱《零基礎開發AI Agent——手把手教你用扣子做智能體》
GPU顯卡維修避坑指南:手把手教你識別行業套路!

KiCad直播活動(三):在 Windows上編譯KiCad 手把手教您編譯/構建 KiCad 源碼

《零基礎開發AI Agent——手把手教你用扣子做智能體》
《手把手教你做星閃無人機—KaihongOS星閃無人機開發實戰》系列課程課件匯總
《手把手教你做PC-KaihongOS筆記本電腦開發實戰》課件匯總
【第四章 定時任務】手把手教你玩轉新版正點原子云
《手把手教你做星閃無人機》即將開播,鎖定15日晚七點!

《手把手教你做PC》課程即將啟動!深開鴻引領探索KaihongOS筆記本電腦開發實戰
Air780E模組LuatOS開發實戰 —— 手把手教你搞定數據打包解包

手把手教你通過宏集物聯網工控屏&網關進行協議轉換,將底層PLC/傳感器的數據轉換為TCP協議并傳輸到用戶
手把手教你排序算法怎么寫






 工商網監
工商網監
評論