") 模糊控制在DC/DC變換器中的兩種不同的應(yīng)用介紹
模糊控制在DC/DC變換器中的兩種不同的應(yīng)用介紹
1 引言
DC/DC變換器是一種強(qiáng)非線性電路,電路的電氣參數(shù)存在不確定性,負(fù)載性質(zhì)也是多變的,主電路的性能必須滿足負(fù)載大范圍的變化,同時(shí)它還具有離散和變結(jié)構(gòu)的特點(diǎn),所有這些使DC/DC變換器控制器的設(shè)計(jì)較為復(fù)雜。由于傳統(tǒng)的控制方法是基于線性系統(tǒng)理論,所以,應(yīng)用于DC/DC變換器中并不能獲得理想的動(dòng)態(tài)性能。
有兩種途徑可以不利用線性系統(tǒng)理論。一種是建立一種精確的非線性模型,但是,這種方法需要復(fù)雜的數(shù)學(xué)推導(dǎo),經(jīng)常導(dǎo)致復(fù)雜的控制算法,而不適合實(shí)際應(yīng)用。另一種方法是把人工智能的啟發(fā)式推理規(guī)則用于學(xué)習(xí)控制系統(tǒng),即智能控制,它不需要建立精確的數(shù)學(xué)模型,并且對(duì)于電路參數(shù)變化具有良好的魯棒性。
2 智能控制
智能控制是控制理論發(fā)展的高級(jí)階段,它的建立和發(fā)展是以眾多新興學(xué)科為基礎(chǔ)的。智能控制的基本出發(fā)點(diǎn)是仿人的智能實(shí)現(xiàn)對(duì)復(fù)雜不確定性系統(tǒng)進(jìn)行有效的控制。目前智能控制設(shè)計(jì)的途徑有:
1)基于專家系統(tǒng)的專家智能控制;
2)基于模糊推理和計(jì)算的模糊控制;
3)基于人工神經(jīng)網(wǎng)絡(luò)的神經(jīng)網(wǎng)絡(luò)控制;
本文將重點(diǎn)討論模糊控制,神經(jīng)網(wǎng)絡(luò)控制以及模糊神經(jīng)網(wǎng)絡(luò)控制在DC/DC變換器中的應(yīng)用。
3 模糊控制在DC/DC變換器中的應(yīng)用
模糊控制是應(yīng)用模糊集合理論的控制方法,提供一種實(shí)現(xiàn)基于知識(shí)(規(guī)則)的,甚至語(yǔ)言描述的控制規(guī)律的新機(jī)理,例如:如果輸出電壓誤差是正的,并且它的變化率是負(fù)的,那么輕微減少占空比等等。所以,模糊控制設(shè)計(jì)方法比較簡(jiǎn)單。雖然,相對(duì)于傳統(tǒng)控制器,模糊控制通常不能提供更好的小信號(hào)響應(yīng),但是,它是基于啟發(fā)式推理規(guī)則的,在非線性的DC/DC變換器中應(yīng)用是非常容易的。
模糊控制的基本思想是基于專家經(jīng)驗(yàn)和領(lǐng)域知識(shí),總結(jié)出若干條以IF(條件)THEN(作用)形式表示的模糊控制規(guī)則,構(gòu)成描述具有不確定性復(fù)雜對(duì)象的模糊關(guān)系,通過被控系統(tǒng)輸出誤差及誤差變化和模糊關(guān)系的推理合成獲得控制量,從而對(duì)系統(tǒng)進(jìn)行控制。
模糊控制采用帶修正因子的模糊控制器,其控制規(guī)則為
μ(k)=ε(k)+(1-α)εc(k)
式中:μ(k)為輸出與測(cè)量值之差;
εc(k)為給定值與測(cè)量值之差,εc(k)=ε(k)-ε(k-1)為誤差變化率;α為加權(quán)修正因子,在0~1之間取值。
通過調(diào)整加權(quán)系數(shù),就可對(duì)控制規(guī)則進(jìn)行修正。以α作為調(diào)整參數(shù)是很方便的,因?yàn)椋寥≈荡笮≈苯佑绊懼豢亓空`差和誤差變化率的加權(quán)程度,當(dāng)被控對(duì)象數(shù)學(xué)模型的階次較高時(shí),對(duì)誤差變化率的加權(quán)應(yīng)大于誤差的加權(quán)值,因而α可取較小值,反之亦然。
模糊控制框圖如圖1所示。模糊控制器被分為4個(gè)部分:
1)模糊化,即將輸入值轉(zhuǎn)化為模糊量;
2)知識(shí)庫(kù),通常由數(shù)據(jù)庫(kù)和模糊控制規(guī)則庫(kù)組成;
3)模糊推理,它是模糊控制器的核心,具有模擬人的,基于模糊概念的推理能力,該推理過程是基于模糊邏輯中的蘊(yùn)涵關(guān)系及推理規(guī)則來進(jìn)行的;
4)非模糊化,即將模糊推理得到的模糊量變換為實(shí)際用于控制的精確量。
圖1 模糊控制框圖
本文介紹了模糊控制在DC/DC變換器中的兩種不同的應(yīng)用。
3.1 模糊控制在DC/DC變換器反饋控制中的應(yīng)用
DC/DC變換器的模糊控制框圖如圖2所示。
圖2 DC/DC變換器的模糊控制框圖
圖中DC/DC變換器用一個(gè)黑箱表示,其上有四個(gè)端子,分別接輸入電壓us,輸出電壓uo,電感電流iL和控制開關(guān)S。其中只有輸出電壓和電感電流送入了模糊控制器。
模糊控制規(guī)則基于以下幾條標(biāo)準(zhǔn):
1)當(dāng)變換器的輸出遠(yuǎn)離設(shè)置點(diǎn)時(shí),大幅度調(diào)整占空比,以使輸出快速回到設(shè)置點(diǎn);
2)當(dāng)變換器的輸出接近設(shè)置點(diǎn)時(shí),可以稍微調(diào)整一下占空比;
3)當(dāng)變換器的輸出在設(shè)置點(diǎn)附近并且快速接近它時(shí),應(yīng)當(dāng)保持占空比不變,以防止有超調(diào)量;
4)當(dāng)變換器的輸出到達(dá)了設(shè)置點(diǎn)并且仍在變化時(shí),稍微變化占空比以防止輸出遠(yuǎn)離設(shè)置點(diǎn);
5)當(dāng)輸出到達(dá)了設(shè)置點(diǎn)并保持穩(wěn)定時(shí),占空比保持不變;
6)當(dāng)輸出超過了設(shè)置點(diǎn),應(yīng)減小占空比,反之亦然。
通常同樣的模糊控制規(guī)則可以應(yīng)用在幾種不同類型的DC/DC變換器中,只是一些比例因子要根據(jù)變換器的不同拓?fù)浜蛥?shù)做相應(yīng)的調(diào)整。
把模糊控制應(yīng)用于Cuk變換器的電壓反饋中,但只利用了輸出電壓和它的變化率,沒有考慮電感電流,雖然與PID控制相比其輸出電壓波動(dòng)小于PID控制,并且具有較快的瞬態(tài)響應(yīng),但是,動(dòng)態(tài)性能還是不夠理想。
分別把模糊控制應(yīng)用于Buck-Boost和Sepic變換器中,模糊控制器利用了三個(gè)輸入變量:輸出電壓誤差εu;電感電流誤差εi;電感電流iL。相對(duì)于只利用輸出電壓變量的模糊控制器來說,動(dòng)態(tài)性能更令人滿意。同時(shí),通過仿真證明了模糊控制與傳統(tǒng)控制方法具有同樣快和穩(wěn)定的小信號(hào)響應(yīng),并且改進(jìn)了大信號(hào)響應(yīng)性能。
3.2 模糊控制在主從均流控制的并聯(lián)DC/DC變換器中的應(yīng)用
利用主從控制方法并聯(lián)工作的變換器具有大量的控制環(huán),所以,很難得到系統(tǒng)的實(shí)際模型。傳統(tǒng)的控制方法是基于簡(jiǎn)單平均化的線性模型,在負(fù)載大范圍變化和存在干擾的情況下,則得不到很好的動(dòng)態(tài)響應(yīng)。模糊控制方法克服了建立復(fù)雜模型的困難,因此,可以應(yīng)用于實(shí)際工程中,并且用數(shù)字和模擬方法都可以實(shí)現(xiàn)。
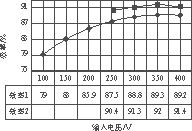
把模糊控制引入到均流環(huán)中,可以得到快速且魯棒性強(qiáng)的瞬態(tài)響應(yīng)。把經(jīng)過PD控制的均流誤差送入模糊控制器,利用PID控制的結(jié)果得出模糊推理規(guī)則,仿真結(jié)果表明負(fù)載分別為額定負(fù)載的50%和90%時(shí),瞬態(tài)響應(yīng)良好。
4 神經(jīng)網(wǎng)絡(luò)控制在DC/DC變換器中的應(yīng)用
神經(jīng)網(wǎng)絡(luò)系統(tǒng)具有輸入、輸出,它由許多個(gè)神經(jīng)元組成。每個(gè)神經(jīng)元有一個(gè)單一的輸出,它可以連接到許多其它的神經(jīng)元,其輸入有多個(gè)連接通路,每個(gè)連接通路對(duì)應(yīng)一個(gè)連接權(quán)系數(shù)。變換權(quán)系數(shù)將改變整個(gè)網(wǎng)絡(luò)的工作性能,我們的目的就是調(diào)整權(quán)系數(shù),以獲得理想的輸入、輸出關(guān)系。
神經(jīng)網(wǎng)絡(luò)控制方法是基于人腦控制行為的生理學(xué)研究而發(fā)展起來的,是一個(gè)具有廣闊應(yīng)用前景的智能控制方法。由于神經(jīng)網(wǎng)絡(luò)具有非線性映射能力、自學(xué)習(xí)適應(yīng)能力、聯(lián)想記憶能力,并行信息處理方式及其優(yōu)良的容錯(cuò)性能,所以,它在非線性和復(fù)雜控制系統(tǒng)中,起著如傳遞函數(shù)在線性系統(tǒng)中所起的作用。
在神經(jīng)網(wǎng)絡(luò)控制系統(tǒng)中,信息處理過程通常分為自適應(yīng)學(xué)習(xí)期和控制期兩個(gè)階段。在學(xué)習(xí)期,網(wǎng)絡(luò)按一定的學(xué)習(xí)規(guī)則調(diào)整其內(nèi)部連接權(quán)系數(shù),使給定的性能指標(biāo)達(dá)到最優(yōu);在控制期,網(wǎng)絡(luò)連接模式和權(quán)系數(shù)已知且不變,各神經(jīng)元根據(jù)輸入信息和狀態(tài)信息產(chǎn)生輸出。兩個(gè)階段可以獨(dú)立完成,也可以交替進(jìn)行。
通常神經(jīng)網(wǎng)絡(luò)在控制中的作用可分為如下幾種:
1)充當(dāng)系統(tǒng)的模型,構(gòu)成各種控制結(jié)構(gòu),如在內(nèi)模控制,模型參考,自適應(yīng)控制,預(yù)測(cè)控制中,充當(dāng)對(duì)象的模型等;
2)在反饋控制系統(tǒng)中直接用作控制器;
3)在控制系統(tǒng)中起優(yōu)化計(jì)算的作用;
4)在與其它智能控制方法和優(yōu)化算法相融合中,為其提供非參數(shù)化對(duì)象模型,優(yōu)化參數(shù),推理模型及故障診斷等。
目前,國(guó)內(nèi)外學(xué)者提出了許多面向?qū)ο蟮纳窠?jīng)網(wǎng)絡(luò)控制結(jié)構(gòu)和方法,較具代表性的有神經(jīng)網(wǎng)絡(luò)監(jiān)督控制,神經(jīng)網(wǎng)絡(luò)直接逆動(dòng)態(tài)控制,神經(jīng)網(wǎng)絡(luò)參數(shù)估計(jì)自適應(yīng)控制,神經(jīng)網(wǎng)絡(luò)模型參考自適應(yīng)控制,神經(jīng)網(wǎng)絡(luò)內(nèi)模控制,神經(jīng)網(wǎng)絡(luò)預(yù)測(cè)控制。
雖然,神經(jīng)網(wǎng)絡(luò)應(yīng)用于非線性系統(tǒng)已經(jīng)有很多年了,但是,主要把它用于機(jī)器人技術(shù)和自動(dòng)控制系統(tǒng)。在電力電子領(lǐng)域,神經(jīng)網(wǎng)絡(luò)的應(yīng)用還處于初級(jí)階段,最近,不斷有文章報(bào)道用神經(jīng)網(wǎng)絡(luò)來控制DC/DC變換器,這預(yù)示著神經(jīng)網(wǎng)絡(luò)在DC/DC變換器中的應(yīng)用將會(huì)不斷增多。
把神經(jīng)網(wǎng)絡(luò)間接應(yīng)用于PWMBoost變換器中,如圖3所示。
圖3 Boost變換器的神經(jīng)網(wǎng)絡(luò)控制
其中,用神經(jīng)網(wǎng)絡(luò)控制器產(chǎn)生變換器的控制信號(hào),進(jìn)行反饋控制,用神經(jīng)網(wǎng)絡(luò)仿真器識(shí)別變換器的參數(shù)變化。并且神經(jīng)網(wǎng)絡(luò)控制系統(tǒng)自動(dòng)學(xué)習(xí)變換器工作時(shí)的動(dòng)態(tài)特性。由于PWM變換器通常是二階系統(tǒng),所以,對(duì)于變換器的輸入和輸出,兩個(gè)延遲單元是足夠的。
由神經(jīng)網(wǎng)絡(luò)間接控制的Boost變換器不需要知道雅可比行列式,也不用考慮參數(shù)變化,在遇到大信號(hào)擾動(dòng)時(shí),也不需要利用傳遞函數(shù)方法來處理。
計(jì)算機(jī)仿真結(jié)果表明,即使在高頻脈沖電源電壓和高頻脈沖參考信號(hào)的條件下,神經(jīng)網(wǎng)絡(luò)控制系統(tǒng)都能提供良好的動(dòng)態(tài)響應(yīng)。
把神經(jīng)網(wǎng)絡(luò)控制器應(yīng)用于Buck變換器中。首先,把Buck變換器在一個(gè)工作點(diǎn)線性化,進(jìn)行PI控制,由此得到神經(jīng)網(wǎng)絡(luò)離線訓(xùn)練的數(shù)據(jù)集合,這種訓(xùn)練時(shí)間長(zhǎng),并且依賴于數(shù)據(jù)集合的大小和特性,但是,依然能得到良好的控制結(jié)果。而在線訓(xùn)練的神經(jīng)網(wǎng)絡(luò)控制器設(shè)計(jì)的時(shí)間少,在變化的負(fù)載條件下能夠提供最精確和統(tǒng)一的結(jié)果。
提出用神經(jīng)網(wǎng)絡(luò)辨識(shí)和控制一個(gè)反激準(zhǔn)諧振變換器。神經(jīng)網(wǎng)絡(luò)控制器用來調(diào)節(jié)輸出電壓,它由3層組成,輸入層有8個(gè)神經(jīng)元,隱層有24個(gè)神經(jīng)元,輸出層有一個(gè)神經(jīng)元。4個(gè)輸入分別為輸入電壓變化量,電感電流變化量,負(fù)載電流變化量,輸出電壓相對(duì)于參考值的變化量。控制器的輸出能夠調(diào)節(jié)輸出電壓的開關(guān)頻率。控制方法采用監(jiān)督學(xué)習(xí)的神經(jīng)網(wǎng)絡(luò)控制,用BP算法,并由Levenberg-Marquedet規(guī)則改進(jìn)。仿真結(jié)果表明系統(tǒng)的精度和魯棒性都得到了改善。這種神經(jīng)網(wǎng)絡(luò)控制器的優(yōu)點(diǎn)可總結(jié)如下:
1)降低了輸出電壓的偏差,提高了控制系統(tǒng)的精度;
2)對(duì)于輸入電壓和負(fù)載的變化,具有快速的響應(yīng);
3)由于神經(jīng)網(wǎng)絡(luò)控制器的輸出是開關(guān)頻率,這可以直接而且很容易完成文中的控制算法。
5 神經(jīng)模糊控制在DC/DC變換器中的應(yīng)用
神經(jīng)網(wǎng)絡(luò)和模糊控制在對(duì)信息的加工處理過程中,均表示出很強(qiáng)的容錯(cuò)能力,它們?cè)谔幚砗徒鉀Q問題時(shí),不需要對(duì)象的精確的數(shù)學(xué)模型;從數(shù)據(jù)處理的形式上看,它們均采用并行處理的結(jié)構(gòu),當(dāng)輸入信號(hào)進(jìn)入模糊控制系統(tǒng)時(shí),所有的模糊規(guī)則將依據(jù)條件的適用度決定是否被激發(fā),并且由被激發(fā)的規(guī)則決定系統(tǒng)的輸出。對(duì)神經(jīng)網(wǎng)絡(luò)而言,它本身就是由并行結(jié)構(gòu)的神經(jīng)元構(gòu)成。
但是,模糊系統(tǒng)和神經(jīng)網(wǎng)絡(luò)有著明顯的不同之處。神經(jīng)網(wǎng)絡(luò)雖然對(duì)環(huán)境的變化具有較強(qiáng)的自適應(yīng)學(xué)習(xí)能力,但從系統(tǒng)建模的角度而言,它采用的是典型的黑箱型的學(xué)習(xí)模式。因此,當(dāng)學(xué)習(xí)完成之后,神經(jīng)網(wǎng)絡(luò)所獲得的輸入和輸出關(guān)系,無法用容易被人接受的方式表示出來。相反,模糊系統(tǒng)是建立在被人容易接受的“IFTHEN”表示方法之上。但如何自動(dòng)生成和調(diào)整隸屬函數(shù)的模糊規(guī)則,則是一個(gè)很棘手的問題。
基于以上分析可知,上述兩類系統(tǒng)的相似點(diǎn)構(gòu)成了融合的基礎(chǔ),而它們的不同點(diǎn)又為融合方式研究提供了可能。
神經(jīng)網(wǎng)絡(luò)和模糊邏輯有以下幾種的相結(jié)合方式:
1)神經(jīng)模糊系統(tǒng)在模糊模型中用神經(jīng)網(wǎng)絡(luò)作為工具;
2)模糊神經(jīng)網(wǎng)絡(luò)把常規(guī)的神經(jīng)網(wǎng)絡(luò)模型模糊化;
3)模糊-神經(jīng)混合系統(tǒng)把模糊技術(shù)和神經(jīng)網(wǎng)絡(luò)結(jié)合起來形成混合系統(tǒng)。
提出用神經(jīng)模糊控制器控制Cuk變換器,如圖4所示。由于模糊變量的隸屬函數(shù)通常是基于專家知識(shí)得到的,這要依賴于過去的經(jīng)驗(yàn),并不能給出優(yōu)化的性能。文獻(xiàn)[7]利用神經(jīng)網(wǎng)絡(luò)設(shè)計(jì)隸屬函數(shù),把神經(jīng)網(wǎng)絡(luò)作為隸屬函數(shù)生成器組合在模糊控制系統(tǒng)中。控制器的輸入為電壓誤差和電壓誤差變化率,輸出為變換器PWM的占空比。神經(jīng)網(wǎng)絡(luò)由BP學(xué)習(xí)算法調(diào)節(jié),作用函數(shù)為S(x)。神經(jīng)模糊控制器經(jīng)過離線訓(xùn)練后,用來調(diào)節(jié)Cuk變換器。通過仿真證明,當(dāng)負(fù)載變化時(shí),神經(jīng)模糊控制器比PI控制器的動(dòng)態(tài)響應(yīng)更好。
圖4 Cuk變換器的神經(jīng)模糊控制系統(tǒng)
6 結(jié)語(yǔ)
目前,智能控制在DC/DC變換器中的應(yīng)用非常少,還只是停留在仿真階段,尤其是國(guó)內(nèi)鮮有文章報(bào)道。考慮到經(jīng)濟(jì)和體積方面的原因,以及智能控制整個(gè)理論體系還不成熟,所以,智能控制的DC/DC變換器還需要一定的時(shí)間才能應(yīng)用于實(shí)際。但是,隨著智能控制應(yīng)用工程的日益成熟,各種軟硬件技術(shù)的開發(fā),尤其是最近高速廉價(jià)的數(shù)字信號(hào)處理器(DSP)的應(yīng)用,大大方便了智能控制應(yīng)用系統(tǒng)的實(shí)現(xiàn),這使得具有優(yōu)良性能的智能控制的DC/DC變換器更加受到人們的重視,從而可得到長(zhǎng)足的發(fā)展。
-
變換器
+關(guān)注
關(guān)注
17文章
2130瀏覽量
110385 -
模糊控制
+關(guān)注
關(guān)注
2文章
261瀏覽量
25746
發(fā)布評(píng)論請(qǐng)先 登錄





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論